BAB 2
DASAR TEORI
Motor Sinkron Tiga Fasa
Motor sinkron tiga fasa adalah motor listrik arus bolak-balik (AC) yang putaran rotornya sinkron/serempak dengan kecepatan medan putar statornya. Motor ini beroperasi pada sumber tegangan tiga fasa yang dihubungkan dengan kumparan jangkar di stator. Selain mendapat suplai tegangan tiga fasa, motor sinkron juga mendapat arus eksitasi/arus medan dari sumber arus searah (DC) pada kumparan medan di rotornya.
Motor sinkron pada pengoperasiannya tidak dapat melakukan start awal (self starting). Oleh karena itu, motor sinkron tiga fasa membutuhkan penggerak mula (prime mover) untuk memutar rotor sampai pada kecepatan putar sinkronnya. Perubahan beban pada motor sinkron tidak mempengaruhi kecepatan putarnya, karena ketika motor bekerja, medan magnet pada rotor akan selalu terikat atau terkopel secara magnetis dengan medan putar statornya, sehingga rotor akan dipaksa terus berputar pada kecepatan sinkronnya. Sehingga motor sinkron biasanya digunakan pada sistem operasi yang membutuhkan kecepatan konstan pada beban yang berubah-ubah. Namun apabila beban yang diberikan sudah melewati batas kemampuan dari motor maka motor akan melepas kecepatan sinkronnya dan berhenti berputar.
Keuntungan lain dari motor sinkron adalah tidak hanya dapat bekerja pada faktor daya terbelakang (lagging) seperti motor induksi, namun juga dapat bekerja dengan faktor daya unity bahkan dengan faktor daya mendahului (leading). Sehingga motor sinkron dapat berperan untuk memperbaiki faktor daya sistem.
Konstruksi Motor Sinkron Tiga Fasa
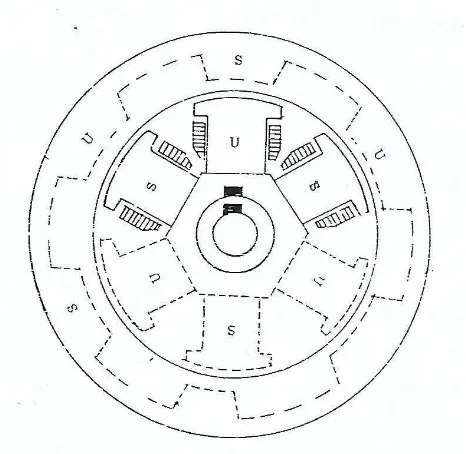
Pada prinsipnya, konstruksi motor sinkron sama dengan generator sinkron. Secara umum, konstruksi motor sinkron tiga fasa terdiri dari stator (bagian yang diam) dan rotor (bagian yang bergerak). Keduanya merupakan rangkaian magnetik yang berbentuk simetris dan silindris.
Gambar 2.1 Konstruksi Motor Sinkron
2.2.1 Stator
Secara umum stator terdiri dari kerangka stator, inti stator, belitan dan slot.
1. Rangka Stator
dibentuk sedemikian rupa sehingga diperoleh rangka yang sesuai dengan kebutuhan.
2. Inti Stator
Inti stator melekat pada rangka stator dimana inti ini terbuat dari laminasi-laminasi besi khusus atau campuran baja. Hal ini diperbuat untuk memperkecil rugi arus Eddy. Tiap laminasi diberi isolasi dan diantaranya dibentuk celah sebagai tempat aliran udara.
3. Slot
Slot adalah tempat konduktor berada yang letaknya pada bagian dalam sepanjang keliling stator. Bentuk slot ada 3 yaitu Slot Terbuka, Slot Setengah Terbuka,dan Slot Tertutup.
2.2.2 Rotor
Sebagai tempat belitan penguat yang membentuk kemagnetan listrik kutub Utara-Selatan pada inti rotor. Ada 2 macam bentuk rotor, yaitu :
1. Rotor kutub menonjol (Salient Pole Rotor)
Rotor tipe ini mempunyai kutub yang jumlahnya banyak. Kumparan dibelitkan pada tangkai kutub, dimana kutub-kutub diberi laminasi untuk mengurangi panas yang ditimbulkan oleh arus Eddy, kumparan-kumparan medannya terdiri dari bilah tembaga persegi. Kutub menonjol ditandai dengan rotor berdiameter besar dan panjang sumbunya pendek.
