TUGAS AKHIR
ANALISIS KARAKTERISTIK TEGANGAN DAN EFISIENSI
MOTOR INDUKSI TIGA FASA SEBAGAI GENERATOR
INDUKSI DENGAN KELUARAN SATU FASA
Diajukan untuk memenuhi salah satu persyaratan dalam menyelesaikan pendidikan sarjana (S-1) pada Departemen Teknik Elektro
Oleh :
NIM : 050402089 JULIUS HUTAGAOL
DEPARTEMEN TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA
MEDAN
ANALISIS KARAKTERISTIK TEGANGAN DAN EFISIENSI MOTOR
INDUKSI TIGA FASA SEBAGAI GENERATOR INDUKSI DENGAN
KELUARAN SATU FASA
Oleh :
NIM : 05 0402 089 JULIUS HUTAGAOL
Tugas Akhir ini diajukan untuk melengkapi salah satu syarat untuk memperoleh gelar sarjana Teknik Elektro
Disetujui oleh : Dosen Pembimbing
NIP : 19530622 198103 1 002 Ir. SYAMSUL AMIEN M.Si.
Diketahui oleh :
PELAKSANA HARIAN
KETUA DEPARTEMEN TEKNIK ELEKTRO FT USU
NIP : 19461022 197302 1 001 Prof. Dr. Ir. USMAN S. BAAFAI
DEPARTEMEN TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA
MEDAN
ABSTRAK
Penggunaan motor induksi tiga fasa sebagai generator induksi dengan
keluaran satu fasa dapat dilakukan dengan menghubungkan kapasitor dengan
konfigurasi C-2C pada terminal mesin yang terhubung Δ (segitiga), dimana pada satu fasa tempat beban terhubung terpasang sebesar C, pada fasa yang lain sebesar 2C, dan pada fasa ketiga tidak ada. Percobaan dilakukan dengan membuat variasi terhadap kapasitansi kapasitor, kecepatan putaran generator, dan besar beban. Dari
percobaan diperoleh hasil, bahwa kapasitansi kapasitor dan kecepatan putaran generator sangat berpengaruh terhadap karakteristik tegangan keluaran disamping
KATA PENGANTAR
Pertama-tama, penulis ingin memanjatkan puji dan syukur kepada Tuhan Yesus yang dengan kasih setia-Nya memberikan berkat dan rahmat-Nya sehingga
tugas akhir ini dapat diselesaikan. Adapun tugas akhir yang berjudul “Analisis Karakteristik Tegangan dan Efisiensi Motor Induksi Tiga Fasa Sebagai Generator Induksi dengan Keluaran Satu Fasa” penulis kerjakan untuk memenuhi salah satu
syarat wajib dalam kurikulum pembelajaran di Departemen Teknik Elektro USU untuk memperoleh gelar Sarjana Teknik.
Sebagai makhluk sosial, tentunya penulis tak luput dari pertolongan banyak pihak, baik dalam bentuk materil maupun imateril, banyak ataupun sedikit yang telah membantu penulis dalam menyelesaikan tugas akhir ini. Untuk itulah
seyogyanya penulis menghaturkan ucapan terima kasih kepada :
1. Kedua orang tua (C.M. Hutagaol dan N. br Marpaung) yang telah banyak
memberikan kasih sayang yang tak ternilai harganya sehingga penulis mampu, bersemangat, dan berkemauan keras untuk dapat menyelesaikan tugas akhir ini. Juga untuk adik-adikku tercinta (Theresha Melani,
Theresia Meilana, dan Natalia) dan Frianti Oktavia yang memberikan semangat, perhatian, dan banyak bantuannya kepada penulis dalam
menyelesaikan tugas akhir ini.
2. Dosen pembimbing, Bapak Ir. Syamsul Amien M.Si. yang telah
memberikan pandangan dan arahannya kepada penulis untuk
3. Dosen wali, Bapak Ir. Kasmir Tanjung yang telah banyak memberikan
pandangan dan nasehat kepada penulis selama menjalani masa perkuliahan.
4. Bapak Prof. Dr. Ir. Usman S. Baafai selaku Pelaksana Harian Ketua
Departemen Teknik Elektro FT USU dan Bapak Rachmat Fauzi S.T., M.T. selaku Sekretaris Departemen Teknik Elektro FT USU.
5. Bapak Ir. Satria Ginting selaku Kepala Laboratorium Konversi Energi
Departemen Teknik Elektro FT USU.
6. Muhammad Iqbal selaku asisten Laboratorium Konversi Energi yang telah
banyak membantu penulis dalam melakukan percobaan dan Bang Isroy Tanjung selaku Staff Administrasi Laboratorium Konversi Energi
7. Seluruh Bapak/Ibu Dosen dan Staf Pegawai di Departemen Teknik Elektro
USU.
8. Teman-teman kuliah Lemuel, Herman Salim, Tommy, Mangiring, Beni,
dan seluruh angkatan 03, 04, 05, 06, 07, dan 08 yang tidak dapat penulis sebutkan namanya satu-persatu, yang banyak maupun sedikit telah
memberikan masukan dan perhatiannya kepada penulis.
9. Teman-teman seperjuangan alumni SMAN 05 Jambi di USU, Yeni, David,
Wawan, Menuk, Meri, atas semangat yang telah diberikan.
10. Teman-teman kos JG 411, yang banyak menemani keseharian penulis,
memberikan dorongan dan perhatian kepada penulis dalam menyelesaikan
Penulis menyadari bahwa tugas akhir ini masih banyak memiliki kekurangan
dan kesalahan, oleh karena itu penulis mengharapkan saran dan masukan yang membangun dari semua pihak dalam tercapainya perbaikan tugas akhir ini.
Namun demikian, sedikit banyaknya penulis mengharapkan tugas akhir ini dapat berguna dan memberikan inspirasi dalam pengembangan ilmu pengetahuan.
Medan, Juni 2010
DAFTAR ISI
ABSTRAK ……….. i
KATA PENGANTAR ……… ii
DAFTAR ISI ………... v
DAFTAR GAMBAR ... ix
DAFTAR TABEL ... xiii
BAB I PENDAHULUAN 1.1 Latar Belakang ……… 1
1.2 Tujuan Penulisan ……… 2
1.3 Manfaat Penulisan ………. 3
1.4 Batasan Masalah ……… 3
1.5 Metode Penulisan ……… 4
1.6 Sistematika Penulisan ………. 5
BAB II MOTOR INDUKSI TIGA FASA 2.1 Umum ……… 8
2.2 Konstruski Motor Induksi Tiga Fasa ……… 8
2.2.1 Stator ……… 9
2.2.2 Rotor ………. 10
2.3 Prinsip Medan Putar ……… 12
2.4 Prinsip Kerja Motor Induksi Tiga Fasa ………. 16
2.6 Rangkaian Ekivalen Motor Induksi Tiga Fasa ………. 20
2.6.1 Rangkaian Ekivalen Stator ……… 20
2.6.2 Rangkaian Ekivalen Rotor ……… 22
2.6.3 Rangkaian Ekivalen Lengkap ……… 25
2.7 Aliran Daya dan Efisiensi Motor Induksi Tiga Fasa ………. 29
2.7.1 Aliran Daya ……… 29
2.7.2 Efisiensi ……… 32
2.8 Torsi Motor Induksi Tiga Fasa ………. 33
2.9 Desain Motor Induksi Tiga Fasa ……… 37
BAB III MOTOR INDUKSI TIGA FASA SEBAGAI GENERATOR INDUKSI DENGAN DAYA KELUARAN SATU FASA 3.1 Umum ……… 40
3.2 Keunggulan dan Kelemahan Penggunaan Motor Induksi Tiga Fasa Sebagai Generator ………. 41
3.3 Syarat-syarat Pengoperasian Motor Induksi Sebagai Generator … 43 3.3.1 nr > ns ……… 43
3.3.2 Adanya Sumber Daya Reaktif ………. 44
3.4 Kapasitor Pada Motor Induksi Tiga Fasa Sebagai Generator ……. 48
3.4.1 Umum ……… 48
3.4.2 Pemasangan Kapasitor………49
3.4.3 Perhitungan Besar Kapasitansi Kapasitor ………. 50
3.5 Prinsip Kerja Generator Induksi ……… 52
3.5.2 Proses Pengendalian Tegangan ……… 56
3.6 Pengaruh Pembebanan Resistif Terhadap Arus Eksitasi ………. 58 3.7 Generator Induksi Tiga Fasa Dengan Keluaran Satu Fasa ……… 60
3.7.1 Metode Untuk Memperoleh Keluaran Satu Fasa dari
Generator Induksi Tiga Fasa ……… 61
3.7.2 Rangkaian Hubungan Kapasitor dan Diagram Fasor
Generator Induksi Tiga Fasa Dengan Keluaran Satu Fasa … 61 3.8 Aliran Daya dan Efisiensi Generator Induksi Tiga Fasa ………… 65
3.8.1 Aliran Daya ……….. 65
3.8.2 Efisiensi ……… 66
BAB IV ANALISIS KARAKTERISTIK TEGANGAN DAN EFISIENSI
MOTOR INDUKSI TIGA FASA SEBAGAI GENERATOR
INDUKSI DENGAN KELUARAN SATU FASA
4.1 Umum ……….. 67
4.2 Peralatan yang Digunakan ……… 68
4.3 Penentuan Nilai Kapasitor Eksitasi Minimum ……….. 69 4.3.1 Percobaan Uji Beban Nol Motor Induksi Tiga Fasa ……… 69
4.3.1.1 Rangkaian Percobaan……… 69 4.3.1.2 Prosedur Percobaan ……….. 70 4.3.1.3 Data Hasil Percobaan……… 70
4.3.2 Perhitungan Nilai Kapasitansi Kapasitor
4.4 Percobaan Motor Induksi Tiga Fasa Sebagai Generator
Induksi dengan Keluaran Satu Fasa ………. 72
4.4.1 Percobaan Beban Nol ………... 72
4.4.1.1 Rangkaian Percobaan ………... 73
4.4.1.2 Prosedur Percobaan ………. 73
4.4.1.3 Data Hasil Percobaan ………... 75
4.4.2 Percobaan Berbeban Motor Induksi Tiga Fasa Sebagai Generator Induksi dengan Keluaran Satu Fasa ……… 75
