Informasi Dokumen
- Penulis:
- Titis Wijatmiko
- Pengajar:
- Drs. Agus Murnomo, M.T
- Sekolah: Universitas Negeri Semarang
- Mata Pelajaran: Teknik Elektro
- Topik: Rancang Bangun Alat Pengatur Kecepatan Motor Universal Pada Sewing Machine Motor
- Tipe: tugas akhir
- Tahun: 2007
- Kota: Semarang
Ringkasan Dokumen
I. PENDAHULUAN
Bagian ini menjelaskan latar belakang pentingnya pengaturan kecepatan motor dalam industri, terutama untuk motor universal yang dapat beroperasi dengan sumber tegangan AC dan DC. Penelitian ini bertujuan untuk merancang alat pengatur kecepatan yang efektif dengan menggunakan rangkaian thyristor. Diharapkan alat ini dapat memberikan variasi kecepatan yang lebih baik dan menghindari arus starting yang tinggi saat motor dijalankan.
1.1. Latar Belakang
Pertumbuhan industri yang pesat membutuhkan alat yang dapat mengatur kecepatan motor untuk meningkatkan efisiensi proses produksi. Motor universal, sebagai motor yang dapat beroperasi dengan AC dan DC, menjadi fokus penelitian ini karena kemampuannya yang fleksibel. Pengaturan kecepatan yang tepat dapat mengoptimalkan kinerja motor dan mengurangi konsumsi energi.
1.2. Tujuan
Tujuan dari penelitian ini adalah untuk mengetahui pengaruh perubahan tegangan terhadap kecepatan putaran motor dan untuk menghindari arus starting yang tinggi. Penelitian ini juga bertujuan untuk memberikan pengalaman praktis dalam merancang alat pengatur kecepatan motor listrik satu fasa.
1.3. Manfaat
Manfaat dari penelitian ini adalah memberikan wawasan tentang cara kerja motor universal dan aplikasinya dalam industri. Selain itu, alat ini diharapkan dapat digunakan untuk meningkatkan efisiensi dalam pengaturan kecepatan motor, serta memberikan pengalaman praktis bagi mahasiswa dalam bidang teknik elektro.
II. LANDASAN TEORI
Bagian ini membahas teori dasar yang mendasari pengoperasian motor universal dan pengatur kecepatan. Penjelasan tentang karakteristik motor universal, serta prinsip kerja diac dan triac sebagai komponen utama dalam rangkaian pengatur kecepatan, sangat penting untuk memahami bagaimana alat ini berfungsi.
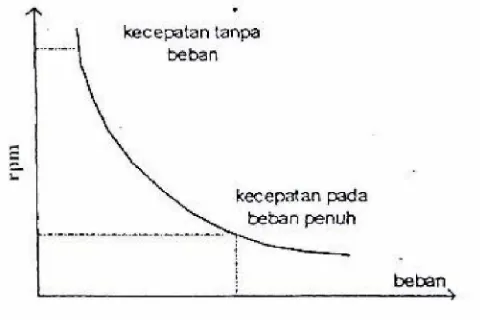
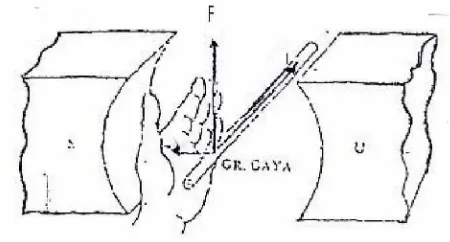
2.1. Motor Universal
Motor universal adalah motor listrik yang dapat beroperasi dengan sumber tegangan AC maupun DC. Karakteristik motor ini memungkinkan kecepatan putaran untuk bervariasi sesuai dengan beban yang diterima. Dalam penelitian ini, motor universal digunakan sebagai objek studi untuk pengaturan kecepatan.
