TUGAS AKHIR
ANALISA PENGARUH BESAR NILAI KAPASITOR EKSITASI
TERHADAP KARAKTERISTIK BEBAN NOL DAN BERBEBAN
PADA MOTOR INDUKSI SEBAGAI GENERATOR ( MISG )
PENGUATAN SENDIRI
( Aplikasi pada Pusat Pengembangan dan Pemberdayaan
Pendidik dan Tenaga Kependidikan )
Diajukan untuk memenuhi salah satu persyaratan dalam menyelesaikan pendidikan sarjana (S-1) pada
Departemen Teknik Elektro
O l e h
MUHAMMAD HABIBI LUBIS
NIM: 070402077
DEPARTEMEN TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA
MEDAN
ANALISA PENGARUH BESAR NILAI KAPASITOR EKSITASI
TERHADAP KARAKTERISTIK BEBAN NOL DAN BERBEBAN
PADA MOTOR INDUKSI SEBAGAI GENERATOR ( MISG )
PENGUATAN SENDIRI
( Aplikasi pada Pusat Pengembangan dan Pemberdayaan
Pendidik dan Tenaga Kependidikan )
Oleh :
MUHAMMAD HABIBI LUBIS
NIM: 070402077
Disetujui oleh :
Pembimbing,
Ir.Masykur Sjani, M.T. NIP. 195110301981031001
Diketahui oleh :
KETUA DEPARTEMEN TEKNIK ELEKTRO
FT USU,
Ir. Surya Tarmizi Kasim, M.Si. NIP : 195405311986011002
DEPARTEMEN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA MEDAN
ABSTRAK
Motor induksi merupakan salah satu penggerak yang paling sering
digunakan dalam aplikasi industri. Disamping fungsinya sebagai penggerak,
motor induksi juga dapat dijadikan sebagai generator atau sering juga disebut
dengan Motor Induksi Sebagai Generator (MISG). Secara umum konstruksi motor
induksi adalah sama dengan konstruksi generator induksi, hanya saja dalam
pengoperasiannya generator induksi kecepatan putaran rotor harus di atas
kecepatan medan putar stator (ns<nr), yang berarti slip bernilai negatif. Tidak
hanya itu saja, motor induksi tersebut juga memerlukan kapasitor untuk
menyediakan daya reaktif.
MISG memiliki kekurangan dalam hal efisiensi dan regulasi tegangan.
Oleh karena itu pada penelitian kali ini akan dianalisis karakteristik motor induksi
tiga fasa yang dioperasikan sebagai generator. MISG dioperasikan dalam keadaan
beban nol dan keadaan berbeban dengan berbagai nilai kapasitor eksitasi yang
telah ditentukan untuk mendapatkan besaran – besaran seperti parameter mesin ,
putaran, frekuensi, tegangan, arus, faktor daya, dan daya serta pengaruh parameter
mesin terhadap regulasi dan efisiensi MISG. Pengujian ini dapat dilakukan pada
Laboratorium Pusat Pengembangan dan Pemberdayaan Pendidik dan Tenaga
KATA PENGANTAR
Puji syukur alhamdulillah penulis panjatkan kehadirat ALLAH SWT atas
rahmat dan karunia yang dilimpahkan sehingga dapat menyelesaikan Tugas Akhir
ini dengan judul “Analisa Pengaruh Besar Nilai Kapasitor Eksitasi Terhadap
Karakteristik Beban Nol dan Berbeban Pada Motor Induksi sebagai
Generator Penguatan Sendiri”. Adapun Tugas Akhir ini dibuat untuk
memenuhi syarat kesarjanaan di Departemen Teknik Elektro, Fakultas Teknik
Universitas Sumatera Utara.
Tugas akhir ini penulis persembahkan kepada yang teristimewa yaitu
ayahanda alm H. Alian Lubis, ibunda tercinta Suriani, kakakku tercinta
Prof.Dr.Dra.Hj.Arnita Zainoeddin, MSi beserta keluarga, abangda tercinta M. Ika
Andri beserta kakanda iparku Dhani, dan kedua adikku yang sangat kusayangi M.
Hambali Lubis & M. Reza Ulfi Lubis, saudaraku Dedi Iskandar Ananta Syahputra
serta seluruh keluarga besar lainnya yang merupakan bagian dari hidup penulis
yang senantiasa mendukung dan mendoakan penulis dari sejak lahir hingga
sekarang, dan teristimewa Eka Rezki Nopianty yang telah banyak membantu
penulis.
Selama masa perkuliahan sampai masa penyelesaian tugas akhir ini,
penulis banyak memperoleh bimbingan dan dukungan dari berbagai pihak. Untuk
itu, dengan setulus hati penulis menyampaikan ucapan terima kasih yang
1. Bapak Ir. Masykur Sjani, MT selaku dosen Pembimbing Tugas Akhir
penulis, atas segala bimbingan, pengarahan, nasehat serta motivasi dalam
menyelesaikan Tugas Akhir ini.
