TUGAS AKHIR
ANALISIS PERBANDINGAN REGULASI TEGANGAN DAN
EFISIENSI PADA MOTOR INDUKSI TIGA FASA SEBAGAI
GENERATOR INDUKSI ANTARA TERMINAL STATOR
HUBUNGAN STAR DENGAN DELTA
Diajukan untuk memenuhi salah satu persyaratan dalam menyelesaikan pendidikan sarjana (S-1) pada Departemen Teknik Elektro
OLEH :
BENNI ARITONANG NIM : 0 5 0 4 0 2 0 6 2
DEPARTEMEN TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA
MEDAN
ABSTRAK
Motor induksi tiga fasa dapat dioperasikan sebagai generator induksi. Proses perubahan motor induksi menjadi generator induksi membutuhkan daya reaktif untuk membangkitkan tegangan keluaran generator induksi tersebut. Penyedia daya reaktif tersebut adalah kapasitor yang berfungsi sebagai eksitasi. Generator induksi dioperasikan pada kondisi tanpa beban dan kondisi berbeban pada berbagai nilai kapasitor eksitasi. Semakin besar nilai kapasitor eksitasi maka semakin besar pula tegangan keluaran generator induksi. Pada kondisi berbeban, penambahan beban mengakibatkan tegangan keluaran generator menjadi turun sehingga akan memperbesar regulasi tegangan. Penambahan beban juga akan memperbesar efisiensi generator induksi. Dalam penggunaannya, terminal stator motor induksi sebagai generator induksi boleh saja kita menggunakan hubungan star atau hubungan delta.
KATA PENGANTAR
Puji dan syukur penulis panjatkan kepada Tuhan Yesus yang oleh karena kasihNya, penulis dimampukan menyelesaikan tugas akhir ini. Adapun tugas akhir ini berjudul “Analisis Perbandingan Regulasi Tegangan dan Efisiensi pada Motor Induksi Tiga Fasa Sebagai Generator Induksi Antara Terminal Stator Hubungan Star dengan Delta”, yang disusun untuk memenuhi salah satu syarat dalam kurikulum pembelajaran di Departemen Teknik Elektro Universitas Sumatera Utara untuk memperoleh gelar Sarjana Teknik.
Dalam penulisan tugas akhir ini, penulis tidak terlepas dari bantuan banyak pihak. Untuk itulah penulis ingin mengucapkan terimakasih kepada :
1. Kedua orang tua (J. Aritonang dan L. br Simatupang) yang telah banyak memberikan kasih sayang dan mendoakan penulis. Juga untuk abang dan adik-adikku tercinta (B’Agus, Kristina, Diana, J. Erikson) yang memberikan perhatian dan doa sehingga tugas akhir ini dapat terselesaikan.
2. Bapak Prof. Dr. Ir. Usman Baafai selaku Pelaksana Harian Ketua Departemen Teknik Elektro Fakultas Teknik Universitas Sumatera Utara.
3. Bapak Rahmad Fauzi, ST, MT selaku Sekretaris Departemen Teknik Elektro Fakultas Teknik Universitas Sumatera Utara.
5. Bapak Ir. Zulkarnaen Pane selaku dosen wali penulis yang telah membantu dari awal perkuliahan sampai penyelesaian tugas akhir ini. 6. Bapak Drs. B. Aritonang, ST selaku Kepala Laboratorium Mesin –
Mesin Listrik Pusat Pengembangan & Pemberdayaan Pendidik dan Tenaga Kependidikan (P4TK) Medan.
7. Bapak T. Simatupang dan Bapak Epri yang telah banyak meluangkan waktunya saat melakukan riset di P4TK.
8. Seluruh Bapak/Ibu Dosen dan Staf Pegawai Departemen Teknik Elektro Fakultas Teknik Universitas Teknik Elektro.
9. Teman-teman Departemen Teknik Elektro stambuk 2005 (Julius, Fritz, Sadak, Mangiring, Elis, Ferry, Tommy, Edison) serta seluruh teman-teman yang namanya tidak dapat penulis sebutkan satu persatu, yang telah memberikan masukan dan perhatian kepada penulis.
Penulis menyadari masih banyak kekurangan dalam penulisan tugas akhir ini. Oleh karena itu penulis sangat mengharapkan kritik dan saran yang membangun demi penyempurnaan tugas akhir ini.
Akhir kata, kiranya tugas akhir ini berguna bagi pembaca terutama yang ingin mendalami motor induksi sebagai generator.
Medan, Juni 2010
DAFTAR ISI
ABSTRAK ... i
KATA PENGANTAR ... ii
DAFTAR ISI ... iv
DAFTAR GAMBAR... viii
I. DAFTAR TABEL xi II. BAB I : PENDAHULUAN 1.1 Latar Belakang ... 1
1.2 Tujuan Penulisan ... 2
1.3 Manfaat Penulisan ... 2
1.4 Batasan Masalah ... 3
1.5 Metode Penulisan ... 3
1.6 Sistematika Penulisan ... 4
III. BAB II: MOTOR INDUKSI TIGA FASA 2.1 Umum ... 6
2.2 Konstruksi Motor Induksi ... 6
2.2.1. Stator...7
2.2.2. Rotor...7
2.3 Prinsip Medan Putar ... 8
2.4 Prinsip Kerja Motor Induksi Tiga Phasa ... 12
2.5 Rangkaian Ekivalen Motor Induksi ... 16
2.5.1 Rangkaian Ekivalen Stator……… 16
2.6 Aliran Daya dan Efisiensi Motor Induksi Tiga Fasa... .24
2.6.1 Aliran Daya……….24
2.6.2 Efisiensi……… 27
2.7 Torsi Motor Induksi Tiga Fasa ... 29
2.8 Desain Motor Induksi Tiga Fasa ... 33
BAB III : MOTOR INDUKSI TIGA FASA SEBAGAI GENERATOR INDUKSI 3.1 Umum ... ...35
3.2 Syarat-Syarat Mesin Induksi Sebagai Generator... ...37
3.2.1 Slip Negatif (s < 0)……….. 37
3.2.2 Adanya Sumber Daya Reaktif………. 38
3.3 Kapasitor pada Motor Induksi Tiga Fasa Sebagai Generator ... 40
3.3.1 Umum ... 40
3.3.2 Pemasangan Kapasitor ... 41
3.3.3 Perhitungan Besar Kapasitansi Kapasitor ... 42
3.4 Prinsip Kerja dan Pembangkitan Tegangan Generator Induksi…46 3.5 Pengaruh Pembebanan Resistif Terhadap Arus Eksitasi………..50
3.6 Keunggulan dan Kelemahan Penggunaan Motor Induksi Tiga Fasa Sebagai Generator………52
3.7 Aliran Daya dan Efisiensi Generator Induksi Tiga Fasa………..55
3.7.1 Aliran Daya……….. 55
BAB IV : ANALISIS PERBANDINGAN REGULASI TEGANGAN
DAN EFISIENSI PADA MOTOR INDUKSI TIGA FASA
SEBAGAI GENERATOR INDUKSI ANTARA TERMINAL
STATOR HUBUNGAN STAR DENGAN DELTA
4.1. Umum ... 58
4.2. Peralatan yang Digunakan... 59
4.3. Penentuan Besar Nilai Kapasitor ... ..60
4.4. Percobaan Motor Induksi Tiga Fasa Sebagai Generator Induksi pada Terminal Stator Hubungan Star ...62
4.4.1 Percobaan Beban Nol...62
4.4.1.1 Rangkaian Percobaan... 62
4.4.1.2 Prosedur Percobaan... 63
4.4.1.3 Data Hasil Percobaan... 64
4.4.2 Percobaan Berbeban... 64
4.4.2.1 Rangkaian Percobaan... 65
4.4.2.2 Prosedur Percobaan... 65
4.4.2.3 Data Hasil Percobaan... 67
4.5 Percobaan Motor Induksi Tiga Fasa Sebagai Generator Induksi pada Terminal Stator Hubungan Delta...68
4.5.1 Percobaan Beban Nol... 68
4.5.1.1 Rangkaian Percobaan... 68
4.5.1.2 Prosedur Percobaan... 69
4.5.1.3 Data Hasil Percobaan... 70
4.5.2.1 Rangkaian Percobaan... 71 4.5.2.2 Prosedur Percobaan... 71 4.5.2.3 Data Hasil Percobaan... 73 4.6 Analisis Data Hasil Percobaan Motor Induksi Tiga Fasa
Sebagai Generator Induksi Antara Terminal Stator
Hubungan Star Dengan Delta... 74 4.6.1 Regulasi Tegangan... 74 4.6.2 Efisiensi... 75
BAB V : KESIMPULAN
5.1. Kesimpulan ... 85
DAFTAR PUSTAKA ... 86
DAFTAR GAMBAR
Gambar 2.1: Konstruksi stator... 7
Gambar 2.2: Rotor Sangkar (squirrel cage rotor)... 8
Gambar 2.3: Rotor belitan (wound rotor)... 8
Gambar 2.4: Arus tiga fasa seimbang... 9
Gambar 2.5: Diagram fasor fluksi tiga fasa seimbang... 9
Gambar 2.6: Medan putar pada motor induksi tiga fasa... 9
Gambar 2.7 Proses Induksi Medan Putar Stator pada Kumparan Rotor... ..12
Gambar 2.8 Konduktor Berarus Dalam Ruang Medan Magnet………... 13
Gambar 2.9 Rangkaian Ekivalen Stator ...………. 17
Gambar 2.10 Rangkaian Ekivalen Rotor ...18
Gambar 2.11. Rangkaian Ekivalen Rotor yang sudah dipengaruhi slip ...19
Gambar 2.12. Rangkaian Ekivalen motor yang berasal dari penurunan persamaan ……...……… 21
Gambar 2.13 Gambar rangkaian ekivalen per phasa motor induksi... 22
Gambar 2.14. Rangkaian Ekivalen Motor Induksi yang disederhanakan dengan sisi primer sebagai referensi....………. 24
Gambar 2.15. Bentuk lain rangkaian ekivalen motor induksi dilihat dari sisi stator …...…… 23
Gambar 2.16 Rangkaian Ekivalen Motor Induksi yang disederhanakan dengan sisi primer sebagai referensi dengan mengabaikan tahanan rugi-rugi inti (Rc)...………. 24
Gambar 2.17.Diagram Aliran Daya...25
Gambar 2.19 Impedansi Ekivalen Thevenin pada Sisi Rangkaian Input... . 31 Gambar 2.20. Rangkaian Ekivalen Thevenin Motor Induksi... 31 Gambar 2.21 Kurva Karakteristik Torsi-Slip Motor Induksi...32 Gambar 2.22. Karakteristik torsi kecepatan motor induksi pada berbagai disain..33 Gambar 3.1 Kurva Karakteristik Torsi-Kecepatan Mesin Induksi pada
