Abstrak — Penggunaan motor DC pada industri banyak kita temui. Hal ini dikarenakan pengaturan posisinya yang cukup mudah dan murah. Banyak metode pengaturan posisi telah digunakan mulai dari pengontrolan menggunakan kontroler PID sampai dengan penggunaan kontroler Sliding Mode.
Pada proyek akhir ini digunakan metode Sliding Mode Control untuk mengontrol posisi dari motor DC. SMC sangat cocok digunakan untuk kendali posisi motor DC. SMC merupakan kendali umpan balik pensaklaran frekuensi tinggi yang memiliki sifat kokoh. Kendali SMC dipilih karena kekokohan yang dimiliki sistem kendali ini diharapkan dapat mengatasi permasalahan perubahan parameter dari motor DC akibat pembebanan. Perubahan parameter dapat mengakibatkan perubahan respon yang cukup signifikan. Namun kekurangan yang dimiliki oleh kendali SMC adalah timbulnya fenomena chattering yang berpengaruh terhadap stabilitas sistem kendali.
Metode SMC digunakan untuk mengoptimasi pemilihan penguat pensaklaran ( switching gain ) dan permukaan luncur ( sliding surface ) secara simultan. Pada proyek akhir ini diharapkan hasil output yang diperoleh dari sistem sesuai dengan yang diharapkan ( sesuai input ).
Kata Kunci : Posisi Motor Servo, Sliding Mode Control .
I. PENDAHULUAN
Motor DC banyak digunakan di industri karena kemudahan dalam penggunaan dan pengaturan posisinya. Oleh karena itu banyak dilakukan penelitian akan pengaturan posisi pada motor DC. Salah satunya pengaturan posisi menggunakan kontroler SMC. SMC adalah kendali umpan balik pensaklaran frekuensi tinggi yang dapat digunakan untuk mengendalikan sistem linear maupun nonlinear. Dengan adanya kemajuan teknologi semikonduktor yang
memungkinkan penggunaan penyaklaran PWM dengan kecepatan tinggi maka pengaplikasian SMC mulai banyak dilakukan.
Kendali yang dilakukan pada SMC bertujuan untuk membatasi gerak trajektori status agar tetap berada di kondisi yang diinginkan oleh perancangnya. Sehingga secara garis besar kendali yang dilakukan pada SMC dapat dibagi menjadi ke dalam dua proses, yaitu pembawaan trajektori status menuju ke keadaan yang diinginkan dan menjaga agar trajektori status itu tetap berada disana untuk sisa waktu berikutnya. Pada SMC dikenal istilah permukaan luncur yaitu suatu batasan yang dibuat oleh perancang dimana nantinya trajektori status tersebut akan dipaksa untuk menuju ke permukaan luncur dan meluncur (sliding) menuju ke kondisi yang diinginkan. Pada saat status dari sistem sudah berada di permukaan luncur maka sistem menjadi kebal dari gangguan dari luar maupun perubahan parameter yang terjadi pada sistem. Sehingga diharapkan trajektori status dari sistem dapat dengan cepat menuju permukaan luncur agar sistem menjadi tidak peka akan perubahan parameter maupun gangguan dari luar.
Perubahan beban pada motor DC dapat menyebabkan perubahan parameter dari motor. Perubahan parameter dari motor menyebabkan perubahan respon yang cukup signifikan. Metode yang umum dilakukan adalah dengan melakukan penalaan parameter kontroler secara kontinyu. Hal ini tentu saja akan sangat merepotkan karena harus melakukan penalaan parameter kontroler setiap terjadi perubahan beban. Untuk itu diperlukan suatu kontroler yang memiliki sifat kokoh terhadap gangguan maupun perubahan parameter.
KONTROL POSISI MOTOR DC DENGAN
SLIDING MODE CONTROL
Agandi Haryo Widagdo
1, Santi Anggraeni, S.T., M.T.
