Pada Bab IV dijelaskan tentang rencana implementasi dari sistem, spesifikasi sistem, prosedur pengoperasian sistem dan evaluasi hasil pengujian pada sistem.
4.1 Spesifikasi Sistem
Adapun spesifikasi dari alat bantu ultrasonik untuk reorientasi mobile robot yang dibuat pada skripsi ini :
Modul transmitter :
- Menggunakan catu daya berupa dua buah baterai 9 volt.
- Tegangan catu daya diturunkan sampai 16 volt yang kemudian digunakan sebagai tegangan untuk IC timer NE555 dan penguat op-amp CA3130.
- Besar frekuensi osilasi yang dibangkitkan dari timer adalah 40 KHz.
- Untuk modul transmitter digunakan sebuah sensor ultrasonik yang berfungsi sebagai transmitter.
Modul receiver :
- Menggunakan catu daya langsung dari sumber listrik atau menggunakan satu buah baterai NiCd sebesar 12 volt yang dapat diisi kembali bila kosong.
- Dalam modul receiver terdapat 8 buah modul sensor, sebuah modul sistem minimum dan ADC, sebuah modul driver motor stepper, sebuah modul rangkaian power supply dan sebuah kipas pendingin.
93
CA3130 menggunakan catu tegangan sebesar 12 volt dan IC LM567 menggunakan tegangan sebesar 5 volt. Untuk menyaring frekuensi 40 KHz yang dikirimkan transmitter ultrasonik maka digunakan tone decoder. Dalam modul sensor juga terdapat rangkaian peak detector yang kegunaannya untuk mengukur tegangan DC dari sinyal AC.
- Pada modul sistem minimum terdapat mikrokontroler AT89C52 dan ADC0809 yang mendapat catu tegangan sebesar 5 volt.
- Pada modul driver motor stepper terdapat IC L297 dan IC L298. IC L297 mendapat tegangan sebesar 5 volt sementara IC L298 mendapat tegangan sebesar 23,4 volt dari listrik dan 12 volt dari baterai NiCd. Jenis motor stepper yang digunakan adalah motor stepper 2 kutub.
- Modul rangkaian power supply menggunakan transformator sebesar 2A.
- Kipas pendingin mendapat tegangan sebesar 12 volt.
4.2 Prosedur Operasional
Bagian ini menjelaskan cara mengoperasikan alat yang telah dirancang.
Secara garis besar cara mengoperasikan alat ini terbagi menjadi pengoperasian untuk modul transmitter dan modul receiver. Berikut adalah penjelasannya :
Modul transmitter
• Mengaktifkan saklar utama dan kemudian mengatur potensio untuk mengatur jarak. Bila potensio diputar searah jarum jam maka jarak pemanggilan
berarti jarak pemanggilan semakin dekat.
• Tekan tombol untuk melakukan pemanggilan dan arahkan modul transmitter kepada modul receiver. Penekanan tombol dapat dilakukan secara sesaat ataupun secara seterusnya.
Modul receiver
• Sebelum mengaktifkan modul receiver, terlebih dahulu menyesuaikan kepala motor stepper ke arah modul sensor nomor satu.
• Modul receiver dapat aktif dengan menggunakan dua macam tenaga yaitu dari listrik 220VAC/50Hz dan dari baterai.
• Bila menggunakan tenaga dari listrik, maka sambungkan kabel listrik ke sumber listrik. LED biru atau kipas pendingin dalam modul receiver akan segera menyala dan menandakan alat telah aktif.
• Bila menggunakan tenaga dari baterai, maka nyalakan saklar baterai yang ada di dalam modul receiver. LED biru atau kipas pendingin dalam modul receiver akan segera menyala dan menandakan alat telah aktif.
4.3 Implementasi Sistem
Alat bantu ultrasonik dirancang sebagai suatu fitur dalam mobile robot.
Mobile robot yang dilengkapi alat bantu ultrasonik akan dapat mengetahui arah dari pemanggil mobile robot tersebut. Dalam implementasinya terhadap suatu mobile robot, alat bantu ultrasonik dapat menjadi penunjuk arah datang dari
tersebut dan bergerak ke arahnya. Bila tidak dipasangkan pada mobile robot, alat bantu pendengaran ultrasonik ini dapat bekerja untuk menunjukkan reorientasi dari pemanggilnya. Untuk menyatukan alat bantu dengan mobile robot, maka diperlukan studi lebih mendalam dalam hal interfacing dan pengaturan bobot dari alat bantu tersebut agar sesuai dengan mobile robot yang ada. Oleh karena implementasi dari alat bantu ultrasonik ini adalah pada mobile robot, maka bentuk wadahnya juga telah disesuaikan untuk dipasangkan pada mobile robot.
4.4 Evaluasi Sistem
Pada evaluasi sistem dilakukan serangkaian pengujian yang bertujuan untuk mengetahui kelebihan dan kekurangan dari sistem alat bantu ultrasonik yang telah dibuat. Pengujian dilakukan dengan menguji perangkat keras dan menguji piranti lunak. Pengujian pada perangkat keras dibagi menjadi pengujian untuk modul receiver, pengujian peak detector, pengujian debugger, pengujian untuk melihat efek pemantulan dan pengujian tingkat kesalahan pada sistem.
Pengujian pada piranti lunak dilakukan dengan pengujian menghitung waktu untuk konversi data di ADC dan pengujian menghitung kecepatan perputaran motor stepper. Pada sub-bab berikutnya akan dijelaskan keseluruhan pengujian pada sistem alat bantu ultrasonik yang telah dibuat.
Pengujian pada modul receiver dilakukan dengan cara menguji jarak antara transmitter dan receiver ultrasonik. Pengujian ini bertujuan untuk mencari jarak optimum pemanggilan antara modul transmitter dengan modul receiver.
Jarak optimum adalah jarak pemanggilan pada saat motor stepper (di modul receiver) dapat langsung mengetahui orientasi dari pemanggilnya. Apabila motor stepper mulai menunjukkan orientasi yang tidak tepat dari pemanggilnya, maka jarak pemanggilan tersebut sudah bukan merupakan jarak optimum pemanggilan.
