ARCHAEOLOGICAL DOCUMENTATION OF A DEFUNCT IRAQI TOWN
J. Šedina a, K. Pavelka a, E. Housarová a
a Czech Technical University in Prague, Faculty of Civil Engineering, Department of Geomatics, Thakurova 7, 166 29, Prgue 6,
Czech Republic – [email protected]
Commission I, ICWG I/Vb
KEY WORDS: RPAS, photogrammetry, archaeological documentation, DTM, orthophoto
ABSTRACT:
The subject of this article is the possibilities of the documentation of a defunct town from the Pre-Islamic period to Early Islamic period. This town is located near the town Makhmur in Iraq. The Czech archaeological mission has worked at this dig site. This Cultural Heritage site is threatened by war because in the vicinity are positions of ISIS. For security reasons, the applicability of Pleiades satellite data has been tested. Moreover, this area is a no-fly zone. However, the DTM created from stereo-images was insufficient for the desired application in archeology. The subject of this paper is thetesting of the usability of RPAS technology and terrestrial photogrammetry for documentation of the remains of buildings. RPAS is a very fast growing technology that combines the advantages of aerial photogrammetry and terrestrial photogrammetry. A probably defunct church is a sample object.
1. INTRODUCTION
For the initial archaeological survey, Lidar data, satellite imagery and aerial photogrammetry is usually used. Possibilities of semi-automatic detection for various types of data are well known algorithms. Documentation of objects is usually done by laser scanning, terrestrial and aerial photogrammetry and now widely used and versatile technology RPAS (Sedina et al, 2016; Housarova et al, 2015). RPAS experienced great development in the last few years, their main advantage is that they combine the advantages of aerial and terrestrial photogrammetry, and that they can carry other various sensors (Jon et al, 2013). The great benefit of RPAS in archaeology (Saleri et al, 2013; Bolognesi et al, 2014; Themistocleous et al, 2015) is that they are capable of imaging, within cm, and it is possible to image the site several times per day, and has the greatest benefit to the thermal imaging of archaeological sites (Casana et al, 2014). A map of the area with diurnal temperature variation is able to show the detection of underground objects. Another tool for the detection of subsurface objects are geophysical instruments. Combining geophysical measurements with RPAS measurements, it is possible to create a model of an archaeological site showing above ground part of objects and its underground parts (Sedina et al, 2015).
2. ARCHAEOLOGICAL SITE MAKHMUR AL-QADIMA
The Czech archaeological mission, led by Assoc. prof. Mgr. Karel Nováček, Ph.D. from the University of West Bohemia, has operated continuously in Iraq since 2006. The selected site to the survey was Makhmur al-Qadima (Fig. 1), located in northern Iraq, in Kurdistan, near the town of Makhmur. Makhmur al-Qadima is an extinct town from the Pre-Islamic period to the Early Islamic period; the site area is approximately 100 ha. The Laboratory of Photogrammetry on CTU in Prague, represented by prof. Dr. Ing. Karel Pavelka, was involved in this project to map the site and to document the selected objects. For the mapping of the area, an RPAS eBee (wing type) was used, using a VIS (Canon IXUS 127 HS) and NIR (Canon
ELPH 110 HS) camera (both 16 Mpix resolution). For the documentation of chosen objects we used a Canon EOS 450D camera. For the whole site, they acquired 548 images by NIR camera, 536 by VIS camera and from the detailed flight, they captured 97 images by VIS camera. All images were processed into a single project. The subject of this paper is the processing of the documentation of building debris, which was probably a defunct Church, see Figure 1. For the defunct church, we acquired 201 images by camera Canon EOS 450D. Another set of data was from the Pleiades satellites imaging. The date of acquisition was 12. November 2013. We achieved a DSM (Digital Surface Model), an RGB image and a NIRRG image. Our data supplier was the Czech company Gisat s.r.o. DSM resolution is 1 m and orthophoto resolution is 0.5 m.