2, Alrijadjis, Dipl. Eng., M.T.,
2 1Penulis, Mahasiswa Jurusan Teknik Elektronika PENS - ITS 2Dosen Pembimbing, Staf Pengajar di Jurusan Teknik Elektronika PENS - ITS
Politeknik Elektronika Negeri Surabaya
Electronics Engineering Polytechnic Institute of Surabaya Institut Teknologi Sepuluh Nopember Surabaya Kampus ITS Sukolilo, Surabaya 60111, INDONESIA
Tel: +62 (31) 594 7280; Fax: +62 (31) 594 6114 email : [email protected]
II. DASAR TEORI
A. Sliding Mode Controller
Sliding Mode Controller (SMC) merupakan sebuah kendali umpan balik pensaklaran berkecepatan tinggi (high speed switching feedback control) yang efektif dan kokoh dalam mengendalikan sistem linear maupun non-linear. Sistem kendali ini kokoh karena menyediakan sebuah metoda perancangan sistem yang tidak peka terhadap ketidakpastian parameter lingkungan dan gangguan dari luar.
SMC adalah suatu metodologi pengaturan yang mampu mengatasi perubahan yang mengganggu pada sistem, tanpa menyebabkan gangguan pada performa sistem itu sendiri. SMC menyediakan pendekatan dengan kemungkinan pemodelan yang sangat luas. Struktur SMC terdiri dari bagian utamam yang berfungsi memperbaiki sinyal error dengan mengarahkan sinyal tersebut pada sebuah lintasan yang diinginkan dan bagian tambahan yang berfungsi untuk mempertahankan sinyal.
Pada prinsipnya, SMC menggunakan sebuah hukum kendali pensaklaran berkecepatan tinggi (high-speed switching) untuk membawa trajektori status dari sistem linear/non-linear ke dalam sebuah permukaan (hyperplane) tertentu dalam ruang status (disebut permukaan luncur/”sliding surface”), kemudian trajektori status tersebut dipelihara agar tetap meluncur pada permukaan tersebut. Proses pemeliharaan trajektori status pada permukaan luncur mengakibatkan terjadinya osilasi pada permukaan luncur. Osilasi ini sering disebut dengan “chattering”. Fenomena “chattering” pada permukaan luncur akan berdampak pada stabilitas dari sistem kendali.
Pada SMC, waktu yang dibutuhkan oleh status dalam mencapai permukaan luncur akan berdampak terhadap kecepatan tanggapan sistem terhadap waktu. Waktu yang dibutuhkan oleh status untuk mencapai permukaan luncur sering disebut dengan “hitting time”. Salah satu keuntungan dari SMC adalah ketika sistem mengenai permukaan luncur, maka sistem tersebut tidak akan peka terhadap ketidakpastian parameter lingkungan dan gangguan dari luar. Oleh karena itu, fokus penelitian ini adalah bagaimana mengaplikasikan kendali SMC untuk mengatur posisi sudut motor DC.
Tujuan utama SMC adalah membuat respon mengikuti trajektori yang diinginkan. Hal ini dapat dilakukan dengan membandingkan state aktual ( ) dengan state yang diinginkan ( d). Trayektori tersebut dikenal sebagai sliding surface. Pada sliding surface, fungsi gangguan adalah jarak dari sinyal terukur terhadap sliding surface, yang dinotasikan sebagai
=
- d.. Keadaan dimana sistem telah berada di sliding surface disebut sebagai keadaan sliding mode, dimana pada keadaan tersebut nilai
= 0.
SMC pada umumnya diterapkan pada sistem non-linear. Sebuah sistem linear SISO direpresentasikan dengan “persamaan (2.1) dan (2.2) yang merupakan persamaan state space dari sistem.
=
A+
B ...(2.1) Dengan : 0 1 0 ... 0 0 0 0 0 1 ... 0 0 0 A = . . . . B = . . . . . . 0 0 0 ... 0 1 0 -an -an-1 -an-2 ... -a2 -a1 1 . ....(2.2) Dimana :(t) = [
1...
n]
Tmerupakan sebuah vector status berdimensi-n,
A merupakan sebuah matrik sistem n x n, dan B adalah sebuah vektor input berdimensi-n.