Metode pengambilan data pada pengujian ini adalah dengan mengambil data tegangan dari seluruh receiver ultrasonik yang berada di dalam modul receiver. Tegangan yang diambil adalah tegangan analog yang diterima input analog ADC. Terdapat delapan receiver ultrasonik yang masing-masing berada pada modul sensor. Oleh karena itu, terdapat delapan tabel data percobaan untuk setiap data tegangan dari modul sensor. Jarak yang digunakan adalah dari 0 cm sampai dengan 420 cm dan pengukuran untuk pengambilan data dilakukan setiap 30 cm. Pengukuran ini juga dilakukan dalam ruangan 5 x 5 m2 dengan kondisi ruangan tidak berisik agar tidak ada noise yang mengganggu selama pengambilan data. Jarak antara transmitter ultrasonik dengan receiver ultrasonik diarahkan secara point to point. Selain tegangan receiver point to point, dihitung pula tegangan receiver ultrasonik yang berada di kanan dan di kiri dari receiver ultrasonik yang diarahkan secara point to point. Gambar 4.1 memperlihatkan ilustrasi untuk pengambilan data pada pengujian ini. Dari gambar tersebut diperlihatkan bahwa modul receiver berada pada satu sisi dan modul transmitter pada sisi lainnya.
Modul Receiver
Minimum ( 0 cm ) Maksimum ( 420 cm )
5 m 5 m
Gambar 4.1 Ilustrasi pengambilan data
Nilai tegangan memiliki peranan penting karena nilai tegangan inilah yang akan dijadikan data untuk pergerakan motor stepper. Sebagai catu daya dari modul receiver digunakan listrik PLN 220VAC/50Hz dan sebagai catu daya dari modul transmitter digunakan power supply sebesar 18 volt pada titik sebelum regulator 12 volt. Nilai tegangan yang dicari adalah dalam satuan volt dan jarak dalam satuan centimeter. Berikut akan diberikan data dari receiver ultrasonik 1 sampai dengan receiver ultrasonik 8.
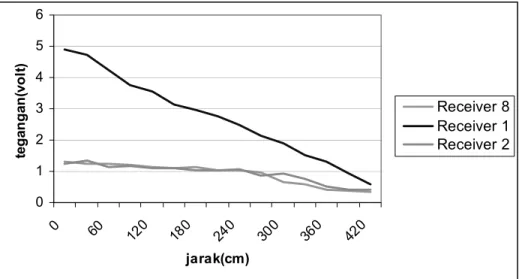
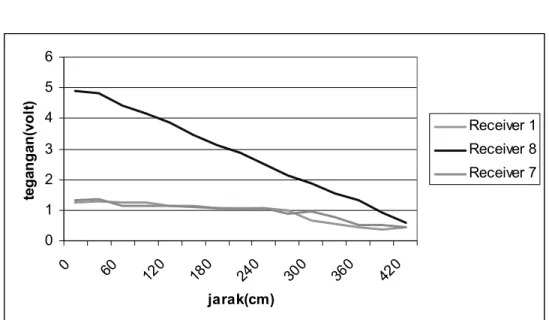
Untuk receiver ultrasonik 1 pada modul sensor 1, tegangan yang diterima pada jarak 0 cm adalah 4,88 volt. Sementara itu tegangan pada receiver ultrasonik 2 adalah 1,23 volt dan tegangan pada receiver ultrasonik 8 adalah 1,3 volt. Pada jarak ini, motor stepper dapat langsung mengarah tepat ke modul
yang posisinya point to point dengan transmitter ultrasonik lebih besar dari tegangan receiver ultrasonik yang posisinya tidak point to point dengan modul transmitter. Meskipun begitu, jarak optimum receiver ultrasonik 1 bukanlah dari 0 sampai dengan 420 cm. Jarak optimum receiver ultrasonik 1 adalah dari 0 sampai 300 cm. Jarak tersebut diambil karena pada jarak 301 cm sampai dengan 420 cm, motor stepper mendapat kesulitan untuk mengarah ke modul transmitter.
Data untuk receiver ultrasonik 1 sampai dengan receiver ultrasonik 8 diperlihatkan dalam tabel 4.1 sampai dengan 4.8 dan grafiknya pada gambar 4.2 sampai dengan gambar 4.9.
0 1 2 3 4 5 6
0 60 120
180 240
300 360
420 jarak(cm)
tegangan(volt)
Receiver 8 Receiver 1 Receiver 2
Gambar 4.2 Grafik data dari modul sensor 1 Tabel 4.1 Data modul sensor 1
Receiver/jarak 0 30 60 90 120 150 180 210 Receiver 8 1.3 1.25 1.24 1.2 1.13 1.12 1.14 1.05 Receiver 1 4.82 4.71 4.24 3.76 3.55 3.13 2.95 2.77 Receiver 2 1.23 1.35 1.14 1.16 1.12 1.12 1.05 1.02 Receiver/jarak 240 270 300 330 360 390 420 Receiver 8 1.02 0.98 0.65 0.57 0.42 0.37 0.36 Receiver 1 2.48 2.14 1.89 1.53 1.32 0.92 0.6 Receiver 2 1.08 0.87 0.94 0.76 0.52 0.4 0.4
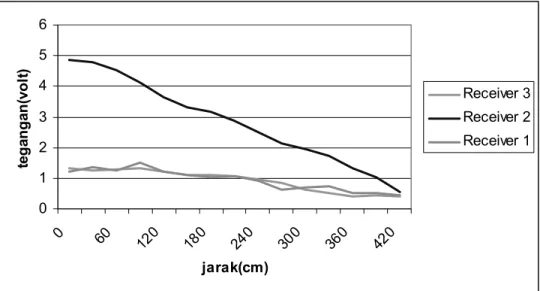
Receiver 3 1.32 1.26 1.3 1.32 1.21 1.1 1.12 1.08 Receiver 2 4.86 4.8 4.52 4.12 3.63 3.32 3.15 2.87 Receiver 1 1.23 1.35 1.24 1.5 1.2 1.12 1.02 1.05 Receiver/jarak 240 270 300 330 360 390 420 Receiver 3 0.95 0.84 0.63 0.53 0.42 0.44 0.42 Receiver 2 2.5 2.12 1.94 1.74 1.34 1.04 0.57 Receiver 1 0.91 0.64 0.7 0.73 0.51 0.5 0.46
0 1 2 3 4 5 6
0 60 120
180 240
300 360
420 jarak(cm)
tegangan(volt)