Berbagai Daerah Operasi……… 37 Gambar 3.2 Generator Induksi Terhubung ke Sistem Jaringan 3-Fasa……… 39 Gambar 3.3 Generator Induksi Penguatan Sendiri (Self-Excited)……… 39 Gambar 3.4. Hubungan Bintang (Y) dan Segitiga (∆) pada Kapasitor Eksitasi 41 Gambar 3.5. Skema Umum Prinsip Kerja Generator Induksi
Penguatan Sendiri……… 46
Gambar 3.6. (a) Rangkaian Ekivalen per-Fasa Generator Induksi ……… 47 (b) Rangkaian Penyederhanaan Rangkaian Ekivalen 3.6 (a)…… 48
Gambar 3.7. Proses Pembangkitan Tegangan……… 49 Gambar 3.8. Tegangan Fungsi Kapasitor Eksitasi ………... 49 Gambar 3.9. Tegangan Fungsi Arus Eksitasi dengan Faktor Kerja Satu…… 51 Gambar 3.10. Diagram Aliran Daya Aktif……… 55 Gambar 4.1. Rangkaian Percobaan Beban Nol Motor Induksi Tiga Fasa
Sebagai Generator pada Terminal Stator Hubungan Star………… 62 Gambar 4.2. Rangkaian Percobaan Berbeban Motor Induksi Tiga Fasa
Sebagai Generator pada Terminal Stator Hubungan Star…………. 65 Gambar 4.3. Rangkaian Percobaan Beban Nol Motor Induksi Tiga Fasa
Sebagai Generator pada Terminal Stator Hubungan Delta……… 68 Gambar 4.4. Rangkaian Percobaan Berbeban Motor Induksi Tiga Fasa
Gambar 4.5. Grafik Pengaruh Perubahan Nilai Kapasitor Terhadap Tegangan Keluaran Generator pada Terminal Stator Hubungan Star
Dalam Keadaan Beban Nol ... 79 Gambar 4.6. Grafik Pengaruh Perubahan Nilai Kapasitor Terhadap Tegangan Keluaran Generator pada Terminal Stator Hubungan Delta
Dalam Keadaan Beban Nol ……… 79 Gambar 4.7. Grafik Pengaruh Perubahan Nilai Kapasitor Terhadap Tegangan Keluaran Generator pada Terminal Stator Hubungan Star
Dalam Keadaan Berbeban ……….. 81 Gambar 4.8. Grafik Pengaruh Perubahan Nilai Kapasitor Terhadap Tegangan
Keluaran Generator pada Terminal Stator Hubungan Delta
Dalam Keadaan Berbeban ………. 81 Gambar 4.9. Grafik Perbandingan Regulasi Tegangan Antara
Terminal Stator Hubungan Star Dengan Delta……… 83 Gambar 4.10. Grafik Perbandingan Efisiensi Antara Terminal Stator
DAFTAR TABEL
Tabel 4.1 Data Percobaan Beban Nol Motor Induksi Tiga Fasa Sebagai
Generator Induksi pada Terminal Stator Hubungan Star... 64 Tabel 4.2 Data Hasil Percobaan Berbeban Motor Induksi Tiga Fasa Sebagai
Generator Induksi pada Terminal Stator Hubungan Star... 67 Tabel 4.3 Data Percobaan Beban Nol Motor Induksi Tiga Fasa Sebagai
Generator Induksi pada Terminal Stator Hubungan Delta... 70 Tabel 4.4 Data Hasil Percobaan Berbeban Motor Induksi Tiga Fasa Sebagai
Generator Induksi pada Terminal Stator Hubungan Delta... 73 Tabel 4.5 Data Hasil Perhitungan Regulasi Tegangan dan Efisiensi
Motor Induksi Sebagai Generator pada Stator Hubungan Star... 77 Tabel 4.6 Data Hasil Perhitungan Regulasi Tegangan dan Efisiensi
Motor Induksi Sebagai Generator Pada Stator Hubungan Delta... 78 Tabel 4.7 Data Hasil Perhitungan Perbandingan Regulasi Tegangan dan
Efisiensi Motor Induksi Sebagai Generator Antara Stator
ABSTRAK
Motor induksi tiga fasa dapat dioperasikan sebagai generator induksi. Proses perubahan motor induksi menjadi generator induksi membutuhkan daya reaktif untuk membangkitkan tegangan keluaran generator induksi tersebut. Penyedia daya reaktif tersebut adalah kapasitor yang berfungsi sebagai eksitasi. Generator induksi dioperasikan pada kondisi tanpa beban dan kondisi berbeban pada berbagai nilai kapasitor eksitasi. Semakin besar nilai kapasitor eksitasi maka semakin besar pula tegangan keluaran generator induksi. Pada kondisi berbeban, penambahan beban mengakibatkan tegangan keluaran generator menjadi turun sehingga akan memperbesar regulasi tegangan. Penambahan beban juga akan memperbesar efisiensi generator induksi. Dalam penggunaannya, terminal stator motor induksi sebagai generator induksi boleh saja kita menggunakan hubungan star atau hubungan delta.
BAB I
PENDAHULUAN
1.1. Latar Belakang Masalah
Pada saat sekarang ini listrik sudah menjadi kebutuhan yang sangat pokok, sehingga permintaan akan kebutuhan listrik semakin lama selalu mengalami peningkatan. Cadangan sumber energi yang terbarukan seperti minyak, gas bumi, batubara yang digunakan untuk pembangkitan energi listrik semakin lama jumlahnya semakin menipis, sementara sumber energi lain seperti air, angin, dalam jumlah yang sangat besar belum digunakan secara maksimal.
Untuk pembangkit listrik berskala kecil seperti Pembangkit Listrik Tenaga Mikrohidro (PLTMH), penggunaan motor induksi sebagai generator sangatlah tepat. Keuntungan pengunaan motor induksi sebagai generator adalah konstruksinya kokoh, harganya terjangkau, mudah perawatannya, dan tidak membutuhkan suplai DC sebagai sumber eksitasi.
Oleh karena itu, penulis malalui tugas akhir ini melakukan penelitian di laboratorium untuk dapat menganalisis perbandingan regulasi tegangan dan efisiensi motor induksi tiga fasa sebagai generator induksi antara terminal stator hubungan star dengan delta.
1.2. Tujuan Penulisan
Tujuan penulisan tugas akhir ini adalah:
1. Untuk mengetahui perbandingan regulasi tegangan dan efisiensi pada motor induksi tiga fasa sebagai generator induksi antara hubungan star dengan delta.
2. Untuk mengetahui pengaruh perubahan kapasitansi kapasitor terhadap tegangan keluran motor induksi tiga fasa sebagai generator induksi.
3. Untuk mengetahui pengaruh perubahan nilai beban terhadap regulasi tegangan dan efisiensi motor induksi tiga fasa sebagai generator induksi.
1.3. Manfaat Penulisan
Penulisan tugas akhir ini diharapkan bemanfaat untuk :
1. Memberi informasi kepada penulis dan pembaca mengenai perbandingan regulasi tegangan dan efisiensi pada motor induksi tiga fasa sebagai generator induksi antara hubungan star dengan delta.
1.4. Batasan Masalah
Agar tujuan penulisan tugas akhir ini sesuai dengan yang diharapkan serta terarah pada judul dan bidang yang telah disebutkan di atas, maka penulis membatasi permasalahan yang akan dibahas sebagai berikut :
1. Hanya menganalisa perbandingan regulasi tegangan dan efisiensi pada MISG antara hubungan star dengan delta.
2. Motor induksi yang digunakan adalah motor induksi tiga fasa rotor sangkar tupai (squirrel cage).
3. Beban yang digunakan adalah beban resistif, dan tidak membahas pembebanan induktif dan kapasitif.
4. Analisis generator induksi dilakukan dalam keadaan steady state. 5. Kapasitor eksitasi yang digunakan adalah hubungan delta.
6. Generator induksi beroperasi sendiri (stand alone) dan tidak membahas interkoneksi dengan jaringan/ sistem.
7. Pengambilan data dan analisa data diperoleh berdasarkan peralatan yang tersedia di laboratorium mesin-mesin listrik.
1.5. Metode Penulisan
Untuk dapat menyelesaikan tugas akhir ini maka penulis menerapkan beberapa metode studi diantaranya:
2. Studi lapangan yaitu melakukan percobaan untuk mendapatkan data-data yang diperlukan di Laboratorium Mesin-mesin Listrik, Pusat Pengembangan & Pemberdayaan Pendidik dan Tenaga Kependidikan (P4TK) Medan.
3. Studi bimbingan yaitu melakukan diskusi tentang topik tugas akhir ini dengan Dosen pembimbing yang telah ditunjuk oleh pihak Departemen Teknik Elektro FT-USU, asisten Laboratorium Mesin-mesin Listrik P4TK Medan dan teman-teman sesama mahasiswa.
1.6. Sistematika Penulisan
Tugas akhir ini disusun berdasarkan sistematika penulisan sebagai berikut :
BAB I PENDAHULUAN
Bagian ini berisikan latar belakang, tujuan penulisan, manfaat penulisan, batasan masalah, dan sistematika penulisan.
BAB II MOTOR INDUKSI TIGA FASA
Bab ini memberikan penjelasan mengenai motor induksi secara umum, konstruksi, prinsip medan putar, prinsip kerja, rangkaian ekivalen, aliran daya, torsi, effisiensi, dan desain motor induksi tiga fasa.