Secara umum kendali pada SMC dapat dipisah menjadi dua bagian input kendali yaitu ueq dan un.. Sehingga persamaan input kendali SMC dapat ditulis :
(t ) =
eq+
n...(2.3)dimana :
eq =input kendali agar trajektori status ke permukaan
luncur.
n = input kendali untuk menjaga agar trajektori status
tetap berada pada permukaan luncur.
B. Mikrokontroler Atmega 8.
Mikrokontroller Pin - pin pada ATmega8 dengan kemasan 28-pin PDIP (dual inline package) ditunjukkan oleh gambar 2.2 Kemasan pin tersebut terdiri dari 3 Port yaitu Port B, Port C,Port D yang masing masing Port terdiri dari 8 buah pin. Selain itu juga terdapat RESET, VCC, GND 2 buah, VCC, AVCC, XTAL1, XTAL2 dan AREF.
Konfigurasi pin pada Atmega8 sebagai berikut : VCC : Tegangan supply
GND : ground
Port B (PB7..PB0) : port I/O 8 bit dengan resistor pull-up internal tiap pin, buffer portB mempunyai kapasitas menyerap (sink) dan mencatu (sorce). Khusus PB6 dapat digunakan sebagai input program (inverting oscillator amplifier) dan input ke rangkaian clock software programmer/downloader) yang digunakan untuk memilih sumber clock. Khusus PB7 dapat digunakan output program (output inverting oscillator amplifier) bergantung pada pengaturan fuse bit yang digunakan untuk memilih sumber clock. Jika sumber clock yang dipilih dari oscillator internal, PB7 dan PB6 dapat digunakan sebagai I/O atau jika
menggunakan Asyncronous
Timer/counter2 makaPB6 dan PB7 (TOSC2 dan TOSC1) digunakan untuk saluran input counter.
Port C (PC5..PC0) :Port I/O 7 bit ([PC6],PC5…PC0) dengan resistor pull-up internal tiap pin. Buffer portC mempunyai kapasitas menyerap (sink) dan mencatu (sorce).
Reset/PC6 : Jika fuse bit RSTDISBL di “programmed”, PC6 digunakan sebagai pin I/O. Jika fuse bit “unprogamed”, PC6 digunakan sebagai pin RESET (aktif low ).
Port D (PD7..PD0) : Port I/O 8-bit dengan resistor pull-up internal tiap. Buffer portC mempunyai kapasitas menyerap (sink) dan mencatu (sorce).
Avcc : Avcc adalah pin tegangan catu daya untuk A/D converter, PC3..PC0 dan ADC(7..6). Avcc harus dihubungkan ke Vcc, walaupun ADC tidak digunakan. Jika ADC digunakan, maka Avcc harus dihubungkan ke Vcc melalui low pass filter.
Catatan: PC5, PC4 gunakan catu daya Vcc digital.
AREF : untuk pin tegangan referensi analog ADC.
ADC7..6(TQPF, QFN/MLF): Hanya ada pada kemasan TQPF dan QFN/MLF, ADC7..6 digunakan untuk pin ADC
C. Motor Servo
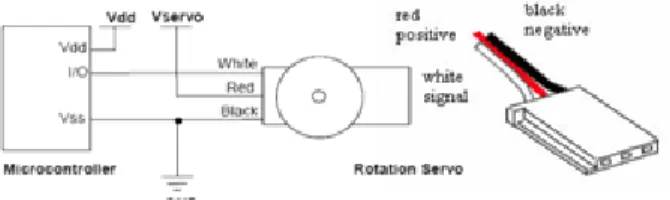
Motor servo mampu bekerja dua arah (CW dan CCW) dimana arah dan sudut pergerakan rotornya dapat dikendalikan hanya dengan memberikan pengaturan duty cycle sinyal PWM pada bagian pin kontrolnya. Berikut ini pinout dari motor servo :
Gambar 2.3 . Pin out dari motor servo
Kecepatan motor servo termasuk dalam kategori lambat, kelebihan yang dimiliki adalah torsi dan presisi yang handal. Dapat kita ketahui bahwa sebuah motor servo memiliki spesifikasi sebagai berikut :
1. 3 jalur kabel : vcc, ground, control data
2. Sinyal kontrol mengendalikan putaran dan posisi 3. Opersaional dari servo motor dikendalikan oleh sebuah pulsa brefrekuensi 50 Hz, dimana lebar pulsa antara 1,3 – 1,7 ms.