Receiver 3 Receiver 2 Receiver 1
Gambar 4.3 Grafik data dari modul sensor 2
Tabel 4.3 Data modul sensor 3
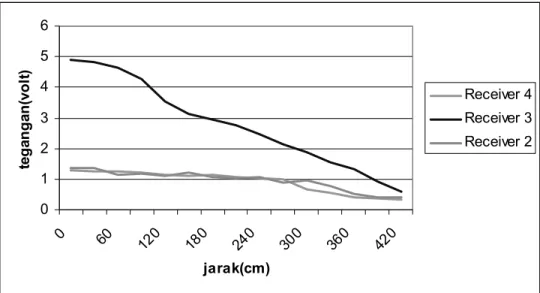
Receiver/jarak 0 30 60 90 120 150 180 210 Receiver 4 1.3 1.25 1.24 1.2 1.13 1.12 1.14 1.04 Receiver 3 4.87 4.82 4.63 4.26 3.52 3.13 2.95 2.77 Receiver 2 1.35 1.35 1.14 1.16 1.12 1.21 1.05 1.02 Receiver/jarak 240 270 300 330 360 390 420 Receiver 4 1.02 0.98 0.65 0.57 0.42 0.37 0.33 Receiver 3 2.48 2.14 1.89 1.53 1.32 0.92 0.6 Receiver 2 1.08 0.87 0.94 0.76 0.52 0.4 0.4
0 1 2 3 4 5
0 60 120
180 240
300 360
420 jarak(cm)
tegangan(volt)
Receiver 4 Receiver 3 Receiver 2
Gambar 4.4 Grafik data dari modul sensor 3 Tabel 4.4 Data modul sensor 4
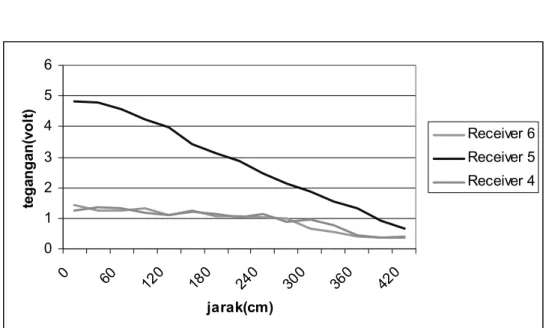
Receiver/jarak 0 30 60 90 120 150 180 210 Receiver 5 1.35 1.24 1.25 1.2 1.18 1.21 1.12 1.06 Receiver 4 4.86 4.78 4.52 4.14 3.89 3.64 3.24 2.87 Receiver 3 1.43 1.24 1.31 1.25 1.15 1.12 1.16 1.06 Receiver/jarak 240 270 300 330 360 390 420 Receiver 5 0.97 0.75 0.6 0.53 0.45 0.46 0.45 Receiver 4 2.64 2.31 1.88 1.53 1.32 1.05 0.75 Receiver 3 1.1 0.96 0.92 0.76 0.54 0.42 0.42
0 1 2 3 4 5 6
0 60 120
180 240
300 360
420 jarak(cm)
tegangan(volt)
Receiver 5 Receiver 4 Receiver 3
Gambar 4.5 Grafik data dari modul sensor 4
Receiver 6 1.45 1.25 1.24 1.31 1.12 1.24 1.07 1.05 Receiver 5 4.84 4.8 4.56 4.22 3.96 3.42 3.14 2.86 Receiver 4 1.24 1.35 1.32 1.16 1.12 1.23 1.15 1.03 Receiver/jarak 240 270 300 330 360 390 420 Receiver 6 1.02 0.98 0.65 0.57 0.42 0.37 0.42 Receiver 5 2.48 2.14 1.88 1.53 1.34 0.92 0.66 Receiver 4 1.14 0.87 0.94 0.76 0.45 0.38 0.35
0 1 2 3 4 5 6
0 60 120
180 240
300 360
420 jarak(cm)
tegangan(volt)
Receiver 6 Receiver 5 Receiver 4
Gambar 4.6 Grafik data dari modul sensor 5
Tabel 4.6 Data modul sensor 6
Receiver/jarak 0 30 60 90 120 150 180 210 Receiver 7 1.33 1.25 1.24 1.18 1.13 1.15 1.14 1.07 Receiver 6 4.85 4.82 4.52 4.33 4.12 3.57 3.21 2.89 Receiver 5 1.23 1.35 1.14 1.16 1.12 1.12 1.08 1.02 Receiver/jarak 240 270 300 330 360 390 420 Receiver 7 1.02 0.76 0.6 0.57 0.52 0.44 0.44 Receiver 6 2.65 2.31 1.98 1.67 1.25 0.91 0.64 Receiver 5 1.08 0.87 0.94 0.72 0.49 0.45 0.45
0 1 2 3 4 5
0 60 120
180 240
300 360
420 jarak(cm)
tegangan(volt)
Receiver 7 Receiver 6 Receiver 5
Gambar 4.7 Grafik data dari modul sensor 6 Tabel 4.7 Data modul sensor 7
Receiver/jarak 0 30 60 90 120 150 180 210 Receiver 8 1.28 1.25 1.26 1.2 1.13 1.18 1.14 1.05 Receiver 7 4.88 4.81 4.52 4.12 3.78 3.32 2.96 2.77 Receiver 6 1.4 1.35 1.14 1.16 1.12 1.18 1.05 1.07 Receiver/jarak 240 270 300 330 360 390 420 Receiver 8 1.02 0.98 0.67 0.57 0.45 0.37 0.36 Receiver 7 2.54 2.13 1.89 1.53 1.24 0.95 0.6 Receiver 6 1.08 0.87 0.94 0.76 0.52 0.45 0.42
0 1 2 3 4 5 6
0 60 120
180 240
300 360
420 jarak(cm)
tegangan(volt)
Receiver 8 Receiver 7 Receiver 6
Gambar 4.8 Grafik data dari modul sensor 7
Receiver 1 1.25 1.28 1.24 1.25 1.15 1.13 1.06 1.06 Receiver 8 4.88 4.82 4.42 4.16 3.87 3.45 3.12 2.87 Receiver 7 1.31 1.35 1.14 1.15 1.14 1.12 1.05 1.02 Receiver/jarak 240 270 300 330 360 390 420 Receiver 1 1.05 0.98 0.66 0.57 0.46 0.37 0.45 Receiver 8 2.49 2.15 1.88 1.53 1.33 0.92 0.58 Receiver 7 1.08 0.87 0.96 0.76 0.52 0.51 0.44
0 1 2 3 4 5 6
0 60 120
180 240
300 360
420 jarak(cm)
tegangan(volt)
Receiver 1 Receiver 8 Receiver 7
Gambar 4.9 Grafik data dari modul sensor 8
4.4.2 Pengujian Peak Detector
Nilai tegangan awal adalah nilai tegangan yang ada pada input ADC pada saat tidak terjadi penekanan tombol pada modul transmitter. Nilai tegangan tersebut menjadi acuan karena bila nilai tegangan yang diterima pada saat terjadi penembakan adalah lebih besar sama dengan dari nilai tegangan awal, maka ADC akan memproses keluaran yang didapatkan dari tegangan awal. Tabel 4.9 menunjukkan nilai tegangan awal yang telah didapatkan.
