ANALISA PENGARUH JATUH TEGANGAN TERHADAP KERJA MOTOR INDUKSI TIGA FASA MENGGUNAKAN MATLAB
Diajukan untuk memenuhi salah satu persyaratan dalam menyelesaikan pendidikan sarjana (S-1) pada
Departemen Teknik Elektro
Oleh
Parisro Sendro
NIM : 080422007
DEPARTEMEN TEKNIK ELEKTRO
PROGRAM PENDIDIKAN SARJANA
EKSTENSI
FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA
MEDAN
KATA PENGANTAR
Puji syukur serta hormat kepada Tuhan Yang Maha Esa sumber segala pengetahuan yang telah memberikan hikmat, kekuatan, kebijaksanaan, serta bimbingan kepada penulis dalam menyelesaikan Tugas Akhir (TA) ini dengan baik dan tepat waktunya.
Tugas Akhir ini di susun sebagai salah satu syarat menyelesaikan program S-1 Jurusan Departemen Teknik Elektro di Universitas Sumatera Utara. Dalam penulisan Tugas Akhir ini penulis telah banyak mendapatkan bantuan baik moril maupun material dari berbagai pihak. Dan pada kesempatan ini perkenankanlah penulis mengucapkan terima kasih kepada :
1. Kedua Orangtua tercinta atas segala kasih sayang, pengorbanan, dukungan doa dan materi yang telah diberikan.
2. Bapak Ir. Surya Tarmizi Kasim M.Si selaku Ketua Departemen Teknik Elektro, Fakultas Teknik, Universitas Sumatera Utara.
3. Bapak Rachmad Fauzi ST,MT selaku Sekretaris Departemen Teknik Elektro, Fakultas Teknik, Universitas Sumatera Utara.
4. Bapak Ir. Panusur SML. Tobing selaku Dosen Pembimbing Tugas Akhir. 5. Asisten laboratory mesin-mesin listrik yang telah banyak membantu untuk
penyelesaian Tugas Akhir ini
6. Abang, Kakak, dan Adik yang telah memberikan masukan selama Tugas Akhir.
9. Teman-teman seperjuangan :Farel, Rizal pinem, Okta, seluruh teman-teman sekelas yang memberikan masukan dan semangat kepada penulis. Penulis tetap menyadari bahwa Tugas Akhir ini belum begitu sempurna baik dari segi materi, pengolahan maupun penyajian. Oleh karena itu, saran dan kritik yang membangun selalu penulis harapkan. Kiranya Tuhan selalu memberikan karuniaNya kepada kita semua. Akhir kata, penulis berharap semoga Tugas Akhir ini dapat bermanfaat bagi para pembaca dan bagi yang memerlukannya.
Medan, Mei 2011
Hormat Saya,
Parisro Sendro
ABSTRAK
Motor induksi adalah salah satu peralatan listrik yang sangat banyak digunakan di industry salah satunya sebagai alat pendukung produksi, sehingga dibutuhkan perawatan yang maksimal untuk menjaga efisiensi dari motor induksi tersebut. Salah satu faktor yang dapat mempengaruhi efisiensi motor induksi adalah penurunan tegangan jala-jala, didalam tulisan ini penulis akan menganalisa pengaruh perubahan tegangan jala-jala terhadap kerja motor induksi tiga fasa dengan beban bervariasi. Perubahan tegangan jala-jala terhadap motor induksi tiga fasa didalam tulisan ini dilakukan dengan simulasi menggunakan program matlab, hasil dari simulasi ini akan dianalisa untuk mengetahui seberapa besar pengaruh jatuh tegangan jala-jala dengan beban bervariasi terhadap daya input, arus input, kecepatan putar rotor,slip, daya output, rugi-rugi dan efisiensi motor induksi tiga fasa.
Hasil yang diperoleh dari simulasi dan analisa adalah dengan jatuh tegangan sebesar 0%, 2%, 4%, 6%, 8% pada beban 4 N-m yang mengalami kenaikan adalah arus input dari 6,21-6,75 amper, slip dari 5,20—5,44 %, efisiensi 20,80-22,70 % dan yang mengalami penurunan adalah kecepatan putar rotor dari 1421,99-1418,27 rpm, daya output dari 595,33-593,78 watt, Pada beban 5 N-m yang mengalami kenaikan adalah arus input dari 6,33-6,88 amper, slip dari 5,22-5,48 %, efisiensi 25,70-28,73 % dan yang mengalami penurunan adalah kecepatan putar rotor dari 1421,59-1417,78 rpm, daya output dari 743,96-741,97 watt, . Pada beban 6 N-m yang mengalami kenaikan adalah arus input dari 6,46-7,01 amper, slip dari 5,25-5,51 %, efisiensi 30-33,82 % dan yang mengalami penurunan adalah kecepatan putar rotor dari 1421,19-1417,30 rpm, daya output dari 892,50-890 watt.
DAFTAR ISI
KATA PENGANTAR ... i
ABSTRAK ... iii
DAFTAR ISI ... v
DAFTAR GAMBAR ... viii
DAFTAR TABEL ... x
BAB I PENDAHULUAN 1.1 Latar Belakang ... 1
1.2 Batasan Masalah ... 2
1.3 Tujuan Penulisan ... 2
1.4 Metode Penulisan ... 2
1.5 Sistematika Penulisan ... 3
BAB II MOTOR INDUKSI TIGA FASA 2.1Umum ... 4
2.2 Konstruksi Motor Induksi ... 7
2.2.1 Stator ... 8
2.2.2 Rotor ... 9
2.3 Medan Magnet Putar ... 10
2.4 Kecepatan Medan Magnet Putar ... 13
2.5 Prinsip Kerja ... 14
2.6 Frekuensi rotor ... 15
2.7 Torsi Motor Induksi... 16
2.9 Slip... 25
2.10 Daya Motor Induksi... 26
2.11 Rugi-rugi dan Efisiensi Motor Induksi ... 29
2.12 Jatuh Tegangan ... 30
2.13 Penjelasan Singkat Tentang Program Matlab ... 32
BAB III SIMULASI MENGGUNAKAN MATLAB 3.1 Tahapan-tahapan Simulasi ... 33
3.2 Data-data Motor Induksi ... 35
3.3 Hasil Simulasi... 36
BAB IV ANALISA HASIL SIMULASI 4.1 Analisa Perhitungan Data Hasil Simulasi ... 39
4.1.1 Beban 4 N-m ... 39
4.1.2 Beban 5 N-m ... 45
4.1.3 Beban 6 N-m ... 50
4.2 Grafik hubungan terhadap jatuh tegangan pada masing-masing beban ... 56
4.2.1 Grafik hubungan antara daya input dengan jatuh tegangan pada masing-masing beban ... 57
4.2.2 Grafik hubungan antara arus input dengan jatuh tegangan pada masing-masing beban ... 58
4.2.5 Grafik hubungan antara daya output dengan jatuh tegangan pada masing-masing beban ... 61 4.2.6 Grafik hubungan antara rugi-rugi dengan jatuh tegangan pada masing-masing beban ... 62 4.2.7 Grafik hubungan antara efisiensi dengan jatuh tegangan pada masing-masing beban ... 63 BAB V KESIMPULAN DAN SARAN
DAFTAR GAMBAR
Gambar 2-1. Klarifikasi motor listrik ... 4
Gambar 2-2. Motor induksi rotor sangkar-tupai ... 6
Gambar 2-3. Konstruksi motor induksi ... 7
Gambar 2-4. Komponen stator motor induksi ... 8
Gambar 2-5. Konstruksi rotor motor induksi sangkar-tupai ... 9
Gambar 2-6. Medan putar pada motor induksi tiga fasa ... 11
Gambar 2-7. Tegangan ekivalen thevenin pada sisi rangkaian input ... 17
Gambar 2-8. Impedansi ekivalen thevenin pada sisi rangakaian input ... 18
Gambar 2-9. Rangakain ekivalen thevenin motor induksi ... 18