4. Konstruksi di dalamnya meliputi internal gear, potensiometer dan feedback control.
D. Komunikasi Serial
RS merupakan kependekan dari Rcommended Standard yang ditetapkan oleh Electronics Industries Association (EIA). Standar sinyal komunikasi yang banyak digunakan adalah standar RS232 yang dikembangkan oleh Electronic Industry Association and The Telecommunications Industry Association (EIA/TIA) yang pertama kali dipublikasikan pada tahun 1962. Standar Komunikasi Kabel RS (Standard) yang dikeluarkan EIA :
RS-232 -> single ended
RS-422 -> differential, multi-drop, broad-band
RS-485 -> differential, multi-drop, MIMO
E. USB to Serial Converter
Penggunaan serial USB to 232 adalah untuk komunikaasi antara PC dengan minimum sistem. Komunikasi serial merupakan komunikasi data dengan pengiriman data secara satu per satu dengan menggunakan satu jalur kabel
data. Sehingga komunikasi serial hanya menggunakan 2 kabel data yaitu kabel data untuk pengiriman yang disebut transmit (Tx) dan kabel data penerimaan yang disebut receive (Rx). Kelebihan dari komunikasi serial adalah jarak pengiriman dan penerimaan dapat dilakukan dalam jarak yang cukup jauh dibandingan dengan komunikasi parallel tetapi kekurangannya adalah kecepatan lebih lambat daripada komunikasi parallel.
Gambar2.4.Converter USB to 232 serial
Pada komputer, biasanya terdapat sebuah port untuk komunikasi serial. Beberapa contoh penerapan komunikasi serial ialah mouse, scanner dan data akusisi data yang terhubung ke port serial COM1/COM2. Bagian yang terpenting dari komunikasi serial adalah konektor DB9 dan RS 232. DB9 adalah konektor yang digunakan untuk menghubungkan hardware dengan komputer. Konektor DB9 dapat dilihat pada gambar 15.1 dibawah ini.
Gambar 2.5. pin konektor DB9
III. PERANCANGANSISTEM
Pada tahap ini dilakukan perancangan sistem untuk mempersiapkan perangkat keras dan perangkat lunak yang akan dibuat.
ϴ input error u ϴoutput
Gambar 3.1 Blok Diagram Konfigurasi Sistem
A. Perancangan dan Pembuatan Mekanik Robot
Bahan yang digunakan pada pembuatan mekanik sistem ini adalah berupa papan aklirik. Papan ini berfungsi sebagai wadah penunjuk nilai sudut motor DC servo.
Gambar 3.2 di bawah ini adalah rancangan mekanik sistem kontrol motor DC dengan SMC.
Gambar 3.2 Mekanik Sistem Keterangan gambar:
1) Papan modul
2) Jarum penunjuk nilai sudut. 3) Minimum sistem
4) Motor DC servo
B. Pembuatan Perangkat Keras
Pada tahap pembuatan perangkat keras ini terdiri dari sebuah rangkaian minimum sistem mikrokontroler ATMega 8 serta rangkaian suply motor DC servo untuk memisah dengan rangkaian minimum sistem.
Pada rangakaian minsys ATMega8 pada gambar 3.3 di bawah ini menggunakan kristal sebagai osilator sebesar 11.0952 MHz.