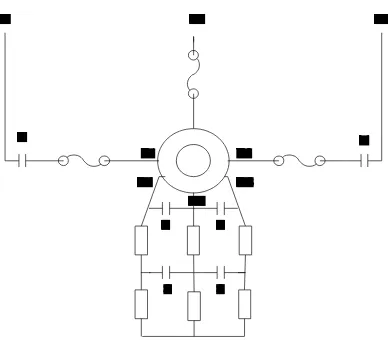
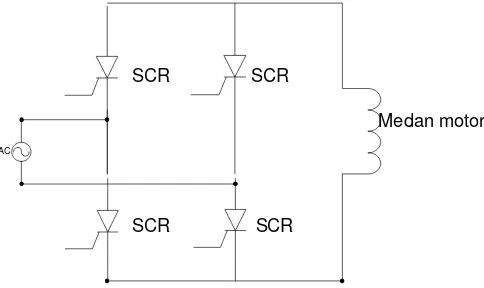
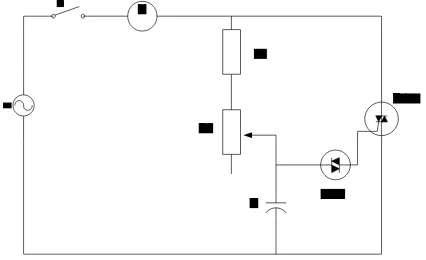
2.2. Pengaturan Kecepatan
Pengaturan kecepatan motor dapat dilakukan dengan mengubah tegangan yang diberikan. Dalam hal ini, penggunaan triac dan diac sebagai pengatur tegangan AC memungkinkan kontrol yang lebih baik terhadap kecepatan motor. Metode ini juga membantu mengurangi arus starting yang tinggi saat motor dinyalakan.
III. METODE PEMBUATAN
Bagian ini menjelaskan langkah-langkah dalam merancang dan membangun alat pengatur kecepatan motor. Proses pembuatan mulai dari persiapan alat dan bahan hingga perakitan dan pengujian alat secara menyeluruh.
3.1. Persiapan Alat dan Bahan
Persiapan alat dan bahan sangat penting untuk memastikan semua komponen yang diperlukan tersedia sebelum memulai proses pembuatan. Tabel yang mencantumkan spesifikasi alat dan bahan yang digunakan disediakan untuk memudahkan proses ini.
3.2. Proses Pembuatan
Proses pembuatan meliputi pembuatan PCB, pemasangan komponen, dan perakitan alat. Setiap langkah dijelaskan dengan rinci untuk memastikan bahwa alat yang dihasilkan berfungsi dengan baik dan sesuai dengan spesifikasi yang ditentukan.
IV. PENGUJIAN ALAT DAN PEMBAHASAN
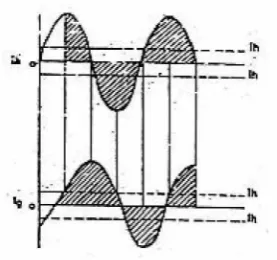
Pengujian alat dilakukan untuk mengevaluasi kinerja alat pengatur kecepatan yang telah dibuat. Hasil pengujian menunjukkan hubungan antara tegangan, arus, dan kecepatan putaran motor, serta analisis terhadap bentuk gelombang yang dihasilkan.
4.1. Pengujian Kecepatan Putaran Motor
Pengujian menunjukkan bahwa dengan meningkatkan tegangan, kecepatan putaran motor juga meningkat. Data yang diperoleh dari pengujian ini menunjukkan bahwa pengaturan kecepatan dapat dilakukan dengan efektif menggunakan alat yang dirancang.
4.2. Pembahasan
Pembahasan terkait pengaruh perubahan tegangan terhadap kecepatan dan arus motor memberikan wawasan yang lebih dalam tentang karakteristik motor universal. Penjelasan mengenai hubungan antara tegangan dan arus juga sangat penting untuk memahami cara kerja alat yang dirancang.
V. PENUTUP
Bagian ini menyimpulkan hasil penelitian dan memberikan saran untuk pengembangan lebih lanjut. Kesimpulan yang diambil berdasarkan data yang diperoleh selama pengujian memberikan gambaran yang jelas tentang efektivitas alat yang dirancang.
5.1. Kesimpulan
Dari hasil penelitian, dapat disimpulkan bahwa alat pengatur kecepatan motor universal yang dirancang dapat berfungsi dengan baik. Pengaturan kecepatan yang dilakukan dengan mengubah tegangan sumber terbukti efektif dalam meningkatkan kecepatan putaran motor.
5.2. Saran
Saran untuk penelitian selanjutnya adalah melakukan pengujian dengan komponen yang lebih berkualitas dan perencanaan yang lebih matang untuk mencapai hasil yang lebih optimal. Selain itu, perhatian perlu diberikan pada pengujian pada kecepatan rendah untuk mencegah kerusakan pada motor.
Referensi Dokumen
- Mesin-Mesin Listrik ( Achyanto, Djoko )
- Pengetahuan Teknik Elektronika ( Daryanto )
- Electric Machinery ( Fitzgerald )
- Pengantar Teknik Tenaga Listrik ( Lister Eugene C )
- Industrial Electronic ( Petruzella, D Frank )