Gambar 2-10. Karakteristik torsi-slip pada motor induksi ... 19
Gambar 2-11.Karakteristik torsi-putaran pada motor induksi pada berbagai daerah operasi ... 20
Gambar 2-12. Rangakain ekivalen stator ... 22
Gambar 2-13. Rangakaian ekivalen rotor ... 23
Gambar 2-14. Rangakaian ekivalen motor induksi dari sisi stator ... 23
Gambar 2-15. Rangakaian ekivalen pendekatan motor induksi ... 23
Gambar 2-16. Rangkaian ekivalen motor induksi tiga fasa ... 24
Gambar 2-17. Diagaram aliran daya motor induksi ... 28
Gambar 4-1. Grafik daya input (watt) vs jatuh tegangan (%) pada masing-masing beban ... 57 Gambar 4-2. Grafik arus input (amper) vs jatuh tegangan (%) pada masing-masing beban ... 58 Gambar 4-3. Grafik kecepatan putar rotor (rpm) vs jatuh tegangan (%) pada
masing-masing beban ... 59 Gambar 4-4. Garfik slip (%) vs jatuh tegangan (%) pada masing-masing beban ... 60 Gambar 4-5. Grafik daya output (watt) vs jatuh tegangan (%) pada masing-masing beban ... 61 Gambar 4-6. Grafik rugi-rugi (watt) vs jatuh tegangan (%) pada masing-masing
beban ... 62 Gambar 4-7. Grafik efisiensi (%) vs jatuh tegangan (%) pada masing-masing
beban ... 63
DAFTAR TABEL
Tabel 3-1. Parameter motor induksi tiga fasa ... 36
Tabel 3-2. Data hasil simulasi dengan beban 4 N-m ... 37
Tabel 3-3. Data hasil simulasi dengan beban 5 N-m ... 37
Tabel 3-4. Data hasil simulasi dengan beban 6 N-m ... 38
Tabel 4-1.Hasil perhitungan nilai slip, daya output, rugi-rugi dan efisiensi pada beban 4 N-m ... 55
Tabel 4-2. Hasil perhitungan nilai slip, daya output, rugi-rugi dan efisiensi pada beban 5 N-m ... 55
ABSTRAK
Motor induksi adalah salah satu peralatan listrik yang sangat banyak digunakan di industry salah satunya sebagai alat pendukung produksi, sehingga dibutuhkan perawatan yang maksimal untuk menjaga efisiensi dari motor induksi tersebut. Salah satu faktor yang dapat mempengaruhi efisiensi motor induksi adalah penurunan tegangan jala-jala, didalam tulisan ini penulis akan menganalisa pengaruh perubahan tegangan jala-jala terhadap kerja motor induksi tiga fasa dengan beban bervariasi. Perubahan tegangan jala-jala terhadap motor induksi tiga fasa didalam tulisan ini dilakukan dengan simulasi menggunakan program matlab, hasil dari simulasi ini akan dianalisa untuk mengetahui seberapa besar pengaruh jatuh tegangan jala-jala dengan beban bervariasi terhadap daya input, arus input, kecepatan putar rotor,slip, daya output, rugi-rugi dan efisiensi motor induksi tiga fasa.
Hasil yang diperoleh dari simulasi dan analisa adalah dengan jatuh tegangan sebesar 0%, 2%, 4%, 6%, 8% pada beban 4 N-m yang mengalami kenaikan adalah arus input dari 6,21-6,75 amper, slip dari 5,20—5,44 %, efisiensi 20,80-22,70 % dan yang mengalami penurunan adalah kecepatan putar rotor dari 1421,99-1418,27 rpm, daya output dari 595,33-593,78 watt, Pada beban 5 N-m yang mengalami kenaikan adalah arus input dari 6,33-6,88 amper, slip dari 5,22-5,48 %, efisiensi 25,70-28,73 % dan yang mengalami penurunan adalah kecepatan putar rotor dari 1421,59-1417,78 rpm, daya output dari 743,96-741,97 watt, . Pada beban 6 N-m yang mengalami kenaikan adalah arus input dari 6,46-7,01 amper, slip dari 5,25-5,51 %, efisiensi 30-33,82 % dan yang mengalami penurunan adalah kecepatan putar rotor dari 1421,19-1417,30 rpm, daya output dari 892,50-890 watt.
BAB I
PENDAHULUAN
1.1 Latar Belakang
Penggunaan motor AC yang paling luas penggunaannya adalah motor induksi tiga fasa, hampir 90% aplikasi motor pada industri menggunakan jenis motor induksi tiga fasa. Alasan utama, karena motor jenis ini memiliki struktur yang kokoh, keandalan tinggi, harga relatif murah, dan perawatan mudah. Motor induksi merupakan peralatan listrik yang sangat dibutuhkan terutama oleh kalangan industri atau komersial, sehingga harus selalu dirawat dan diperbaiki apabila terjadi kerusakan, dengan demikian diharapkan semua peralatan listrik dapat dioperasikan secara optimal
1.2 Batasan Masalah
Untuk menyederhanakan permasalah yang akan dibahas, maka penulis memfokuskan pembahasan dengan membuat batasa-batasan sebagai berikut :
1. Motor yang digunakan adalah motor induksi tiga fasa rotor sangkar 2. Tidak membahas masalah proteksi motor induksi tiga fasa akibat
jatuh tegangan jala-jala
3. Tidak membahas masalah terjadinya jatuh tegangan jala-jala
1.3 Tujuan Penulisan
Maksud dan tujuan dari penulisan ini adalah untuk mengetahui seberapa besar pengaruh jatuh tegangan jala-jala terhadap unjuk kerja motor induksi tiga fasa dengan beban bervariasi
1.4 Metodologi Penulisan
Metoda yang digunakan dalam penulisan Tugas Akhir ini adalah :
1. Studi literatur yaitu membaca teori-teori yang berkaitan dengan topik Tugas Akhir yang terdiri dari buku-buku referensi baik yang dimiliki oleh penulis atau dari perpustakan dan internet
1.5 Sistematika Penulisan
Gambaran tulisan ini secara singkat dapat diuraikan pada sistematika pembahasan sebagai berikut :
BAB I : Pendahuluan
Bab ini menguraikan latar belakang penulisan,batasan masalah, tujuan penulisan, metode penulisan dan sistematika penulisan. BAB II : Motor Induksi Tiga Fasa
Bab ini menjelaskan tentang teori motor listrik secara umum, motor induksi tiga fasa secara khusus dan jatuh tegangan
BAB III : Simulasi menggunakan Matlab
Pada bab ini menjelaskan tentang prosedur simulasi, rangkaian percobaan simulasi dan data hasil simulasi
BAB IV : Analisa hasil Simulasi
Pada bab ini menjelaskan tentang analisa data hasil simulasi dan analisa perhitungan data simulasi
BAB V : Penutup
BAB II
MOTOR INDUKSI
2.1 Umum
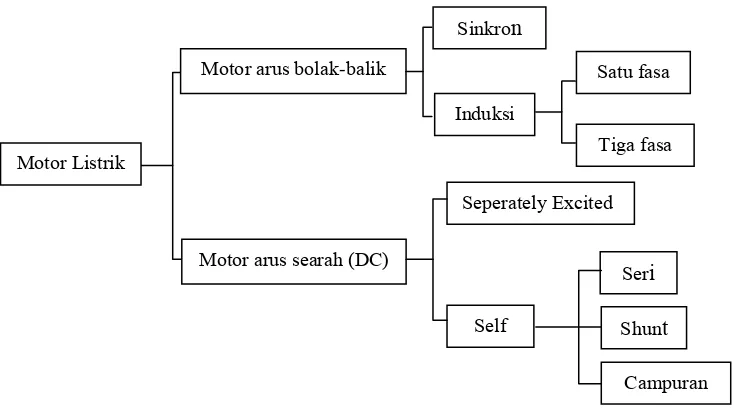
Motor-motor listrik pada dasarnya digunakan sebagai sumber beban untuk menjalankan alat-alat tertentu atau membantu manusia dalam menjalankan pekerjaannya sehari-hari, terutama dalam bidang perindustrian. Motor listrik memiliki beberapa klarifikasi berdasarkan pasokan input, konstruksi dan mekanisme operasi seperti ditunjukan dapa gambar 2.1
Gambar 2.1 Klarifikasi Motor Listrik
Karakteristik dari motor AC (alternating current) :