2. Bapak Ir. Sihar Panjaitan, MT selaku dosen Wali penulis, atas bimbingan
dan arahannya dalam menyelesaikan perkuliahan.
3. Bapak Ir. Surya Tarmidzi Kasim, MSi selaku Ketua Departemen Teknik
Elektro FT-USU dan Bapak Rachmat Fauzi ST, MT selaku Sekretaris
Departemen Teknik Elektro FT-USU.
4. Keluarga besar Laboratorium Pengukuran Listrik Bapak Ir. Masykur
Sjani, MT, Bang Penson, bang Mudhin, Kukutch, Noe, Mas Dodos dan
adik-adik 09 Agung, Rizal, Tondy, Dimas dan ibu rumah tangga Siska,
atas kebersamaannya serta segala masukan, motivasi, dan doanya.
5. Keluarga besar Laboratorium Konversi Energi Listrik, terutama Bang
Isroy Tanjung, ST sebagai Staff Administrasi Laboratorium Konversi
Energi Listrik yang telah banyak membantu penulis, juga kepada para
asisten Ardi ‘kawan KP awak’, Aji, Syamamil, dek Fahdi, Sarif sarap,
Rizky, dan adik awak Arfan atas masukan-masukan, bantuan dan doanya.
6. Seluruh Staf Pengajar di Departemen Teknik Elektro USU dan Karyawan
di Jurusan Teknik Elektro.
7. Teman-teman kuliah dan IMTE, Ketua Ajir, oki, ichan, bayu ganjang,
acer, cimet, ramces, aan, tony, roveh, ali cupetong, bintat, nyeck nyobel,
dan teman-teman SMA, serta teman-teman lain yang tidak bisa saya
yang diberikan. Nama kalian akan selalu terpatri dalam hati sanubari
penulis.
8. Adik-adik stambuk yang banyak membantu.
9. Seluruh Mahasiswa Teknik Elektro USU.
Akhir kata, tugas akhir ini masih jauh dari kesempurnaan, masih banyak
kesalahan dan kekurangan, namun penulis tetap berharap semoga tugas akhir ini
bisa bermanfaat dan memberikan inspirasi bagi pengembangan selanjutnya.
Medan, 28 November 2012
DAFTAR ISI
ABSTRAK...i
KATA PENGANTAR...ii
DAFTAR ISI ... v
DAFTAR GAMBAR ... ix
DAFTAR TABEL ... xii
BAB I PENDAHULUAN 1.1 Latar Belakang Masalah ... 1
1.2 Tujuan dan Manfaat Penulisan ... 2
1.3 Batasan Masalah ... 2
1.4 Metode Penulisan ... 4
1.5 Sistematika Penulisan ... 4
BAB II MOTOR INDUKSI TIGA PHASA 2.1 Umum ... 7
2.2 Konstruksi Motor Induksi Tiga Phasa ... 8
2.3 Medan Putar ... 11
2.3.1 Analisis Secara Vektor ... ………13
2.4 Prinsip Kerja Motor Induksi Tiga Phasa ... 14
2.5 Rangkaian Ekivalen Motor Induksi ... 16
2.5.1 Rangkaian Ekivalen Stator ... ………16
2.6 Aliran Daya Motor Induksi ... 22
2.7 Efisiensi Motor Induksi Tiga Phasa ... 25
2.8 Disain Motor Induksi Tiga Phasa ... 26
2.9 Penentuan Parameter Motor Induksi ... 28
2.9.1 Pengujian Tanpa Beban ... 28
2.9.2 Pengujian Tahanan Stator ... 30
BAB III MOTOR INDUKSI SEBAGAI GENERATOR 3.1 Umum ... 32
3.2 Syarat – Syarat Motor Induksi Sebagai Generator ... 33
3.3 Slip ... 34
3.4 Frekuensi Rotor Proses Pembangkitan Tegangan ... 35
3.5 Prinsip Kerja Generator Induksi Penguatan Sendiri ... 36
3.6 Proses Pembangkitan Tegangan dan Rangkaian Ekivalen ... 38
3.7 Kapasitor Eksitasi ... 40
3.8 Pemasangan Kapasitor ... 42
3.8.1 Kapasitor Hubungan Delta ( ∆ ) ... 42
3.8.2 Kapasitor Hubungan Wye ( Y ) ... 43
3.9 Pengaruh Pembebanan Terhadap Arus Eksitasi... 44
3.10 Pembebanan Dengan Faktor Kerja Satu ... 44
3.11 Proses Pengendalian Tegangan ... 46
3.12 Aliran Daya Nyata MISG ... 47
3.14 MISG Penguatan Sendiri Keadaan Berbeban ... 49
3.15 Persamaan Tegangan, Arus dan Daya Pada Generator Induksi Penguatan Sendiri Hubungan Short-Shunt ... .50