peranan sebagai penyedia tegangan analog untuk ADC. Hal ini disebabkan peak detector memiliki kegunaan untuk mengukur tegangan DC dari sinyal AC. Untuk mengukur tegangan DC dari sinyal AC, memerlukan sebuah dioda dan kapasitor (lihat gambar 4.10b). Dengan menggunakan kapasitor sebesar 1 nF didapatkan hasil keluaran tegangan DC yang cukup rata. (lihat gambar 4.10c).
Analisa pada peak detector dilakukan jika dari masukan yang diberikan terdapat tegangan offset yang dapat mengganggu sinyal tegangan AC. Tegangan offset ini dihasilkan karena penguat op-amp menggunakan single supply (lihat lampiran CA3130, L7 hal 1). Konsep tersebut mengharuskan untuk membuat rangkaian pembagi tegangan yang berguna sebagai referensi ground kepada masukan penguat op-amp non-inverting.
Pada saat masukan diberikan pada modul sensor, sinyal yang telah dikuatkan pada titik sebelum melewati dioda akan berada pada skala 6 volt diatas ground (lihat gambar 4.10a). Hal ini yang menjadi penyebab terganggunya tegangan DC yang akan dihasilkan. Setelah melewati dioda, tegangan DC akan berkurang sebesar 0,7 volt dan menjadi 5,3 volt (lihat gambar 4.10b). Jika tegangan DC sebesar 5,3 volt ini dikonversikan pada ADC maka akan menghasilkan nilai 0FFh. Sedangkan tegangan referensi pada ADC hanya sebesar 5 volt. Untuk mengeliminasi tegangan offset sebesar 5,3 volt, seharusnya dibutuhkan dioda zener sebesar 5,3 volt. Namun karena input maksimum yang diterima adalah sekitar 11 volt, maka jika dipotong oleh dioda zener 5,3 volt akan menyisakan tegangan sebesar 6 volt lebih. Sisa tegangan 6 volt ini apabila dijadikan input kepada ADC akan menghasilkan nilai 0FFh digital pada
jika digunakan pada saat input maksimum akan memotong tegangan yang tersisa menjadi sekitar 5 volt.
6 V
frekuensi amplitudo
5,3 V
amplitudo
frekuensi
5,3 V
frekuensi amplitudo
+/-0,4 V
frekuensi amplitudo
(a)
(b)
(c)
(d)
Gambar 4.10 Pemotongan tegangan offset
Hasil pemotongan tegangan dapat dilihat pada tabel 4.1. Dari tabel tersebut, dijelaskan bahwa nilai tegangan yang dihasilkan berbeda-beda karena dioda zener mempunyai arus bocoran yang kecil sekali (µA), sehingga arus bocoran ini akan menghasilkan tegangan jatuh pada resistor (R13). Jika dilihat dari gambar 4.10d, hasil pemotongan tegangan menurut teori seharusnya berada di titik nol, akan tetapi karena adanya pengaruh arus bocoran maka akan mengakibatkan nilai pemotongan tegangan tersebut tidak dapat mencapai titik nol.
Sensor Nilai tegangan ( Volt ) Modul receiver 1
0.44
Modul receiver 2
0.38
Modul receiver 3
0.41
Modul receiver 4
0.31
Modul receiver 5
0.44
Modul receiver 6
0.42
Modul receiver 7
0.43
Modul receiver 8
0.35
4.4.3 Pengujian Pada Debugger
Untuk membantu melihat hasil keluaran ADC diperlukan sebuah alat penguji hasil konversi ADC. Alat ini juga dapat difungsikan untuk mengecek keadaan tone decoder yang mempunyai kondisi low. Contoh keluaran dari debugger pada saat input ADC diberikan tegangan 2,86 volt, maka debugger akan menunjukkan hasil keluaran berupa lampu hidup (high) dan lampu mati (low). Jika dilihat dari kiri ke kanan, LED merah yang berwarna terang akan mendapatkan kombinasi digital keluaran 10010110 dari ADC. Selain itu bentuk alat ini sangat sederhana dan hanya terdiri dari LED dan tahanan. Rangkaian debugger diperlihatkan pada gambar 4.11 berikut ini dengan nilai hambatannya adalah 33 Ω.
R1
LED1
R2
LED2 R3
LED3 R4
LED4 R5
LED5
R6
LED6
R1
LED1
R2
LED2
Gambar 4.11 Rangkaian Debugger
4.4.4 Pengujian Sistem Terhadap Pemantulan
Pengujian sistem alat bantu ultrasonik terhadap pemantulan bertujuan untuk mengetahui efek pemantulan yang terjadi pada saat pemanggilan.