1. Perawatan dan perbaikan hampir tidak diperlukan.
2. Pada daya yang sama ukuran fisik lebih kecil daripada motor DC. 3. Lebih murah dibandingkan dengan motor DC.
Motor Listrik
Motorarusbolak-balik
4. Mampu berkerja pada kecepatan diatas kecepatan yang tertera pada nameplate
5. Sederhana dan konstruksinya kuat.
Motor induksi dapat diklasifikasikan menjadi dua kelompok utama seperti ditunjukan pada gambar 2.1
1. Motor induksi satu fasa. Motor ini hanya memiliki satu gulungan stator beroperasi dengan pasokan daya satu fasa, memiliki sebuah rotor sangkar tupai dan memerlukan sebuah alat untuk menghidupkan motornya. Sejauh ini motor ini merupakan jenis motor yang paling umum digunakan dalam peralatan rumah tangga, seperti kipas angin, mesin cuci dan pengering pakaian dan untuk penggunaan hingga 3 sampai 4 Hp.
2. Motor induksi tiga fasa. Medan magnet yang berputar dihasilkan oleh pasokan tiga fasa yang seimbang. Motor tersebut memiliki kemampuan daya yang tinggi jenis rotor sangkar tupai atau rotor lilitan dan penyalaan sendiri. Diperkirakan bahwa sekitar 70 % motor di industri menggunakan jenis ini sebagai contoh, pompa, kompresor, belt conveyor, jaringan listrik dan grinder. Tersedia dalam ukuran 1/3 hingga ratusan Hp.
Ada dua tipe rotor pada motor induksi tiga fasa yaitu : 1. Motor sangkar tupai ( squirrel-cage motor ). 2. Motor rotor lilitan ( wound-rotor motor ).
Gambar 2.2 Motor Induski Rotor Sangkar Tupai karakteristik motor sangkar tupai adalah sebagai berikut :
1. Rotor terdiri dari penghantar tembaga yang dipasangkan pada inti yang solid dengan ujung-ujung yang dihubung singkat.
2. Kecepatan konstan.
3. Arus start yang besar diperlukan oleh motor menyebapkan tegangan berfluktasi.
4. Arah putaran dapat dibalik dengan menukarkan dua dari tiga fasa daya utama pada motor.
5. Faktor daya cendrung buruk untuk beban yang dikurangi.
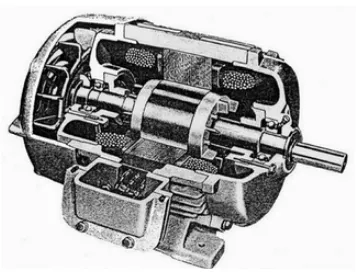
2.2 Konstruksi
Secara umum motor induksi terdiri dari rotor dan stator. Rotor merupakan bagian yang bergerak, sedangkan stator yang diam. Diantara stator dengan rotor ada celah udara (gap) yang jaraknya sangat kecil. Konstruksi motor induksi dapat dilihat pada Gambar 2.3.
Gambar 2.3 . Konstruksi Motor Induksi
Komponen stator adalah bagian terluar dari motor yang merupakan bagian yang diam dan mengalirkan arus phasa. Stator terdiri dari susunan laminasi inti yang memiliki alur (slot) yang menjadi tempat dudukan kumparan yang dililitkan dan berbentuk silindris.
Motor induksi memiliki dua komponen yang utama,kedua komponen tersebut adalah :
1. Stator (bagian yang diam) 2. Rotor (bagian yang bergerak)
transformator. Oleh sebab itu, stator kadang-kadang dianggap sebagai primer dan rotor sebagai sekunder motor.
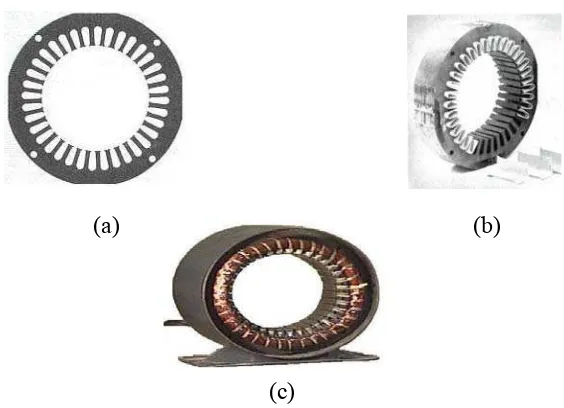
2.2.1 Stator
Inti stator terbuat dari lapis-lapis pelat baja beralur yang didukung dalam rangka stator yang terbuat dari besi tuang atau pelat baja yang di pabrikasi. Lilitan-lilitan sama halnya dengan lilitan stator dari generator sinkron, diletakkan dalam alur stator yang terpisah 120 derajat. Lilitan fasa ini bisa tersambung delta ataupun bintang. Gambar 2.4 menunjukan konstruksi dari stator
(a) (b)
(c)
Gambar 2.4. komponen stator motor induksi tiga fasa (a). lempengan inti
2.2.2 Rotor
Rotor dari motor sangkar tupai adalah konstruksi dari inti berlapis dengan konduktor dipasang paralel dengan poros dan mengelilingi permungkaan inti. Konduktornya tidak terisolasi dari inti karena arus rotor secara alamiah akan mengalir melalui tahanan yang paling kecil yaitu konduktor rotor. Pada setiap unjung rotor, konduktor rotor semuanya dihubung singkat dengan cincin ujung . konduktor rotor dan cincin ujung serupa dengan sangkar tupai yang berputar sehingga dinamakan demikian gambar 2.5 menunjukkan kontruksinya rotor motor induksi sangkar tupai.
(a) (b) Gambar 2.5. konstruksi rotor motor induksi rotor sangkar
(a).tipikal roto sangkar (b).bagian-bagian rotor sangkar
2.3 Medan Magnet Putar
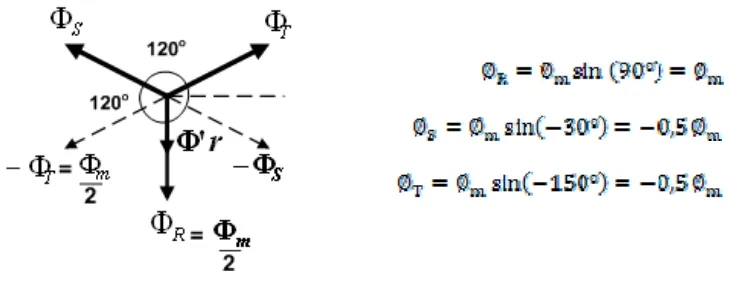
Apabila belitan stator dihubungkan dengan catu daya tiga fasa maka akan dihasilkan medan magnet yang berputar, medan magnet ini dibentuk oleh kutub – kutubnya yang berada pada posisi yang tidak tetap pada stator tetapi berubah – ubah mengelilingi stator. Adapun magnitud dari medan putar ini selalu tetap yaitu sebesar 1.5 Φm dimana Φm adalah fluks yang disebabkan suatu fasa.