BAB IV ANALISA PENGARUH BESAR NILAI KAPASITOR EKSITASI TERHADAP KARAKTERISTIK BEBAN NOL DAN BERBEBAN PADA MOTOR INDUKSI SEBAGAI GENERATOR (MISG) 4.1 Umum ... 51
4.2 Peralatan Yang Digunakan ... 52
4.3 Penentuan Besar Nilai Kapasitor ... 53
4.4 Pengujian Pengaruh Besar Nilai Kapasitor Eksitasi Terhadap Karakteristik Beban Nol dan Berbeban Pada MISG ... 55
4.4.1 Pengujian Pengukuran Tahanan Stator ... 55
4.4.1.1 Rangkaian Pengujian ... 56
4.4.1.2 Prosedur Pengujian ... 56
4.4.1.3 Data Hasil Pengujian ... 57
4.4.1.4 Analisa Data Pengujian ... 57
4.4.2 Pengujian Motor Induksi Sebagai Generator ... 59
4.4.2.1 Pengujian Beban Nol ... 59
4.4.2.1.1 Rangkaian Pengujian ... 59
4.4.2.1.2 Prosedur Pengujian ... 59
4.4.2.2 Pengujian Berbeban dan Tanpa Beban ... 61
4.4.2.2.1 Rangkaian Pengujian ... 61
4.4.2.2.2 Prosedur Pengujian ... 61
4.4.2.2.3 Data Hasil Pengujian ... 63
4.4.3 Analisa Data Pengaruh Karakteristik Beban Nol dan Berbeban Terhadap Regulasi Tegangan dan Efisiensi Pada MISG ... 64
4.4.3.1 Regulasi Tegangan ... 64
4.4.3.2 Efisiensi ... 65
4.4.4 Tabel analisa Data Percobaan ... 68
4.4.4 Kurva Analisa Percobaan ... 69
BAB V KESIMPULAN DAN SARAN 5.1 Kesimpulan ... 73
5.2 Saran ... 74
DAFTAR PUSTAKA
DAFTAR GAMBAR
2.1 Penampang Rotor dan Stator Motor Induksi ... 8
2.2(a) Lempengan Inti ... 9
2.2(b) Tumpukan Inti Dengan Kertas Isolasi Pada Beberapa Alurnya ... 9
2.2(c) Tumpukan Inti dan Kumparan Dalam Cangkang Stator ... 9
2.3(a) Tipikal Rotor Sangkar ... 10
2.3(b) Bagian – Bagian Rotor Sangkar ... 10
2.4(a) Rotor Belitan ... 11
2.4(b) Motor Induksi Rotor Belitan ... 11
2.5(a) Diagram Phasor Fluksi Tiga Phasa ... 12
2.5(b) Arus Tiga Phasa Setimbang ... 12
2.6 Medan Putar Pada Motor Induksi Tiga Phasa ... 12
2.7 Arah Fluks Yang Ditimbulkan Oleh Arus Yang Mengalir Dalam Suatu Lingkar ... 13
2.8 Diagram Vektor Untuk Fluks Total Pada Keadaan t1, t2, t3, t4 ... 14
2.9 Rangkaian Ekivalen Stator Motor Induksi ... 16
2.10 Rangkaian Ekivalen Pada Rotor Motor Induksi ... 20
2.11 Rangkaian Ekivalen Motor Induksi Tiga Phasa ... 20
2.12 Rangkaian Ekivalen Dilihat Dari Sisi Stator Motor Induksi ... 21
2.13 Rangkaian Ekivalen Dilihat Dari Sisi Stator Motor Induksi ... 21
2.14 Rangkaian Ekivalen Lain Dari Motor Induksi ... 22
2.16 Efisiensi Pada Motor Induksi ... 26
2.17 Karakteristik Torsi – Kecepatan Motor Induksi Pada Berbagai Disain ... 27
2.18 Rangkaian Pengujian Tanpa Beban Motor Induksi ... 29
2.19 Rangkaian Pengujian Tahanan Stator Arus Searah Motor Induksi ... 30
3.1 Prinsip Kerja Generator Induksi Pengutan Sendiri ... 36
3.2 Karakteristik Torsi-Kecepatan Mesin Induksi ... 37
3.3 Rangkaian Proses Pembangkitan Tegangan ... 38
3.4 Rangkaian Ekivalen Perfasa Generator Induksi ... 39
3.5 Proses Pembangkitan Tegangan ... 40
3.6 Kapasitor Terhubung Delta ... 42
3.7 Kapasitor Terhubung Bintang ... 43
3.8 Tegangan Fungsi Arus Eksitasi Dengan Faktor Kerja Satu ... 45
3.9 Kurva Magnetisasi dan Proses Pengendalian Tegangan ... 46
3.10 Diagram Aliran Daya Nyata ... 48
3.11 Rangkaian Generator Induksi Penguatan Sendiri Hubungan Short-Shunt ... 49
3.12 Rangkaian ekivalen per fasa generator induksi keadaan berbeban...50
4.1 Rangkaian Percobaan Dengan Suplai DC ... 56
4.3 Rangkaian Percobaan Berbeban Generator Induksi Penguatan