4.4.2.1 Rangkaian Percobaan ………... 75
4.4.2.2 Prosedur Percobaan ………. 76
4.4.2.3 Data Hasil Percobaan ………... 76
4.5 Analisis Data Hasil Percobaan Motor Induksi Tiga Fasa Sebagai Generator Induksi Dengan Keluaran Satu Fasa ……… 78
4.5.1 Percobaan Beban Nol ……….. 78
4.5.2 Percobaan Berbeban ……… 79
BAB V KESIMPULAN DAN SARAN
V.1 Kesimpulan ………... 90V.2 Saran ………. 91
DAFTAR GAMBAR
Gambar 2.1. Penampang Stator dan Rotor Motor Induksi Tiga Fasa ………… 9
Gambar 2.2. (a) Lempengan Inti ………. 10
(b) Tumpukan Inti dengan Kertas Isolasi pada Beberapa Alurnya .. 10
(c) Tumpukan Inti dan Kumparan dalam Cangkang Stator ……… 10
Gambar 2.3. (a) Tampilan Close-Up Bagian Slip Ring Rotor Belitan ………….. 11
(b) Motor Induksi Tiga Fasa Rotor Belitan ……….. 11
Gambar 2.4. Skematik Diagram Motor Induksi Rotor Belitan ……… 11
Gambar 2.5. (a) Rotor Sangkar Tupai dan Bagian-bagiannya ……….. 12
(b) Motor Induksi Tiga Fasa Rotor Sangkar Tupai ………. 12
Gambar 2.6. Arus Tiga Fasa Setimbang ………. 13
Gambar 2.7. Diagram Fasor Fluksi Tiga Fasa Setimbang ... 13
Gambar 2.8. Medan Putar pada Motor Induksi Tiga Fasa ... 13
Gambar 2.9. Proses Induksi Medan Putar Stator pada Kumparan Rotor ... 18
Gambar 2.10. Konduktor Berarus Dalam Ruang Medan Magnet ... 19
Gambar 2.11. Rangkaian Ekivalen Stator per-Fasa Motor Induksi ... 22
Gambar 2.12. Rangkaian Ekivalen per-Fasa Rotor Motor Induksi Keadaan Diam ... 22
Gambar 2.13. Rangkaian Ekivalen Rotor per-Fasa Keadaan Berputar pada Slip = s dimana (i) menyatakan persamaan (2.16), (ii) menyatakan persamaan 2.17, (iii) menyatakan persamaan 2.19 ……… 25
Gambar 2.15. Rangkaian Ekivalen per-Fasa Motor Induksi dengan
Bagian Rangkaian Rotor Dinyatakan Terhadap Sisi Stator
(a) dengan Tahanan Varibel ... 27
(b) dengan Tahanan Varibel Sebagai Bentuk Analog Listrik dari Beban Mekanik ... 27
Gambar 2.16. Rangkaian Ekivalen per-Fasa Motor Induksi dengan Mengabaikan Rugi Inti ... 29
Gambar 2.17. Diagram Aliran Daya Aktif Motor Induksi Tiga Fasa ... 30
Gambar 2.18. Rangkaian Ekivalen per-Fasa Motor Induksi Tiga Fasa ... 35
Gambar 2.19. (a) Tegangan Ekivalen Thevenin Sisi Rangkaian Input ... 35
(b) Impedansi Ekivalen Sisi Rangkaian Input ... 35
(c) Hasil Rangkaian Ekivalen yang Disederhanakan dari Gambar 2.20. ... 36
Gambar 2.20. Kurva Karakteristik Torsi-Slip Motor Innduksi ... 37
Gambar 2.21. Karakteristik Torsi Kecepatan Motor Induksi pada Berbagai Desain ... 38
Gambar 3.1. Kurva Karakteristik Torsi-Kecepatan Motor Induksi pada Berbagai Daerah Operasi ... 44
Gambar 3.2. Generator Induksi Terhubung ke Sistem Jaringan Tiga Fasa ... 45
Gambar 3.3. Generator Induksi Penguatan Sendiri (Self-Excited) ... 46
Gambar 3.4. Kurva Magnetisasi Motor Induksi pada Keadaan Tanpa Beban ... 46
Gambar 3.6. Kurva Karakteristik Tegangan Terminal Generator
Induksi pada Keadaan Tanpa Beban ……… 47
Gambar 3.7. Hubungan Bintang (Y) dan Segitiga (∆) pada Kapasitor Eksitasi ... 49
Gambar 3.8. Skema Umum Prinsip Kerja Generator Induksi Penguatan Sendiri ... 53
Gambar 3.9. (a) Rangkaian Ekivalen per-Fasa Generator Induksi ... 54
(b) Rangkaian Penyederhanaan Rangkaian Ekivalen 3.9(a) ... 54
Gambar 3.10 Proses Pembangkitan Tegangan ... 55
Gambar 3.11 Diagram Vektor Tegangan Generator Induksi pada Pembebanan Resistif ……… 59
Gambar 3.12. Tegangan Fungsi Arus Eksitasi dengan Fakktor Kerja Satu ... 60
Gambar 3.13. Rangkaian Generator Induksi Tiga Fasa dengan Keluaran Satu Fasa ... 62
Gambar 3.14. Diagram Fasor Untuk Hubungan Satu Fasa ... 63
Gambar 3.15. Hubungan yang Salah pada Kapasitor Eksitasi ... 64
Gambar 3.16. Diagram Fasor dari Hubungan Kapasitor Eksitasi yang Salah ... 64
Gambar 3.17. Diagram Aliran Daya Aktif ... 65
Gambar 4.1. Rangkaian Percobaan Uji Beban Nol Motor Induksi Tiga Fasa … 69 Gambar 4.2. Rangkaian Percobaan Beban Nol Motor Induksi Tiga Fasa Sebagai Generator Induksi dengan Keluaran Satu Fasa ………. 73
Gambar 4.4. Grafik Pengaruh Perubahan Nilai Kapasitor Terhadap Tegangan
Keluaran pada Frekuensi 47 Hz dan 50 Hz,
Keadaan Beban Nol ………. 78
Gambar 4.5. Grafik Hubungan Pengaruh Perubahan Kapasitor Eksitasi Terhadap Tegangan Keluaran Generator Induksi ……… 81 Gambar 4.6. Grafik Hubungan Pengaruh Pembebanan Terhadap Tegangan
Keluaran Generator Induksi ……… 82 Gambar 4.7. Grafik Hubungan Pengaruh Perubahan Kecepatan Prime Mover
Terhadap Tegangan Keluaran Generator Induksi ……… 83 Gambar 4.8. Grafik Hubungan Pengaruh Pembebanan Terhadap Efisiensi
Generator Induksi ………. 84
Gambar 4.9. Grafik Hubungan Tegangan Keluaran Terhadap Efisiensi Generator Induksi ………... 85
DAFTAR TABEL
Tabel 4.1 Data Percobaan Uji Beban Nol Motor Induksi Tiga Fasa ………. 70 Tabel 4.2 Data Percobaan Beban Nol Motor Induksi Tiga Fasa Sebagai Generator
Induksi dengan Keluaran Satu Fasa ………. 75 Tabel 4.3 Data Hasil Percobaan Berbeban Motor Induksi Tiga Fasa Sebagai
Generator Induksi dengan Keluaran Satu Fasa ……… 77
ABSTRAK
Penggunaan motor induksi tiga fasa sebagai generator induksi dengan
keluaran satu fasa dapat dilakukan dengan menghubungkan kapasitor dengan
konfigurasi C-2C pada terminal mesin yang terhubung Δ (segitiga), dimana pada satu fasa tempat beban terhubung terpasang sebesar C, pada fasa yang lain sebesar 2C, dan pada fasa ketiga tidak ada. Percobaan dilakukan dengan membuat variasi terhadap kapasitansi kapasitor, kecepatan putaran generator, dan besar beban. Dari
percobaan diperoleh hasil, bahwa kapasitansi kapasitor dan kecepatan putaran generator sangat berpengaruh terhadap karakteristik tegangan keluaran disamping
BAB I
PENDAHULUAN
1.1 Latar Belakang
Permintaan kebutuhan listrik semakin lama selalu mengalami peningkatan, seiring dengan kemajuan ilmu dan teknologi yang berkembang pesat.
Sumber-sumber energi primer tak terbarukan seperti minyak bumi, gas bumi, dan batu bara yang digunakan untuk pembangkitan energi listrik semakin lama jumlahnya semakin menipis, sementara sumber energi primer lainnya seperti air, angin,
tenaga matahari, dan ombak laut ada dalam jumlah yang besar dan belum digunakan secara maksimal.
Penggunaan motor induksi sangkar tupai sebagai generator induksi penguatan sendiri yang digerakan oleh mikrohidro dan tenaga angin menjadi suatu alternatif untuk mengatasi kebutuhan energi listrik, terutama untuk pelistrikan
daerah-daerah terpencil. Ada beberapa keuntungan yang menjadi alasan digunakannya motor induksi sangkar tupai sebagai generator yaitu sederhana,
dimana generator induksi tidak memerlukan suplai DC sebagai sumber eksitasi, ketersediaannya di pasaran, harganya terjangkau, dan konstruksinya kokoh.
Pada daerah-daerah terpencil kebutuhan konsumen akan energi listrik
tidaklah begitu besar. Beban-beban konsumen yang terhubung ke pembangkit listrik umumnya adalah beban satu fasa seperti lampu sebagai penerangan dan
Motor induksi satu fasa dapat digunakan sebagai generator, tetapi
harganya lebih mahal dibanding motor induksi tiga fasa, umumnya hanya tersedia pada daya keluaran yang kecil, dan lebih rumit dalam penentuan dan pengaturan
kapasitor eksitasi yang dibutuhkan sehingga digunakanlah motor induksi tiga fasa sebagai generator induksi dengan keluaran satu fasa dengan menggunakan hubungan C-2C pada konfigurasi kapasitor eksitasi dimana motor induksi sendiri
pada belitan statornya terhubung segitiga (∆).