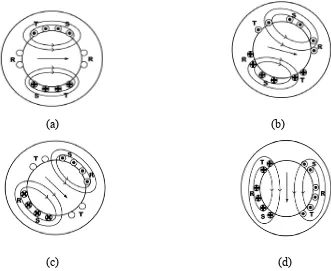
Untuk melihat bagaimana medan putar dibangkitkan, maka dapat diambil contoh pada motor induksi tiga fasa dengan jumlah kutub dua. Dimana ke-tiga fasanya R,S,T disuplai dengan sumber tegangan tiga fasa, dan arus pada fasa ini ditunjukkan sebagai IR, IS, dan IT, maka fluks yang dihasilkan oleh arus – arus ini adalah :
ΦR = Φm sin ωt………(2.1a)
ΦS = Φm sin (ωt – 1200)………..(2.1b) ΦT = Φm sin (ωt – 2400 )………..(2.1c)
(a) (b)
(c) (d) Gambar 2.6. medan putar pada motor induksi tiga fasa
(a). Pada keadaan 1 ( gambar 2. ), ωt = 0 ; arus dalam fasa R bernilai nol sedangkan besarnya arus pada fasa S dan fasa T memiliki nilai yang sama dan arahnya berlawanan. Dalam keadaan seperti ini arus sedang mengalir ke luar dari konduktor sebelah atas dan memasuki konduktor sebelah bawah. Sementara resultan fluks yang dihasilkan memiliki besar yang konstan yaitu sebesar 1,5 Φm
= 0 ; = sin (-1200) = - ;
Oleh karena itu resultan fluks, adalah jumlah phasoro dari dan -
sehingga resultan fluks, = 2 x cos 300 = 1,5
(b). Pada keadaan 2, arus bernilai maksimum negatif pada fasa S, sedangkan pada R dan fasa T bernilai 0,5 maksimum pada fasa R dan fasa T, dan pada saat ini ωt = 300,
Maka jumlah phasor ΦR dan - ΦT adalah = Φr’ = 2 x 0,5 Φm cos 60 = 0,5 Φm. Sehingga resultan fluks Φr = 0,5 Φm + Φm = 1,5 Φm.dari gambar diagram phasor tersebut dapat dilihat bahwa resultan fluks berpindah sejauh 300 dari posisi pertama
(c). Pada keadaan 3, ωt = 60o, arus pada fasa R dan fasa T memiliki besar yang sama dan arahnya berlawanan ( 0,866 Φm ),
sin (-1800) = 0
dari gambar diagram phasor tersebut dapat dilihat bahwa resultan fluks berpindah sejauh 600 dari posisi pertama
(d). Pada keadaan 4, ωt = 900, arus pada fasa R maksimum ( positif), dan arus pada fasa S dan fasa T = 0,5 Φm ,
Maka jumlah phasor - ΦT dan – ΦS adalah = Φr’ = 2 x 0,5 Φm cos 60 = 0,5 Φm. Sehingga resultan fluks Φr = 0,5 Φm + Φm = 1,5 Φm. Dari gambar diagram phasor tersebut dapat dilihat bahwa resultan fluks berpindah 900 dari posisi pertama
2.4 Kecepatan Medan Magnet Putar
Siklus = x putaran
Atau
Siklus per detik = x putaran per detik
Oleh karena putaran per detik sama dengan putaran per menit, putaran (n) dibagi 60 dan banyaknya siklus per detik adalah frekuensi (f ), maka
f = x =
n
=kecepatan putar dari medan magnet putar disebut kecepatan sinkron atau kecepatan stator dari motor.
2.5 Prinsip Kerja
Berkerjanya motor induksi bergantung pada medan magnet putar yang ditimbulkan dalam celah udara motor oleh arus stator. Lilitan stator tiga fasa di lilitkan dengan lilitan fasanya berjarak 1200
Ada beberapa prinsip kerja motor induksi :
1. Apabila sumber tegangan 3 fasa dipasangkan pada lilitan stator
timbullah medan putar dengan kecepatan Ns =
f
3. Akibat dari medan putar pada lilitan rotor timbul induksi gaya gerak listrik (ggl).
4. Karena lilitan rotor merupakan rangkaian yang cukup tertutup, ggl akan menghasilkan arus.
5. Adanya arus didalam medan magnet menimbulkan gaya pada rotor.
6. Bila torka mulai yang dihasilkan oleh gaya pada rotor cukup besar untuk memikul torka beban, rotor akan berputar searah dengan medan putar stator
7. Seperti yang telah dijelaskan pada point 3 tegangan induksi timbul karena terpotongnya batang konduktor (rotor) oleh medan putar stator, artinya agar tegangan terinduksi diperlukan adanya perbedaan relative antara kecepatan medan putar stator (Ns) dengan kecepatan berputar rotor (Nr).
8. Perbedaan kecepatan antara (Nr) dan (Ns) disebut slip dinyatakan dengan
S = x 100
9. Bila (Nr) = (Ns), tegangan tidak akan terinduksi dan arus tidak mengalir pada lilitan rotor, dengan demikian tidak dihasilkan torka. Torka motor akan timbul apabila (Nr) lebih kecil dari (Ns).
2.6 Frekuensi Rotor
Jika motor induksi 60 Hz dua kutub (kecepatan sinkron = 3600 rpm) bekerja pada slip 5 %, slip dalam putaran setiap menitnya adalah 3600 x 0,05 atau 180 rpm. Ini berarti bahwa sepasang kutub stator melewati konduktor rotor tertentu 180 kali setiap menit, atau tiga kali setiap detik. Jika sepasang kutub bergerak melewati konduktor, satu siklus ggl diinduksikan dalam konduktor. Jadi konduktor yang dikemukakan diatas akan menginduksikan ggl di dalamnya dengan frekuensi rotor menjadi 60 Hz. Maka jelaslah bahwa frekuensi rotor bergantung pada slip. Makin besar slip makin besar frekuensi rotor. Untuk setiap harga slip, frekuensi roto (fr) sama dengan frekuensi stator (fs) dikalikan dengan slip (S) yang dinyatakan dengan decimal atau
(fr) = S (fs)
Frekuensi rotor sangar berarti karena jika saja berubah maka reaktansi rotor (Xr = 2 fr Lr) juga berubah, berarti menpengaruhi karakteristik start maupun
2.7 Torsi pada motor induksi
Dari rangkaian ekivalen dan diagram aliran daya motor induksi tiga fasa yang
telah diperoleh sebelumnya dapat diturunkan suatu rumusan umum untuk torsi
induksi sebagai fungsi dari kecepatan. Torsi motor induksi diberikan oleh persamaan:
= ……….(2.2)
= ...(2.3)
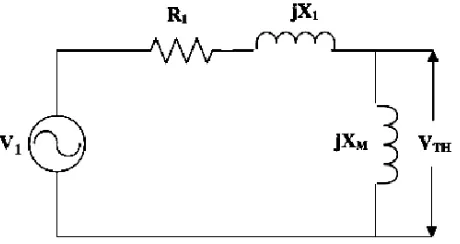
Dari gambar diatas ditunjukkan bahwa terminal di open circuit untuk mendapatkan tegangan ekivalen thevenin. Magnitud dari tegangan thevenin Vth adalah :
=
………...(2.4)Karena reaktansi magnetic Xm >> X1 dan Xm >> R1, harga pendekatan dari magnitud tegangan ekivalen thevenin :
V1 ………(2.5)
Gambar 2.8. Impedansi Ekivalen Thevenin pada Sisi Rangkaian Input Gambar diatas menunjukkan tegangan input dihubung singkat. Impedansi ekivalen thevenin dibentuk oleh impedansi paralel yang terdapat pada rangkaian Impedansi Thevenin diberikan oleh :
= + = ………(2.6)
X1
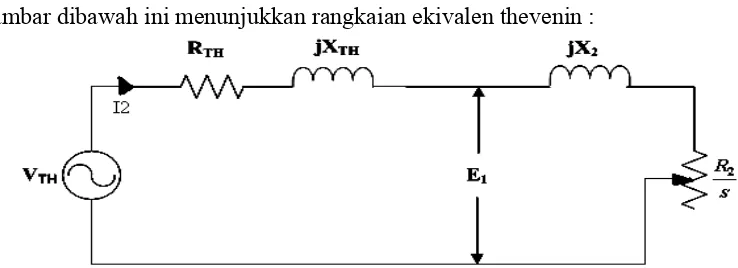
Gambar dibawah ini menunjukkan rangkaian ekivalen thevenin :
Gambar 2.9. Rangkaian Ekivalen Thevenin Motor Induksi Dari gambar diatas arus I2 diberikan oleh :
Magnitud dari arus
………..(2.7)
=
3
;
= ………(2.8)Sedangkan torsi induksi pada rotor :
=
;
= ...(2.9)Gambar 2.10. Karakteristik torsi – slip pada motor induksi
Sedangkan kurva torsi kecepatan motor induksi yang menunjukkan kecepatan diluar daerah operasi normal terlihat pada gambara dibawah ini :
Gambar 2.11. Karakteristik torsi – putaran pada motor induksi pada berbagai daerah operasi
1. Torsi motor induksi akan bernilai nol pada saat kecepatan sinkron 2. kurva torsi – kecepatan mendekati linear di antara beban nol dan
beban penuh. Dalam daerah ini, tahanan rotor jauh lebih besar dari reaktansi rotor, oleh karena itu arus rotor, medan magnet rotor, dan torsi induksi meningkat secara linear dengan peningkatan slip. 3. Akan terdapat torsi maksimum yang tak mungkin akan dapat
dilampaui. Torsi ini disebut juga dengan pull – out torque atau break down torque, yang besarnya 2 – 3 kali torsi beban penuh dari
motor.