Sendiri ... 61
4.4 Kurva Percobaan Karakteristik Beban Nol ... 69
4.5 Kurva Percobaan Karakteristik Berbeban ... 70
4.6 Kurva Pengaruh Karakteristik Beban Nol dan Berbeban
Terhadap Regulasi Tegangan Pada Motor Induksi Sebagai
Generator ... 71
4.7 Kurva Pengaruh Karakteristik Beban Nol dan Berbeban
DAFTAR TABEL
4.1 Data hasil pengujian tahanan stator DC ... 57
4.2 Data hasil pengujian beban nol MISG ... 60
4.3 Data hasil pengujian berbeban MISG ... 63
4.4 Data Hasil analisa data pengaruh karakteristik beban nol dan
ABSTRAK
Motor induksi merupakan salah satu penggerak yang paling sering
digunakan dalam aplikasi industri. Disamping fungsinya sebagai penggerak,
motor induksi juga dapat dijadikan sebagai generator atau sering juga disebut
dengan Motor Induksi Sebagai Generator (MISG). Secara umum konstruksi motor
induksi adalah sama dengan konstruksi generator induksi, hanya saja dalam
pengoperasiannya generator induksi kecepatan putaran rotor harus di atas
kecepatan medan putar stator (ns<nr), yang berarti slip bernilai negatif. Tidak
hanya itu saja, motor induksi tersebut juga memerlukan kapasitor untuk
menyediakan daya reaktif.
MISG memiliki kekurangan dalam hal efisiensi dan regulasi tegangan.
Oleh karena itu pada penelitian kali ini akan dianalisis karakteristik motor induksi
tiga fasa yang dioperasikan sebagai generator. MISG dioperasikan dalam keadaan
beban nol dan keadaan berbeban dengan berbagai nilai kapasitor eksitasi yang
telah ditentukan untuk mendapatkan besaran – besaran seperti parameter mesin ,
putaran, frekuensi, tegangan, arus, faktor daya, dan daya serta pengaruh parameter
mesin terhadap regulasi dan efisiensi MISG. Pengujian ini dapat dilakukan pada
Laboratorium Pusat Pengembangan dan Pemberdayaan Pendidik dan Tenaga
BAB I
PENDAHULUAN
1.1 LATAR BELAKANG
Mesin induksi dapat dioperasikan sebagai motor maupun sebagai
generator. Namun, sedikit sekali masalah generator induksi ditulis sebagai subjek.
Alasannya adalah karena generator induksi tidak mampu mengendalikan tegangan
dan frekuensi pada kondisi berbeban dan kecepatan perputaran yang berubah.
Sehingga dari salah satu penyebabnya tersebut, generator sinkron selalu
digunakan dalam unit–unit pembangkit tenaga listrik.
Namun, akhir–akhir ini karena cadangan sumber energi yang tidak
terbarukan seperti minyak, gas bumi, batubara dan lain–lain dirasakan semakin
menipis,maka pengembangan generator induksi penguatan sendiri yang
digerakkan oleh energi angin, pembangkit mikrohidro, biogas dan lain–lain mulai
menjadi semakin mendapat perhatian yang nyata. Selain itu, keuntungan lain dari
mesin ini adalah kontruksinya yang kokoh, biaya pemeliharaan yang rendah dan
tidak membutuhkan penguatan DC.
Eksitasi generator induksi penguatan sendiri diperoleh dari kapasitor yang
dihubungkan dengan terminal stator generator. Kapasitor ini berfungsi sebagai
pembangkit daya reaktif untuk menghasilkan fluksi magnetisasi di celah udara.
Jadi tanpa adanya daya reaktif untuk kebutuhan arus eksitasi, kerja mesin induksi
Sebagai generator, karakteristik motor induksi dapat berubah–ubah
dikarenakan penambahan beban. Putaran, frekuensi, tegangan, arus, faktor daya
dan daya pada generator induksi dapat berubah–ubah dikarenakan pembebanan.