Pada generator induksi tiga fasa dengan keluaran satu fasa, pembebanan
yang terjadi sangat mempengaruhi nilai tegangan keluaran dan efisiensi, dan pembebanan yang besarnya jauh dibawah rating mesin dapat menyebabkan pemanasan yang berlebihan pada generator. Oleh karena itu, penulis dalam tugas
akhir ini berkesempatan untuk melakukan analisis terhadap karakteristik tegangan dan efisiensi generator induksi tiga fasa dengan keluaran satu fasa, dengan
pembebanan yang bersifat resistif, untuk mendapatkan karakteristik tegangan dan efisiensi maksimum generator dengan melakukan pengaturan pada besarnya nilai beban, nilai kapasitansi kapasitor, dan kecepatan putaran generator.
1.2 Tujuan Penulisan
Adapun tujuan penulisan tugas akhir ini adalah :
1. Untuk mengetahui pengaruh perubahan nilai beban, kapasitansi
kapasitor, dan kecepatan putaran generator terhadap karakteristik
2. Untuk mengetahui kondisi, bilamana dan bagaimana generator induksi
memiliki efisiensi maksimum, dengan melakukan pengaturan-pengaturan pada nilai beban, kapasitansi kapasitor, dan kecepatan
putaran generator.
1.3 Manfaat Penulisan
Penulisan tugas akhir ini diharapkan bermanfaat untuk :
1. Mendapatkan informasi mengenai pengaruh perubahan nilai beban,
kapasitansi kapasitor, dan kecepatan putaran generator terhadap karakteristik tegangan dan efisiensi generator.
2. Memberikan informasi kepada penulisan dan pembaca mengenai
bagaimana dan bilamana generator memiliki efisiensi yang maksimum, dengan melakukan pengaturan-pengaturan terhadap nilai beban,
kapasitansi kapasitor, dan kecepatan putaran generator.
3. Menambah aplikasi-aplikasi mengenai penggunaan motor induksi
sebagai generator pada Laboratorium Konversi Energi Listrik
Departemen Teknik Elektro USU.
1.4 Batasan Masalah
Agar tujuan penulisan tugas akhir ini sesuai dengan yang diharapkan serta terfokus pada judul dan bidang yang telah disebutkan di atas, maka penulis
menetapkan suatu batasan masalah sebagai berikut :
1. Analisis generator induksi dilakukan dalam kondisi stabil (steady
2. Motor induksi yang digunakan ialah motor induksi tiga fasa rotor
sangkar tupai (squirrel cage) yang dihubungkan segitiga (∆), dan kapasitor eksitasi menggunakan hubungan C-2C.
3. Beban yang digunakan bersifat resistif.
4. Generator induksi beroperasi sendiri (stand alone) dan tidak
membahas hubungan pararel ataupun interkoneksi dengan sistem /
jaringan.
5. Tidak membahas tentang sistem yang memproteksi generator .
6. Tidak membahas mengenai keadaan mesin tidak seimbang, beserta
komponen-komponen simetris.
7. Pengambilan data dan analisis perhitungan dilakukan berdasarkan
peralatan yang tersedia di Laboratorium Konversi Energi Listrik Departemen Teknik Elektro USU.
1.5 Metode Penulisan
Untuk dapat menyelesaikan tugas akhir ini maka penulis menerapkan
beberapa metode studi, yaitu : 1. Studi literatur
Yaitu dengan membaca dan memahami teori-teori yang berkaitan dengan permasalahan yang dibahas pada tugas akhir ini dari buku-buku referensi baik yang dimiliki oleh penulis ataupun yang ada di
2. Studi lapangan
Yaitu dengan melaksanakan percobaan untuk pengambilan data di Laboratorium Konversi Energi Listrik Departemen Teknik Elektro
USU. Percobaan yang dilakukan antara lain percobaan beban nol motor induksi tiga fasa, percobaan beban nol dan berbeban motor induksi tiga fasa sebagai generator induksi dengan keluaran satu fasa. 3. Studi bimbingan
Yaitu dengan melaksanakan diskusi mengenai segala permasalahan
yang timbul mengenai tugas akhir ini dengan dosen pembimbing yang telah ditunjuk oleh pihak Departemen Teknik Elektro USU, asisten Laboratorium Konversi Energi Listrik Departemen Teknik Elektro
USU, dan teman-teman sesama mahasiswa.
1.6 Sistematika Penulisan
Tugas akhir ini disusun berdasarkan sistematika penulisan sebagai berikut :
BAB I PENDAHULUAN
Bagaian ini berisikan latar belakang, tujuan penulisan, manfaat
penulisan, batasan masalah, dan sistematika penulisan.
BAB II MOTOR INDUKSI TIGA FASA
rangkaian ekivalen, torsi, aliran daya, efisiensi, dan desain motor
induksi tiga fasa.
BAB III MOTOR INDUKSI TIGA FASA SEBAGAI GENERATOR
INDUKSI DENGAN KELUARAN SATU FASA
Bab ini menjelaskan mengenai penggunaan motor induksi sebagai generator secara umum, Keuntungan Penggunaan Motor Induksi
Sebagai Generator, Syarat-syarat Motor Induksi Dioperasikan Sebagai Generator, Kapasitor Pada Motor Induksi Tiga Fasa Sebagai Generator, Prinsip Kerja Pembangkitan Tegangan dan proses
pengendalian tegangan Generator Induksi, Pengaruh Pembebanan Resistif Terhadap Arus Aksitasi, Metode Untuk Memperoleh
Keluaran Satu Fasa dari Generator Induksi Tiga Fasa, Rangkaian Hubungan Kapasitor dan Diagram fasor Generator Induksi Tiga Fasa Dengan Keluaran Satu Fasa, dan Aliran Daya dan Efisiensi Pada
Generator Induksi.
BAB IV ANALISIS KARAKTERISTIK TEGANGAN DAN EFISIENSI
MOTOR INDUKSI TIGA FASA SEBAGAI GENERATOR
INDUKSI DENGAN KELUARAN SATU FASA
Bab ini menjelaskan mengenai pengambilan data melalui percobaan yang dilakukan di Laboratorium Konversi Energi Listrik F.T. USU
efisiensi generator terhadap perubahan besar beban, kecepatan putaran
generator induksi, dan kapasitansi kapasitor.
BAB V KESIMPULAN DAN SARAN
Bab ini berisikan kesimpulan yang didapat dari hasil analisis data
yang dilakukan dan saran untuk kelanjutan kemajuan perkembangan penelitian dengan topik permasalahan yang serupa.
BAB II
MOTOR INDUKSI TIGA FASA
2.1 Umum
Motor induksi tiga fasa merupakan motor listrik arus bolak-balik yang
paling banyak digunakan dalam dunia industri. Dinamakan motor induksi karena pada kenyataannya arus rotor motor ini bukan diperoleh dari suatu sumber listrik, tetapi merupakan arus yang terinduksi sebagai akibat adanya perbedaan relatif
antara putaran rotor dengan medan putar. Dalam kenyataannya, motor induksi dapat diperlakukan sebagai sebuah transformator, yaitu dengan kumparan stator
sebagai kumparan primer yang diam, sedangkan kumparan rotor sebagai kumparan sekunder yang berputar.
Motor induksi tiga fasa berputar pada kecepatan yang pada dasarnya
adalah konstan, mulai dari tidak berbeban sampai mencapai keadaan beban penuh. Kecepatan putaran motor ini dipengaruhi oleh frekuensi, dengan demikian
pengaturan kecepatan tidak dapat dengan mudah dilakukan terhadap motor ini. Walaupun demikian, motor induksi tiga fasa memiliki beberapa keuntungan, yaitu sederhana, konstruksinya kokoh, harganya relatif murah, mudah dalam melakukan
perawatan, dan dapat diproduksi dengan karakteristik yang sesuai dengan kebutuhan industri.
2.2 Konstruksi Motor Induksi Tiga Fasa
Sebuah motor induksi tiga fasa memiliki konstruksi yang hampir sama
stator yang merupakan bagian yang diam, dan rotor sebagai bagian yang berputar
sebagaimana diperlihatkan pada gambar 2.1. Antara bagian stator dan rotor dipisahkan oleh celah udara yang sempit, dengan jarak berkisar dari 0,4 mm
sampai 4 mm.
Gambar 2.1. Penampang Stator dan Rotor Motor Induksi Tiga Fasa
2.2.1 Stator
Stator terdiri atas tumpukan laminasi inti yang memiliki alur yang menjadi tempat kumparan dililitkan yang berbentuk silindris. Alur pada tumpukan laminasi inti diisolasi dengan kertas (Gambar 2.2.(b)). Tiap elemen laminasi inti
dibentuk dari lempengan besi (Gambar 2.2.(a)). Tiap lempengan besi tersebut memiliki beberapa alur dan beberapa lubang pengikat untuk menyatukan inti. Tiap
kumparan tersebar dalam alur yang disebut belitan fasa dimana untuk motor tiga fasa, belitan tersebut terpisah secara listrik sebesar 120o. Kawat kumparan yang digunakan terbuat dari tembaga yang dilapis dengan isolasi tipis. Kemudian
tumpukan inti dan belitan stator diletakkan dalam cangkang silindris (Gambar 2.2.(c)). Berikut ini contoh lempengan laminasi inti, lempengan inti yang telah
(a) (b) (c)
Gambar 2.2. Komponen Stator Motor Induksi Tiga Fasa :
(a) Lempengan Inti,
(b) Tumpukan Inti dengan Kertas Isolasi pada Beberapa Alurnya, (c) Tumpukan Inti dan Kumparan dalam Cangkang Stator.
2.2.2 Rotor
Berdasarkan jenis rotornya, motor induksi tiga fasa dapat dibedakan
menjadi dua jenis, yang juga akan menjadi penamaan untuk motor tersebut, yaitu rotor belitan (wound rotor) dan rotor sangkar tupai (squirrel cage rotor).