4. Torsi start pada motor sedikit lebih besar daripada torsi beban penuhnya, oleh karena itu motor ini akan start dengan suatu beban tertentu yang dapat disuplai pada daya penuh.
5. torsi pada motor akan memberikan harga slip yang bervariasi sebagai harga kuadrat dari tegangan yang diberikan. Hal ini sangat penting dalam membentuk pengaturan kecepatan dari motor. 6. jika rotor motor induksi digerakkan lebih cepat dari kecepatan
sinkron, kemudian arah dari torsi induksi di dalam mesin menjadi terbalik dan mesin akan bekerja sebagai generator, yang mengkonversikan daya mekanik menjadi daya elektrik.
digunakan sebagai suatu cara yang sangat cepat untuk menghentikan motor induksi. Cara menghentikan motor seperti ini disebut juga dengan plugging.
2.8 Rangkaian Ekivalen Motor Induksi
Untuk menentukan rangkaian ekivalen dari motor induksi tiga phasa, pertama-tama perhatikan keadaan stator.
Gambar 2.12. Rangkaian ekivalen stator
Besarnya tegangan terminal stator berbeda dengan ggl lawan sebesar jatuh tegangan pada impedansi bocor stator, sehingga dinyatakan dengan persamaan
= + ( + j ) Volt………(2.10)
Dimana : = Tegangan terminal stator (Volt)
= ggl lawan yang dihasilkan oleh fluksi celah udara resultan (Volt)
= arus stator (Ampere)
X1 = reaktansi bocor stator (Ohm)
Kedua perhatikan rangkaian ekivalen pada rotor sebagai berikut :
Gambar 2.13 Rangkaian ekivalen rotor
= R2 + R2 ( 1 )...(2.11)
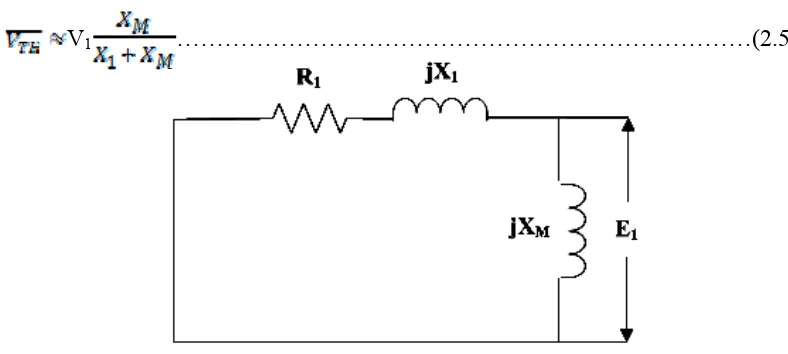
Dari penjelasan mengenai rangkaian ekivalen pada stator dan rotor di atas, maka dapat dibuat rangkaian ekivalen motor induksi tiga phasa pada masing-masing phasanya.
Gambar 2.14 Rangkaian ekivalen motor induksi dari sisi stator
2.15. Rangkaian ekivalen pendekatan motor induksi Atau seperti gambar berikut :
2.16. Rangkaian ekivalen motor induksi tiga phasa Dimana :
X’2 = X2
R’2 = R2
V1/ fasa = tegangan masuk motor / fasa R1 = tahanan stator
X1 = reaktansi stator R2 = tahanan rotor X2 = reaktansi rotor
= menggambarkan tahanan yang mewakili beban yang
merupakan fungsi dari S
Nilai parameter rangkaian ekivalen motor diperoleh dari hasil pengukuran laboratorium. Contoh penggunaan rangkaian ekivalen ini misalnya untuk menghitung efisiensi, daya keluaran dan lain-lain.
2.9 Slip
Perbedaan kecepatan putaran rotor (Nr) terhadap kecepatan medan putar stator (Ns) disebut dengan slip. Berubahnya kecepatan motor dapat mengakibatkan berubahnya besar lip 100 % pada saat start sampai 0 % pada saat diam (Nr) = (Ns). karena terjadi slip maka kecepatan relative medan putar stator terhadap putaran rotor adalah S x Ns. frekuensi tegangan yang terinduksi pada rotor sebanding dengan putaran relative medan putar stator terhadap putaran rotor. Hubungan antar frekuensi slip dapat dilihat dari persamaan berikut :
Bila f1= frekuensi
Ns = atau
f1 =
karena S = dan f1 =
maka f2 = f1. S
karena pada saat start S = 100 %, jadi f2 = f2
dengan demikian terlihat bahwa pada saat start dan rotor belum berputar, frekuensi arus rotor sama dengan frekuensi arus stator. Dalam keadaan rotor berputar, frekuensi arus rotor di pengaruhi oleh slip ( f2 = f1 . S ). Karena tegangan induksi dan reaktansi kumparan rotor merupakan fungsi frekuensi, maka besarnya juga di pengaruhi oleh slip.
E2 = 4,44. f2. N2 . m
E2 = Tegangan induksi pada saat rotor diam (start) E2s = Tegangan induksi pada saat rotor berputar N2 = Jumlah lilitan rotor
m = Fluks putaran maksimal
2.10 Daya Motor Induksi
Diagram aliran daya ditunjukkan pada gambar 2.10 untuk tipe motor induksi dan sebagai gambaran dengan jelas bagaimana daya listrik yang disuplay ke lilitan stator dirubah hingga menjadi daya mekanik pada rotor.
Daya input (Pin) pada lilitan stator = .V1.I1.cos , sebagian dari daya input ini akan hilang atau berubah menjadi panas seperti pada inti stator dan tembaga stator. Pada tembaga stator daya akan hilang kira-kira 3,5 % dan pada inti stator daya akan hilang kira-kira 2,5 % dari daya input motor induksi. Sisia tersebut kira-kira 94 % dan daya ini di transfer secara induksi melalui celah udara ke lilitan rotor. Sebagian daya yang diterima rotor kira-kira 3,5 % akan hilang atau berubah menjadi panas seperti pada tembaga rotor, sisa daya kira-kira 90,5 % dari daya input motor induksi kemudian disini daya akan hilang lagi kira-kira 2 % akibat adanya gesekan pada angin sehingga daya yang akan dikeluarkan menjadi daya mekanik kira-kira 88,5 % Pada motor induksi, tidak ada sumber listrik yang langsung terhubung ke rotor, sehingga daya yang melewati celah udara sama dengan daya yang dimasukkan ke rotor. Daya total yang dimasukkan pada kumparan stator (Pin) dirumuskan dengan
Pin=3V1I1co ...(2.12)
Dimana :
= Perbedaan sudut phasa antara arus masukan dengan tegangan sumber
Sebelum daya ditransfer melalui celah udara, motor induksi mengalami rugi-rugi berupa rugi-rugi tembaga stator (PSCL) dan rugi-rugi inti stator (PC). Daya yang di transfer melalui celah udara (PAG) sama dengan penjumlahan rugi-rugi tembaga rotor (PRCL) dan daya yang dikonversi (Pconv). Daya yang melalui celah udara ini sering juga disebut sebagai daya input rotor.