Gambar 3.3 Minimum Sistem AT Mega8
Pada mikrokontroler AT Mega 8 terdapat 3 buah port I/O 8 bit, yaitu port B, port C dan port D. Tabel perencanaan input output dapat dilihat pada tabel 3.1
SMC Motor DC
Servo
Tabel 3.1 Perencanaan input-output
DEVICE PORT KETERANGAN
Pin ADC ADC PORTC.0 input
Servo PORTB.1 output
C. Pembuatan Perangkat Lunak
Pada bagian ini akan dilakukan pemodelan untuk mendapatkan model matematik dari motor DC servo yang diperlukan dalam simulasi serta melakukan pengujian secara open loop terhadap model motor DC servo yang telah didapatkan.
Motor DC servo bekerja berdasarkan prinsip gaya elektromagnetik sehingga apabila motor tersebut diberi catu daya, arus akan mengalir ke dalam motor kemudian menghasilkan,torsi putar yang sebanding dengan arus tersebut. Pemodelan Rangkaian internal Motor DC secara sederhana dan analisisnya adalah sebagai berikut :
Gambar 3.4 Permodelan motor DC
Persamaan torsi yang dibangkitkan oleh Motor DC dapat didekati secara linear menurut persamaan berikut ini :
T = Kai ...(3.1) Dimana Ka dalah konstanta jangkar motor yang
bergantung pada banyaknya lilitan pada jangkar, jumlah kutub medan, tipe belitan dan penampang jangkarnya. Adapun besarnyam tegangan ggl induksi lawan yang dibangkitkan motor ketika berputar adalah sebanding dengan konstanta motor Kb dan kecepatan
sudut putaran motor q & atau turunan pertama dari posisi sudut motor (q ).
e = Kb.Ȯ ...(3.2) Dengan menggunakan hukum newton, bahwa persamaan torsi yang terkait dengan momen inersia dan rasio redaman dari motor adalah:
T = JӪ + Ȯ ...(3.3) dari persamaan (6) dan (8) diperoleh:
i =
...(3.4)
V = iR +L
...(3.5)
V= iR + L + KbȮ...(3.6) Dengan me-laplace-kan persamaan (3.4) dan (3.5) dan mensubstitusikannya, maka diperoleh fungsi transfer antara posisi sudut motor q terhadap tegangan armature V dimana Ka = Kb.
=
...(3.7) Identifikasi plant ditujukan untuk mendapatkan model matematis yaitu menyatakan hubungan antara input dan output berupa fungsi alih yang digunakan untuk proses perancangan kontroler nantinya.Persamaan ( 3.8) memperlihatkan model matematis hubungan antara input dan output.
=
...(3.8)
Untuk jenis plant yang dibahas berupa motor DC servo sistem orde dua. Orde sistem menentukan jenis kontroler yang akan dipakai dan mencari nilai parameter kontroler untuk hasil respon yang diinginkan.
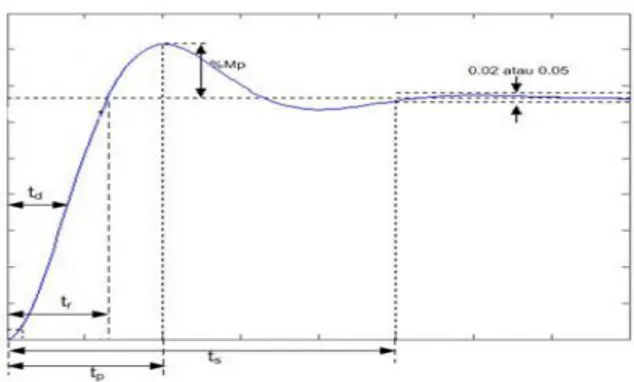
Persamaan (3.9) memperlihatkan bentuk umum fungsi alih dari sistem orde dua.
...(3.9) Dimana : K = Gain overall ξ = Rasio redaman ω= frekuensi
Karakteristik penting lainnya adalah nilai dari kemiringan kurva keluaran sistem pada saat t = 0 adalah 1/τ. Dapat dilihat pada Gambar (3.10) bahwa setelah kurva keluaran sistem telah melewati nilai t = τ maka nilai kemiringan kurva menurun begitu cepat.