Pemantulan dapat terjadi karena salah satu karakteristik dari gelombang ultrasonik adalah dapat dipantulkan. Oleh karena itu, orientasi dapat keliru karena terjadi pemantulan saat pemanggilan dengan modul transmitter. Pada pengujian ini, alat bantu ultrasonik ditempatkan dalam ruangan 120 x 90 cm2 dan dengan temperatur ruangan 22o Celsius. Sebuah sekat dengan panjang 75 cm digunakan untuk memisahkan modul transmitter dengan modul receiver. Bahan yang digunakan untuk membuat dinding ruangan beserta sekatnya adalah dengan menggunakan bahan acrylic. Pada pengujian sistem terhadap pemantulan, dilakukan pengujian sebanyak 6 kali dari titik nomor 5 sampai titik point to point.
Tabel 4.10 memperlihatkan data pengambilan tegangan pada setiap modul sensor untuk pengujian dari titik nomor 5 sampai titik point to point.
Titik / Receiver 8 7 6 5 4 3 2 1 5 1.14 0.43 0.42 0.44 0.31 0.41 0.38 0.44 4 0.35 0.43 0.42 0.44 0.31 0.79 1.57 0.92 3 2.12 1.32 0.42 0.44 0.31 0.41 0.85 1.27 2 0.58 1.64 2.88 0.94 0.31 0.41 0.38 0.44 1 0.93 1.73 3.43 2.36 0.47 0.41 0.38 0.44 point to point 0.35 0.62 3.18 4.43 0.69 0.41 0.38 0.44
Pada pengujian pertama, yaitu dari titik nomor 5, modul receiver menunjukkan arah orientasi ke modul sensor nomor 8. Dari arah tersebut, ternyata ditemukan empat buah pemantulan setelah modul transmitter mengirimkan sinyal. Sudut pemantulan yang terjadi adalah 90o karena permukaan tembok yang rata. Gambar 4.12 memperlihatkan posisi modul transmitter dan modul receiver di dalam ruangan yang telah disekat. Dari gambar tersebut, terlihat bahwa orientasi dari modul receiver tidak mengarah ke modul transmitter. Arah yang ditunjuk modul receiver adalah arah datang dari pemantulan. Hal ini mengakibatkan terjadinya kekeliruan dalam orientasi.
Kekeliruan yang terjadi juga dibuktikan dengan perhitungan tegangan pada 8 modul sensor. Dari perhitungan tegangan, ditunjukkan bahwa tegangan yang diterima modul sensor nomor 8 lebih besar daripada tegangan pada modul sensor lainnya. Dari tabel 4.10, ditunjukkan bahwa sensor nomor 8 menerima tegangan sebesar 1,14 volt dan sensor-sensor di sebelahnya menerima tegangan dibawah 1 volt. Oleh karena itu, motor stepper mengarah ke modul sensor nomor 8.
45.0°
120 cm
75 cm
R
1
2
4
90.0°
90.0°
90.0°
90.0°
1 2
3 5 4 6
7 5
3
Gambar 4.12 Posisi pengujian pertama
Pada pengujian kedua, modul receiver diletakkan pada titik nomor 4 dan menunggu datangnya gelombang ultrasonik dari modul transmitter. Pada saat menerima gelombang ultrasonik, modul receiver menunjukkan orientasi ke arah pemantulan yaitu modul sensor nomor 2. Gambar 4.13 menunjukkan keadaan alat bantu ultrasonik pada saat pengambilan data untuk pengujian kedua. Dari gambar tersebut, terjadi 3 titik pemantulan dan tegangan terbesar berada pada modul sensor 2. Dari tabel 4.10, diperoleh data tegangan untuk modul sensor 2 adalah 1,57 volt. Selain modul sensor 2, dua modul sensor di sekitarnya juga mendapat frekuensi yang sama dengan frekuensi yang diterima modul sensor 2.
Namun tegangan dua modul sensor tersebut ( modul sensor 1 dan 3) lebih kecil daripada tegangan modul sensor 2. Berikutnya sistem alat bantu diuji dari titik 3 dan gambar 4.14 memperlihatkan keadaan pada saat pengambilan data.
90.0°
1 3
R
2
4
90.0°
90.0°
75 cm
45.0°
5
120 cm 1
3 5 4 6 7
8
Gambar 4.13 Posisi pengujian kedua
3
R
2
4 1
75 cm
45.0°
90.0°
90.0°
5
120 cm
90 cm
1 2
3 4 5 6 7
Gambar 4.14 Posisi pengujian ketiga
Modul sensor yang mendapat tegangan terbesar pada saat pengujian ketiga adalah modul sensor nomor 8. Oleh karena dua buah pemantulan yang terjadi, maka modul receiver tidak menunjukkan orientasi yang tepat melainkan orientasi dari arah pemantulan yang ditunjuknya. Pada pengujian selanjutnya
modul receiver. Dengan demikian, orientasi dari modul receiver masih menunjuk ke arah datangnya pantulan yaitu modul sensor 4.
3
R
2
4 1
90.0°
75 cm
45.0°
5
120 cm
90 cm
1 2
3 5 4 7
8
Gambar 4.15 Posisi pengujian keempat
Pada gambar 4.16 untuk pengujian kelima, posisi modul receiver ditempatkan sejajar dengan modul transmitter. Modul receiver ditempatkan pada titik 1 dan meskipun tidak ada penghalang atau sekat, namun pemanggilan dari modul transmitter tetap diarahkan ke dinding yang mengakibatkan orientasi modul receiver tetap mengarah ke arah datang pemantulan. Dengan keadaan seperti itu, modul sensor 6 tetap mendapat tegangan yang lebih besar daripada modul sensor nomor 5. Dari tabel 4.10 didapatkan tegangan pada modul sensor 6 adalah 3,43 volt dan modul sensor disebelahnya mendapat tegangan dibawah tegangan modul sensor 6. Selain itu, modul-modul sensor yang tidak menerima gelombang ultrasonik dari modul transmitter akan mendapat tegangan awal yang
point seperti pada pengujian keenam, maka orientasi akan menjadi benar seperti diperlihatkan pada gambar 4.17. Pada jarak antara modul transmitter dan modul receiver semakin dekat, dari keseluruhan gambar 4.12 sampai 4.17, dapat dilihat bahwa modul receiver tidak dapat menunjukkan orientasi yang benar bila terhalang dengan dinding atau sekat.