PAG = PRCL + Pconv (Watt)...(2.13)
= 3(I’2)2 = 3(I’2)2 R’2 + 3(I’2)2 R’2 ...(2.14)
2.17. Diagram aliran daya motor induksi
Dimana :
- PSCL = rugi - rugi tembaga pada belitan stator (Watt)
- Pc = rugi - rugi inti pada stator (Watt)
- PSLL = stray losses (Watt)
- PCONV = daya mekanis keluaran (output) (Watt)
Hubungan antara rugi-rugi tembaga rotor dan daya mekanis dengan daya masukan rotor dinyatakan dengan persamaan sebagai berikut :
PRCL = 3 (I’2)2 R’2 = sPAG (watt)...(2.15)
Pconv = 3 (I’2)2 R’2 = (1 – s) sPAG (watt)...(2.16)
Dari gambar 8.1 dapat dilihat bahwa motor induksi juga mengalami rugi-rugi gesek + angin (PG+A), sehingga daya mekanis keluaran sama dengan daya yang dikonversi (PCONV) dikurangi rugi-rugi gesek + angin.
Pout = Pconv – PG+A
Secara umum, perbandingan komponen daya pada motor induksi dapat dijabarkan dalam bentuk slip yaitu
PAG : PRCL : Pconv = 1 : s : 1 – s
2.11 Rugi-rugi dan Efisiensi Motor Induksi
Adapun rugi-rugi yang terdapat pada motor induksi dapat didefinisikan dari persamaan-persamaan berikut :
Rugi tembaga stator Pts = 3. . R1
Rugi inti
Rugi tembaga rotor Ptr = 3. . R2
Atau Ptr = S. Pcu Daya celah udara
Pcu = 3. .
Atau dari gambar 2.10 diatas Pcu = Pin – Pts - Pi Daya mekanik
Pmek = Pcu - Ptr
Pmek = 3. . - 3. . R2
Pmek = 3. .
Pmek = Ptr x
Sehingga daya keluaran Pout = Pmek – Pag - Pb Adapun efisiensi motor induksi
= Pts + Pi + Ptr + Pag + Pb
2.12 Jatuh Tegangan (Voltage Drop = Vd)
Jatuh tegangan adalah selisih antara tegangan ujung pengirim dan tegangan ujung penerimaan, jatuh tegangan disebabkan oleh hambatan dan arus pada saluran bolak-balik besarnya tergantung dari impedansi dan admitansi saluran serta pada beban dan faktor daya. Jatuh tegangan dinyatakan dengan rumus :
Vd = x 100 %
Dimana :
Vs = Tegangan ujung pengirim (volt) Vr = Tegangan ujung penerima (volt)
Seperti kita ketahui PLN memproduksi tegangan listrik dengan nilai nominal 220/380 volt tiga fasa dan pada frekuensi 50 Hz dan dalam bentuk gelombang sinus. Besar tegangan listrik ini berbeda pada setiap Negara, sebagai contoh di America tegangan jala-jalanya 110/60 Hz, dan lain-lain
Dalam penyedian tenaga listrik disyarakan suatu level standard tertentu untuk menentukan kualitas tegangan pelayanan. Secara umum ada tiga hal yang perlu dijaga kualitasnya :
1. Frekuensi (50 Hz)
Dalam penyediaan tenaga listrik dilakukan penggolongan beban untuk memenuhi keandalan dari sistem. Dengan bervariasinya karakteristik beban maka perlu digolongkan berdasarkan faktor-faktor dominan. Misalnya lingkungan/geografis. Pada kenyataannya tegangan listrik produk PLN bukanlah tegangan sinus murni yang berkualitas sempurna.
Faktor-faktor yang mendasari bervariasinya tegangan sistem distribusi adalah :
1. Konsumen pada umumnya memakai peralatan yang memerlukan tegangan tertentu
2. Letak konsumen terbesar, sehingga jarak tiap konsumen dengan titik pelayanan tidak sama
3. Pusat pelayanan tidak dapat diletakkan merata atau tersebar
Faktor-faktor diatas dapat menyebabkan tegangan yang diterima konsumen tidak selalu sama. Konsumen yang letaknya jauh dari titik pelayanan akan cenderung menerima tegangan relative lebih rendah dibandingkan dengan konsumen yang letaknya decant dengan pusat pelayanan.
2.13 Penjelasan Singkat Matlab
pada proyek LINSPACK dan EISPACK. Selanjutnya menjadi sebuah aplikasi untuk komputasi matrix.
Simulink (simulation and Link) adalah merupakan salah satu dari fitur yang ada pada matlab, simulink bekerja dengan menawarkan pemodelan, simulasi dan analisis system dinamis pada sebuah lingkungan Graphical User Interface (GUI) atau sebuah sarana interkasi antara operator dengan computer. Didalam fitur simulink terdiri dari beberapa Blockset salah satunya yang digunakan untuk pemodelan dan simulasi untuk system tenaga adalah Power System Blockset (PSB).
BAB III
SIMULASI MENGGUNAKAN MATLAB
Pada bab ini merupakan penjelasan tahapan-tahapan simulasi,data motor induksi dan hasil simulasi pada setiap bebannya. Pada tahapan-tahapan simulasi menerangkan blok diagram, single line diagram dan langkah-langkah simulasi. Blok diagram yaitu untuk memahami rangkaian secara garis besar atau menyeluruh. Single line diagram yaitu diagram satu garis yang menjelaskan semua rangkaian lengkap dengan komponen-komponennya dimulai dari sumber yang menyuplai tegangan ke motor dan torsi yang pada tugas akhir ini di jadikan beban dan keluaran dari motor yang berupa kecepatan dan arus input tetapi hanya satu garis saja. Langkah-langkah simulasi merupakan cara yang harus dilakukan untuk membuat rangkaian merubah variable tegangan dan beban pada simulink matlab
3.1 Tahapan-Tahapan Simulasi
Tahapan–tahapan simulasi menerangkan blok diagram, single line diagram dan langkah-langkah simulasi.
Blok diagram merupakan pemahaman secara keseluruhan atau secara garis besar, untuk melihat susunan dari blok diagram dari rangkaian dapat dilihat pada gambar 3.1
Gambar 3.1 Blok diagram analisa pengaruh jatuh tegangan terhadap kerja motor induksi tiga fasa
Sumber AC merupakan penyuplai tegangan ke motor yang merupakan bagian utama dan mempunyai nilai parameter-parameter dan spesifikasi dari motor itu sendiri. Motor tersebut akan mempunyai keluaran, pada tugas akhir ini penulis hanya membahas keluaran kecepatan dan arus input dari motor.
Singel Line Diagram merupakan diagram satu garis dari keseluruhan
rangkaian yang dapat dilihat pada gambar 3.2
Sumber AC merupakan penyuplai tegangan ke motor yang merupakan bagian utama dan memproses masuknya tegangan dengan bagian yang terdapat di dalam motor , Torsi N-m merupakan beban yang bervariabel yang nantinya akan dirobah menjadi 4,5 dan 6. Motor mempunyai keluaran dan pada tugas akhir ini penulis hanya membahas keluaran kecepatan dan arus input dari motor.