Jenis rotor belitan terdiri dari satu set lengkap belitan tiga fasa yang
merupakan bayangan dari belitan pada statornya. Belitan tiga fasa pada rotor belitan biasanya terhubung Y, dan masing-masing ujung dari tiga kawat belitan
fasa rotor tersebut dihubungkan pada slip ring yang terdapat pada poros rotor (gambar 2.3(a)). Belitan-belitan rotor ini kemudian dihubung singkatkan melalui sikat (brush) yang menempel pada slip ring (perhatikan gambar 2.4), dengan
(a) (b)
Gambar 2.3. (a) Tampilan Close-Up Bagian Slip Ring Rotor Belitan
(b) Motor Induksi Tiga Fasa Rotor Belitan
Gambar 2.4. Skematik Diagram Motor Induksi Rotor Belitan
Dari gambar 2.4. dapat dilihat bahwa semata-mata keberadaan slip ring dan sikat hanyalah sebagai penghubung belitan rotor ke tahanan luar (exsternal
resistance). Keberadaan tahanan luar disini berfungsi pada saat pengasutan yang
berguna untuk membatasi arus mula yang besar. Tahanan luar ini kemudian secara perlahan dikurangi sampai resistansinya nol sebagaimana kecepatan motor
bertambah mencapai kecepatan nominalnya. Ketika motor telah mencapai kecepatan nominalnya, maka tiga buah sikat akan terhubung singkat tanpa tahanan
luar sehingga rotor belitan akan bekerja seperti halnya rotor sangkar tupai.
terdiri dari tumpukan lempengan besi tipis yang dilaminasi dan batang konduktor
yang mengitarinya (perhatikan gambar 2.5(a)). Tumpukan besi yang dilaminasi disatukan untuk membentuk inti rotor. Alumunium (sebagai batang konduktor)
dimasukan ke dalam slot dari inti rotor untuk membentuk serangkaian konduktor yang mengelilingi inti rotor. Rotor yang terdiri dari sederetan batang-batang konduktor yang terletak pada alur-alur sekitar permukaan rotor, ujung-ujungnya
dihubung singkat dengan menggunakan cincin hubung singkat (shorting ring) atau disebut juga dengan end ring.
(a) (b)
Gambar 2.5. (a) Rotor Sangkar Tupai dan Bagian-bagiannya
(b) Motor Induksi Tiga Fasa Rotor Sangkar Tupai
2.3 Prinsip Medan Putar
Pada saat kita menghubungkan sumber tiga fasa ke terminal tiga fasa motor induksi, maka arus bolak-balik sinusoidal IR, IS, IT akan mengalir pada
belitan stator. Arus-arus ini akan menghasilkan ggm (gaya gerak magnet), yang mana pada kumparan akan menghasilkan fluks magnetik yang berputar sehingga
tidak diam pada posisi tertentu, tetapi meneruskan pergeseran posisinya disekitar
stator.
Untuk melihat bagaimana medan putar dibangkitkan, maka dapat diambil
contoh pada motor induksi tiga fasa dengan jumlah kutub dua. Fluks yang dihasilkan oleh arus-arus bolak-balik pada belitan stator adalah :
ΦR = Φm sin ωt ………. (2.1a)
ΦS = Φm sin (ωt – 120o)……… (2.1b)
ΦT = Φm sin (ωt – 240o)……… (2.1c)
Gambar 2.6. Gambar 2.7.
Arus Tiga Fasa Setimbang Diagram Fasor Fluksi Tiga Fasa Setimbang
(1) (2) (3) (4)
Gambar 2.8. Medan Putar Pada Motor Induksi Tiga Fasa
(a). Pada keadaan 1 (gambar 2.6 dan 2.8), ωt = 0 ; arus dalam fasa R bernilai nol
sedangkan besarnya arus pada fasa S dan fasa T memiliki nilai yang sama dan arahnya berlawanan. Dalam keadaan seperti ini arus sedang mengalir ke
luar dari konduktor sebelah atas dan memasuki konduktor sebelah bawah. Sementara resultan fluks yang dihasilkan memiliki besar yang konstan yaitu sebesar 1,5 Φm dan dibuktikan sebagai berikut :
(b). Pada keadaan 2, arus bernilai maksimum negatif pada fasa S, sedangkan
pada R dan fasa T bernilai 0,5 maksimum pada fasa R dan fasa T, dan pada
saat ini ωt = 30o
, oleh karena itu fluks yang diberikan oleh masing-masing fasa :
Dari gambar diagram fasor tersebut dapat dilihat bahwa resultan fluks
(c). Pada keadaan ini ωt = 60o, arus pada fasa R dan fasa T memiliki besar yang
sama dan arahnya berlawanan ( 0,866 Φm ), oleh karena itu fluks yang
diberikan oleh masing-masing fasa :
ΦR = Φm sin ( 60o ) =
Dari gambar diagram fasor tersebut dapat dilihat bahwa resultan fluks berpindah sejauh 60o dari posisi pertama.
(d). Pada keadaan ini ωt = 90o, arus pada fasa R maksimum ( positif), dan arus
2.4 Prinsip Kerja Motor Induksi Tiga Fasa
Pada saat terminal tiga fasa stator motor induksi diberi suplai tegangan tiga fasa seimbang, maka akan mengalir arus pada konduktor di tiap belitan fasa
stator dan akan menghasilkan fluksi bolak-balik . Amplitudo fluksi per fasa yang dihasilkan berubah secara sinusoidal dan menghasilkan fluks resultan (medan putar) dengan magnitud yang nilainya konstan yang berputar dengan kecepatan
sinkron :
ns = 120 ……… (2.2)
dimana,
ns = kecepatan sinkron/medan putar (rpm)
f = frekuensi sumber daya (Hz) P = jumlah kutub motor induksi
Medan putar akan terinduksi melalui celah udara menghasilkan ggl induksi
(ggl lawan) pada belitan fasa stator sebesar :
……… (2.3)
untuk nilai maksimum sin = 1
Jadi
dimana,
e1 = ggl induksi sesaat stator/fasa (Volt)
Em1 = ggl induksi maksimum stator/fasa (Volt)
E1 = ggl induksi efektif stator/fasa (Volt)
f1 = frekuensi saluran (Hz)
N1 = jumlah lilitan kumparan stator/fasa
= fluks magnetik maksimum (Weber)
Medan putar tersebut juga akan memotong konduktor-konduktor belitan rotor yang diam (perhatikan gambar 2.9). Hal ini terjadi karena adanya perbedaan relatif antara kecepatan fluksi yang berputar dengan konduktor rotor yang diam, yang disebut juga dengan slip (s).
s =
………. (2.5)Akibat adanya slip, maka ggl (gaya gerak listrik) akan terinduksi pada konduktor-konduktor rotor sebesar :
……… (2.6)
atau ……… (2.7)
dimana :
e2 = ggl induksi sesaat pada saat rotor diam/fasa (Volt)
E2 = ggl induksi efektif pada saat rotor diam/fasa (Volt)
f2 = frekuensi arus rotor (Hz)
N2 = jumlah lilitan pada kumparan rotor/fasa
Gambar 2.9. Proses Induksi Medan Putar Stator pada Kumparan Rotor
Karena belitan rotor merupakan rangkaian tertutup, baik melalui cincin ujung (end ring) ataupun tahanan luar, maka arus akan mengalir pada
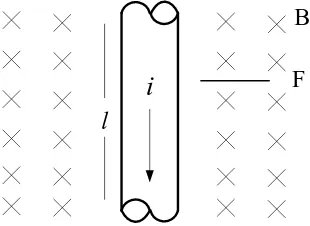
konduktor-konduktor rotor. Karena konduktor-konduktor-konduktor-konduktor rotor yang mengalirkan arus ditempatkan di dalam daerah medan magnet yang dihasilkan stator, maka akan terbentuklah gaya mekanik (gaya lorentz) pada konduktor-konduktor rotor. Hal ini
sesuai dengan hukum gaya lorentz (perhatikan gambar 2.10) yaitu bila suatu konduktor yang dialiri arus berada dalam suatu kawasan medan magnet, maka
konduktor tersebut akan mendapat gaya elektromagnetik (gaya lorentz) sebesar : F = B.i.l.sin θ ……… (2.8) dimana,
F = gaya yang bekerja pada konduktor (Newton)
B = kerapatan fluks magnetik (Wb/m2) i = besar arus pada konduktor (A)
l = panjang konduktor (m)
θ = sudut antara konduktor dan vektor kerapatan fluks magnetik
Arah dari gaya elektromagnetik tersebut dapat dijelaskan oleh kaidah
tangan kanan (right-hand rule). Kaidah tangan kanan menyatakan, jika jari telunjuk menyatakan arah dari vektor arus i dan jari tengah menyatakan arah dari
vektor kerapatan fluks B, maka ibu jari akan menyatakan arah gaya F yang bekerja pada konduktor tersebut.
Gaya F yang dihasilkan pada konduktor-konduktor rotor tersebut akan
menghasilkan torsi (τ). Bila torsi mula yang dihasilkan pada rotor lebih besar
daripada torsi beban (τ0 > τb), maka rotor akan berputar searah dengan putaran
medan putar stator.
i
FB
l
Gambar 2.10. Konduktor Berarus Dalam Ruang Medan Magnet
Seperti yang telah disebutkan di atas, motor akan tetap berputar bila
kecepatan medan putar lebih besar dari pada kecepatan putaran rotor (ns > nr). Apabila ns = nr, maka tidak ada perbedaan relatif antara kecepatan medan putar (ns) dengan putaran rotor (nr), atau dengan kata lain slip (s) adalah nol. Hal ini
menyebabkan tidak adanya ggl terinduksi pada kumparan rotor sehingga tidak ada arus yang mengalir, dengan demikian tidak akan dihasilkan gaya yang dapat
2.5 Frekuensi Rotor
Frekuensi rotor tidak persis sama seperti frekensi stator. Jika rotor motor terkunci sehingga tidak dapat bergerak nr = 0 rpm, maka rotor akan mempunyai
frekuensi yang sama seperti stator f2 = f1, dimana pada kondisi ini slip s = 1. Akan tetapi, jika rotor berputar pada kecepatan (mendekati) sinkron nr ≈ ns, maka frekuensi rotor akan menjadi (mendekati) nol f2≈ 0, dimana pada kondisi ini slip
s ≈ 0.