R 3
2
4 1
5
120 cm
90 cm
45.0°
75 cm
1 2
3 5 4 7
8
Gambar 4.16 Posisi pengujian kelima
Dari urutan penjelasan sebelumnya, kesalahan yang terjadi pada sistem memang tidak dapat dihindari karena karakteristik gelombang ultrasonik yang telah dijelaskan sebelumnya. Namun, kelemahan tersebut akan dapat menjadi keunggulan apabila sistem alat bantu ultrasonik sudah diterapkan pada mobile robot. Mobile robot akan dapat mengetahui arah pemanggilnya berdasarkan pemantulan-pemantulan tersebut. Dengan begitu mobile robot akan semakin pintar dalam mengetahui posisi pemanggilnya walaupun ditempatkan dalam ruangan yang bersekat.
R 3
4 1
5
120 cm
75 cm
1 2
3 4 6 7
8
Gambar 4.17 Posisi pengujian keenam
4.4.5 Pengujian Pada ADC
Pada perancangan perangkat keras ADC, digunakan timer NE555 dengan frekuensi yang dihasilkan sebesar 500 KHz. Timer tersebut digunakan untuk menentukan periode clock yang digunakan untuk proses konversi data analog ke digital. Untuk mendapat nilai periode ini didapat dengan persamaan (4-1) berikut :
T = 1f (4-1)
Lambang T menunjukkan periode (satuan = detik) dan f adalah frekuensi (satuan
= Hertz). Dengan frekuensi sebesar 500 KHz, maka didapatkan nilai T pada persamaan (4-2) berikut :
Hz s
T f 2µ
10 . 500
1 1
3 =
=
= (4-2)
memperlihatkan periode sebesar 2 µs.
2 µs
Gambar 4.18 Periode bernilai 2 µs
Untuk mengkonversi nilai analog menjadi nilai digital, ADC memerlukan 3 bit address untuk menentukan input kanal analog yang akan diambil nilai analognya. Kemudian diberikan sinyal ALE (Address Latch Enable) dan SOC (Start of Conversion) kepada ADC untuk melakukan proses konversi. Proses konversi ini berakhir dengan ditandai oleh sinyal EOC (End of Conversion).
Proses konversi yang baru akan terjadi bila diberikan sinyal SOC berikutnya.
Pengujian pada ADC dilakukan dengan menghitung waktu konversi dari teori dan dari pengujian dengan osiloskop. Berikut akan dilakukan pengujian waktu konversi dari teori. Secara keseluruhan untuk satu kali proses konversi pada ADC memerlukan waktu 103 µs. Nilai ini didapat dari penjelasan yang ada pada data sheet ADC 0809 yang bisa dilihat pada lampiran L5 halaman 4.
Pada timing diagram, sinyal ALE dan SOC membutuhkan periode 1,5 clock. Hal ini berarti waktu yang dibutuhkan sebesar 1,5 x 2 µs = 3 µs. Jadi waktu keseluruhan yang dibutuhkan ADC untuk proses konversi dari pengiriman 3 bit address sampai proses konversi tersebut selesai berjumlah 103 µs. Proses konversi pada ADC ini dilakukan sebanyak 8 kali karena ADC ini mempunyai 8 kanal input analog. Input analog pada ADC dikonversi seluruhnya untuk
Seperti yang sudah dijelaskan sebelumnya, proses konversi yang terjadi di dalam ADC itu sendiri membutuhkan waktu selama 103 µs. Kemudian setelah hasil output digitalnya sudah ada, maka hasil output digitalnya akan disimpan ke dalam mikrokontroler dan selanjutnya akan disimpan ke dalam suatu variabel.
Proses penyimpanan ke dalam suatu variabel pada mikrokontroler ini membutuhkan waktu 48,6 µs. Maka didapatkan total waktu yang dibutuhkan untuk mengkonversi sebuah input analog pada ADC secara perhitungan ialah sebesar 151,6 µs.
Pengujian dengan osiloskop dilakukan dengan menguji waktu dimulainya sinyal SOC sampai dengan sinyal SOC berikutnya. Dengan menggunakan osiloskop dapat dilihat sinyal keluaran SOC pada ADC yang dijelaskan pada gambar 4.19. Konversi data pada ADC dimulai pada saat perubahan dari kondisi logika high ke kondisi logika low. Pada gambar 4.19 ,yang merupakan gambaran yang didapat dari osiloskop, terlihat bahwa terjadi selang waktu sebesar ±330 µs antara sinyal SOC pertama dengan sinyal SOC berikutnya. Jadi, ADC membutuhkan waktu sebesar ±330 µs untuk mengkonversi sebuah input analog menjadi output digital. Pada perancangan sistem setelah ADC melakukan konversi ke output digital, maka output digital tersebut akan dibaca oleh mikrokontroler dan kemudian akan disimpan ke dalam sebuah variabel yang sesuai dengan nilai addressnya. Kemudian setelah mikrokontroler sudah menyimpan nilai digital tersebut ke dalam suatu variabel, maka mikrokontroler akan mengirim kembali sinyal SOC ke ADC untuk mengkonversi input analog
waktu yang terjadi antara sinyal SOC dengan sinyal SOC berikutnya tersebut sudah termasuk proses penyimpanan nilai variabel pada mikrokontroler. Jadi, nilai waktu tersebut didapat tidak hanya dari proses konversi di dalam ADC itu sendiri melainkan sudah termasuk perhitungan waktu penyimpanan variabel pada mikrokontroler.