2. Rotor silinder (Non-Salient Pole Rotor)
pun sedikit yang dapat dibuat. Rotor ini biasanya berdiameter kecil dan sumbunya sangat panjang. Konstruksi ini memberikan keseimbangan mekanis yang lebih baik karena rugi-rugi anginnya lebih kecil dibandingkan rotor kutub menonjol (salient pole rotor).
Prinsip Kerja Motor Sinkron Tiga Fasa
Pada motor sinkron tiga fasa terdapat 2 sumber tegangan dari luar yaitu arus bolak-balik (AC) yang dialirkan kebelitan jangkar dan arus searah (DC) yang dialirkan kebelitan medannya. Perputaran rotor diakibatkan karena adanya kopel magnetik antar medan magnet rotor dengan medan putar stator.
Apabila tegangan tiga fasa dihubungkan ke kumparan jangkar atau stator akan menghasilkan arus tiga fasa yang mengalir pada kumparan stator tersebut. Jika arus tiga fasa (yang berbentuk sinusoidal murni atau saling berbeda sudut 1200 listrik) mengalir pada kumparan stator motor sinkron tiga fasa, maka akan menghasilkan intensitas medan magnet (HS) yang juga saling berbeda sudut 1200
listrik. Karena kumparan stator mempunyai permeabilitas (µ), maka akan menghasilkan intensitas medan magnet sebesar Bs= µ.Hs
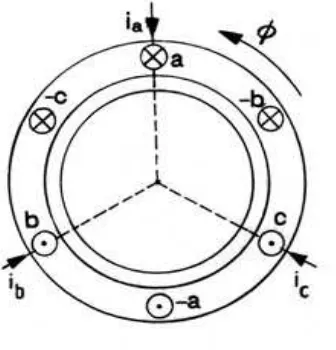
Gambar 2.2 Kumparan a-a, b-b, c-c
Gambar 2.3 Distribusi ia, ib, icsebagai fungsi waktu
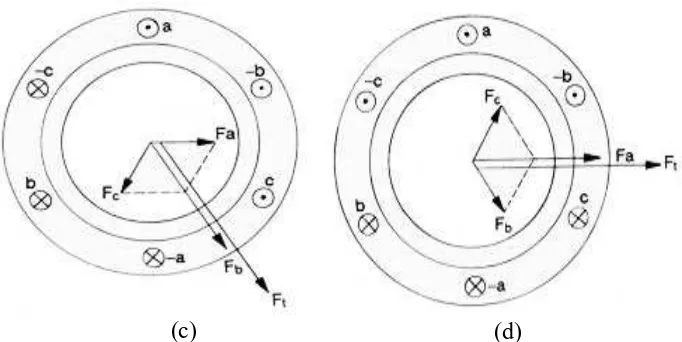
Gambar 2.4 Arah Fluks Secara Vektoris
Saat tegangan tiga fasa dihubungkan ke kumparan a-a, b-b, c-c (Gambar 2.2) dengan beda fasa masing-masing 1200. Maka akan timbul 3 buah arus sinusoidal (Ia, Ib, Ic) yang terdistribusi berdasarkan fungsi waktu
seperti terlihat pada (Gambar 2.3). Secara vektoris, pada keadaan t1, t2, t3, t4, arah fluks resultan yang ditimbulkan oleh kumparan tersebut masing-masing ditunjukkan seperti pada (Gambar 2.4). Pada saat t1, arah fluks resultannya sama dengan arah fluks yang dihasilkan kumparan a-a (Gambar 2.4a). Pada saat t2, arah fluks resultannya sama dengan arah fluks yang dihasilkan kumparan b-b (Gambar 2.4b). Pada saat t3, arah fluks resultannya sama dengan arah fluks yang dihasilkan kumparan c-c (Gambar 2.4c). Pada saat t4, arah fluks resultannya berlawanan arah dengan arah fluks yang dihasilkan kumparan a-a (Gambar 2.2d). Perubahan arah fluks ini akan terjadi berulang setiap satu periode yang menyebabkan perputaran medan magnet stator.