Dari pernyataan di atas, maka dapat dibuat hubungan persamaan frekuensi
rotor f2 terhadap frekuensi stator f1 sebagai berikut,
f2 = sf1 ………. (2.9)
Dengan mensubstitusikan persamaan (2.5) ke dalam persamaan (2.9), maka
didapat,
f2 = f1 ……… (2.10)
Dari persamaan (2.2) diketahui bahwa ns = 120f1/P, maka
……… (2.11)
2.6 Rangkaian Ekivalen Motor Induksi Tiga Fasa
Telah disebutkan sebelumnya bahwa motor induksi identik dengan sebuah transformator, tentu saja dengan demikian rangkaian ekivalen motor induksi sama dengan rangkaian ekivalen transformator. Perbedaan yang ada hanyalah, karena
menghasilkan daya mekanik. Awal dari rangkaian ekivalen motor induksi
dihasilkan dengan cara yang sama sebagaimana halnya pada transformator. Semua parameter-parameter rangkaian ekivalen yang akan dijelaskan berikut
mempunyai nilai-nilai perfasa.
2.6.1 Rangkaian Ekivalen Stator
Gelombang fluks pada celah udara yang berputar dengan kecepatan
sinkron membangkitkan ggl lawan tiga fasa yang seimbang di dalam fasa-fasa
stator. Besarnya tegangan terminal stator berbeda dengan ggl lawan sebesar
jatuh tegangan pada impedansi bocor stator , sehingga dapat
dinyatakan dengan persamaan :
………(2.12)
dimana,
= tegangan terminal stator (Volt)
= ggl lawan yang dihasilkan oleh fluks celah udara resultan (Volt)
= arus stator (Ampere)
= tahanan efektif stator (Ohm)
= reaktansi bocor stator (Ohm)
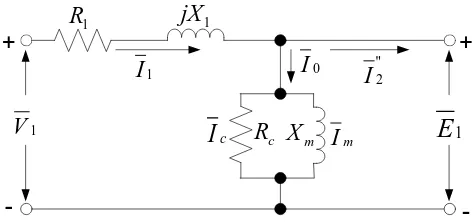
Sebagaimana halnya pada transformator, arus stator terdiri dari dua
komponen. Komponen pertama adalah komponen beban yang akan
menghasilkan fluks yang akan melawan fluks yang dihasilkan oleh arus rotor.
Komponen lainnya yaitu , arus ini terbagi lagi menjadi dua komponen yaitu
yang menghasilkan fluks magnetik pada inti dan celah udara yang tertinggal
dari . Sehingga dapat dibuat rangkaian ekivalen pada stator, seperti gambar 2.11
berikut ini.
Gambar 2.11. Rangkaian Ekivalen Stator per-Fasa Motor Induksi
2.6.2 Rangkaian Ekivalen Rotor
Pada saat rotor dalam kondisi diam yaitu kondisi sesaat rotor sebelum
bergerak atau pada saat rotor terkunci (locked-rotor), slip s = 1 dimana kecepatan rotor nr = 0, karena seluruh belitan rotor dihubung-singkat, maka akan mengalir
arus akibat ggl induksi pada rotor. Sehingga dapat dituliskan persamaannya
sebagai berikut :
……… (2.13)
dan rangkaian ekivalen rotor perfasa dalam keadaan diam (s = 1) digambarkan seperti gambar 2.12. di bawah ini.
2
dimana,
= arus rotor dalam keadaan diam (Ampere)
= ggl induksi rotor dalam keadaan diam (Volt)
= resistansi rotor (Ohm)
= reaktansi rotor dalam keadaan diam (Ohm)
Ketika rotor berputar, maka ggl rotor perfasa dan reaktansi rotor perfasa
masing-masingnya dipengaruhi oleh frekuensi (untuk dapat melihat
persamaan (2.7), sementara reaktansi rotor dapat dijelaskan dari persamaan di bawah ini dimana nilainya tergantung dari induktansi dan frekuensi rotor.
= ωrL2 = 2πf2L2 ………. (2.14)
dengan f2 = sf,
maka = 2πsfL2
= s(2πfL2)
= sX2 ………(2.15)
Dengan demikian dan X2 nilainya bergantung terhadap slip s, sementara
resistansi rotor perfasa tidak dipengaruhi oleh frekuensi sehingga tidak
tergantung terhadap nilai slip s. Sehingga dari persamaan (2.13) di atas dapat
dibuat persamaannya menjadi :
……… (2.16)
Dengan membagi pembilang dan penyebut pada persamaan (2.16) di atas dengan
s, maka
Perhatikan bahwa magnitud dan fasa dari pada persamaan (2.16) dan
(2.17) adalah sama. Namun demikian, terdapat sebuah perbedaan signifikan
diantara dua persamaan ini. Pada persamaan (2.16) ggl berada pada
frekuensi-slip, ketika dibagi dengan memberikan arus frekuensi-slip. Tetapi pada
persamaan (2.17), berada pada frekuensi-saluran ketika dibagi dengan +
memberikan arus frekuensi-saluran.
Nilai dari sekarang lebih besar dari R2 dikarenakan s memiliki nilai
dalam bentuk pecahan. Untuk itu, dapat dipecah menjadi sebuah bagian yang
bernilai konstan R2 dan sebuah bagian yang variabel ( ), yaitu
……… (2.18)
Bagian pertama R2 merupakan tahanan rotor/fasa dan mewakilkan rugi
tembaga (Cu loss). Bagian kedua
−1 1
s merupakan sebuah beban
tahanan-variabel. Daya yang dikirim ke beban ini mewakilkan daya mekanik keseluruhan
yang dibangun di rotor. Untuk itu beban mekanik pada motor dapat digantikan
dengan sebuah beban tahanan-variabel dengan nilai R2
sebagai tahanan beban RL.
2
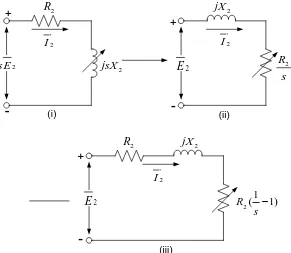
Dari persamaan (2.16), (2.17) dan (2.19) di atas, maka dapat digambarkan
rangkaian ekivalen rotor seperti gambar 2.13. di bawah ini.
Gambar 2.13. Rangkaian Ekivalen Rotor per-Fasa
Keadaan Berputar pada Slip = s dimana (i) menyatakan persamaan 2.16, (ii) menyatakan persamaan 2.17, (iii) menyatakan persamaan 2.19
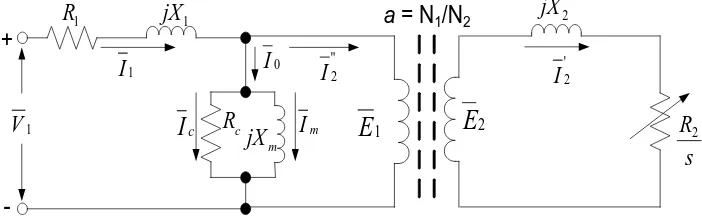
2.6.3 Rangkaian Ekivalen Lengkap
Dari penjelasan mengenai rangkaian ekivalen pada stator dan rotor di atas, maka dapat dibuat rangkaian ekivalen perfasa motor induksi dengan model transformator, dengan rasio perbandingan ‘a’ antara stator dan rotor. Perhatikan
1
Gambar 2.14. Rangkaian Ekivalen Per-Fasa Motor Induksi Model Transformator
Untuk menghasilkan rangkaian ekivalen per-fasa akhir dari motor induksi, penting untuk menyatakan bagian rotor dari model rangkaian ekivalen gambar
2.14 di atas terhadap sisi stator. Pada transformator yang umum, tegangan, arus, dan impedansi pada sisi sekunder, dapat dinyatakan terhadap sisi primer dengan
menggunakan rasio perbandingan belitan dari transformator tersebut. Dengan mengasumsikan jenis rotor yang digunakan adalah jenis rotor belitan dan terhubung bintang ( Y ), yang mana motor dengan rotor jenis ini sangat mirip
dengan transformator, maka kita dapat juga menyatakan sisi rotor terhadap sisi stator seperti halnya pada transformator.
Jika rasio perbandingan efektif dari sebuah motor induksi adalah a (= N1/N2), maka pentransformasian tegangan rotor terhadap sisi stator menjadi:
………. (2.20)
untuk arus rotor :
……… (2.21)
dan untuk impedansi rotor :
= = = ……… (2.22a)
c
dengan penguraian lebih lanjut :
= a2 R2 ………. (2.22b)
= a2 X2 ………. (2.22c)
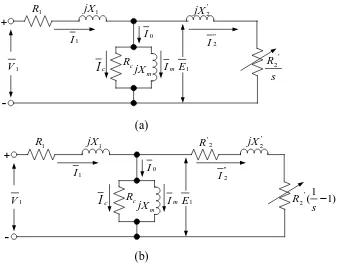
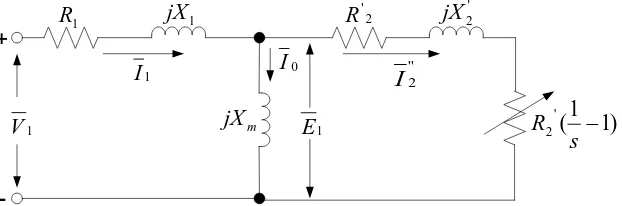
Dari persamaan (2.18), (2.19), dan (2.22) di atas, maka dapat kita
gambarkan rangkaian ekivalen per-fasa motor induksi sebagai kelanjutan dari gambar 2.14, dimana disini bagian rangkaian rotor telah dinyatakan terhadap
bagian stator. Rangkaian ekivalen tersebut dapat dilihat pada gambar 2.15(a), sedangkan pada gambar 2.15(b) merupakan modifikasi dari gambar 2.15(a)
dimana adanya R2
s menyatakan resistansi variabel sebagai analog listrik
dari beban mekanik variabel.