330us
frekuensi amplitudo
Gambar 4.19 Waktu konversi pada ADC
Namun pada kenyataannya nilai perhitungan dengan osiloskop tidak sesuai dengan hasil yang didapat dari perhitungan secara teori. Perbedaan nilai waktu antara perhitungan secara teori (151,6 µs) dengan perhitungan dengan osiloskop (±330 µs) disebabkan karena proses penyimpanan data digital hasil konversi ke mikrokontroler menggunakan tehnik scanning. Oleh karena proses penyimpanan data menggunakan tehnik scanning, tehnik yang memeriksa kanal tempat penyimpanan data dari awal sampai akhir, maka dapat mengakibatkan terjadinya waktu yang tidak konstan dari keseluruhan proses konversi pengujian dengan osiloskop (lihat gambar 4.19).
Pada perancangan sistem, ADC ini akan terus mengkonversi sinyal input analog walaupun tidak ada gelombang ultrasonik yang diterima oleh receiver ultrasonik. Perbedaan nilai waktu konversi ini didapat dengan melihat kondisi
konversi dari pengujian sistem dan dari pengujian secara teori yang dibawah 1 detik, maka waktu penekanan tombol pada modul transmitter dapat dilakukan secara sesaat.
4.4.6 Pengujian Pada Motor Stepper
Pengujian yang dilakukan pada motor stepper, bertujuan untuk menghitung waktu perputaran motor stepper secara hardware dan software dalam responnya terhadap pemanggilan dalam 1 putaran atau 1 revolusi. Apabila waktu dalam 1 putaran telah diketahui, maka dapat diketahui kecepatan dalam 1 putaran.
Secara software, waktu yang dibutuhkan oleh motor stepper untuk bergerak setiap satu step-nya adalah 5,57 milidetik. Nilai ini didapat dengan menghitung waktu yang dibutuhkan setiap baris instruksi di dalam modul untuk pergerakan motor stepper pada program utama. Modul pergerakan motor stepper pada program utama terdapat pada modul “mtrmov” yang bisa dilihat pada lampiran L1 tentang listing program utama. Semua instruksi pada program utama memiliki waktu eksekusi yang berbeda-beda. Perbedaan waktu eksekusi ini bisa dilihat pada tabel 4.11.
Pada perancangan hardware, digunakan kristal osilator sebesar 11,0945 MHz dan untuk mencari nilai mesin cycle-nya digunakan rumus pada persamaan (4-3) berikut ini.
Tabel 4.11 Waktu eksekusi setiap instruksi
Instruksi Waktu eksekusi
MOV 1 µs
ADD 1 µs
SUBB 1 µs
MUL 4 µs
DIV 4 µs
INC 1 µs
ORL A,<byte> 1 µs ORL <byte>,#data 2 µs ANL A,<byte> 1 µs ANL<byte>,#data 2 µs
SETB 1 µs
CLR 1 µs
JC 1 µs
JNC 1 µs
JB 1 µs
JNB 1 µs
JMP 2 µs
CALL 2 µs
RET 2 µs
RETI 2 µs
NOP 1 µs
DJNZ 2 µs
CJNE 2 µs
Dalam 1 mesin cycle terdiri dari 12 periode osilasi dan 1 mesin cycle setara dengan 1,081 µs. Sedangkan pada tabel 4.11, nilai 1 µs itu didapat jika menggunakan kristal osilator 12 MHz. Maka nilai 1 mesin cycle yang digunakan pada perhitungan selanjutnya adalah 1,081 µs.
Jadi untuk mengetahui waktu yang dibutuhkan oleh motor stepper agar dapat bergerak sebanyak 1 step, bisa didapatkan dengan menghitung waktu
Mtrmov:
Setb enb297 ;1,081 µs
Mov b,#2d ;1,081 µs
Mov a,prgk ;1,081 µs
Mul ab ;4,324 µs
Mov prgk,a ;1,081 µs
Mov R6,prgk ;1,081 µs
Mov a,prgk ;1,081 µs
Cjne a,#00,blk1 ;2,162 µs
Ajmp klr ;2,162 µs
Blk1:
Setb clkpls ;1,081 µs
Mov r3,#5 ;1,081 µs
Lcall dly1 ;2,162 µs
;2774,927 µs => total waktu dari modul dly1
Clr clkpls ;1,081 µs
Mov r3,#5 ;1,081 µs
Lcall dly1 ;2,162 µs
;2774,927 µs => total waktu dari modul dly1
Djnz R6,blk1 ;2,162 µs
--- +
5575,798 µs
Dly1:
Mov R4,#0ffh ; 1,081 µs
Djnz R4,$ ;2,162 µs x 0FFh = 551,31 µs
Djnz r3,dly1 ; 2,162 µs
--- +
554,553 µs
554,553 µs x 5 = 2772,765 µs => karena modul dly1 diulang sebanyak 5x.
Ret ;2,162 µs
2772,765 µs + 2,162 µs = 2774,927 µs. Sedangkan untuk total waktu keseluruhan yang ditempuh oleh motor stepper untuk bergerak sebanyak satu step ialah sebesar 5575,798 µs atau 5,57msstep.
Untuk berputar sebesar 180o, motor stepper harus berputar sebesar 200 step. Sedangkan posisi antar receiver ultrasonik membentuk sudut 45o. Jadi untuk berputar dari satu posisi receiver ultrasonik ke posisi receiver ultrasonik berikutnya dibutuhkan 50 step. Nilai 50 step ini didapat dari karakteristik motor itu sendiri yang menggunakan half step. Maka, waktu yang digunakan motor stepper untuk berputar sebesar 180o ( secara software ) adalah 5,57 x 200 = 1,11 detik.
Secara hardware, dilakukan serangkaian percobaan untuk pengambilan data dari waktu perputaran motor stepper. Data untuk perputaran motor stepper diambil sebanyak 20 kali dan kemudian dicari rata-ratanya. Tabel 4.12 menunjukkan data untuk perputaran motor stepper.
Dari data pada tabel 4.12 didapatkan waktu rata-rata yang dibutuhkan motor stepper agar dapat berputar sebesar 180o atau 200 step adalah 1,33 detik.
Sehingga waktu yang dibutuhkan oleh motor stepper untuk berputar sebesar satu step adalah t = 1,33 : 200 = 6,65 milidetik.