BAB III MOTOR INDUKSI TIGA FASA SEBAGAI GENERATOR
sebagai generator, prinsip kerja dan pembangkitan tegangan generator induksi, pengaruh pembebanan resistif terhadap arus eksitasi, keunggulan dan kelemahan penggunaan motor induksi tiga fasa sebagai generator, aliran daya dan efisiensi generator induksi tiga fasa.
BAB IV ANALISIS PERBANDINGAN REGULASI TEGANGAN DAN
EFISIENSI PADA MOTOR INDUKSI TIGA FASA SEBAGAI
GENERATOR INDUKSI ANTARA TERMINAL STATOR
HUBUNGAN STAR DENGAN DELTA
Bab ini menjelaskan tentang percobaan-percobaan yang dilakukan pada motor induksi tiga fasa sebagai generator, rangkaian percobaan, prosedur percobaan, data hasil percobaan, dan analisa data hasil percobaan.
BAB V KESIMPULAN
BAB II
MOTOR INDUKSI TIGA FASA
2.1. Umum
Motor induksi merupakan motor arus bolak-balik (AC) yang paling luas
digunakan dan dapat dijumpai dalam setiap aplikasi industri maupun rumah tangga. Penamaan motor induksi berasal dari kenyataan bahwa arus rotor motor ini tidak diperoleh secara langsung dari sumber listrik, tetapi merupakan arus yang terinduksi sebagai akibat adanya perbedaan putaran antara putaran rotor dengan medan putar.
Motor ini memiliki konstruksi yang kuat, sederhana, handal, serta berbiaya murah. Di samping itu motor ini juga memiliki effisiensi yang tinggi saat berbeban penuh dan tidak membutuhkan perawatan yang banyak. Akan tetapi jika dibandingkan dengan motor DC, motor induksi masih memiliki kelemahan dalam hal pengaturan kecepatan. Dimana pada motor induksi pengaturan kecepatan sangat sukar untuk dilakukan, sementara pada motor DC hal yang sama tidak dijumpai.
2. 2. Konstruksi Motor Induksi Tiga phasa
2. 2. 1. Stator
Rangka luarnya terbuat dari baja maupun alumunium, sedangkan intinya berupa lapisan-lapisan yang terbuat dari baja silikon untuk mengurangi rugi-rugi hysterisis dan edy current. Pada intinya terdapat rongga (slot) yang berisolasi sebagai tempat belitannya. Kawat belitannya terbuat dari tembaga yang berisolasi. Belitannya digulung untuk jumlah kutub tertentu, yang diperlukan dalam menentukan kecepatan. Semakin banyak jumlah kutub maka semakin rendah kecepatan motor. Konstruksi stator dapat dilihat pada Gambar 2.1
Gambar 2.1. Konstruksi Stator
2. 2. 2. Rotor
Rotor motor induksi tiga fasa dapat dibedakan menjadi dua jenis yaitu rotor sangkar (squirrel cage rotor) dan rotor belitan (wound rotor). Rotor sangkar terdiri dari susunan batang konduktor yang dibentangkan ke dalam slot – slot yang terdapat pada permukaan rotor dan tiap – tiap ujungnya dihubung singkat dengan menggunakan shorting rings.
tersebut diikatkan pada slip ring yang berada pada poros rotor. Pada motor induksi rotor belitan, rangkaian rotornya dirancang untuk dapat disisipkan dengan tahanan eksternal, yang mana hal ini akan memberikan keuntungan dalam memodifikasi karakteristik torsi – kecepatan dari motor.
Gambar 2.2 Rotor Sangkar (squirrel cage rotor)
Gambar 2.3. Rotor belitan (wound rotor)
2.3. Prinsip Medan Putar
Pada saat kita menghubungkan sumber tiga fasa ke terminal tiga fasa motor induksi, maka arus bolak-balik sinusoidal IR, IS, IT akan mengalir pada belitan
disebut juga dengan medan putar. Medan magnet yang demikian kutub-kutubnya tidak diam pada posisi tertentu, tetapi meneruskan pergeseran posisinya disekitar stator.
Untuk melihat bagaimana medan putar dibangkitkan, maka dapat diambil contoh pada motor induksi tiga fasa dengan jumlah kutub dua. Fluks yang dihasilkan oleh arus-arus bolak-balik pada belitan stator adalah :
ΦR = Φm sin ωt...( 2.1a )
ΦS = Φm sin (ωt – 120o)...( 2.1b )
ΦT = Φm sin (ωt – 240o)...( 2.1c )
Gambar 2.4: Gambar 2.5:
Arus tiga fasa seimbang Diagram fasor fluksi tiga fasa seimbang
i ii
iii iv
( i ). Pada posisi sesaat 1 (pada Gambar ), arus yang mengalir pada phasa R adalah nol dan arus pada phasa S dan T sama besar dan bertentangan. Arus pada bagian atas mempunyai arah menuju pembaca, dan arus pada bagian bawah menjauhi pembaca. Sehingga resultan fluks magnet yang dibangkitkan memiliki arah ke kanan. Besar resultan fluks ini adalah konstan dan besarnya 1,5 Φm. Nilai tersebut dapat dibuktikan sebagai berikut:
pada saat posisi sesaat 1, ωt = 0º, sehingga besarnya nilai ketiga fluksnya
adalah: ΦR = 0;
ΦS = Φm sin ( -120o ) =
2 3
− Φm ; ΦT = Φm sin ( -240o ) =
2 3
Φm
Besarnya resultan fluksnya adalah sama dengan penjumlahan antar vektor –ΦT dan –ΦS.
Besarnya resultan fluks adalah:
(ii). Pada keadaan 2, arus bernilai maksimum negatif pada fasa S, sedangkan pada R dan fasa T bernilai 0,5 maksimum pada fasa R dan fasa T.
Pada saat sesaat di posisi 2, ωt = 30º. Sehingga besarnya fluksi adalah:
ΦR = Φm sin (30o) = 2
m
Φ
ΦS = Φm sin ( -90o ) = −Φm
2 3 2 3 2 2 60 cos 2 3
2x m x x
RS = Φ
° Φ
= Φ
m RS = Φ
ΦT = Φm sin (-120o) = 2
m
Φ
Besarnya fluks resultan adalah (ΦRS)
Penjumlahan dari ΦR, - ΦS, ΦT
Penjumlahan dari ΦR dan- ΦS adalah:
ΦRS’ =
2 2 120 cos 2
2 m m
xΦ °= Φ
Jadi Fluks resultannya adalah:
(iii). Pada keadaan 2, arus pada fasa R dan fasa T memiliki besar yang sama dan arahnya berlawanan ( 0,866 Φm ), oleh karena itu fluks yang diberikan
oleh masing – masing fasa :
ΦR= Φm sin (60o) =
2 3
Φm
ΦS= Φm sin (-60o) =
2 3
− Φm
ΦT = Φm sin (-180o) = 0
Resultan Fluksnya adalah penjumlahan dari ΦRdan ΦS :
ΦRS = 2 x
2 3
Φm cos 2 60°
= 1,5 Φm
(iv). Pada keadaan ini ωt = 90o, arus pada fasa R maksimum ( positif), dan arus pada fasa S dan fasa T = 0,5 Φm , oleh karena itu fluks pada masing –
masing fasa adalah: ΦR = Φm sin ( 90o) = Φm
ΦS = Φm sin ( -30o ) = 2 m Φ − m m m
RS +Φ = Φ
Φ =
Φ 1.5
ΦT = Φm sin ( -150o ) = 2
m
Φ −
Maka jumlah - ΦT dan – ΦS adalah:
ΦRS’ =
2 2 120 cos 2
2xΦm °= Φm
Sehingga resultannya adalah:
ΦRS = 2
m
Φ + Φ
m= 1,5 Φm
2.4. Prinsip Kerja Motor Induksi Tiga Fasa
Pada saat belitan stator diberi tegangan tiga fasa, maka pada stator akan dihasilkan arus tiga fasa, arus ini kemudian akan menghasilkan medan magnet yang berputar dengan kecepatan sinkron.
Medan putar akan terinduksi melalui celah udara menghasilkan ggl induksi (ggl lawan) pada belitan fasa stator. Medan putar tersebut juga akan memotong konduktor-konduktor belitan rotor yang diam. Hal ini terjadi karena adanya perbedaan relatif antara kecepatan fluksi yang berputar dengan konduktor rotor yang diam yang disebut juga dengan slip (s). Akibatnya adanya slip maka ggl (gaya gerak listrik) akan terinduksi pada konduktor-konduktor rotor.
Karena belitan rotor merupakan rangkaian tertutup, baik melalui cincin ujung (end ring) ataupun tahanan luar, maka arus akan mengalir pada konduktor – konduktor rotor. Karena konduktor – konduktor rotor yang mengalirkan arus ditempatkan di dalam daerah medan magnet yang dihasilkan stator maka akan terbentuklah gaya mekanik (gaya lorentz) pada konduktor – konduktor rotor. Hal ini sesuai dengan hukum gaya lorentz (perhatikan gambar 2.8) yaitu bila suatu konduktor yang dialiri arus berada dalam suatu kawasan medan magnet, maka konduktor tersebut akan mendapat gaya elektromagnetik (gaya lorentz) sebesar F= B.i.l.sin θ.
Arah dari gaya elektromagnetik tersebut dapat dijelaskan oleh kaidah tangan kanan (right-hand rule). Kaidah tangan kanan menyatakan, jika jari telunjuk menyatakan arah dari vektor arus i dan jari tengah menyatakan arah dari vektor kerapatan fluks B, maka ibu jari akan menyatakan arah gaya F yang bekerja pada konduktor tersebut.
Gaya F yang dihasilkan pada konduktor – konduktor rotor tersebut akan menghasilkan torsi (τ). Bila torsi mula yang dihasilkan pada rotor lebih besar daripada torsi beban (τ0 > τb), maka rotor akan berputar searah dengan putaran
medan putar stator.
Untuk mempelajari prinsip kerja motor induksi tiga fasa, maka dapat dijabarkan dalam beberapa langkah berikut:
1. Apabila belitan stator dihubungkan dengan sumber tegangan tiga fasa yang setimbang maka akan mengalir arus pada tiap belitan fasa.