Pada sistem/plant ini diperoleh nilai tranfer function dalam bentuk model orde dua. Persamaan (3.10) berikut menunjukkan nilai transfer function.
TF =
...(3.10) Dalam sistem kendali, State space merupakan metode analisis untuk sebuah sistem kendali yang kompleks. Analisa state space dapat diterapkan pada pada sutau sistem Single Input-Single Output atau Multi Input-Multi Output , yang linear, parameter konstan ( time invariant ) maupun parammeter berubah. Secara umum persamaan state space dituliskan sebagai berikut.
=
A+
B ...(3.11)=
C+
D ...(3.12) dimana := matriks turunan dari matriks A = matriks status B = matriks masukan C = matriks status D = matriks status = matriks output = sinyal masukan
Berdasarkan data yang diberikan maka dapat dituliskan model matematika dari motor DC servo menggunakan persamaan state space menjadi :
-9,796 -19,73 1
=
+
1 0 0
= -1,183 20,04
Pada perancangan SMC dapat kita bagi kedalam dua bagian, yaitu perancangan permukaan luncur yang fungsinya untuk membatasi pergerakan trajektori agar selalu berada disekitar permukaan luncur tersebut. Kemudian selanjutnya dilakukan perancangan sinyal kendali yang fungsinya untuk memaksa trajektori status untuk menuju permukaan luncur dan setelahnya memelihara agar trajektori status tersebut selalu berada disana.
Perancangan permukaan luncur menjadi hal yang terpenting dalam desain kontroler SMC. Karena pada perancangan permukaan luncur inilah diharapkan trajektori status dapat mengikuti tujuan yangdiharapakan.
Tujuan dari pengendalian motor DC servo ini adalah membuat keluaran mengikuti referensi yang
diberikan dan perubahan kesalahan penjejakan terhadap waktu sama dengan nol. Sliding surface memiliki syarat yaitu :
= 0
...(3.13) dengan= (
+ λ)
n-1...(3.14) =
+ λ
...(3.15) dan= -
d ...(3.16)sehingga dari subtitusi persamaan (3.14) dan (3.15) diperoleh.
= +
d+ λ
...(3.17)= -
d+ λ
...(3.18)dimana :
adalah vektor error tracking
adalah vektor koefisien sliding surface d adalah input step
Secara umum kendali pada SMC dapat dipisah menjadi dua bagian sinyal kendali yaitu eq dan n. dimana eq merupakan sinyal kendali ekivalen yang akan membawa trajektori status ke permukaan luncur, sedangkan n merupakan sinyal kendali natural untuk menjaga agar trajektori status tetap berada pada permukaan luncur. Berikut persamaan hubungan eq dan n.
(t ) = eq + n ...(3.19)
IV. PENGUJIANDANANALISA
A. Pengujian Open Loop Posisi Motor DC
Open loop adalah hubungan signal satu arah dari input ke sistem kontrol atau sebaliknya output dari sistem kontrol ke input. Open loop posisi derajat DC Motor perlu diuji karena setiap motor DC memiliki nilai pulsa (Ton dan Toff) yang berbeda sehingga perlu ditetapkan nilai disetiap derajat, mulai 0 derajat sampai 180 derajat.
Pada motor DC servo ini memiliki nilai frekuensi f = 50 Hz, sehingga nilai T adalah
T = ...(4.1) T =
T = 20000 us ...(4.3) Dimana :
T adalah periode pulsa.
Dengan diketahuinya nilai T = 20000 us, maka dapat disetting nilai Ton dan Toff untuk setiap derajat ( mulai 00 sampai 1800) dengan ketentuan :
T = Ton + Toff = 20000 us ...(4.4) Dimana :
Ton adalah T aktif (high) Toff adalah T off ( low )
Berikut ini adalah tabel pengujian open loop motor DC servo.