Figure 1. Makhmur al-Qadima site and processed defunct Church
3. DATA PROCESSING
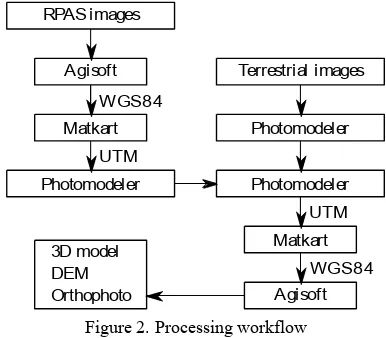
The aim was to create a georeferenced 3D model of the chosen object. However, due to the absence of terrestrial measurements of control points and the inability to process images from RPAS together with terrestrial images in software Agisoft PhotoScan
Professional, this procedure, according to Figure 2 had to be chosen. Data was taken by RPAS eBee using the VIS camera and the Canon EOS 450D. The main difficulty was that the terrestrial images and RPAS images had an included angle of about 90 degrees, making it impossible for connecting descriptors between RPAS and terrestrial images. Oblique images were missing for the possibility of processing all acquired images together. The processing of RPAS images with terrestrial images failed in the Photomodeler Scanner software when using 3 different cameras (focal lengths that had not been calibrated and due to the non-optimal intersection of images. Images weren't acquired primarily for the intersection photogrammetry because the, overlay of images was too small, or because the projection centres of the cameras were too close together and the tie points were determined with a too small (processed in software Agisoft PhotoScan 1.2.3), which includes all RPAS images (approximately 1200). For this purpose, 97 images from the detailed flight were chosen with a 3 cm GSD (Ground Sampling Distance). Only images depicting the chosen church and its surroundings (14 images) have been selected for further processing. From the mapping project of the archaeological site, the adjusted coordinates of projection centres were exported. These coordinates were transformed to UTM zone 38N coordinate system by Matkart software, developed at our Department of Geomatics, FCE, CTU in Prague. The height was left adjusted to the ellipsoidal height of WGS84. Distortions of the map projection of UTM were ignored, as the height differences of the model were in units of m and the size of the area of the church was approximately 50 m. UTM coordinates were subsequently reduced for further use in Photomodeler Scanner software. The processing of 14 RPAS images was done in Photomodeler Scanner as an Automated Project - SmartPoints Project. Elements of interior orientation were determined by reverse calibration. Table 1 shows the achieved accuracy of the project.
Calibration Quality Values Overall Residual RMS [pix] 0.60 Maximum Residual [pix] 2.51 Photo Coverage [%] 89
Table 1. Achieved accuracy of RPAS images project
38 terrestrial images were processed in Photomodeler Scanner software as a Standard Project. In Table 2 is processing parameters of the project.
Calibration Quality Values Overall Residual RMS [pix] 0.69 Maximum Residual [pix] 1.92 Photo Coverage [%] 91
Table 2. Achieved accuracy of terrestrial images project
Both projects were merged and it found 28 tie points with achieved standard deviations, with largest residual are shown in Table 3. RPAS images GSD were 3 cm, and if this value is taken into account, then the standard deviations of tie points cannot be expected in millimetres. If we use the average standard deviation in pixels, and considering the GSD of RPAS images, it is more likely that the standard deviation of the tie points (i.e. the accuracy of models connection from RPAS images and terrestrial images) will be equal to a multiple of the average standard deviation in pixels and GSD of RPAS images, i.e. 2.64 cm. If this standard deviation is considered as a space error, it can be divided into the individual components of coordinates according to the ratio of standard errors of space; see Table 4 - Estimated accuracy. It was then transformed into the reduced UTM system. 14 projection centres of cameras of RPAS images (UTM coordinates of adjusted projection centres from Agisoft PhotoScan) were then selected as identical points of transformation. Table 4 summarizes the accuracy of the transformation of projection centres of cameras into UTM.
Tie point accuracy
Mean RMS Residual [pix] 0.88 Mean Largest Residual [pix] 1.62
Table 3. Achieved accuracy of tie points of merged projects
Where SDX,Y,Z is standard deviation of X, Y and Z coordinate
Table 4. Achieved accuracy of UTM transformation of projection centres of cameras
Where SD is standard deviation, Max is maximum value and Min is minimum value.
The coordinates of projection centres of terrestrial images were exported from Photomodeler Scanner software. After that, the coordinates of the projection centres were transformed into the WGS84 system by Matkart software. For 38 terrestrial images, coordinates of projection centres were imported to EXIF data of images by software Exif Pilot; the accuracy of imported elements of exterior orientation was approximately 3 cm (0.001"). Terrestrial images were processed in Agisoft PhotoScan software. The achieved standard deviations of projection centres of 38 terrestrial images are shown in Table 5. The most important parameters of the model processing in Agisoft PhotoScan are given in Table 6.
X [m] Y [m] Z [m]
SD 0.063 0.013 0.024
Table 5. Achieved standard deviations of terrestrial images projection centres
Where SD is standard deviation.
Align Photos
Accuracy Highest
Build Dense Cloud (48 mil.)
Quality High
Build Mesh (40 mil.)
Surface type Arbitrary
Face Count 40 mil.
Table 6. Parameters of Agisoft Photoscan processing
If we should to estimate the positional accuracy of the model, it seems most appropriate to use a propagation of errors, as seen from Table 7, with coordinate standard deviations around 10 cm. This positional accuracy of the model is related to the RPAS imaging, with the project of mapping using 1200 bundle adjusted images.