Karakteristik suatu generator induksi sangat mempengaruhi kinerja kerja
dari suatu generator itu sendiri. Untuk itu dalam tugas akhir ini , penulis akan
membahas tentang analisa pengaruh besar kapasitor eksitasi terhadap karakteristik
beban nol dan berbeban pada motor induksi sebagai generator ( MISG ) penguatan
sendiri.
1.2 Tujuan dan Manfaat Penulisan
Tugas Akhir ini bertujuan untuk mengetahui pengaruh pembebanan
terhadap regulasi tegangan dan efisiensi pada motor induksi sebagai generator.
Adapun manfaat dari penelitian ini adalah:
1. Menambah wawasan mengenai generator induksi penguatan sendiri.
2. Mengetahui besar nilai kapasitor yang akan disuplai pada generator
induksi untuk membangkitkan arus eksitasi yang diperlukan.
3. Mengetahui cara memperoleh nilai kapasitor eksitasi untuk
mendapatkan karakteristik yang lebih baik pada generator induksi.
4. Menambah aplikasi-aplikasi pada laboratorium konversi energi listrik
.
1.3 Batasan Masalah
Untuk menjaga agar pembahasan materi dalam Tugas Akhir ini lebih
1. Motor induksi yang penulis ambil sebagai aplikasi adalah Motor
Induksi Tiga Phasa Rotor Sangkar Tupai pada Laboratorium Pusat
Pengembangan dan Pemberdayaan Pendidik dan Tenaga Kependidikan
(P4TK)
2. Analisa dilakukan dalam kondisi steady state.
3. Membahas tentang analisa pengaruh besar kapasitor eksitasi terhadap
karakteristik beban nol dan karakteristik berbeban pada motor induksi
sebagai generator ( MISG ) penguatan sendiri.
4. Hanya menganalisa hubungan short shunt untuk generator induksi
penguatan sendiri dengan berbagai nilai kapasitor yang telah di
tentukan..
5. Tidak membahas tentang pengaturan.
6. Tidak membahas gangguan yang terjadi pada generator induksi.
7. Data yang diambil adalah tegangan terminal generator, arus kapasitor,
arus beban, putaran, dan daya, sesuai dengan perubahan beban..
8. Semua parameter mesin diasumsikan tetap.
9. Rugi-rugi inti, rugi gesek+angin, dan rugi-rugi di rotor diabaikan,
hanya rugi-rugi tembaga stator yang diperhitungkan.
10.Kapasitor eksitasi yang digunakan adalah hubungan Delta ( ∆ ).
11.Kondisi beban yang menjadi objek penelitian adalah beban yang
12.Analisa data berdasarkan peralatan yang tersedia di Pusat
Pengembangan dan Pemberdayaan Pendidik dan Tenaga Kependidikan
(P4TK)
1.4 Metode Penulisan
Untuk dapat menyelesaikan tugas akhir ini maka penulis menerapkan
beberapa metode studi diantaranya:
1. Studi literatur yaitu dengan membaca teori-teori yang berkaitan dengan
topik tugas akhir ini, dari buku-buku referensi baik yang dimiliki oleh
penulis atau di perpustakaan dan juga dari artikel-artikel, jurnal,
internet dan lain-lain.
2. Studi lapangan yaitu dengan melaksanakan percobaan di Laboratorium
Mesin Listrik Pusat Pengembangan dan Pemberdayaan Pendidik dan
Tenaga Kependidikan (P4TK)
3. Studi bimbingan yaitu dengan melakukan diskusi tentang topik tugas
akhir ini dengan dosen pembimbing yang telah ditunjuk oleh pihak
departemen Teknik Elektro USU, kepala dan asisten Laboratorium
Pusat Pengembangan dan Pemberdayaan Pendidik dan Tenaga
1.5 Sistematika Penulisan
Tugas akhir ini disusun berdasarkan sistematika penulisan sebagai berikut:
BAB I. PENDAHULUAN
Bab ini merupakan pendahuluan yang berisi tentang latar
belakang masalah, tujuan dan manfaat penulisan, batasan
masalah, metode penulisan, dan sistematika penulisan.
BAB II. MOTOR INDUKSI TIGA PHASA
Bab ini membahas mengenai motor induksi tiga phasa secara
umum, konstruksi motor induksi tiga phasa, prinsip kerja motor
induksi tiga phasa, medan putar, rangkaian ekivalen motor
induksi, aliran daya pada motor induksi, torsi motor induksi
tiga phasa, efisiensi motor induksi tiga phasa, disain motor
induksi, dan penentuan parameter motor induksi.
BAB III. MOTOR INDUKSI SEBAGAI GENERATOR ( MISG )
Bab ini membahas mengenai motor induksi sebagai generator
secara umum, syarat–syarat motor induksi sebagai generator,
keuntungan dan kelemahan motor induksi sebagai generator.