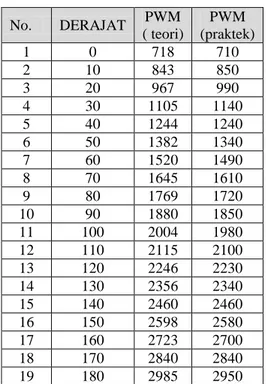
Berdasarkan tabel diatas, dapat dihitung nilai PWM secara teori sebagai berikut :
PWM =
x TOP PWM ...(4.5) Dimana :
TOP PWM = nilai max PWM = 27648 (berdasarkan perhitungan pada BAB III).
Oleh karena itu, nilai PWM setiap step adalah sebagai berikut :
Tabel 4.I Tabel open loop dalam PWM
No. DERAJAT PWM ( teori) PWM (praktek) 1 0 718 710 2 10 843 850 3 20 967 990 4 30 1105 1140 5 40 1244 1240 6 50 1382 1340 7 60 1520 1490 8 70 1645 1610 9 80 1769 1720 10 90 1880 1850 11 100 2004 1980 12 110 2115 2100 13 120 2246 2230 14 130 2356 2340 15 140 2460 2460 16 150 2598 2580 17 160 2723 2700 18 170 2840 2840 19 180 2985 2950
Pada open loop, sistem menghasilkan keluaran berdasarkan masukkan yang diberikan. Hubungan signal satu arah, input dan output tidak mempunyai hubungan. Sehingga ketika action output ke sistem yang merubah proses, tidak ada feedback yang diberikan ke loop.
Dari tabel diatas dapat diamati bahwa nilai setiap step posisi memiliki selisih yang berbeda-beda atau nilai PWM tidak linear. Hal ini dikarenakan kualitas keakurasian plant yang kurang bagus.
B. Pengujian Close Loop Posisi DC Motor
ADC pada mikrokontroller AT Mega8 ini perlu diuji karena merupakan chanel untuk masuknya data dari posisi sudut DC motor sehingga dapat mengetahui apakah terdapat error atau tidak dengan melihat nilai adc.
Tabel 4.3. Hasil Pengujian Close Loop motor DC servo
C. Pengujian Sistem dengan Penambahan Sliding Mode Controller
Dalam pengujian ini bertujuan untuk mengetahui kemampuan kontroller yang telah dibuat dengan proses seperti berikut ini:
1. Merangkai alat menjadi satu kesatuan sistem. 2. Menyalakan power supply.
3. Menghubungkan serial mikro dengan Visual Basic untuk menjalankan sistem
4. Memilih menu untuk memasukkan nilai setting point posisi sesuai yang telah ditentukan.
5. Mengamati respon keluaran yang dihasilkan oleh alat sebagai hasil kontroller yang telah ditentukan. Berikut tabel tampilan hasil pengujian sistem dengan nilai setting point mulai 100 hingga 1800 dengan step 100.
Tabel 4.5 Tabel keluaran dengan step setting point 100 Setting Point Waktu (ms) ADC Output Keterangan
10 29 422 10 Berhasil
20 60 423 20 Berhasil
30 90 425 30 Berhasil
40 120 427 40 Berhasil
50 150 428 50 Berhasil
No. DERAJAT PWM ADC
1 0 710 420 2 10 850 422 3 20 990 423 4 30 1140 425 5 40 1240 427 6 50 1340 428 7 60 1490 429 8 70 1610 430 9 80 1720 431 10 90 1850 433 11 100 1980 435 12 110 2100 438 13 120 2230 439 14 130 2340 440 15 140 2460 441 16 150 2580 442 17 160 2700 443 18 170 2840 444 19 180 2950 446
60 180 429 60 Berhasil 70 210 430 70 Berhasil 80 240 431 80 Berhasil 90 270 433 90 Berhasil 100 300 435 100 Berhasil 110 330 438 110 Berhasil 120 360 439 120 Berhasil 130 390 440 130 Berhasil 140 420 441 140 Berhasil 150 450 442 150 Berhasil 160 480 443 160 Berhasil 170 510 444 170 Berhasil 180 573 446 180 Berhasil
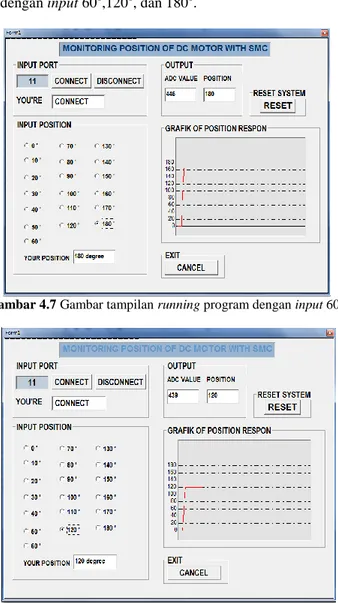
Dan dibawah ini gambar tampilan Visual Basic dengan input 600,1200, dan 1800.