(a)
(b)
Gambar 2.15. Rangkaian Ekivalen per-Fasa Motor Induksi dengan Bagian
(a) dengan tahanan variabel
s R2'
(b) dengan tahanan variabel 2'(1−1)
s
R sebagai bentuk analog
listrik dari beban mekanik
Pada transformator, analisis rangkaian ekivalen dilakukan dengan
mengabaikan cabang pararel yang terdiri dari Rc dan Xm atau dengan memindahkan cabang pararel ke terminal primer. Bagaimanapun, penyederhanaan ini tidak diperbolehkan pada rangkaian ekivalen motor induksi. Ini disebabkan
kenyataan bahwa arus penguatan pada transformator bervariasi dari 2% sampai 6% dari arus beban penuh dan per unit reaktansi bocor primer kecil. Tetapi pada
motor induksi, arus penguatan bervariasi dari 30% sampai 50% dari arus beban penuh dan per unit reaktansi bocor stator adalah lebih tinggi. Dengan demikian kesalahan yang besar akan terjadi dalam penentuan daya dan torsi, dalam hal cabang pararel diabaikan, atau dihubungkan pada terminal stator.
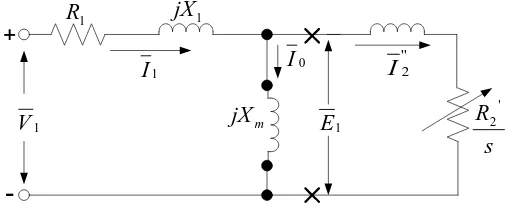
Dibawah kondisi kerja normal pada tegangan dan frekuensi konstan, rugi inti pada motor induksi biasanya juga konstan. Dalam pandangan pada kenyataan
ini, tahanan rugi inti Rc yang mewakili rugi inti motor, dapat dihilangkan dari rangkaian ekivalen motor induksi pada gambar 2.15(b). Akan tetapi, untuk menentukan daya poros atau torsi poros, rugi inti yang konstan harus
diikut-sertakan dalam pertimbangan, bersama dengan gesekan, rugi-rugi beban buta (stray-load losses) dan angin. Dengan penyederhanaan ini, maka dapat
0
Gambar 2.16. Rangkaian Ekivalen per-Fasa Motor Induksi dengan
Mengabaikan Rugi Inti
2.7 Aliran Daya dan Efisiensi Motor Induksi Tiga Fasa
2.7.1 Aliran Daya
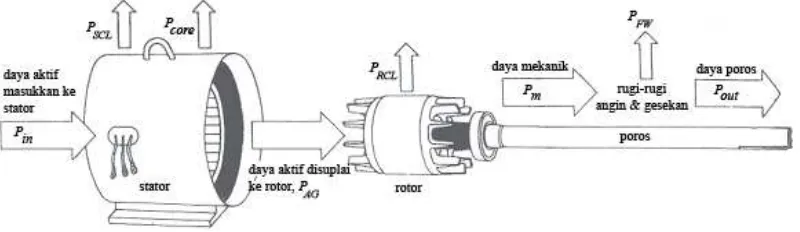
Untuk melihat dan memahami bagaimana energi listrik dikonversikan menjadi energi mekanik pada motor induksi tiga fasa, akanlah lebih mudah jika kita merunut aliran daya aktif yang mengalir pada mesin tersebut. Dari gambar
2.17 dapat kita lihat bahwa, sebelum akhirnya daya masukan Pin dikonversikan menjadi daya keluaran Pout dalam bentuk daya mekanik, terdapat bannyak
rugi-rugi pada motor yang akan mengurangi besar daya masukan yang akan dikonversikan menjadi daya keluaran (mekanik). Rugi-rugi (losses) tersebut ialah :
1. Rugi-rugi tetap (fixed losses) Rugi-rugi ini terdiri dari :
Rugi-rugi inti stator (stator core losses)
Pcore = = 3 ……… (2.23)
2. Rugi-rugi variabel (variable losses)
Rugi-rugi ini terdiri dari :
Rugi-rugi tembaga stator (stator coper losses)
PSCL = ………. (2.24)
Rugi-rugi tembaga rotor (rotor coper losses)
PRCL = ………. (2.25)
Gambar 2.17. Diagram Aliran Daya Aktif Motor Induksi Tiga Fasa
dimana :
Pin = daya aktif masukan ke stator (Watt) PSCL = rugi-rugi tembaga stator (Watt)
Pcore = rugi-rugi inti stator (Watt) PAG = daya celah udara (Watt) PRCL = rugi-rugi tembaga rotor (Watt)
Pm = daya yang dikonversikan dari bentuk listrik ke mekanik (Watt) PFW = rugi-rugi gesek dan angin (Watt)
Pout = daya poros/keluaran (Watt)
Daya masukan tiga fasa disuplai ke stator melalui terminal tiga fasa. Dikarenakan rugi-rugi tembaga stator, maka daya sebesar PSCL didisipasikan
inti stator, yaitu sebagai rugi-rugi inti besi. Daya aktif sisa PAG ditransfer ke rotor
melalui celah udara dengan induksi elektromagnetik. Sehingga daya celah udara dapat ditentukan sebagai berikut :
PAG = Pin – PSCL – Pcore ……… (2.26) Dengan memperhatikan secara cermat rangkaian ekivalen pada rotor (gambar 2.15(a)), satu-satunya elemen yang dapat mengkonsumsi daya celah-udara PAG adalah tahanan . Untuk itu daya celah udara dapat kita tuliskan
dengan persamaan :
……… (2.27)
Dengan adanya rugi-rugi I2R pada rotor, maka bagian daya PRCL didisipasikan sebagai panas, dan sisanya akhirnya terdapat dalam bentuk daya
mekanik Pm. Adapun rugi-rugi tahanan aktual rangkaian rotor (gambar 2.13.) diberikan oleh persamaan :
……… (2.28)
Karena daya tidak berubah besarnya ketika rangkaian rotor dinyatakan
terhadap sisi stator, dalam bentuk rangkaian ekivalen transformator ideal, maka rugi-rugi tembaga rotor dapat juga dinyatakan dengan :
………. (2.29)
Setelah rugi-rugi tembaga stator, rugi-rugi inti stator, dan rugi-rugi
tembaga rotor dikurangi dengan daya masukan motor, maka daya yang tertinggal adalah yang dikonversikan kebentuk mekanik. Daya mekanik yang dibangun ini
diberikan oleh persamaan :
Pm = PAG – PRCL ……… (2.30)
Pm =
Dari persamaan (2.27) dan (2.29) dapat dilihat bahwa rugi-rugi tembaga rotor PRCL dan daya celah udara PAG memiliki hubungan sebagai berikut :
PRCL = s.PAG ………. (2.32)
Untuk itu, semakin kecil slip motor, semakin kecil juga rugi-rugi pada rotor. Perhatikan juga, bahwa, jika rotor tidak berputar slip s = 1 dan daya celah
udara seluruhnya dipakai pada rotor. Karena Pm = PAG – PRCL, ini juga memberikan hubungan yang lainnya diantara daya celah udara dan daya yang
dikonversikan dari bentuk listrik ke mekanik :
Pm = PAG – PRCL ……… (2.33)
Pm = PAG – s.PAG
Pm = (1 – s) PAG ……… (2.34)
Sehingga jika rugi-rugi gesekan dan angin PFW dan rugi-rugi lainnya Pmisc
(stray load losses) diketahui, dan dikurangi dengan daya mekanik Pm, maka akan didapat daya keluaran Pout atau daya yang memutar poros.
Pout = Pm – PFW – Pmisc ……… (2.35)
2.7.2 Efisiensi
Efisiensi motor induksi adalah ukuran keefektifan motor induksi untuk mengubah energi listrik menjadi energi mekanik yang dinyatakan sebagai perbandingan antara daya keluaran dan daya masukan dan biasanya dinyatakan
Loss
Pada beban-beban dengan nilai yang kecil, rugi-rugi tetap lebih besar dibandingkan dengan keluaran, untuk itu efisiensi yang dihasilkan rendah.
Sebagaimana beban bertambah, efisiensi juga bertambah dan menjadi maksimum ketika rugi inti dan rugi variabel adalah sama. Efisiensi maksimum terjadi sekitir 80 – 95 % dari rating output mesin, dimana nilai yang lebih tinggi terdapat pada
motor-motor yang besar. Jika beban yang diberikan melebihi beban yang menghasilkan efisiensi maksimum, maka rugi-rugi beban bertambah lebih cepat
daripada output, konsekuensinya efisiensi berkurang.
Pada motor induksi pengukuran efisiensi motor induksi ini sering dilakukan dengan beberapa cara seperti:
- Mengukur langsung daya listrik masukan dan daya mekanik keluaran - Mengukur langsung seluruh rugi-rugi dan daya masukan
- Mengukur setiap komponen rugi-rugi dan daya masukan,
dimana pengukuran daya masukan tetap dibutuhkan pada ketiga cara di atas.
2.8 Torsi Motor Induksi Tiga Fasa
Torsi induksi τind yang terdapat pada sebuah mesin didefinisikan sebagai
torsi yang dibangkitkan oleh konversi internal listrik ke mekanik. Torsi induksi ini diberikan oleh persamaan :
τind = ………. (2.37)
dengan mensubstitusikan persamaan (2.34) dan diktehui bahwa ,
τind =
τind = ……… (2.38)
dimana,
= kecepatan sudut rotor (rad/s)
= kecepatan sudut medan putar (rad/s)
Persamaan 2.38 sangatlah berguna, karena kecepatan sudut medan putar (sinkron) adalah konstan untuk suatu nilai frekuensi dan jumlah kutub. Sehingga,
dengan mengetahui daya celah udara PAG dapat kita peroleh nilai torsi induksi motor. Daya celah udara PAG adalah daya yang menyebrangi celah dari rangkaian stator ke rangkaian rotor. Daya ini sama dengan daya yang diserap pada
tahanan
s R2,
. Dengan menggunakan persamaan (2.27), bila harga dapat kita
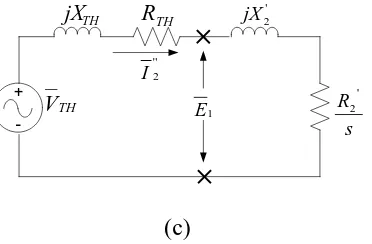
temukan, maka daya daya celah udara dan torsi induksi akan dapat diketahui. Dengan memperhatikan gambar 2.18, untuk menyelesaikan rangkaian
tersebut guna mendapatkan harga , ada beberpa cara yang dapat ditempuh.