Dari analisa secara software dan secara hardware maka didapatkan selisih nilai waktu pergerakan motor stepper untuk satu step-nya. Nilai untuk satu step secara software adalah 5,57 milidetik dan nilai untuk satu step secara hardware adalah 6,65 milidetik. Nilai selisih sebesar 1,08 milidetik terjadi
hardware yang tidak selalu tepat. Untuk itu perhitungan waktu pergerakan motor stepper secara software digunakan hanya untuk pembuktian dari perhitungan waktu secara hardware, dimana perhitungan waktu antara software dengan perhitungan waktu hardware tidak berbeda jauh nilainya dalam satuan milidetik.
Tabel 4.12 Data perputaran motor stepper
Percobaan Waktu / 180o (satuan detik)
1 1.16 2 1.47 3 1.31 4 1.4 5 1.14 6 1.32 7 1.16 8 1.42 9 1.47 10 1.35 11 1.41 12 1.46 13 1.32 14 1.15 15 1.34 16 1.39 17 1.37 18 1.28 19 1.25 20 1.45 Rata-rata 1.33
Dari nilai waktu yang telah diketahui, maka dapat dicari nilai kecepatan untuk 1 putaran ( 1 revolusi ) dengan rumus:
1 revolusi = 360o
Dari persamaan (4-5) ditunjukkan nilai kecepatan putar motor stepper dalam 1 putaran adalah 0,376 rev/s.
4.4.7 Pengujian Tingkat Kesalahan Pada Sistem
Tingkat kesalahan atau error rate pada alat bantu ultrasonik berbeda-beda untuk setiap kondisi. Kondisi tersebut misalnya adalah jarak dan nilai delay pada motor stepper. Penjelasan tentang kondisi jarak dan cara penembakan dapat dilihat pada bab 4.4.1 tentang pengujian modul receiver. Pada bab tersebut telah didapatkan hasil mengenai jarak optimum dari alat bantu ultrasonik yaitu dari 0 sampai dengan 300 cm. Pada bab ini akan dijelaskan pengaruh penggunaan nilai delay untuk motor stepper terhadap error rate pada alat bantu ultrasonik.
Suatu kesalahan terjadi pada alat bantu ultrasonik pada saat motor stepper tidak tepat menunjukkan orientasi dari modul transmitter secara langsung. Motor stepper digerakkan melalui pulsa clock yang dibangkitkan dari mikrokontroler.
Apabila mikrokontroler memberikan satu pulsa clock, maka motor stepper akan bergerak sebanyak satu step. Kecepatan putar dari pergerakan motor stepper ditentukan dari nilai delay pada setiap pulsa clocknya. Apabila nilai delay yang diberikan terlalu kecil atau terlalu besar, maka akan dilihat dampaknya pada pergerakan motor stepper dalam menunjukkan orientasinya. Pengujian bertujuan untuk mencari nilai delay yang tepat untuk pergerakan dari motor stepper agar error rate yang dihasilkan kecil dan kecepatan putarnya juga sesuai.
Kemudian pada saat melakukan pemanggilan tersebut, akan diamati berapa banyak error yang terjadi dalam penunjukan arah orientasi pada motor stepper.
Seharusnya, apabila modul transmitter berada pada posisi yang tidak berubah, maka motor stepper tidak akan bergerak menunjuk ke arah lain. Motor stepper akan terus menunjuk ke arah modul transmitter tanpa bergerak sedikitpun.
Pengujian dilakukan dengan jarak 40 cm dan suhu ruangan 25o Celcius. Berikut pada gambar 4.20 adalah ilustrasi pengambilan data pada pengujian.
1
7
5
4 3 8 2
6
Transmiter Ultrasonik
Receiver Ultrasonik
Dimana:
: Sensor Ultrasonik
: Orientasi Salah
: Orientasi Benar
Gambar 4.20 Ilustrasi pengambilan data
Tabel 4.13 memperlihatkan hasil pengambilan data dengan nilai delay yang berbeda-beda.
Error yang RECEIVER ULTRASONIK Total Error Kinerja Respon
terjadi 1 2 3 4 5 6 7 8 Error Rate Sistem Motor
000Fh Motor tidak jalan sama sekali - - - Tidak ada D 001Fh Motor tidak jalan sempurna - - - Tidak ada
E 003Fh 15 9 11 6 8 7 4 10 70 8,75% 91,25%
Cepat sekali
L 007Fh 6 3 7 5 4 8 8 9 50 6,25% 93,75% Cepat A 00FFh 2 3 2 3 6 7 8 6 37 4,63% 95,37% Cukup
Y 01FEh 3 5 4 3 5 3 4 2 29 3,63% 96,37%
Sedikit lambat 03FCh 2 3 1 2 3 3 1 2 17 2,13% 97,87% Lambat
07F8h 1 2 1 1 2 2 1 2 12 1,5& 98,5%
Lambat sekali
Setelah dilakukan pengujian yang hasilnya dilihat pada tabel 4.13, maka dapat dilakukan analisa. Jika nilai delay yang diberikan pada program di mikrokontroler adalah kecil sekali atau sekitar 0Fh, maka motor stepper tidak bergerak sama sekali. Hal ini menandakan bahwa nilai delay pada pulsa clock yang dibangkitkan oleh mikrokontroler terlalu cepat sehingga mengakibatkan motor stepper tidak bisa menerima pulsa clock yang sangat cepat itu. Pengujian selanjutnya, dengan menambah nilai delay menjadi 01Fh. Dengan nilai delay ini, motor stepper sudah dapat bergerak tetapi orientasinya belum benar sama sekali.
Hal ini dikarenakan karena pulsa clock yang dibangkitkan dari mikrokontroler masih terlalu cepat bagi motor stepper tersebut untuk bergerak.
Berikutnya nilai delaynya dinaikkan lagi menjadi 03Fh. Dengan nilai delay ini maka pergerakan dari motor stepper akan sangat cepat sekali pada saat merespon gelombang ultrasonik yang dikirim oleh modul transmitter. Nilai delay 0FFh memberikan error rate lebih kecil daripada nilai delay sebelumnya. Namun dengan nilai delay seperti 03FCh memberikan error rate yang lebih kecil
karena itu, nilai delay yang digunakan adalah nilai delay yang memiliki error rate kecil dan kecepatan yang cukup yaitu nilai delay 0FFh.