Bab ini juga membahas mengenai generator induksi penguatan
sendiri secara umum, prinsip kerja generator induksi
penguatan sendiri, proses pembangkitan tegangan dan
rangkaian ekivalen, aliran daya nyata generator induksi
penguatan sendiri, pengaruh pembebanan terhadap arus
induksi penguatan sendiri hubungan short shunt, persamaan
tegangan, arus dan daya pada generator induksi penguatan
sendiri hubungan short shunt.
BAB IV. PENGUJIAN PEMBEBANAN TERHADAP
KARAKTERISTIK GENERATOR INDUKSI
Bab ini membahas tentang pengujian pengaruh pembebanan
terhadap karakteristik beban nol dan berbeban. Pengambilan
data dilakukan dengan melakukan percobaan di laboratorium.
Hasil yang diinginkan adalah parameter generator induksi
penguatan sendiri untuk mendapatkan regulasi tegangan dan
efisiensi generator induksi tersebut.
BAB V. KESIMPULAN DAN SARAN
Bab ini merupakan bagian penutup berupa kesimpulan dan
saran yang berkaitan dengan pembahasan mengenai pengaruh
pembebanan terhadap regulasi tegangan dan efisiensi generator
induksi penguatan sendiri dengan kompensasi tegangan
BAB II
MOTOR INDUKSI TIGA FASA
2.1. Umum
Motor induksi merupakan salah satu jenis motor arus bolak–balik (AC)
yang paling luas digunakan. Hampir 70% dari konsumsi energi listrik pada
industri menggunakan motor induksi. Contoh pengaplikasian motor induksi yakni
kipas angin , kompresor, pompa , konveyor, transportasi dan peralatan kantor.
Pada motor sinkron gulungan rotor dieksitasi oleh arus DC sedangkan pada motor
induksi , gulungan stator dieksitasi oleh arus AC yang kemudian menginduksi
gulungan rotor sehingga mengalir arus AC didalamnya. Hal ini sama seperti
gulungan sekunder pada transformator yang terinduksi tegangan oleh gulungan
primer dan oleh karena itu motor induksi dapat dianggap sebagai transformator
putar (dengan syarat gulungan primer adalah bagian yang diam dan gulungan
sekunder adalah bagian yang berputar).
Motor ini memiliki konstruksi yang kuat, sederhana, handal, serta berbiaya
murah. Di samping itu motor ini juga memiliki effisiensi yang tinggi saat
berbeban penuh dan tidak membutuhkan perawatan yang banyak. Akan tetapi
jika dibandingkan dengan motor DC, motor induksi masih memiliki kelemahan
dalam hal pengaturan kecepatan. Dimana pada motor induksi pengaturan
kecepatan sangat sukar untuk dilakukan, sementara pada motor DC hal yang sama
2.2 Konstruksi Motor Induksi Tiga Fasa
Secara umum motor induksi terdiri dari rotor dan stator. Rotor merupakan
bagian yang bergerak, sedangkan stator bagian yang diam. Diantara stator dengan
rotor ada celah udara yang jaraknya sangat kecil. Konstruksi motor induksi dapat
dilihat pada Gambar 2.1.
Rotor
Stator
Gambar 2.1. Penampang rotor dan stator motor induksi
Komponen stator adalah bagian terluar dari motor yang merupakan bagian
yang diam dan mengalirkan arus fasa. Stator terdiri atas tumpukan laminasi inti
yang memiliki alur yang menjadi tempat kumparan dililitkan yang berbentuk
silindris. Alur pada tumpukan laminasi inti diisolasi dengan kertas (Gambar
2.2.(b)). Tiap elemen laminasi inti dibentuk dari lembaran besi (Gambar 2.2 (a)).
Tiap lembaran besi tersebut memiliki beberapa alur dan beberapa lubang pengikat
untuk menyatukan inti. Tiap kumparan tersebar dalam alur yang disebut belitan
fasa dimana untuk motor tiga fasa, belitan tersebut terpisah secara listrik sebesar
120o. Kawat kumparan yang digunakan terbuat dari tembaga yang dilapis dengan
isolasi tipis. Kemudian tumpukan inti dan belitan stator diletakkan dalam
lempengan inti yang telah disatukan, belitan stator yang telah dilekatkan pada
cangkang luar untuk motor induksi tiga fasa.
(c)
Gambar 2.2. Menggambarkan komponen stator motor induksi tiga fasa,
(a) Lempengan inti,
(b) Tumpukan inti dengan kertas isolasi pada beberapa alurnya.
(c) Tumpukan inti dan kumparan dalam cangkang stator.