Kutub medan rotor yang diberi penguatan arus searah mengakibatkan mengalir arus penguat If motor dan menghasilkan medan
magnet BR. Karena motor sinkron tidak dapat melakukan start sendiri (self
starting) maka rotor diputar dengan suatu penggerak mula sampai pada kecepatan putar rotor sama dengan kecepatan putar medan stator. Sehingga medan magnet rotor BRakan mendapat tarikan dari kutub medan putar stator
dan akan selalu menempel dan mengikuti putaran BSdengan kecepatan yang
sama atau sinkron. Interaksi antar kedua medan magnet tersebut akan menghasilkan kopel yang dinyatakan sebagai :
Tind= k.BRx B
Tind= k.BR.BS.Sin
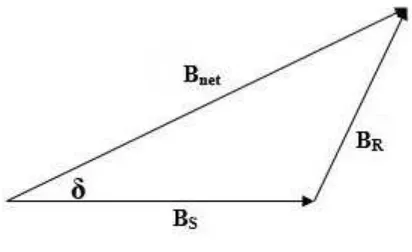
Dan hubungannya dengan diagram medan magnetnya ditunjukkan pada Gambar 2.5 berikut.
Gambar 2.5 Diagram medan magnet motor sinkron
Keterangan :
BS = Medan magnet stator
BR = Medan magnet rotor
Bnet = Resultan medan magnet stator dan rotor
Sehingga didapat : Bnet Vph ; BR EA ; BS j.Xs.IA
Karena BS = Bnet- BR
Maka dengan mensubstitusikan persamaan (2.2) ke persamaan (2.1), maka akan diperoleh :
Tind= k . BR(Bnet BR) Sin
Tind= k . BR. Bnet. Sin k . BR .BRSin BR.BR=0
Sehingga persamaan kopel induksinya dapat dituliskan : Tind= k . BR. Bnet. Sin (N.m)
dimana : k = Konstanta
BR = Medan magnet rotor
Bnet = Resultan medan magnet rotor dan medan magnet stator
= Sudut kopel
Pada beban nol, sumbu kutub medan berhimpit dengan sumbu kutub kumparan medan ( = 0). Setiap penambahan beban membuat medan rotor tertinggal sebentar dari medan stator, terbentuk sudut kopel ( ), untuk kemudian berputar dengan kecepatan sama lagi (sinkron). Penambahan beban lebih lanjut mengakibatkan hilangnya kekuatan kopel dan motor disebut kehilangan sinkronisasi.
(2.2)
Gambar 2.6 Kedudukan kutub rotor terhadap kutub khayal pada saat motor berbeban
Rangkaian Ekivalen Motor Sinkron
Rangkaian ekuivalen motor sinkron adalah sama halnya dengan generator sinkron, kecuali untuk arah aliran dayanya dimana arah aliran daya pada motor sinkron terbalik dengan arah daya pada generator sinkron. Karena arah aliran daya ini terbalik, maka arah arus yang mengalir ke stator motor juga akan terbalik. Dengan demikian, rangkaian ekuivalen motor sinkron adalah sama dengan rangkaian ekuivalen generator sinkron, kecuali bahwa referensi arah IA dibalik.
Rangkaian ekuivalennya diperlihatkan pada gambar (2.7) dan rangkaian per fasanya ditunjukkan pada gambar (2.8). Rangkaian ekuivalen tiga fasa biasa dalam bentuk hubungan Y atau hubungan Delta ( ).
Karena perubahan arah IA ini, maka persamaan tegangan menurut hukum
= + . . + .
Jadi persamaan ini sama dengan persamaan generator sinkron, kecuali tanda untuk arusnya adalah terbalik.