2. Arus yang mengalir pada tiap fasa menghasilkan fluks yang berubah-ubah untuk setiap waktu.
3. Resultan dari ketiga fluksi bolak-balik tersebut menghasilkan medan putar yang bergerak dengan kecepatan sinkron ns yang besarnya ditentukan oleh
jumlah kutub p dan frekuensi stator f yang dirumuskan :
ns = p
f
120
(rpm)...( 2.2)
4. Akibat fluksi yang berputar akan menimbukanl ggl pada stator yang besarnya adalah:
e1 = - N1 dt
dΦ
(volt) ...( 2.3 )
atau E1 = - 4,44f N1Φm (volt)...( 2.4 )
dimana :
e1 = ggl induksi sesaat stator/fasa (volt)
E1 = ggl induksi efektif stator/fasa (volt)
f = frekuensi saluran (Hz)
N1 = jumlah lilitan kumparan stator/fasa
Φm = fluks magnetik maksimum (weber)
5. Fluksi yang berputar tersebut akan memotong batang konduktor pada rotor. Akibatnya pada kumparan rotor timbul tegangan induksi sebesar E2
E2 = 4,44f N2Φm (volt) ...( 2.5 )
Dimana :
E2 = tegangan induksi pada rotor saat rotor dalam keadaan diam N2 = jumlah lilitan rotor
Φm = fluksi maksimum
6. Karena kumparan rotor merupakan rangkaian tertutup, maka akan mengalir arus (I2).
7. Adanya arus (I2) di dalam medan magnet akan menimbulkan gaya (F) pada
rotor.
8. Gaya (F) akan menghasilkan torsi (τ). Apabila torsi mula yang dihasilkan lebih besar torsi beban, maka rotor akan berputar dengan kecepatan (nr)
yang searah dengan medan putar stator.
9. Pada saat berputar,maka ada perbedaan kecepatan medan putar stator (ns)
dengan kecepatan rotor (nr) disebut dengan slip (s) dan dinyatakan dengan:
s =
ns nr
ns−
x 100%...( 2.6 )
10.Pada rotor dalam keadaan berputar, besarnya tegangan yang terinduksi pada kumparan rotor akan bervariasi tergantung besarnya slip. Tegangan induksi ini dinyatakan dengan E2s yang besarnya :
E2s = 4,44sf N2Φm (volt) ...( 2.7 )
Dimana :
E2s = tegangan induksi rotor dalam keadaan berputar (volt)
11.Apabila ns = nr, maka slip akan bernilai nol. Hal ini akan menyebabkan
tidak adanya ggl induksi pada rotor tegangan tidak akan terinduksi dan arus tidak akan mengalir pada kumparan rotor, sehingga tidak akan dihasilkan torsi.
2.5. Rangkaian Ekivalen Motor Induksi
Telah disebutkan sebelumnya bahwa motor induksi identik dengan sebuah transformator, tentu saja dengan demikian rangkaian ekivalen motor induksi sama dengan rangkaian ekivalen transformator. Perbedaan yang ada hanyalah karena pada kenyataannya bahwa kumparan rotor (kumparan sekunder pada transformator) dari motor induksi berputar, yang mana berfungsi untuk menghasilkan daya mekanik. Awal dari rangkaian ekivalen motor induksi dihasilkan dengan cara yang sama sebagaimana halnya pada transformator. Semua parameter-parameter rangkaian ekivalen yang akan dijelaskan berikut mempunyai nilai-nilai perfasa.
2. 5. 1. Rangkaian Stator
Fluks pada celah udara yang berputar menghasilkan GGL induksi lawan pada
setiap phasa dari stator. Sehingga tegangan terminal V1 menjadi ggl induksi lawan
(E1) dan jatuh tegangan pada impedansi bocor stator. Sehingga persamaan
tegangan pada stator adalah:
1
V = E1 + I1 ( R1 + j X1 ) (Volt) ...(2.8)
Dimana:
1
1
E = GGL lawan yang dihasilkan oleh resultan fluks celah udara (Volt)
1
I = arus stator (Ampere)
1
R = resistansi stator (Ohm)
1
X = reaktansi bocor stator (Ohm)
Sama seperti halnya dengan trafo, maka arus stator ( I1 ) terdiri dari dua buah
komponen. Salah satunya adalah komponen beban (I2’). Salah satu komponen
yang lain adalah arus eksitasi Ie (exciting current). Arus eksitasi dapat dibagi
menjadi dua komponen yaitu, komponen rugi-rugi inti Ic yang sephasa dengan E1
dan komponen magnetisasi Im yang tertinggal 90º dengan E1. Arus Ic akan
menghasilkan rugi-rugi inti dan arus Im akan menghasilkan resultan flux celah udara.
Pada trafo arus eksitasi disebut juga arus beban nol, akan tetapi dalam motor induksi tiga phasa tidak, hal ini dikarenakan pada motor induksi arus beban nol menghasilkan fluksi celah udara dan menghasilkan rugi-rugi tanpa beban ( rugi inti + rugi gesek angin + rugi I2R dalam jumlah yang kecil) sedangkan pada trafo fungsi arus eksitasi untuk mengahasilkan fluksi dan menghasilkan rugi inti.
Sehingga rangkaian ekivalen dari stator dapat kita lihat pada Gambar 2.9.
2. 5. 2. Rangkaian Rotor
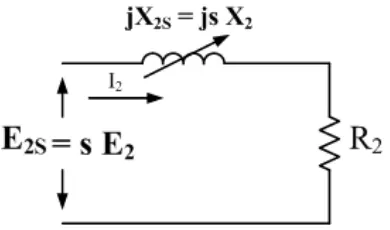
Pada saat motor start dan rotor belum berputar, maka stator dan rotor memiliki frekuensi yang sama. Tegangan induksi pada rotor dalam kondisi ini di lambangkan dengan E2. Pada saat rotor sudah berputar, maka besarnya tegangan
induksi pada rotor sudah dipengaruhi slip. Besarnya tegangan induksi pada rotor pada saat berputar untuk berbagai slip sesuai dengan persamaan 2.9.
S
E2 = s. E2 ...(2.9) Dimana:
2
E = Tegangan induksi pada rotor pada saat diam
S
E2 = Tegangan induksi pada rotor sudah berputar
Tegangan induksi pada saat motor berputar akan mempengaruhi tahanan dan reaktansi pada rotor. Tahanan pada rotor adalah konstan, dan tidak dipengaruhi oleh slip. Reaktansi dari motor induksi bergantung terhadap induktansi dari rotor dan frekuensi dari tegangan dan arus pada rotor. Dengan induktansi pada rotor adalah L2, maka reaktansi pada rotor diberikan dengan persamaan:
X2S = s X2 (Ohm) ...(2.10)
Dimana
X2 = Reaktansi rotor dalam keadaan diam (Ohm)
[image:31.595.215.410.590.705.2]Rangkaian ekivalen rotor dapat dilihat pada Gambar 2.10:
Sehingga arus yang mengalir pada Gambar 2.10 adalah:
(Ampere) ...(2.11)
Pada saat dibebani (dipengaruhi slip), maka besarnya arus yang mengalir pada rotor adalah:
(Ampere) ...( 2.12 )
(Ampere) ...( 2.13 )
[image:32.595.217.408.390.515.2]Maka rangkaian ekivalen rotor yang dipengaruhi slip pada motor induksi dapat kita lihat pada gambar 2.11:
Gambar 2.11 Rangkaian Ekivalen Rotor yang sudah dipengaruhi slip
Impedansi ekivalen rangkaian rotor pada Gambar 2.11 adalah:
S
Z2 = S R2 + jX
2 (Ohm) ...(2.14)
Pada motor induksi rotor belitan, maka rotor pada motor induksi dapat diganti dengan rangkaian ekivalen rotor yang memiliki belitan dengan jumlah phasa dan belitan yang sama dengan stator akan tetapi gaya gerak magnet (mmf)
dan fluksi yang dihasilkan harus sama dengan rotor sebenarnya, maka performansi rotor yang dilihat dari sisi primer tidak akan mengalami perubahan.
Sehingga hubungan antara tegangan yang diinduksikan pada rotor yang
sebenarnya (Erotor) dan tegangan yang diinduksikan pada rangkaian ekivalen rotor
(E2s) adalah:
s
E2 = aErotor ...(2.15) Dimana:
a : Perbandingan belitan stator dengan belitan rotor sebenarnya.
Sedangkan hubungan antara arus pada rotor sebenarnya (Irotor) dengan arus I2s pada rangkaian ekivalen rotor haruslah
s
I2 =
a Irotor
...(2.16)
Rotor dari motor induksi adalah terhubung singkat, sehingga impedansi yang diinduksikan tegangan dapat disederhanakan dengan impedansi rotor hubung singkat. Sehingga hubungan antara impedansi bocor slip frekuensi dari rangkaian ekivalen rotor (Z2S) dengan impedansi bocor slip frekuensi rotor sebenarnya
(Zrotor) adalah:
S
Z2 = S S I E 2 2 = rotor rotor I E a2
= a Zrotor 2
...(2.17)
Dengan mengingat kembali impedansi dari rangkaian ekivalen rotor yang sudah dipengaruhi slip seperti pada persamaan 2.14 maka besarnya impedansi bocor slip frekuensi dari rangkaian ekivalen rotor adalah:
S S I E 2 2
Dimana:
R2 = Tahanan rotor (Ohm)
s X2 = Reaktansi rotor yang sudah dipengaruhi slip
Z2S = Impedansi bocor slip frekuensi dari rangkaian ekivalen rotor
Pada stator dihasilkan medan putar yang berputar dengan kecepatan sinkron. Medan putar ini akan menginduksikan GGL induksi pada rangkaian ekivalen rotor
(E2s) dan menginduksikan GGL lawan pada stator sebesar E . Bila bukan karena 2 efek kecepatan, maka tegangan yang diinduksikan pada rangkaian rotor ekivalen
(E2s) akan sama dengan GGL induksi lawan pada rangkaian stator (E ) karena 2 rangkaian ekivalen rotor memiliki jumlah belitan yang sama dengan rangkaian stator. Akan tetapi karena kecepatan relative medan putar yang direferensikan pada sisi rotor adalah s kali kecepatan medan putar yang direferensikan pada sisi stator, maka hubungan antara dua buah GGL induksi ini adalah:
s
E2 = sE2 ...(2.19) Karena resultan fluks celah udara ditentukan oleh phasor penjumlahan dari arus stator dan arus rotor baik itu arus dari rotor sebenarnya maupun arus dari rangkaian ekivalen rotor, maka dalam hal ini dikarenakan jumlah belitan antara stator dan rangkaian ekivalen rotor adalah sama maka hubungan arus yang mengalir pada stator dan rotor adalah:
s
I2 = I 2' ...(2.20) Apabila persamaan 2.19 dibagi dengan persamaan 2.20 maka diperoleh:
S S
I E
2 2
= ' 2
2
I E s
Dengan mensubstitusikan persamaan 2.21 ke persamaan 2.18 maka diperoleh: S S I E 2 2 = ' 2 2 I E s
= R + 2 jsX ...(2.22) 2
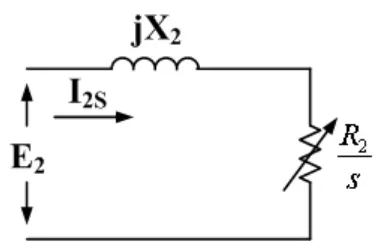
Dengan membagi persamaan (2.22) dengan s, maka didapat
' 2 2 I E = s R2
+ jX 2 ...(2.23)
[image:35.595.117.523.264.351.2]Dari persamaan (2.18), (2.19), dan (2.23) maka dapat dibuat rangkaian ekivalen rotor seperti pada Gambar 2.12.