Rotor motor induksi tiga fasa dapat dibedakan menjadi dua jenis yaitu
rotor sangkar (squirrel cage rotor) dan rotor belitan (wound rotor). Rotor sangkar
terdiri dari susunan batang konduktor yang dibentangkan ke dalam slot–slot yang
terdapat pada permukaan rotor dan tiap–tiap ujungnya dihubung singkat dengan
menggunakan shorting rings. Rotor jenis ini adalah yang paling umum untuk
(a) (b)
motor induksi. Rotor sangkar memiliki berbagai ukuran mulai lebih kecil dari 1
kW sampai lebih besar dari 30 MW. Pada rotor sangkar seperti Gambar 2.3
kecepatan putaran rotor biasanya 1% atau lebih lambat kecepatan sinkron dari
medan putar di celah udara yang ditimbulkan oleh gulungan stator.
(a) (b)
Gambar2.3. Rotor sangkar, (a) Tipikal rotor sangkar
(b) Bagian–bagian rotor sangkar
Sementara itu pada rotor belitan seperti Gambar 2.4, rotornya dibentuk
dari satu set belitan tiga fasa yang merupakan bayangan dari belitan statornya.
Biasanya belitan tiga fasa dari rotor ini terhubung Y dan kemudian tiap-tiap ujung
dari tiga kawat rotor tersebut diikatkan pada slip ring yang berada pada poros
rotor. Pada motor induksi rotor belitan, rangkaian rotornya dirancang untuk dapat
disisipkan dengan tahanan eksternal, yang mana hal ini akan memberikan
(a) (b)
Gambar 2.4. (a) Rotor belitan
(b) Motor induksi rotor belitan
2.3 Medan Putar
Perputaran motor pada mesin arus bolak–balik ditimbulkan oleh adanya
medan putar (fluks yang berputar) yang dihasilkan dalam kumparan statornya.
Medan putar ini terjadi apabila kumparan stator dihubungkan dalam fasa banyak,
umumnya fasa 3. Hubungan dapat berupa hubungan bintang atau delta.
Misalkan kumparan a–a’; b–b’; c–c’ dihubungkan 3 fasa, dengan beda
fasa masing – masing 1200 (Gambar 2.5a) dan dialiri arus sinusoid. Distribusi arus
ia, ib, ic sebagai fungsi waktu adalah seperti Gambar 2.5b. Pada keadaan t1, t2, t3,
dan t4, fluks resultan yang ditimbulkan oleh kumparan tersebut masing – masing
adalah seperti Gambar 2.6c, d, e, dan f.
Pada t1 fluks resultan mempunyai arah sama dengan arah fluks yang
dihasilkan oleh kumparan a–a’; sedangkan pada t2, fluks resultannya mempunyai
arah sama dengan arah fluks yang dihasilkan oleh kumparan c–c’; dan untuk t3
b–b’. Untuk t4, fluks resultannya berlawanan arah dengan fluks resultan yang
dihasilkan pada saat t1 keterangan ini akan lebih jelas pada analisa vektor.
Gambar 2.5. (a) Diagram phasor fluksi tiga fasa
(b) Arus tiga fasa setimbang
(b)Arus tiga fasa setimbang
Gambar 2.6. Medan putar pada motor induksi tiga fasa
Dari gambar c, d ,e, dan f tersebut terlihat fluks resultan ini akan berputar
satu kali. Oleh karena itu untuk mesin dengan jumlah kutub lebih dari dua,
kecepatan sinkron dapat diturunkan sebagai berikut:
ns =
p f . 120
………..(2.1)
ns = kecepatan sinkron (rpm)
2.3.1 Analisis Secara Vektor
Analisis secara vektor didapatkan atas dasar:
1. Arah fluks yang ditimbulkan oleh arus yang mengalir dalam suatu
lingkar sesuai dengan perputaran sekrup (Gambar 2.7).
Gambar 2.7. Arah fluks yang ditimbulkan oleh arus yang mengalir
dalam suatu lingkar
2. Kebesaran fluks yang ditimbulkan ini sebanding dengan arus yang
mengalir.
Notasi yang dipakai untuk menyatakan positif atau negatifnya arus yang
mengalir pada kumparan a–a’, b–b’, dan c–c’ yaitu: harga positif, apabila tanda silang (x) terletak pada pangkal konduktor tersebut (titik a, b, c), sedangkan negatif apabila tanda titik ( . ) terletak pada pangkal konduktor tersebut (Gambar
2.8). Maka diagram vektor untuk fluks total pada keadaan t1, t2, t3, t4, dapat dilihat
Gambar 2.8. Diagram vektor untuk fluks total pada keadaan t1, t2, t3, t4
Dari semua diagram vektor di atas dapat pula dilihat bahwa fluks resultan
berjalan (berputar).