X [m] Y [m] Z [m]
SD 0.134 0.104 0.078
Table 7. Estimated standard deviations of positional accuracy
Where SD is standard deviation.
4. OUTPUTS EVALUATION
Outputs includes a 3D model as a point cloud and mesh, raster DTM and orthophoto. We compared raster DTMs of RPAS imaging, terrestrial imaging and DTM created from the Pleiades satellites imaging. The resolution of the RPAS DTM is 6 cm (see Figure 3) and the terrestrial images DTM resolution is 2 cm. In the latter, it is possible to distinguish individual stones and this gives us much more detail than the RPAS DTM (see Figure 4). As you can see at Figure 5, the resolution of the Pleiades DTM is a low 1 m. The 2 cm orthophoto created from terrestrial images is quite noisy, as shown at detail in Figure 6. Figure 7 shows the detail of the RPAS orthophoto. Its resolution is 3 cm, which provides sufficient detail of orthophoto and low noise in the data. The Pleiades orthophoto has a 0.5 m resolution and gives us a good overview of the archaeological site, but for analysis of individual structures, its resolution is insufficient, as shown in Figure 8. Compared to this, RPAS orthophoto has satisfying detail, as seen in Figure 9. An overview of a 3D model (point cloud) is in Figure 10.
Figure 3. Raster DTM from RPAS imaging
Figure 4. Raster DTM created from terrestrial imaging
Figure 5. Raster DTM created from Pleiades satellites imaging
Figure 6. Detail of noisy orthophoto (terrestrial imaging)
Figure 7. Detail of RPAS orthophoto
Figure 8. Pleiades satellites orthophoto of the defunct church
Figure 9. RPAS orthophoto of the defunct church
Figure 10. Overview of point cloud model
5. CONCLUSIONS
The paper introduced a procedure for processing images from RPAS and terrestrial imaging, without using control points. The achieved accuracy of the model is about 10 cm for each coordinate, but this accuracy is based on the initial model of the RPAS mapping. The obtained 3D model (point cloud) has reached 48 mil. points and 40 mil. polygons. The raster DTM has a resolution of 2 cm, which is 10 times more detailed in resolution than the raster DTM of RPAS imaging. Moreover, at this DTM it is possible to distinguish individual stones, but conversely, the orthophoto is quite noisy and has a low value for archaeological purposes. Finally, the Pleiades satellite data was evaluated for archaeological purposes.
ACKNOWLEDGEMENTS
This work was supported by the Grant Agency of the Czech Technical University in Prague, under grant no. SGS16/063/OHK1/1T/11 – Innovative Approaches in the Field of Geomatics: Data Collection, Processing and Analyses.
REFERENCES
Bolognesi, M., Furini, A., Russo, V., Pellegrinelli, A., Russo, P., 2015. Testing the low-cost rpas potential in 3D cultural heritage reconstruction, International Archives of the Photogrammetry, Remote Sensing and Spatial Information
Sciences - ISPRS Archives 2015, pp. 229-235.
Casana, J., Kantner, J., Wiewel, A., Cothern, J., 2014. Archaeological aerial thermography: A case study at the Chaco-era Blue J community, New Mexico. Journal of Archaeological
Science, 45(1), pp. 207-219.
Housarova, E., Pavelka, K., Sedina, J., 2015. Testing rpas for cadastre purposes, International Multidisciplinary Scientific GeoConference Surveying Geology and Mining Ecology
Management, SGEM 2015, pp. 1135-1142.
Saleri, R., Cappellini, V., Nony, N., De Luca, L., Pierrot-Deselligny, M., Bardiere, E., Campi, M., 2013. UAV photogrammetry for archaeological survey: The Theaters area of Pompeii, Proceedings of the DigitalHeritage 2013 - Federating the 19th Int'l VSMM, 10th Eurographics GCH, and 2nd UNESCO Memory of the World Conferences, Plus Special
Sessions fromCAA, Arqueologica 2.0 et al. 2013, pp. 497-502.
Sedina, J., Pavelka, K., Housarova, E., 2016. Rpas as a tool for mapping and other special work, Advances and Trends in Engineering Sciences and Technologies - Proceedings of the International Conference on Engineering Sciences and
Technologies, ESaT 2015 2016, pp. 405-411.
Sedina, J., Housarova, E., Bila, Z., 2015. Archaeological survey by combination RPAS and geophysical methods, International Multidisciplinary Scientific GeoConference Surveying Geology
and Mining Ecology Management, SGEM 2015, pp. 989-993.
Themistocleous, K., Agapiou, A., Cuca, B., Hadjimitsis, D. G., 2015. Unmanned aerial systems and spectroscopy for remote sensing applications in archaeology, International Archives of the Photogrammetry, Remote Sensing and Spatial Information
Sciences - ISPRS Archives 2015, pp. 1419-1423.