Gambar 2.12. Rangkaian Ekivalen motor yang berasal dari penurunan persamaan
Dimana: s R2 = s R2
+ R - 2 R 2
s
R2
= R + 2 1)
1 (
2 −
s R
Dari penjelesan diatas maka dapat dibuat rangkaian ekivalen per phasa motor induksi, Gambar 2.13 menunjukkan gambar rangkaian ekivalen per phasa motor induksi:
Gambar 2.13. Gambar rangkaian ekivalen per phasa motor induksi
1 V 1 R 1 X 1 I c
R Xm
Φ
I
c
I Im
2 ' I 1 E 2 sX 2 R 2 E s 2 I s
E2 E1
2 R 2 sX 2 X s R2 2 R ) 1 1 ( 2 − s R 2
I I2'
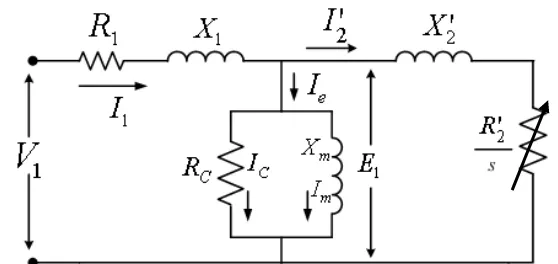
[image:35.595.156.488.569.682.2]Untuk mempermudah perhitungan, maka rangkaian ekivalen motor induksi dapat disederhanakan dengan sisi primer sebagai referensi. Sehingga rangkaian ekivalennya seperti pada Gambar 2.14:
Gambar 2.14. Rangkaian Ekivalen Motor Induksi yang disederhanakan dengan
sisi primer sebagai referensi
Atau seperti pada gambar 2.15 berikut:
Gambar 2.15. Bentuk lain rangkaian ekivalen motor induksi dilihat dari sisi stator
Dimana:
I2’ = I2S (Ampere) R2’ = a2. R2 (Ohm)
X2’ = a2 . X2 (Ohm)
Pada analisa rangkaian trafo, dapat dilakukan dengan mengabaikan cabang paralel yang terdiri dari Rc dan Xm, atau memindahkan cabang ke terminal primer.
[image:36.595.138.484.399.531.2]Hal ini berhubungan dengan kenyataan bahwa arus eksitasi pada trafo bervariasi dari 2 sampai 6 % dari arus beban dan reaktansi bocor primer per unitnya kecil. Tetapi pada motor induksi, arus eksitasi bervariasi dari 30 sampai 50 % dari arus beban penuh dan reaktansi bocor primernya relatif lebih besar.
Dalam keadaan kondisi kerja normal dengan tegangan dan frekuensi konstan, rugi-rugi inti pada motor induksi biasanya tetap. Sehingga tahanan rugi-rugi inti (Rc) dapat diabaikan dari rangkaian ekivalen. Sehingga rangkaian ekivalen motor
induksi yang disederhanakan menjadi seperti Gambar 2.16:
Gambar 2.16. Rangkaian Ekivalen Motor Induksi yang disederhanakan dengan sisi primer
sebagai referensi dengan mengabaikan tahanan rugi-rugi inti (Rc)
2.6. Aliran Daya dan Efisiensi Motor Induksi Tiga Fasa
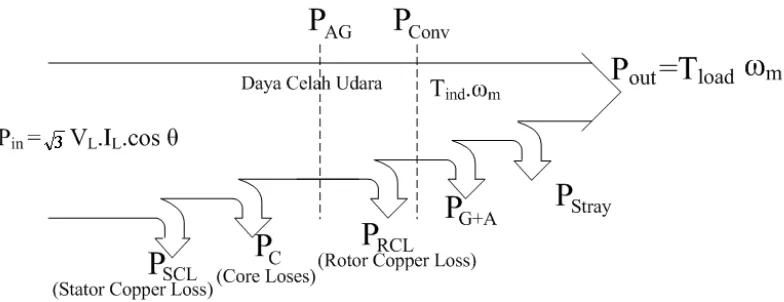
2.6.1. Aliran Daya
Gambar 2.17. Diagram Aliran Daya
Dimana :
-PSCL= rugi – rugi tembaga pada belitan stator (Watt)
- PC = rugi – rugi inti pada stator (Watt)
- PAG= daya yang ditransfer melalui celah udara (Watt)
- PRCL= rugi – rugi tembaga pada belitan rotor (Watt)
- PG+A= rugi – rugi gesek + angin (Watt)
- PStray = stray losses (Watt)
- PCONV= daya mekanis keluaran (output) (Watt)
Daya masukan (Pin) pada motor induksi tiga phasa adalah:
Pin = 3. V1. I1. cos θ ...(2.24) Dimana:
V1 = Tegangan sumber per phasa (Volt)
I1 = Arus masukan per phasa (Ampere)
Rugi-rugi yang pertama muncul pada motor induksi adalah rugi-rugi tembaga pada belitan stator (PSCL). Besarnya rugi-rugi ini dirumuskan dengan:
PSCL = 3.I12.R1 ...(2.25)
Dimana:
R1 = Tahanan belitan stator (ohm)
Kemudian rugi-rugi inti yaitu rugi-rugi hysterisis dan edy current (Pc), yang dirumuskan dengan:
PC =
C
R
E12
. 3
...(2.26)
Dimana:
Rc = Tahanan inti stator (Ohm)
E1 = Tegangan induksi di stator (Volt)
Besarnya daya yang ditransfer dari stator ke rotor melalui celah udara disebut juga daya celah udara (PAG) yang besarnya dirumuskan dengan:
AG
P = PIN−PSCL−PC ...(2.27)
Atau
AG
P =
s R
I 2 2
2 .
3 ...(2.28)
Setelah daya ditransferkan dari stator ke rotor, maka pada rotor akan terdapat rugi-rugi yaitu rugi-rugi tembaga pada rotor (PRCL) yang besarnya dirumuskan
dengan:
PRCL = 3. I22. R2 ...(2.29)
Daya yang diubah dari energi listrik menjadi mekanik disebut juga Pconv, daya ini
Pconv = PAG – PRCL = − s s R
I . 1
.
3 22 2 ...(2.30)
Hubungan antara Pconv dengan PAG dan PRCL, dapat dirumuskan sebagai berikut:
PRCL = s. PAG ...(2.31)
Pconv = (1 – s). PAG ...(2.32)
Dari Persamaan dan dapat dibuat persamaan baru yaitu:
PAG : PRCL : Pconv = 1 : s : 1 – s ...(2.33)
Apabila rugi-rugi gesek angin (PA+G) dan stray (Pstray) diketahui, maka daya
keluaran dari motor induksi adalah:
Pout = Pconv – PA+G - Pstray ...(2.34)
2.6.2. Efisiensi
Efisiensi motor induksi adalah ukuran keefektifan motor induksi untuk mengubah energi listrik menjadi energi mekanik yang dinyatakan sebagai perbandingan antara masukan dan keluaran atau dalam bentuk energi listrik berupa perbandingan watt keluaran dan watt masukan. Defenisi NEMA terhadap efisiensi energi adalah bahwa efisiensi merupakan perbandingan atau rasio dari daya keluaran yang berguna terhadap daya masukan total dan biasanya dinyatakan dalam persen juga sering dinyatakan dengan perbandingan antara keluaran dengan keluaran ditambah rugi - rugi, yang dirumuskan dalam persamaan berikut.
% 100 Loss out out in loss in in out × + = − = = P P P P P P P P
η ………. (2.35)
rugi-ruginya. Rugi-rugi pada persamaan tersebut adalah penjumlahan keseluruhan komponen rugi-rugi yang dibahas pada sub bab sebelumnya.
Pada motor induksi pengukuran efisiensi motor induksi ini sering dilakukan dengan beberapa cara seperti:
- Mengukur langsung daya listrik masukan dan daya mekanik keluaran - Mengukur langsung seluruh rugi-rugi dan daya masukan
- Mengukur setiap komponen rugi-rugi dan daya masukan,
dimana pengukuran daya masukan tetap dibutuhkan pada ketiga cara di atas. Umumnya, daya listrik dapat diukur dengan sangat tepat, keberadaan daya mekanik yang lebih sulit untuk diukur. Saat ini sudah dimungkinkan untuk mengukur torsi dan kecepatan dengan cukup akurat yang bertujuan untuk mengetahui harga efisiensi yang tepat. Pengukuran pada keseluruhan rugi-rugi ada yang berdasarkan teknik kalorimetri. Walaupun pengukuran dengan metode ini relatif sulit dilakukan, keakuratan yang dihasilkan dapat dibandingkan dengan hasil yang didapat dengan pengukuran langsung pada daya keluarannya.