Salah satu cara termudah adalah dengan menggunakan penyelesaian Thevenin, yaitu dengan menentukan ekivalen Thevenin dari bagian yang bertanda X ke kiri rangkaian.
+
Untuk men-Theveninkannya, hal pertama yang harus dilakukan adalah
dengan meng-open-circuit terminal yang bertanda X (perhatikan gambar 2.19(a)) sehingga didapatkan tegangan open-circuit disana. Kemudian, untuk menemukan
impedansi Thevenin, hubung-singkatkan tegangan fasa (sumber) sehingga didapatkan Zeq.
Dari gambar 2.19(a), dengan menggunakan aturan pembagian tegangan
diperoleh :
=
Magnitud dari tegangan Thevenin di atas adalah :
………. (2.39)
Karena reaktansi magnetisasi Xm >> X1 dan Xm >> R1, maka harga pendekatan magnitud tegangan Thevenin adalah :
………. (2.40)
+
Gambar 2.19. (a) Tegangan Ekivalen Thevenin Sisi Rangkaian Input,
(b) Impedansi Ekivalen Sisi Rangkaian Input, (c) Hasil Rangkaian Ekivalen yang Disederhanakan
dari Gambar 2.18.
Pada gambar 2.19(b) dapat dilihat bahwa rangkaian input dengan sumber tegangan input ditiadakan, dua impedansi dalam posisi pararel, dan didapatkan
impedansi Thevenin sebagai berikut :
……… (2.41)
Karena Xm >> X1, dan (Xm + X1) >> R1, tahanan dan reaktansi Thevenin
pendekatan adalah :
……… (2.42)
……… (2.43)
Dari hasil rangkaian ekivalen yang diberikan pada gambar 2.19(c), dapat kita
peroleh suatu persamaan untuk arus
……….. (2.44)
……….. (2.45)
Sehingga dapat diperoleh persamaan daya celah udara
……… (2.46)
Dengan mensubstitusikan persamaan (2.46) ke dalam persamaan (2.38), maka
dapat kita peroleh suatu persamaan untuk torsi induksi
……… (2.47)
Gambar 2.20 memperlihatkan kurva torsi motor induksi sebagai fungsi dari slip.
Gambar 2.20. Kurva Karakteristik Torsi-Slip Motor Induksi
2.9 Desain Motor Induksi Tiga Fasa
Standard NEMA pada dasarnya mengkategorikan motor induksi ke dalam
Gambar 2.21. Karakteristik Torsi Kecepatan Motor Induksi
pada Berbagai Desain
Kelas A : disain ini memiliki torsi start normal (150 – 170%) dari nilai
ratingnya) dan arus start relatif tinggi. Torsi break down nya merupakan yang paling tinggi dari semua disain NEMA. Motor ini mampu menangani
beban lebih dalam jumlah besar selama waktu yang singkat. Slip < = 5%
Kelas B : merupakan disain yang paling sering dijumpai di pasaran.
Motor ini memiliki torsi start yang normal seperti halnya disain kelas A,
akan tetapi motor ini memberikan arus start yang rendah. Torsi locked rotor cukup baik untuk menstart berbagai beban yang dijumpai dalam
aplikasi industri. Slip motor ini < =5 %, efisiensi dan faktor dayanya pada saat berbeban penuh tinggi sehingga disain ini merupakan yang paling populer. Aplikasinya dapat dijumpai pada pompa, kipas angin, dan
peralatan-peralatan mesin.
Kelas C : memiliki torsi start lebih tinggi (200 % dari nilai ratingnya) dari
dari motor ini mendekati kecepatan penuh tanpa overload dalam jumlah
besar. Arus startnya rendah, slipnya < = 5 %
Kelas D : memiliki torsi start yang paling tinggi. Arus start dan kecepatan
beban penuhnya rendah. Memiliki nilai slip yang tinggi (5 – 13 %), sehingga motor ini cocok untuk aplikasi dengan perubahan beban dan perubahan kecepatan secara mendadak pada motor. Contoh aplikasinya :
BAB III
MOTOR INDUKSI TIGA FASA SEBAGAI GENERATOR
INDUKSI DENGAN KELUARAN SATU FASA
3.1 Umum
Motor induksi dapat dioperasikan sebagai generator bila motor diputar oleh sebuah penggerak mula (prime mover) melebihi kecepatan sinkronnya (kecepatan medan putar) dan tersedianya suatu sumber daya reaktif untuk
kebutuhan arus eksitasi.
Motor induksi sebagai generator kini telah luas penggunaannya pada
pembangkit-pembangkit listrik energi terbarukan seperti pada PLTMh dan PLTAngin. Penggunaan motor induksi rotor sangkar pada pembangkit-pembangkit listrik tersebut dikarenakan banyaknya keuntungan yang dimilikinya
dibandingkan dengan generator sinkron dalam penggunaannya pada daerah-daerah terpencil dan skala tertentu.
Penggunaan motor induksi tiga fasa sebagai generator induksi dengan daya keluaran satu fasa menjadi suatu pilihan untuk pelistrikan daerah-daerah terpencil yang memang beban-beban yang umumnya digunakan adalah satu fasa, selain itu
juga dikarenakan biaya distribusi dan proteksi yang lebih rendah bila dibandingkan dengan menggunakan sistem jaringan tiga fasa.
Motor induksi tiga fasa dapat dijadikan generator induksi dengan keluaran
satu fasa. Metode yang digunakan, yang juga diaplikasikan dalam tugas akhir ini, adalah dengan menggunakan konfigurasi C-2C. Konfigurasi ini merupakan
statornya terhubung segitiga (Δ), dengan memberikan kapasitor sebesar C pada
antar fasa yang satu dan sebesar 2C pada antar fasa yang lainnya, sementara pada antar fasa yang ketiga tidak ada.
3.2 Keunggulan dan Kelemahan Penggunaan Motor Induksi Tiga Fasa
Sebagai Generator
Motor induksi tiga fasa yang umum digunakan sebagai generator adalah motor induksi jenis sangkar tupai (squirrel cage). Penggunaan motor induksi jenis
ini sebagai generator pada pembangkit-pembangkit listrik yang menggunakan tenaga air (mikro hidro) pada daerah terpencil dikarenakan beberapa keuntungan yang dimilikinya. Beberapa keuntungan tersebut adalah :
• Ketersediaan
Motor induksi tiga fasa lebih banyak tersedia dipasaran
dibandingkan dengan generator sinkron. • Harga
Motor induksi untuk kapasitas yang kecil (0,5 – 50 kW) harganya
lebih murah dan penggunaannya sebagai generator lebih ekonomis dibandingkan dengan generator sinkron.
• Kesederhanaan
Motor induksi yang dipergunakan sebagai generator tidak memerlukan sistem eksitasi (sumber arus searah) dan peralatan
• Konstruksi
Motor induksi sangkar tupai dalam penggunaannya sebagai
generator memiliki konstruksi yang kokoh dan cukup sederhana dikarenakan ketiadaan slip ring dan sikat.
• Perawatan
Motor induksi sebagai generator membutuhkan perawatan yang sedikit. Hal ini dikarenakan motor induksi tidak memiliki penguatan
menggunakan sumber dc, yang mana apabila penguatan itu berasal dari sumber seperti baterai maka tentunya diperlukan waktu perawatan untuk pengisian (charging) ataupun penggantian baterai. Motor
induksi juga umumnya tertutup penuh, hal ini menjamin perlindungan yang baik dari debu dan air. Selain itu, tidak seperti generator sinkron
yang menggunakan sikat, generator induksi tidak direpotkan oleh perawatan dalam penggantian sikat ataupun pembersihan debu dari sikat karbon tersebut.
Dalam penggunaanya sebagai generator, kita dihadapkan pada beberapa masalah mengenai kelemahan-kelemahan yang dimiliki oleh motor induksi.
Kelemahan-kelemahan tersebut antara lain :
• Dibutuhkan perhitungan
Motor induksi sebagai generator tidak akan bekerja (dengan baik) tanpa kapasitor eksitasi terpasang dengan nilai yang sesuai dengan
• Dibutuhkan sumber daya reaktif eksternal
Motor induksi sebagai generator tidak dapat memproduksi daya reaktif
dengan sendirinya, tetapi membutuhkan sumber daya reaktif eksternal baik itu dari sumber jala-jala ataupun kapasitor.
Walaupun memiliki beberapa kelemahan, akan tetapi kelemahan-kelemahan tersebut masih dapat diatasi. Oleh karena itu motor induksi sebagai
generator mempunyai keuntungan yang jauh lebih banyak dari pada generator sinkron dalam penggunaannya untuk pembangkit listrik pada daerah-daerah terpencil.
3.3 Syarat – syarat Pengoperasian Motor Induksi Sebagai Generator
Untuk mengoperasikan motor induksi sebagai generator, diperlukan beberapa syarat yaitu berupa kondisi-kondisi yang harus dipenuhi agar diperoleh fungsi generator dari mesin tersebut. Kondisi-kondisi tersebut akan dijelaskan
sebagai berikut.
3.3.1 nr > ns
Untuk mengoperasikan motor induksi sebagai generator diperlukan daya mekanis yang berasal dari penggerak mula (prime mover) untuk memutar rotor
diatas kecepatan sinkronnya (nr > ns), dimana daya mekanis ini dapat diperoleh dari tenaga air (mikro hidro), tenaga angin, atau mesin diesel atau dengan kata lain
mesin bekerja pada slip negatif (s < 0). Dengan menggunakan persamaan (2.2)
Gambar 3.1. Kurva Karakteristik Torsi-Kecepatan Mesin Induksi pada
Berbagai Daerah Operasi
Dari kurva karakteristik torsi-kecepatan pada gambar 3.1 dapat kita lihat bahwa, apabila sebuah motor induksi digerakkan pada suatu kecepatan yang lebih
besar dari kecepatan sinkronnya, arah dari torsi induksinya akan berbalik dan motor akan bertindak sebagai sebuah generator. Dengan bertambahnya torsi yang
diberikan oleh penggerak mula, besar daya yang dihasilkan oleh generator induksi juga bertambah.