Langkah-langkah simulasi dapat kita lihat dari uraian dibawah ini sebagai berikut: 1. Membuat rangkaian simulasi pada program Matlab.
2. Memasukkan data motor induksi tiga fasa pada rangkaian. 3. Menjalankan rangkaian simulasi.
4. Merobah nilai variable tegangan input motor induksi tiga fasa dan beban motor induksi tiga fasa.
5. Mengamati dan menganalisa hasil simulasi.
3.2 Data Motor Induksi
Data dari motor induksi dapat kita lihat dari nameplate yang tertera di body motor tersebut. Spesifikasi dari motor induksi squirrel-cage terdapat dibawah ini :
1. Motor induksi tiga fasa, degan spesifikasi :
Rotor : squirrel-cage
Nr : 1422 rpm
P : 4
Tabel 3.1. Parameter motor induksi tiga fasa
No Parameter Nilai (ohm)
1 Resistansi stator 0.6116
2 Resistansi rotor 0.4833
3 Reaktans stator 0.8452
4 Reaktans rotor 0.8452
5 Reaktans magnetic 290,212
3.3 Hasil Simulasi
Hasil simulasi diperoleh dari hasil simulasi rangkaian simulasi analisa pengaruh jatuh tegangan terhadap unjuk kerja motor induksi tiga fasa. Dengan kondisi motor induksi diberi beban yang dimulasi dari 4 N-m, 5 N-m, 6 N-m dengan sumber tegangan mengalami jatuh tegangan yang dimulai dari 0%, 2%, 4%, 6% dan 8% dari tegangan nominal PLN. Kemudian hasil simulasi dicatat pada tabel data. Data hasil simulasi ditunjukkan pada tabel data dibawah ini.
1. Beban 4 N-m
Tabel 3.2 Data hasil simulasi dengan beban 4 N-m
Vd (%) 0 % 2 % 4 % 6 % 8 %
Vl-l 380 372,4 364,8 357,2 349,6 Pin 2942 2857 2779 2698 2615 Iin 6,21 6,33 6,47 6,61 6,75 Nr (rpm) 1421,99 1421,19 1420,25 1419,30 1418,27
2. Beban 5 N-m
Pada beban ini diberikan sumber tegangan nominal PLN, sumber tegangan ini dirobah seolah-olah mengalami jatuh tegangan sebanyak 2 %, 4 %, 6 % dan 8 % hasilnya ditunjukkan pada table dibawah ini :
Tabel 3.3 Data hasil simulasi dengan beban 5 N-m
Vd (%) 0 % 2 % 4 % 6 % 8 %
Vl-l 380 372,4 364,8 357,2 349,6 Pin 2894 2832 2747 2668 2582 Iin 6,33 6,46 6.59 6.74 6.88 Nr (rpm) 1421,59 1420,76 1419,81 1418,84 1417.78
3. Beban 6 N-m
Tabel 3.4 Data hasil simulasi dengan beban 6 N-m
Vd (%) 0 % 2 % 4 % 6 % 8 %
BAB IV
ANALISA HASIL SIMULASI
Pada bab ini Penulis akan mencoba menganalisa pengaruh perubahan tegangan jala-jala terhadap unjuk kerja motor induksi tiga fasa jenis squirrel-cage saat beroperasi. Dengan menggunakan cara yang sistematis nantinya dapat diketahui seberapa besar pengaruh jatuh tegangan jala-jala terhadap unjuk kerja dari motor induksi tersebut. Untuk mendapatkan data yang falit dan nyata maka Penulis mencoba menguji motor induksi tiga fasa rotor sangkar tupai 3000 Watt. Data dari hasil pengukuran ini kemudian digunakan untuk menganalisa seberapa besar pengaruh jatuh tegangan jala-jala terhadap kecepatan putar rotor (Nr), arus input motor (Iin), daya input motor (Watt). Selanjutnya data-data dari hasil pengukuran tersebut dipakai untuk perhitungan slip motor, daya output motor, rugi daya total dan efisiensi motor akibat adanya jatuh tegangan jala-jala.
4.1 Analisa Perhitungan Data Hasil Simulasi
Analisa ini bertujuan untuk mengetahui seberapa besar pengaruh jatuh tegangan terhadap slip, daya output, rugi-rugi dan efisiensi motor induksi tiga fasa dan analisa ini dilakukan pada setiap beban.
4.1.1. Beban 4 N-m
1) Pada 0 % (sesuai data tabel 3.2)
Ns =
Ns = = 1500 rpm
b) Slip
S (%) = x 100 %
S (%) = x 100 % = 5,2 %
c) Daya output Pout = Tb.
=
=
=
Pout = 4 x 148,83 = 595,33 watt d) Rugi-rugi
= Pin - Pout
2265,67 watt
e) Efisiensi
η (%) = x 100 %
2) Pada 2 % (sesuai tabel 3.2)
a) Kecepatan medan putar stator
Ns =
Ns = = 1500 rpm
b) Slip
S (%) = x 100 %
S (%) = x 100 % = 5,25 %
c) Daya output Pout = Tb.
=
=
=
Pout = 4 x 148,75 = 595 watt d) Rugi-rugi
= Pin - Pout
2262 watt
e) Efisiensi
η (%) = x 100 % = 20,82 %
3) Pada 4 % (sesuai data tabel 3.2)
a) Kecepatan medan putar stator
Ns =
Ns = = 1500 rpm
b) Slip
S (%) = x 100 %
S (%) = x 100 % = 5,31 %
c) Daya output Pout = Tb.
=
= = 148,65
Pout = 4 x 148,65 = 594,61 watt d) Rugi-rugi
= Pin - Pout
e) Efisiensi
η (%) = x 100 %
η (%) = x 100 % = 21,39 %
4) Pada 6 % (sesuai data tabel 3.2)
a) Kecepatan medan putar stator
Ns =
Ns = = 1500 rpm
b) Slip
S (%) = x 100 %
S (%) = x 100 % = 5.38 %
c) Daya output Pout = Tb.
=
= = 148,55
Pout = 4 x 148,55 = 594,21 watt d) Rugi-rugi
2103,79 watt
e) Efisiensi
η (%) = x 100 %
η (%) = x 100 % = 22,02 %
5) Pada 8 % (sesuai data tabel 3.2)
a) Kecepatan medan putar stator
Ns =
Ns = = 1500 rpm
b) Slip
S (%) = x 100 %
S (%) = x 100 % = 5,44 %
c) Daya output Pout = Tb.
=
d) Rugi-rugi
= Pin - Pout
2021,22 watt
e) Efisiensi
η (%) = x 100 %
η (%) = x 100 % = 22,70 %
4.1.2 Beban 5 N-m
1) Pada 0 % (sesuai data tabel 3.3)
a) Kecepatan medan putar stator
Ns =
Ns = = 1500 rpm
b) Slip
S (%) = x 100 %
S (%) = x 100 % = 5,22 %
=
= = 148,79
Pout = 5 x 148,79 = 743,96 watt d) Rugi-rugi
= Pin - Pout
2150 watt
e) Efisiensi
η (%) = x 100 %
η (%) = x 100 % = 25,70 %
2) Pada 2 % (sesuai data tabel 3.3)
a) Kecepatan medan putar stator
Ns =
Ns = = 1500 rpm
b) Slip
S (%) = x 100 %
c) Daya output Pout = Tb.
=
= = 148,70
Pout = 5 x 148,70 = 743,53 watt d) Rugi-rugi
= Pin - Pout
2088,47 watt
e) Efisiensi
η (%) = x 100 %
η (%) = x 100 % = 26,25 %
3) Pada 4 % (sesuai data tabel 3.3)
a) Kecepatan medan putar stator
Ns =
b) Slip
S (%) = x 100 %
S (%) = x 100 % = 5,34 %
c) Daya output Pout = Tb.