2.7. Torsi Motor Induksi Tiga Fasa
Dari rangkaian ekivalen dan diagram aliran daya motor induksi tiga fasa yang telah diperoleh sebelumnya dapat diturunkan suatu rumusan umum untuk torsi induksi sebagai fungsi dari kecepatan. Torsi motor induksi diberikan oleh persamaan:
τind =
m conv P
ω ...(2.36)
τind =
sync AG P
ω ...(2.37)
Persamaan yang terakhir di atas sangat berguna, karena kecepatan sinkron selalu bernilai konstan untuk tiap – tiap frekuensi dan jumlah kutub yang diberikan motor. Karena kecepatan sinkron selalu tetap, maka daya pada celah udara akan menentukan besar torsi induksi pada motor.
Meskipun terdapat berbagai cara menyelesaikan rangkaian seperti gambar 2.16, untuk menentukan besarnya arus I2, kemungkinan penyelesaian yang paling
mudah dapat dilakukan dengan menentukan rangkaian ekivalen Thevenin dari gambar tersebut.
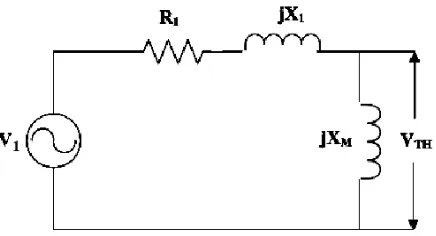
Agar dapat menghitung ekivalen Thevenin dari sisi input rangkaian ekivalen motor induksi, pertama – tama terminal X’s dihubung buka (open - circuit ), kemudian tegangan open circuit di terminal tersebut ditentukan. Untuk menentukan impedansi Thevenin, maka tegangan fasa dihubung singkat ( short –
(
)
2 1 2 1 M M X X R X + + M M X X X + 1Gambar 2.18. Tegangan Ekivalen Thevenin pada Sisi Rangkaian Input
Dari gambar 2.18 ditunjukkan bahwa terminal di open – circuit untuk mendapatkan tegangan ekivalen Thevenin. Oleh karena itu dengan aturan pembagi tegangan diperoleh :
TH
V = V1
1 M M Z Z Z +
VTH = V1
M 1 1 M jX jX R jX + +
Magnitud dari tegangan Thevenin VTH adalah :
TH
V = V1 ... (2.38)
Karena reaktansi magnetisasi XM >> X1 dan XM >> R1, harga pendekatan dari
magnitud tegangan ekivalen Thevenin :
TH
V ≈ V1 . ...(2.39)
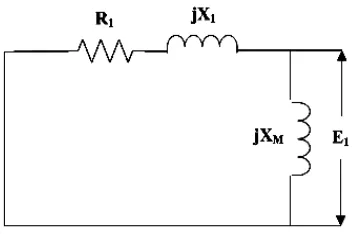
Gambar 2.19. Impedansi Ekivalen Thevenin pada Sisi Rangkaian Input
Impedansi Thevenin ZTH diberikan oleh :
ZTH =
M 1 M 1 Z Z Z Z +
ZTH = RTH + jXTH =
(
)
(
1 M)
1 1 1 M X X j R jX R jX ++ + ...(2.40)
Karena XM >> X1 dan XM + X1 >> R1, tahanan dan reaktansi Thevenin secara
pendekatan diberikan oleh :
RTH≈ R1
2 1 + M M X X X
XTH≈X1
Gambar di bawah menunjukkan rangkaian ekivalen Thevenin :
Gambar 2.20. Rangkaian Ekivalen Thevenin Motor Induksi
Dari gambar di atas arus I2 diberikan oleh :
2
I =
2 Z Z V TH TH
+ ; I2 =
2
2/s jX jX
Magnitud dari arus
2
I =
(
) (
)
21 2
2 /s X X
R R V TH TH TH + +
+ ...(2.41)
Daya pada celah udara diberikan oleh :
PAG = 3 I2
2
s R2
; PAG =
(
) (
)
[
2]
2 2 2 2 2 / / 3 X X s R R s R V TH TH TH + +
+ ...(2.42)
Sedangkan torsi induksi pada rotor
τind =
sync AG P
ω ; τind =
(
) (
)
[
2]
2 2 2 2 2 / / 3 X X s R R s R V TH TH sync TH + + +
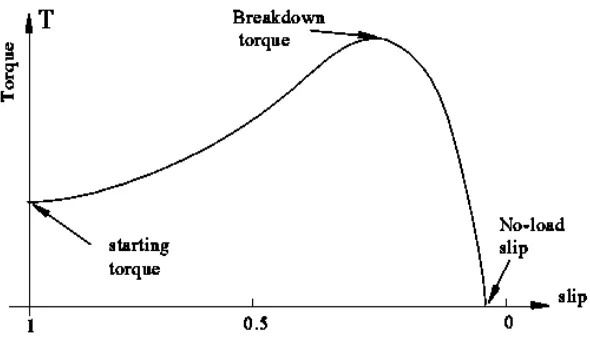
[image:45.595.115.518.67.351.2]ω
...(2.43) [image:45.595.156.451.430.601.2]Gambar kurva torsi kecepatan (slip) pada motor induksi ditunjukkan pada gambar 2.21.
2.8. Desain Motor Induksi Tiga Fasa
Standard NEMA pada dasarnya mengkategorikan motor induksi ke dalam empat kelas yakni disain A,B,C, dan D. Karakteristik torsi – kecepatannya dapat dilihat pada gambar 2.22.
Gambar 2.22. Karakteristik torsi kecepatan motor induksi pada berbagai disain
Kelas A : disain ini memiliki torsi start normal (150 – 170%) dari nilai
ratingnya) dan arus start relatif tinggi. Torsi break down nya merupakan yang paling tinggi dari semua disain NEMA. Motor ini mampu menangani beban lebih dalam jumlah besar selama waktu yang singkat. Slip < = 5%
Kelas B : merupakan disain yang paling sering dijumpai di pasaran. Motor
Kelas C : memiliki torsi start lebih tinggi (200 % dari nilai ratingnya) dari
dua disain yang sebelumnya. Aplikasinya dijumpai pada beban – beban seperti konveyor, mesin penghancur (crusher ), komperessor,dll. Operasi dari motor ini mendekati kecepatan penuh tanpa overload dalam jumlah besar. Arus startnya rendah, slipnya < = 5 %
Kelas D : memiliki torsi start yang paling tinggi. Arus start dan kecepatan
BAB III
MOTOR INDUKSI TIGA FASA SEBAGAI GENERATOR
INDUKSI
3.1. Umum
Motor induksi sebagai generator telah diterapkan secara luas pada PLTMH. Motor induksi dapat dioperasikan sebagai generator bila motor induksi diputar oleh sebuah penggerak mula (prime mover) melebihi kecepatan sinkronnya (kecepatan medan putar) dan tersedianya suatu sumber daya reaktif untuk kebutuhan arus eksitasi.
Seperti yang telah diterangkan diatas, tegangan induksi pada rotor timbul karena terpotongnya batang konduktor pada rotor oleh medan magnet putar, agar tegangan induksi selalu dapat dibangkitkan pada rotor, diperlukan perbedaan relatif antara kecepatan medan magnet putar dengan kecepatan rotor yang biasa disebut sebagai slip. Pada saat beroperasi sebagai motor, mesin induksi akan mempunyai slip positif, artinya kecepatan medan magnet putar (kec. Sinkron) akan selalu lebih besar daripada kecepatan rotor.
Proses yang sebaliknya akan terjadi apabila mesin induksi digunakan sebagai generator. Kopel pada rotor digerakan oleh turbin, adanya magnetisasi sisa (remannent magnetism) pada rotor umumnya cukup untuk membangkitkan tegangan awal, seperti halnya prinsip kerja sebagai motor. Agar pada kumparan stator dapat dibangkitkan tegangan listrik diperlukan daya reaktif untuk membangkitkan medan magnet putar. Pada kasus generator induksi beroperasi sendiri (Isolated Grid) daya reaktif tersebut harus disuplai lewat kapasitor eksitasi. Pada kasus generator induksi dikoneksikan dengan jaringan listrik lain (Grid
Connected) daya reaktif disuplai lewat jaringan tersebut, kapasitor umumnya
3.2. Syarat-syarat Pengoperasian Motor Induksi Sebagai Generator
Untuk mengoperasikan motor induksi sebagai generator, diperlukan beberapa syarat yaitu berupa kondisi-kondisi yang harus dipenuhi agar diperoleh fungsi generator dari mesin tersebut. Kondisi-kondisi tersebut akan dijelaskan sebagai berikut.
3.2.1. Slip Negatif (s < 0)
Untuk mengoperasikan motor induksi sebagai generator diperlukan daya mekanis yang berasal dari penggerak mula (prime mover) untuk memutar rotor diatas kecepatan sinkronnya (nr >ns), dimana daya mekanis ini dapat diperoleh dari tenaga air (mikro hidro), tenaga angin, atau mesin diesel atau dengan kata lain mesin bekerja pada slip negatif (s < 0).
ns =
P f 120
dan
s =
s r s
n n
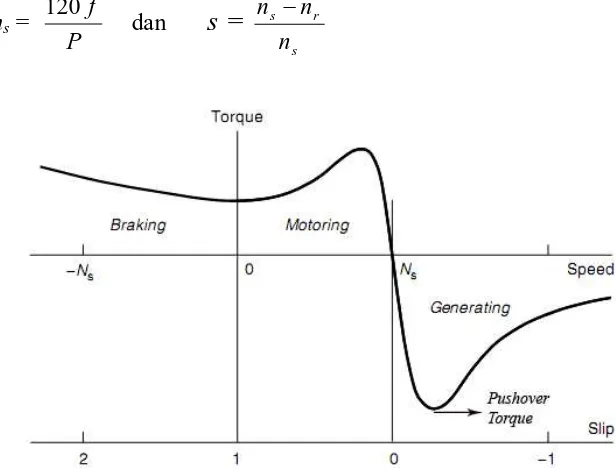
[image:50.595.154.462.429.666.2]n −
Gambar 3.1. Kurva Karakteristik Torsi-Kecepatan Mesin Induksi pada
Dari kurva karakteristik torsi-kecepatan pada gambar 3.1 dapat kita lihat bahwa, apabila sebuah motor induksi digerakkan pada suatu kecepatan yang lebih besar dari kecepatan sinkronnya, arah dari torsi induksinya akan berbalik dan motor akan bertindak sebagai sebuah generator. Dengan bertambahnya torsi yang diberikan oleh penggerak mula, besar daya yang dihasilkan oleh generator induksi juga bertambah.