3.3.2 Adanya Sumber Daya Reaktif
Sebagai sebuah generator, mesin induksi memiliki kelemahan karena tidak
memiliki rangkaian medan yang terpisah untuk dapat menghasilkan daya reaktif, dimana pada kenyataannya generator induksi sendiri mengonsumsi daya reaktif. Dengan demikian, diperlukan suatu sumber daya reaktif eksternal yang terhubung
ke generator untuk dapat memenuhi kebutuhan daya reaktif sebagai sumber arus eksitasi. Tanpa adanya daya reaktif, motor induksi yang dioperasikan sebagai
Dalam prakteknya, terdapat dua jenis kondisi pengoperasian motor induksi
sebagai generator, yaitu terhubung ke sistem jaringan tiga fasa (grid connected) dan beroperasi sendiri (stand alone). Pada kondisi generator induksi yang
terhubung ke sistem jaringan tiga fasa, yang terjadi adalah generator induksi menyuplai daya aktif (P) tetapi menyerap daya reaktif (Q) dari sistem.
MISG
Prime Mover
Sistem Jaringan Tiga Fasa
Q P
Poros
Gambar 3.2. Generator Induksi Terhubung ke Sistem Jaringan 3-Fasa
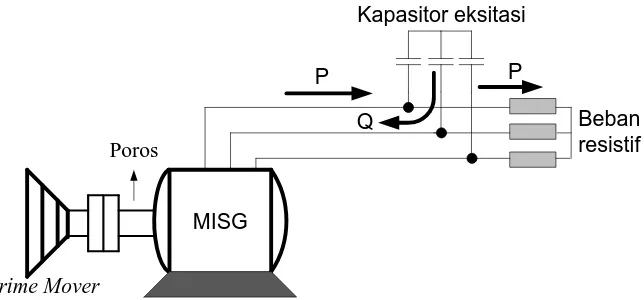
Untuk motor induksi tiga fasa sebagai generator yang beroperasi sendiri, kebutuhan daya reaktif tidak dapat lagi diperoleh dari jala-jala. Untuk kondisi yang demikian, kebutuhan daya reaktif dapat diperoleh generator dari suatu unit
kapasitor. Kapasitor tersebut dihubungkan pararel dengan terminal keluaran generator. Kapasitor yang terpasang harus mampu memenuhi kebutuhan daya
v
T,
VIm, A
MISG
Prime Mover
Q P
Poros
Kapasitor eksitasi
Beban resistif P
Gambar 3.3. Generator Induksi Penguatan Sendiri (Self-Excited)
Arus magnetisasi Im yang dibutuhkan oleh sebuah motor induksi yang dioperasikan sebagai generator, sebagai fungsi dari tegangan terminal, dapat
ditemukan dengan menjalankan mesin sebagai motor pada keadaan beban-nol dan mengukur arus jangkarnya sebagai fungsi dari tegangan terminal. Kurva
magnetisasi tersebut ditunjukkan oleh gambar 3.4. Untuk memperoleh tingkat tegangan yang diberikan pada generator induksi, kapasitor-kapasitor eksternal harus dapat menyuplai arus magnetisasi yang sesuai dengan tingkat tegangan
tersebut.
Im, Ic, A vT,V
V1, nl
V3, nl V2, nl
C1 > C2 > C3
Tegangan kapasitor
Vc, V
Ic , A
Arus kapasitor
C1 > C2 > C3
Gambar 3.5. Kurva Karakteristik Tegangan-Arus Kapasitor
Karena arus reaktif yang dapat diproduksi oleh kapasitor berbanding lurus
terhadap tegangan yang diberikan kepadanya, lokus dari semua kemungkinan kombinasi tegangan dan arus melalui sebuah kapasitor merupakan sebuah garis
lurus. Plot antara tegangan dan arus tersebut untuk suatu nilai frekuensi ditunjukkan pada gambar 3.5.
Gambar 3.6. Kurva Karakteristik Tegangan Terminal Generator Induksi pada
Keadaan Tanpa Beban
Jika satu set kapasitor-kapasitor tiga fasa dihubungkan secara pararel pada
merupakan titik potong dari kurva magnetisasi generator dan garis beban
kapasitor, seperti ditunjukkan pada gambar 3.6. Titik potong dari kedua kurva juga merupakan titik yang mana menyatakan kebutuhan daya reaktif generator
induksi yang sebenarnya diberikan oleh kapasitor.
3.4 Kapasitor pada Motor Induksi Tiga Fasa Sebagai Generator
3.4.1 Umum
Kapasitor secara sederhana didefinisikan sebagai suatu peralatan yang
terdiri dari dua buah keping/plat konduktor yang dipisahkan oleh suatu bahan dielektrik, yang memiliki kemampuan untuk dapat menyimpan energi listrik. Bahan-bahan dielektrik yang umumnya digunakan misalnya udara vakum,
keramik, gelas, dan lainnya.
Sedangkan kapasitansi kapasitor (C) didefinisikan sebagai jumlah muatan
yang mampu diterima dan disimpan oleh kapasitor untuk setiap nilai tegangan dari potensial yang diberikan.
……… (3.1)
dimana,
Q = muatan listrik (coulomb)
C = kapasitansi kapasitor (farad)
V = tegangan kapasitor (Volt)
Kapasitor yang umumnya cocok digunakan sebagai kapasitor eksitasi pada generator induksi penguatan sendiri adalah jenis motor run, yang juga biasa
Rating tegangan kapasitor biasanya berkisar 380 – 450 V, meskipun terkadang
ada juga jenis untuk ukuran 220 – 240 V.
Kapasitor terdapat dalam ukuran standard dan umumnya dispesifikasikan
dengan toleransi +/- 10%. Dengan demikian, tanpa dilakukan pengukuran kapasitor secara individual/perfasa, akan sulit didapatkan nilai kapasitansi yang sesuai dengan kebutuhan. Dalam penggunaannya, disarankan agar digunakan
kapasitor pada rating tegangan yang lebih besar dari nilai kapasitansi yang dibutuhkan untuk pengoperasian generator. Hal ini dilakukan agar kapasitor
memilki umur kerja yang lebih lama.
3.4.2 Pemasangan Kapasitor
Untuk generator induksi yang membangkitkan tegangan tiga fasa, kapasitor eksitasi dapat dihubungkan baik itu segitiga (∆) ataupun bintang (Y).
Bentuk sistem konfigurasi pemasangan kapasitor eksitasi tersebut dapat dilihat pada gambar di bawah.
Gambar 3.7. Hubungan Bintang (Y) dan Segitiga (∆) pada Kapasitor Eksitasi
Kapasitor yang dihubungkan bintang atau segitiga adalah mempunyai hubungan sebagai berikut :
……… (3.3)
=
=
= ……….. (3.4)
Karena = ……… (3.5)
maka = ……….. (3.6)
Sehingga jika kapasitor dihubungkan bintang ( Y ), maka nilai kapasitansi yang dibutuhkan adalah tiga kali nilai kapasitansi bila terhubung segitiga (∆).
3.4.3 Perhitungan Besar Kapasitansi Kapasitor
Pada generator induksi penguatan sendiri (self-excited), kapasitor induksi
merupakan satu-satunya sumber daya reaktif eksternal. Dengan demikian, agar diperoleh tegangan operasi yang sesuai dengan kebutuhan pada frekuensi yang
diinginkan, besar kapasitansi untuk kapasitor eksitasi yang terpasang harus ditentukan dengan baik.
Untuk memperoleh nilai pendekatan, perhitungan kebutuhan kapasitansi
kapasitor eksitasi generator induksi tiga fasa dapat diperoleh melalui dua metode, yaitu melalui percobaan beban nol dan data pabrikan (name plate) dari motor
Percobaan Beban Nol
Data hasil percobaan beban nol dapat digunakan untuk menghitung kapasitansi eksitasi karena daya semu yang ditarik oleh motor induksi pada
keadaan beban nol mendekati nilai daya reaktif yang dibutuhkan oleh mesin ketika bekerja sebagai generator.
Dari data hasil percobaan beban nol, dapat dihitung nilai daya semu :
VA ………... (3.7)
Dari penjelasan di atas diketahui bahwa :
VAR ……… (3.8)
Data pabrikan (name plate)
Dari data yang ada pada name plate mesin, seperti tegangan operasi, arus
beban penuh, dan cos φ, maka dapat dihitung daya semu pada keadaan beban
penuhnya :
VA ……… (3.9)
Watt ……… (3.10)
Dari persamaan segitiga daya dapat diperoleh nilai daya reaktif :
VAR ………. (3.11)
Dari hasil perhitungan kebutuhan daya reaktif, baik itu yang diperoleh dari
metode percobaan beban nol maupun data name plate motor, kemudian perhitungan dilanjutkan sebagai berikut.
Daya reaktif yang dibutuhkan per fasa :
• Hubungan bintang (Y) :
VpY =
Volt ……… (3.13)
IC = Ampere ………. (3.14)
=
=
, makaC/fasaY = µF ……… (3.15)
atau,
= = µF ………. (3.16)
• Hubungan segitiga (∆) :
Vp∆ = Vl ∆ Volt ………. (3.17)
IC = Ampere ……… (3.18)
C/fasa∆ = µF ………. (3.19)
= = µF ……… (3.20)
dimana,
V0/I0 = tegangan/arus line to line keadaan beban nol.
VlY = tegangan line to line kapasitor hubungan bintang (Y)
Vl∆= tegangan line to line kapasitor hubungan segitiga (∆)
VpY = tegangan per fasa kapasitor hubungan bintang (Y)
Vp∆ = tegangan per fasa kapasitor hubungan segitiga (∆)
Nilai kapasitor yang diperoleh dari perhitungan ini merupakan nilai