=
= = 148,60
Pout = 5 x 148,60 = 743,03 watt d) Rugi-rugi
= Pin - Pout
2003 watt
e) Efisiensi
η (%) = x 100 %
η (%) = x 100 % = 27,04 %
4) Pada 6 % (sesuai data tabel 3.3)
Ns =
Ns = = 1500 rpm
b) Slip
S (%) = x 100 %
S (%) = x 100 % = 5,41 %
c) Daya output Pout = Tb.
=
= = 148,50
Pout = 5 x 148,50 = 742,52 watt d) Rugi-rugi
= Pin - Pout
1925,48 watt
e) Efisiensi
η (%) = x 100 %
5) Pada 8 % (sesuai data tabel 3.3)
a) Kecepatan medan putar stator
Ns =
Ns = = 1500 rpm
b) Slip
S (%) = x 100 %
S (%) = x 100 % = 5,48 %
c) Daya output Pout = Tb.
=
= = 148,39
Pout = 5 x 148,39 = 741,97 watt d) Rugi-rugi
= Pin - Pout
1840 watt
e) Efisiensi
η (%) = x 100 % = 28,73 %
4.1.3 Beban 6 N-m
1) Pada 0 % (sesuai data tabel 3.4)
a) Kecepatan medan putar stator
Ns =
Ns = = 1500 rpm
b) Slip
S (%) = x 100 %
S (%) = x 100 % = 5,25 %
c) Daya output Pout = Tb.
=
= = 148,75
Pout = 6 x 148,75 = 892,50 watt d) Rugi-rugi
2082,5 watt
e) Efisiensi
η (%) = x 100 %
η (%) = x 100 % = 30 %
2) Pada 2 % (sesuai data tabel 3.4)
a) Kecepatan medan putar stator
Ns =
Ns = = 1500 rpm
b) Slip
S (%) = x 100 %
S (%) = x 100 % = 5,31 %
c) Daya output Pout = Tb.
Pout = 6 x 148,66 = 891,97 watt d) Rugi-rugi
= Pin - Pout
1998 watt
e) Efisiensi
η (%) = x 100 %
η (%) = x 100 % = 30,86 %
3) Pada 4 % (sesuai data table 3.4)
a) Kecepatan medan putar stator
Ns =
Ns = = 1500 rpm
b) Slip
S (%) = x 100 %
S (%) = x 100 % = 5,37 %
=
= = 148,56
Pout = 6 x148,56 = 891,36 watt d) Rugi-rugi
= Pin - Pout
1910,64 watt
e) Efisiensi
η (%) = x 100 %
η (%) = x 100 % = 35,16 %
4) Pada 6 % (sesuai data tabel 3.4)
a) Kecepatan medan putar stator
Ns =
Ns = = 1500 rpm
b) Slip
c) Daya output Pout = Tb.
=
= = 148,45
Pout = 6 x 148,45 = 890,73 watt d) Rugi-rugi
= Pin - Pout
1825,27 watt
e) Efisiensi
η (%) = x 100 %
η (%) = x 100 % = 32,79 %
5) Pada 8 % (sesuai data tabel 3.4)
a) Kecepatan medan putar stator
Ns =
b) Slip
S (%) = x 100 %
S (%) = x 100 % = 5,51 %
c) Daya output Pout = Tb.
=
= = 148,34
Pout = 6 x 148,34 = 890 watt d) Rugi-rugi
= Pin - Pout
1741 watt
e) Efisiensi
η (%) = x 100 %
Tabel 4.1 Hasil perhitungan nilai slip, daya output, rugi-rugi dan efisiensi pada
Tabel 4.3 Hasil perhitungan nilai slip, daya output, rugi-rugi dan efisiensi pada
4.2 Grafik hubungan terhadap jatuh tegangan pada masing-masing beban
4.2.1 Hubungan antara daya input dengan jatuh tegangan pada masing-masing beban
Gambar 4.1 Daya input (watt) vs jatuh tegangan (%) pada masing-masing beban
4.2.2 Hubungan antara arus input dengan jatuh tegangan jala-jala pada masing-masing beban
Gambar 4.2 Arus input (ampere) vs jatuh tegangan (%) pada masing-masing beban
4.2.3 Hubungan antara kecepatan putar rotor dengan jatuhtegangan pada masing-masin beban
Gambar 4.3 Kecepatan putar rotor (rpm) vs jatuh tegangan (%) pada masing-masing beban
4.2.4 Hubungan antara slip dengan jatuh tegangan pada masing-masing beban
Gambar 4.4. Slip (%) vs jatuh tegangan (%) pada masing-masing beban
4.2.5 Hubungan antara daya output dengan jatuh tegangan pada masing-masing beban
Gambar 4.5 Daya output (watt) vs jatuh tegangan (%) pada masing-masing beban
4.2.6 Hubungan antara rugi-rugi dengan jatuh tegangan pada masing-masing beban
4.2.7 Hubungan antar efisiensi dengan jatuh tegangan pada masing-masing beban
Gambar 4.7. Efisiensi (%) vs jatuh tegangan (%) pada masing-masing beban
BAB V
KESIMPULAN DAN SARAN
Pada bab ini menerangkan kesimpulan dan saran, pada kesimpulan merupakan pembahasan hasil simulasi rangkaian pada simulink matlab dan analisa perhitungan. Saran merupakan sebuah cara untuk menjaga agar tegangan tetap stabil dan tidak mengalami jatuh tegangan.
5.1 KESIMPULAN
Dari hasil simulasi dan analisa data, maka penulis dapat menyimpulkan beberapa hal yaitu sebagai berikut :
1) Berdasarkan hasil simulasi saat diberi jatuh tegangan pada motor induksi tiga fasa maka arus input, slip, daya output dan efisiensi motor induksi tiga fasa akan semakin besar.
2) Berdasarkan hasil simulasi saat diberi jatuh tegangan pada motor induksi tiga fasa maka kecepatan putar rotor, daya input, daya output motor induksi tiga fasa akan semakin kecil.
3) Berdasarkan hasil simulasi saat diberi beban semakin besar pada motor induksi tiga fasa maka daya input, arus input, slip, daya output, motor induksi tiga fasa akan semakin besar.
4) Berdasarkan hasil simulasi saat diberi beban semakin besar pada motor induksi tiga fasa maka kecepatan putar rotor motor induksi tiga fasa akan semakin kecil.
5.2 SARAN
DAFTAR PUSTAKA
1. Sumanto,“Motor Arus Bolak-Balik (Motor AC)”, Penerbit Andi Offset, Yogyakarta
2. B.L Theraja. A.K Theraja,“A Text Book Of Electrical Technology”, Nurja Construction & Deveploment, New Delhi, 1989
3. Wijaya Mocthar,“ Dasar-Dasar Mesin Listrik”, Penerbit Djambat.
4. Zuhal,“Dasar Tenaga Listrik “,Cetakan kedua, Penerbit ITB, Bandung 1991
5. Wijaya Mochtar,“Dasar-Dasar Mesin Listrik”, Penerbit Djambatan, Jakarta,2001
6. Hanafi Gunawan, ir, Drs, 1993,“Mesin dan Rangkaian Listrik”, Penerbit Erlangga, Jakarta.
7. Gunaidi Abdia Away,2006,”MATLAB”,Penerbit Informatika, Bandung. 8. Fitzgerald,”ELECTRIC MACHINERY”, Third
Edition,McGraw-Hill,Inc, 1952
0 0.2 0.4 0.6 0.8 1 0
50 100
Selected signal: 50 cycles. FFT window (in red): 1 cycles
Time (s)
Fundamental (50Hz) = 45.74 , THD= 60.91%
0 0.2 0.4 0.6 0.8 1
Selected signal: 50 cycles. FFT window (in red): 1 cycles
Time (s)
Fundamental (50Hz) = 29.37 , THD= 93.20%
M
Selected signal: 50 cycles. FFT window (in red): 1 cycles
Time (s)
Fundamental (50Hz) = 35.76 , THD= 56.92%