3.2.2. Adanya Sumber Daya Reaktif
Sebagai sebuah generator, mesin induksi memiliki kekurangan karena tidak memiliki rangkaian medan yang terpisah untuk dapat menghasilkan daya reaktif. Dimana, pada kenyataannya generator induksi sendiri mengkonsumsi daya reaktif. Dengan demikian, diperlukan suatu sumber daya reaktif eksternal yang terhubung ke generator untuk dapat memenuhi kebutuhan daya reaktif sebagai sumber arus eksitasi. Tanpa adanya daya reaktif, motor induksi yang dioperasikan sebagai generator tidak akan menghasilkan tegangan.
Gambar 3.2. Generator Induksi Terhubung ke Sistem Jaringan 3-Fasa
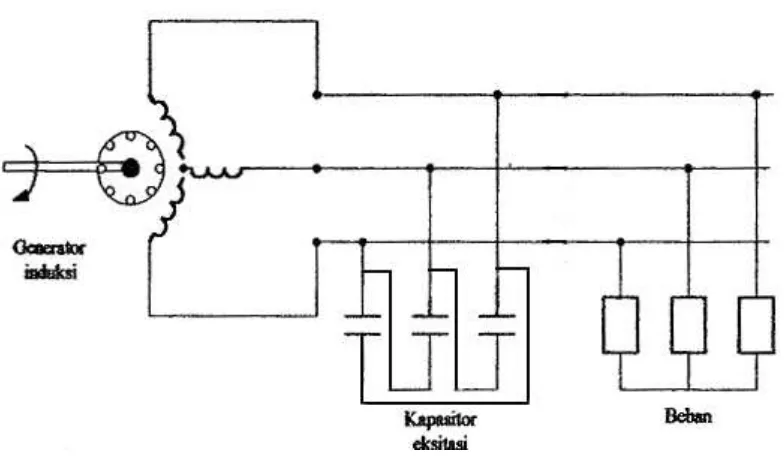
Untuk motor induksi tiga fasa yang beroperasi sebagai generator yang beroperasi sendiri, kebutuhan daya reaktif tidak dapat lagi diperoleh dari jala-jala. Untuk kondisi yang demikian, kebutuhan daya reaktif dapat diperoleh generator dari suatu unit kapasitor. Kapasitor tersebut dihubungkan pararel dengan terminal keluaran generator. Kapasitor yang terpasang harus mampu memenuhi kebutuhan daya reaktif yang dibutuhkan untuk menghasilkan fluksi di celah udara. Karena generator dapat melakukan eksitasi sendiri tanpa memerlukan sumber eksternal dari jala-jala, maka disebut juga generator induksi penguatan sendiri.
3.3. Kapasitor pada Motor Induksi Tiga Fasa Sebagai Generator
3.3.1. Umum
Kapasitor secara sederhana didefinisikan sebagai suatu peralatan yang terdiri dari dua buah keping/plat konduktor yang dipisahkan oleh suatu bahan dielektrik, yang memiliki kemampuan untuk dapat menyimpan energi listrik. Bahan-bahan dilektrik yang umumnya digunakan misalnya udara vakum, keramik, gelas, dan lainnya.
Sedangkan kapasitansi kapasitor (C) didefinisikan sebagai jumlah muatan yang mampu diterima dan disimpan oleh kapasitor untuk setiap nilai tegangan dari potensial yang diberikan. Kapasitansi kapasitor dinilai dalam satuan farad (F).
V Q
C= ………..(3.1)
dimana :
Q = muatan listrik (coulomb)
C = kapasitansi kapasitor (farad)
V = tegangan kapasitor (volt)
Kapasitor yang umumnya cocok digunakan sebagai kapasitor eksitasi pada generator induksi penguatan sendiri adalah jenis motor run, yang juga biasa digunakan pada motor induksi satu fasa. Biasanya banyak terdapat dalam ukuran 40 μF dan juga diatasnya. Penggunaan kapasitor jenis motor start harus dihindari,
kapasitor biasanya berkisar 380 – 415 V, meskipun terkadang ada juga jenis untuk ukuran 220 – 240 V.
Kapasitor terdapat dalam ukuran standard dan umumnya dispesifikasikan dengan toleransi +/- 10%. Dengan demikian, tanpa adanya dilakukan pengukuran kapasitor secara individual/perfasa, akan sulit didapatkan nilai kapasitansi yang sesuai dengan kebutuhan. Dalam penggunaannya, disarankan agar digunakan kapasitor pada rating tegangan yang lebih besar dari nilai kapasitansi yang dibutuhkan untuk pengoperasian generator. Hal ini dilakukan agar kapasitor memilki umur kerja yang lebih lama.
3.3.2. Pemasangan Kapasitor
Untuk generator induksi yang membangkitkan tegangan tiga fasa, kapasitor eksitasi dapat dihubungkan baik itu segitiga (∆) ataupun bintang (Y). bentuk sistem konfigurasi pemasangan kapasitor eksitasi tersebut dapat dilihat pada gambar di bawah.
Kapasitor yang dihubungkan bintang atau segitiga adalah mempunyai hubungan sebagai berikut :
CY
C V
V ∆ = 3⋅ ……….(3.2)
3
CY C I
I ∆ = ………(3.3)
CY CY CY CY C C C I V I V I V X ⋅ = ⋅ = = ∆ ∆ ∆ 3 3 3 CY C X
X ∆ =3⋅ ……… (3.4)
Karena C X f C ⋅ = π 2 1 ………(3.5) maka 3 Y C
C∆ = ………(3.6)
Sehingga, jika kapasitor dihubungkan bintang (Y), maka nilai kapasitansi yang dibutuhkan adalah tiga kali nilai kapasitansi bila terhubung segitiga (∆).
3.3.3. Perhitungan Besar Kapasitansi Kapasitor
agar diperoleh tegangan operasi yang sesuai dengan kebutuhan pada frekuensi yang diinginkan, besar kapasitansi untuk kapasitor eksitasi yang terpasang harus ditentukan dengan baik.
Untuk memperoleh nilai pendekatan perhitungan kebutuhan kapasitansi kapasitor eksitasi generator induksi tiga fasa dapat diperoleh melalui dua metode yaitu melalui percobaan beban nol atau data pabrikan (name plate) dari motor induksi tiga fasa.
• Percobaan Beban Nol
Data hasil percobaan beban nol dapat digunakan untuk menghitung kapasitansi eksitasi karena daya semu yang ditarik oleh motor induksi pada keadaan beban nol mendekati nilai daya reaktif yang dibutuhkan oleh mesin ketika bekerja sebagai generator pada keadaan dekat dengan beban penuhnya.
Dari data hasil percobaan beban nol, dapat dihitung nilai daya semu :
VA I V Snoload = 3⋅ 0 ⋅ 0
Σ ………. (3.7)
Dari penjelasan di atas diketahui bahwa :
VAR S
Q=Σ noload
Σ ………..(3.8)
• Data pabrikan (name plate)
Dari data yang ada pada name plate mesin, seperti tegangan operasi, arus beban penuh, dan cos φ, maka dapat dihitung daya semu pada keadaan beban penuhnya :
VA I V
S = ⋅ L ⋅ L
watt S
P=Σ cosϕ
Σ ….………..…… (3.10)
Dari persamaan segitiga daya dapat diperoleh nilai daya reaktif :
2 2
P S
Q= Σ −Σ
Σ VAR ………. (3.11)
Dari hasil perhitungan kebutuhan daya reaktif, baik itu yang diperoleh dari metode percobaan beban nol maupun data name plate motor, kemudian perhitungan dilanjutkan sebagai berikut:
Daya reaktif yang dibutuhkan per fasa :
Qfasa = 3 Q
VAR ... (3.12)
• Hubungan bintang (Y) :
VpY =
3 LY
V
Volt ... (3.13)
IpY =
pY fasa
V Q
Amp ... (3.14)
C
X =
p p I V
=
fC π 2 1, maka
CY / fasa=
f V I pY pY π
2
µF ...
(3.15)atau, f V Q fasa CY pY fasa π 2
/ = 2 =
f V
Q
pY 2π 3 2
• Hubungan segitiga (∆) :
Vp∆ = VL∆ ... (3.17)
Ip∆ =
∆
p fasa
V Q
Amp ... (3.18)
C∆/fasa=
∆ ∆
p p
fV I π
2
µF ...
(3.19)=
f V
Q
p fasa
π
2 2
∆
=
f V
Q
p 2π
3 ∆2 µF ...(3.20)
dimana:
V0/I0 = tegangan/arus line to line keadaan beban nol.
VLY = tegangan line to line kapasitor hubungan bintang (Y)
VL∆ = tegangan line to line kapasitor hubungan segitiga (∆)
VpY/IpY = tegangan per fasa kapasitor hubungan bintang (Y)
Vp∆/I p∆ = tegangan/arus per fasa kapasitor hubungan segitiga (∆)
3.4. Prinsip Kerja dan Pembangkitan Tegangan Generator Induksi
Motor induksi akan dapat dioperasikan sebagai generator, bila terdapat daya mekanis yang mampu memutar poros rotor untuk berputar lebih cepat dari kecepatan sinkronnya (medan putar). Dengan demikian dapat dikatakan bahwa motor induksi dapat dioperasikan sebagai generator bila bekerja pada slip negatif. Selain itu diperlukan juga sumber daya reaktif yang berasal dari suatu unit kapasitor eksitasi untuk kebutuhan arus magnetisasi, agar proses pembangkitan tegangan dapat terjadi.