Gambar 2.7 Rangkaian ekuivalen motor sinkron 3 fasa
Gambar 2.8 Rangkaian ekuivalen motor sinkron per fasanya
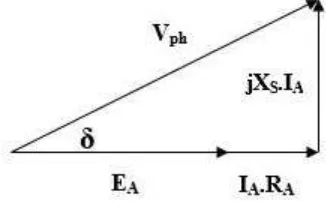
Gambar 2.9 Diagram Fasor Motor Sinkron Dengan Faktor Daya Satu (Unity) Dari persamaan umum motor sinkron yang dituliskan di dalam persamaan (2.3) dapat digambarkan diagram fasor motor sinkron seperti ditunjukkan pada gambar (2.9) sebagai berikut :
Keterangan :
EA = Tegangan Jangkar (GGL lawan)
IA = Arus Jangkar
Vph = Tegangan Terminal XS = Reaktansi Sinkron Motor
= Sudut Kopel
Dalam hal ini motor dianggap beroperasi dengan faktor daya satu (unity). Namun dalam operasi motor sinkron, motor dapat beroperasi dengan faktor daya mendahului (leading) dan tertinggal (lagging) selain dengan faktor daya unity.
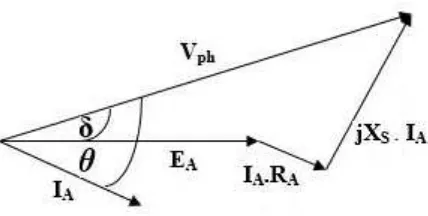
Gambar 2.10 Diagram Fasor Motor Sinkron Dengan Faktor Daya Leading
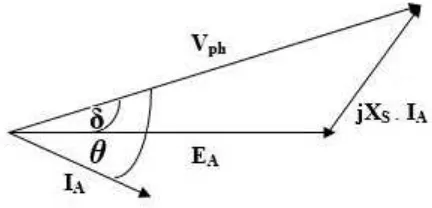
Gambar 2.11 Diagram Fasor Motor Sinkron Dengan Faktor Daya Lagging Namun pada kenyataannya, saat motor sinkron dibebani tanpa pengaturan arus medan, motor sinkron akan beroperasi dengan faktor daya tertinggal (lagging) dan diagram fasornya seperti yang ditunjukkan pada gambar (2.11). Oleh karena itu, untuk menganalisis motor sinkron digunakan diagram fasor motor sinkron dengan faktor daya tertinggal (lagging).
Dari diagram fasor motor sinkron didapat daya mekanik (Pmek) motor
sinkron menurut persamaan berikut :
= .
Untuk motor sinkron tiga fasa maka persamaan daya mekanik (Pmek) menjadi:
= 3. .
(2.5)
Karena tahanan jangkar (RA) motor sinkron biasanya kecil, maka tahanan
jangkar ini biasanya diabaikan. Bila tahanan jangkar (RA) diabaikan (RA<<XS)
maka diagram fasornya menjadi seperti yang ditunjukkan pada Gambar 2.12.
Gambar 2.12 Diagram Fasor Yang Disederhanakan Dengan RADiabaikan
Dari diagram fasor yang ditunjukkan pada Gambar 2.12 diperoleh :
. = Xa. Ia
Maka diperoleh,
= .
Jika persamaan (2.10) disubstitusikan ke persamaan (2.5), maka diperoleh :
=3. . .
Metode Starting Motor Sinkron
Sesuai dengan prinsip kerjanya, motor sinkron tidak dapat melakukan start sendiri (self starting). Motor sinkron harus diputar terlebih dahulu sampai pada putaran sinkronnya. Hal ini dilakukan oleh penggerak mula (prime mover). Biasanya, motor induksi atau motor DC mengambil peranan sebagai penggerak (2.7)
(2.8)
mula tersebut. Tetapi penggunaan penggerak mula dalam start motor sinkron sangat tidak praktis. Maka untuk start motor sinkron dapat dilakukan dengan cara lain.
Saat ini ada tiga pendekatan utama yang dapat dilakukan untuk menjalankan motor sinkron dengan aman, yaitu :
1. Menggunakan penggerak mula (prime mover) untuk memutar motor sinkron sampai pada kecepatan sinkronnya
2. Mereduksi putaran dengan mengatur medan stator ke harga yang cukup rendah sampai rotor berputar (mengurangi frekuensi)
3. Menggunakan kumparan peredam (Amortisseur Winding).
2.5.1 Starting Dengan Penggerak Mula
Pada metode start motor sinkron dengan penggerak mula, motor sinkron dikopel dengan penggerak mula (prime mover), selanjutnya penggerak mula akan memutar rotor motor sinkron sampai mencapai putaran sinkronnya. Selanjutnya motor sinkron tersebut diparalelkan dengan jala-jala dan bekerja sebagai generator. Setelah hal ini dicapai, penggerak mula dilepas dari poros motor. Ketika penggerak mula dilepas dari poros motor, poros motor akan berputar perlahan (putarannya menurun) sehingga medan magnet rotor (BR) akan tertinggal dibelakang Bnetdan
mesin akan start beraksi sebagai motor. Saat paralelnya sudah komplit, maka motor sudah dapat dibebani.