Gambar 4.7 Gambar tampilan running program dengan input 600.
Gambar 4.8 Gambar tampilan running program dengan input 1200.
Gambar 4.9 Gambar tampilan running program dengan input 1800. Dari hasil pengujian sistem dengan penambahan kontroller SMC, motor DC servo mampu bergerak ke arah posisi tujuan dan mempertahankan keadaannya meskipun posisi yang didapatkan sesekali kurang presisi terhadap posisi target. Dari percobaan ini motor DC servo dapat bergerak menuju posisi yang diinginkan. Namun dari beberapa percobaan, motor servo sesekali memiliki error dan nilai keluaran respon yang lambat. Hal ini dikarenakan plant dan sensor sistem yang kurang linear dan kurang stabil, artinya perubahan plant dan sensor setiap step sudut berubah-ubah.
BAB V KESIMPULAN
A Kesimpulan
Setelah melakukan tahap perancangan dan pembuatan sistem yang kemudian dilanjutkan dengan tahap pengujian dan analisa maka dapat diambil kesimpulan sebagai berikut :
1. Sistem kontrol Sliding Mode dapat bekerja sesuai yang diharapkan dan penggunaan kontrol SMC untuk mengatur besar kecilnya sudut referensi dapat diaplikasikan pada motor DC servo.
2. Motor DC servo mampu bergerak sesuai setting point yang diberikan, walaupun sesekali masih terdapat error. Dalam hal ini tingkat keberhasilan mencapai 96%.
3. Identifikasi plant ditujukan untuk mendapatkan model matematis yang dapat menentukan perancangan kontroller.
DAFTAR PUSTAKA
[1] Paulus Setiyo Nugroho, Ari SANTOSO, “Pengaturan Robust berbasiskan Quantitative Feedback Theory (QFT) untuk Mengatasi Ketidak pastian Parameter model Motor DC”, Tugas Akhir, Maret 2003.
[2] Ari Santoso, “Kriteria Kestabilan Sistem Linier
Terlambat untuk Kasus Skalar”,
IES’2001,ITS,Nopember 2001.
[3] Ogata, K., 1917. “Modern Control Engineering” Hall, Inc.
[4] DeCarlo, A., Raymond., Zak, H., Stanislaw., Matthews, P. Gregory., 1988. “Variable Structure Control of Nonlinear Multivariable Systems: A tutorial” IEEE. [5] Ali J. Koshkouei and Keith J. Burnham, Control Of DC
Motors Using Propotional Integral Sliding Mode, 2005. [6] Anonim, 2004, .ATmega Preliminary Complete, Atmel
Corporation
[7] Wardhana. 2005. Belajar Sendiri Mikrokontroler AVR ATMega 32, Yogyakarta : Andi.
[8] http://www.educypedia.be/electronics/motorservo.htm
diakses tanggal 22 Pebruari 2011
[9] http://www.galilmc.com/learning/tutorials.php, diakses tanggal 2 Agustus 2011
[10] Wu-Chung Su, Ph.D., 2008, Sliding Mode Control with Industrial Application,Departemen of Electronical Engineering National Chung Hsing University, Taiwan.