[image:59.595.143.535.486.715.2]Gambar 3.5 memperlihatkan secara skematis prinsip kerja generator induksi penguatan sendiri. Prime mover yang digunakan untuk memutar rotor, kapasitor eksitasi yang dihubungkan segitiga yang tersambung ke terminalnya, dan daya yang dihasilkan disuplai ke beban. Rangkaian ekivalen generator induksi sendiri diperlihatkan pada gambar 3.6 (a).
Hal yang paling penting agar terjadinya pembangkitan tegangan dalam proses kerja generator induksi penguatan sendiri adalah keberadaan magnet sisa (residual magnetism) pada inti rotor atau kapasitor eksitasi yang digunakan harus mempunyai muatan listrik terlebih dahulu.
Untuk dapat memahami prinsip kerja pembangkitan tegangan dari generator induksi penguatan sendiri ini, cara paling mudah adalah dengan merepresentasikan mesin secara sederhana dalam bentuk rangkaian ekivalen dengan Xm (reaktansi magnetisasi) pararel dengan Xc (reaktansi kapasitif) dari kapasitor eksitasi dan ggl induksi yang kecil Erem dari magnet sisa yang terdapat di rotor seperti ditunjukkan pada gambar 3.6 (b).
(a)
Dimana :
R1 = tahanan stator Xm = reaktansi magnetisasi
R2 = tahanan rotor Xc = reaktansi kapasitansi
X1 = reaktansi bocor stator I1 = arus stator
X2 = reaktansi bocor rotor Ic = arus magnetisasi
(b)
Gambar 3.6. (a) Rangkaian Ekivalen per-Fasa Generator Induksi
(b) Rangkaian Penyederhanaan Rangkaian Ekivalen 3.6 (a)
Dengan berputarnya rotor, maka fluksi sisa yang terdapat di belitan rotor membentuk ggl induksi awal Erem pada belitan stator. Tegangan sebesar Erem ini, pada terminal mesin yang dihubungkan dengan kapasitor, kemudian menghasilkan arus Ia pada kapasitor. Arus Ia ini merupakan arus magnetisasi yang menghasilkan fluksi celah udara. Fluksi ini kemudian menambah jumlah fluksi yang sudah ada, sehingga kemudian menghasilkan ggl induksi di stator yang lebih besar lagi yaitu
Gambar 3.7. Proses Pembangkitan Tegangan
Nilai kapasitor yang dipasang sangat menentukan terbangkitnya tegangan atau tidak. Untuk dapat dibangkitkannya tegangan pada generator induksi, nilai kapasitor yang dipasang harus lebih besar dari nilai kapasitor minimum yang diperlukan untuk proses eksitasi. Jika kapasitor yang dipasang lebih kecil dari kapasitor minimum yang diperlukan, maka proses pembangkitan tegangan untuk nilai tegangan yang kita inginkan tidak dapat terpenuhi.
3.5. Pengaruh Pembebanan Resistif Terhadap Arus Eksitasi
Pada tugas akhir ini pembebanan yang dilakukan terhadap generator induksi dibatasi hanya pada jenis pembebanan resistif. Hal ini juga sesuai dengan kondisi nyata di lapangan dimana generator induksi kebanyakan digunakan pada pembangkit mikro hidro pada daerah-daerah terpencil, untuk melayani beban yang umumnya adalah bersifat resistif.
Berdasarkan rangkaian ekivalen gambar 3.9 (a), maka diperoleh persamaan hubungan antara tegangan keluaran dengan arus stator sebagai berikut
)
( 2 2
1
1 I R jX
E
V = − + ……… (3.21)
L C I
I
I1 = + ……….. (3.22)
dimana :
V = tegangan keluaran generator (Volt)
E1 = ggl induksi yang dibangkitkan pada stator (Volt)
I1 = arus stator (Amp)
IL = arus beban (Amp)
Pembebanan resistif merupakan pembebanan dengan faktor kerja satu, dimana beban hanya menarik arus kerja (arus aktif). Sesuai dengan persamaan (3.21), kenaikan arus beban akan memperbesar jatuh tegangan di tahanan stator dan memperbesar kebocoran fluksi di reaktansi stator, sehingga tegangan keluaran akan turun.
Penurunan tegangan keluaran akan menyebabkan arus eksitasi ikut menurun, sesuai dengan persamaan berikut :
C C
X V
I = ………(3.23)
[image:64.595.209.417.434.647.2]Proses penurunan tegangan keluaran berlangsung sampai tercapainya titik keseimbangan yang baru seperti ditunjukkan pada gambar 3.12.
Titik A merupakan titik kerja keadaan beban nol dengan tegangan sebesar V1
dan arus eksitasi sebesar OA’. Saat generator induksi dibebani, titik kerja turun menjadi titik B dengan tegangan keluaran generator sebesar V2 dan arus eksitasi
menjadi sebesar OC’. Dari arus eksitasi sebesar OC’ tersebut yang digunakan untuk eksitasi hanya sebesar OB’, sedangkan sisanya sebesar B’C’ digunakan untuk mengatasi kebocoran fluks di stator.
3.6. Keunggulan dan Kelemahan Penggunaan Motor Induksi Tiga Fasa
Sebagai Generator
Motor induksi tiga fasa yang umum digunakan sebagai generator adalah motor induksi jenis sangkar tupai (squirrel cage). Penggunaan motor induksi jenis ini sebagai generator pada pembangkit-pembangkit listrik yang menggunakan tenaga air (mikro hidro) ataupun angin dikarenakan beberapa keuntungan yang dimilikinya. Beberapa keuntungan tersebut adalah :
• Ketersediaan
Motor induksi tiga fasa lebih banyak tersedia dipasaran dibandingkan dengan generator sinkron.
• Harga
• Kesederhanaan
Motor induksi yang dipergunakan sebagai generator tidak memerlukan sistem eksitasi (sumber arus searah) dan peralatan pengatur tegangan (AVR = Automatic Voltage Regulator) seperti halnya pada generator sinkron.
• Konstruksi
Motor induksi sangkar tupai dalam penggunaannya sebagai generator memiliki konstruksi yang kokoh dan cukup sederhana dikarenakan ketiadaan slip ring.
• Perawatan
Motor induksi sebagai generator membutuhkan perawatan yang sedikit. Hal ini dikarenakan motor induksi tidak memiliki penguatan menggunakan sumber dc, yang mana apabila penguatan itu berasal dari sumber seperti baterai maka tentunya diperlukan waktu perawatan untuk pengisian (charging) ataupun penggantian baterai. Motor induksi juga umumnya tertutup penuh, hal ini menjamin perlindungan yang baik dari debu dan air. Selain itu, tidak seperti generator sinkron yang menggunakan sikat, generator induksi tidak direpotkan oleh perawatan dalam penggantian sikat ataupun pembersihan debu dari sikat karbon tersebut.
pembangkit listrik mikro hidro yang umumnya terletak di daerah – daerah terpencil.
Dalam penggunaanya sebagai generator, kita dihadapkan pada beberapa masalah mengenai kelemahan-kelemahan yang dimiliki oleh motor induksi. Kelemahan-kelemahan tersebut antara lain :
• Rating tegangan dan frekuensi
Motor induksi sebagai generator memiliki variasi tegangan dan frekuensi yang lebih lebar dibandingkan dengan generator sinkron.
• Dibutuhkan perhitungan
Motor induksi sebagai generator tidak akan bekerja (dengan baik) tanpa kapasitor eksitasi terpasang dengan nilai yang sesuai dengan kebutuhan daya reaktif mesin, sementara generator sinkron dapat dibeli dengan keadaaan yang siap pakai.
• Daya reaktif
Motor induksi sebagai generator tidak dapat memproduksi daya reaktif dengan sendirinya, tetapi membutuhkan sumber daya reaktif eksternal baik itu dari sumber jala – jala ataupun kapasitor.
3.7. Aliran Daya dan Efisiensi Generator Induksi Tiga Fasa
3.7.1. Aliran Daya
Aliran daya aktif generator induksi penguatan sendiri dapat dilihat pada gambar 3.13.
Diagram aliran daya aktif generator induksi tersebut dapat dinyatakan dengan persamaan berikut :
Pm = Pporos – PFW ... (3.24)
PAG = Pm – PRCL ...(3.25)
PL = PAG – PSCL – Pcore ...(3.26) dimana :
Pporos = daya masukan mekanis pada poros generator (watt)
Pm = daya masukan mekanis bersih (watt)
PFW = rugi-rugi gesekan dan angin (watt)
PAG = daya celah udara (watt)
PRCL = rugi-rugi tembaga rotor (watt)
PSCL = rugi-rugi tembaga stator (watt)
Pcore = rugi-rugi inti stator (watt)
[image:68.595.123.506.224.744.2]PL = daya keluaran generator (watt)
Rugi-rugi gesekan dan angin Pg+a dan rugi-rugi inti stator Pi biasanya dianggap konstan dan disebut rugi-rugi beban nol. Sedangakan rugi-rugi tembaga stator dan rotor besarnya tidak tetap tergantung arus beban.
3.7.2. Efisiensi
Efisiensi didefinisikan sebagai perbandingan dari daya keluaran (output) terhadap daya masukan (input). Daya keluaran adalah sama dengan daya masukan dikurangi dengan rugi-rugi (losses). Untuk itu, jika dua dari tiga variabel-variabel berikut diketahui (output, input, dan rugi-rugi), maka effisiensi dapat diketahui dengan menggunakan persamaan berikut ini.
Dalam persamaan efisiensi generator induksi dapat didefinisikan sebagai :
mekanik elektrik in
out G
P P P P
= =
η ………(3.27)
Atau dalam penjabarannya dengan rugi-rugi yang ada :
rugi rugi P
P
out
out G
− Σ + =
η ……….(3.28)
adalah perkalian slip dengan daya celah udara PAG. Daya celah udara ini dalam pengoperasian sebagai generator dapat dihitung sebagai berikut :
PAG = Pout + PSCL + Pcore ………..(3.29)
BAB IV
ANALISIS PERBANDINGAN REGULASI TEGANGAN DAN
EFISIENSI PADA MOTOR INDUKSI TIGA FASA SEBAGAI
GENERATOR INDUKSI ANTARA TERMINAL STATOR
HUBUNGAN STAR DENGAN DELTA
4.1. Umum
Untuk dapat melakukan analisis terhadap perbandingan reg