2.5.2 Starting Dengan Mereduksi Frekuensi
Ns =120
Dimana :
f = frekuensi tegangan terminal motor (Hz) p = jumlah kutub motor
Ns = perputaran medan magnet stator (rpm)
Cepatnya perputaran medan magnet stator ini membuat tidak mungkinnya terjadi interaksi tarik-menarik dan tolak-menolak antara kutub medan magnet stator dengan kutub medan magnet rotor yang diam.
Pada metode start dengan mereduksi frekuensi ini, pada saat start, motor disuplai dengan frekuensi yang rendah sehingga kecepatan putaran medan putar stator juga rendah. Hal ini akan membuat terjadinya interaksi tarik-menarik dan tolak-menolak antara kutub medan magnet stator dan kutub medan magnet rotor. Setelah terjadi interaksi antara kedua kutub medan magnet tersebut, maka frekuensi sistem dapat dinaikkan secara perlahan sampai pada frekuensi dan kecepatan sinkron yang diinginkan. Saat ini, pengaturan besar frekuensi yang disuplai dapat dilakukan dengan menggunakan rectifier-inverter dan cycloconverter.
2.5.3 Starting Dengan Kumparan Peredam
Pada metode start dengan kumparan peredam, rotor dilengkapi dengan kumparan peredam atau kumparan sangkar tupai yang ditempatkan pada permukaan rotor yang dihubung singkat pada kedua ujungnya.
GGL kedalam kumparan peredam yang telah terhubung singkat, maka dalam kumparan peredam akan mengalir arus. Arus ini akan menimbulkan kopel antara rotor dengan stator secara magnetis sehingga rotor pun berputar. Namun kecepatan putar rotor tidak sama dengan kecepatan sinkronnya. Pada saat ini, motor sinkron bertindak sebagai motor induksi karena terdapat slip antara kecepatan putar rotor dengan kecepatan medan putar statornya.
Setelah putaran rotor hampir mencapai kecepatan sinkronnya, maka kumparan medan penguat yang berada pada rotor dieksitasi dengan sumber arus DC. Selanjutnya motor akan menuju ke keadaan sinkron. Namun dalam pelaksanaan metode start ini dibutuhkan alat pengaturan sinkronisasi untuk menghindarkan efek yang dapat merusak motor tersebut.
Pengaruh Perubahan Arus Eksitasi Motor Sinkron
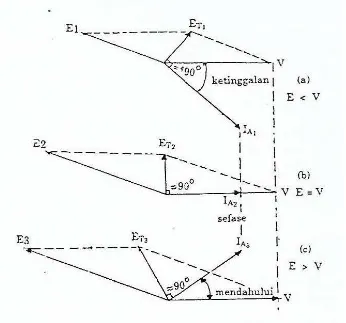
Dengan mengatur arus kemagnetan dari sebuah motor sinkron maka diperoleh :
a. Jika arus penguat kecil dengan arti arus penguat lebih kecil dari Im normal maka E < V, Ia ketinggalan terhadap V sehingga mengakibatkan motor bersifat induktif (lagging). Lihat Gambar 2.13a
b. Jika arus penguat sedemikian sehingga E = V, Ia akan sefasa dengan V sehingga motor bersifat resistif (unity). Pada saat cos motor = 1, dikatakan arus penguat (Im) normal. Gambar 2.13b
Gambar 2.13 Diagram vektor motor sinkron dengan beban tetap arus penguat diubah-ubah
2.6.1 Karakteristik Kurva V Motor Sinkron
Gambar 2.14 Kurva V Motor Sinkron
2.6.2 Karakteristik Kurva V Invers Motor Sinkron