2.4 Prinsip Kerja Motor Induksi Tiga Fasa
Pada keadaan beban nol ketiga fasa stator yang dihubungkan dengan
sumber tegangan tiga fasa yang setimbang menghasilkan arus pada tiap belitan
fasa. Arus pada tiap fasa menghasilkan fluksi bolak-balik yang berubah-ubah.
Amplitudo fluksi yang dihasilkan berubah secara sinusoidal dan arahnya tegak
lurus terhadap belitan fasa. Akibat fluksi yang berputar timbul ggl pada stator
motor yang besarnya adalah
e1 =
dt d
N Φ
− 1 (Volt)...(2.2)
Penjumlahan ketiga fluksi bolak-balik tersebut disebut medan putar yang
berputar dengan kecepatan sinkron ns, besarnya nilai ns ditentukan oleh jumlah
kutub p dan frekuensi stator f yang dirumuskan dengan
p f
ns =120× (rpm)...(2.4)
Fluksi yang berputar tersebut akan memotong batang konduktor pada
rotor. Akibatnya pada kumparan rotor timbul tegangan induksi (ggl) sebesar E2
yang besarnya
m 2
2 444fN Φ
E = , (Volt)...(2.5)
dimana:
E2 = Tegangan induksi pada rotor saat rotor dalam keadaan diam (Volt)
N2 = Jumlah lilitan kumparan rotor
Фm = Fluksi maksimum(Wb)
Karena kumparan rotor merupakan rangkaian tertutup, maka ggl tersebut
akan menghasilkan arus I2. Adanya arus I2 di dalam medan magnet akan
menimbulkan gaya F pada rotor. Bila kopel mula yang dihasilkan oleh gaya F
cukup besar untuk memikul kopel beban, rotor akan berputar searah medan putar
stator. Perputaran rotor akan semakin meningkat hingga mendekati kecepatan
sinkron. Perbedaan kecepatan medan stator (ns) dan kecepatan rotor (nr) disebut
slip (s) dan dinyatakan dengan
100% s
r s − ×
=
n n n
Pada saat rotor dalam keadaan berputar, besarnya tegangan yang terinduksi
pada kumparan rotor akan bervariasi tergantung besarnya slip. Tegangan induksi
ini dinyatakan dengan E2s yang besarnya
E2s =4,44sfN2Φm(Volt)...(2.7)
dimana:
E2s = tegangan induksi pada rotor dalam keadaan berputar (Volt)
f2 = s.f = frekuensi rotor (frekuensi tegangan induksi pada rotor dalam
keadaan berputar)
Bila ns = nr, tegangan tidak akan terinduksi dan arus tidak akan mengalir
pada kumparan rotor, karenanya tidak dihasilkan kopel. Kopel ditimbulkan jika
nr < ns
2.5 Rangkaian Ekivalen Motor Induksi
2.5.1 Rangkaian Ekivalen Stator
Untuk mempermudah analisis motor induksi, digunakan metoda rangkaian
ekivalen per–fasa. Motor induksi dapat dianggap sebagai transformator dengan
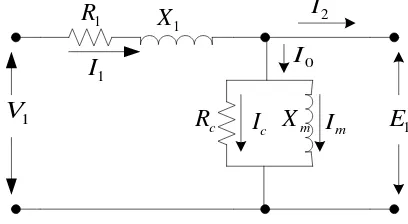
rangkaian sekunder berputar. Rangkaian ekivalen statornya dapat ditunjukkan
pada Gambar 2.9.
1
V
1
R
1
X
1
I
c
R Xm
0
I
c
I Im 2
I
1
E
[image:31.595.227.431.572.684.2]dimana:
V1 = tegangan terminal stator (Volt)
E1 = ggl lawan yang dihasilkan oleh fluks celah udara resultan (Volt)
I1 = arus stator (Ampere)
R1 = tahanan efektif stator (Ohm)
X1 = reaktansi bocor stator (Ohm)
Arah positif dapat dilihat pada rangkaian Gambar 2.9.
Arus stator terbagi atas 2 komponen, yaitu komponen arus beban dan komponen
arus penguat I0. Komponen arus penguat I0 merupakan arus stator tambahan yang
diperlukan untuk menghasilkan fluksi celah udara resultan, dan merupakan fungsi
ggm E1.
Komponen arus penguat I0 terbagi atas komponen rugi – rugi inti IC yang
sefasa dengan E1 dan komponen magnetisasi IM yang tertinggal 900 dari E1.
Hubungan antara tegangan yang diinduksikan pada rotor sebenarnya
(Erotor) dan tegangan yang diinduksikan pada rotor ekivalen (E2S) adalah:
rotor
S E
E2 =
2 1 N N
= a
atau
E2S = a Erotor ……….……..………... (2.8)
dimana a adalah jumlah lilitan efektif tiap fasa pada lilitan stator yang banyaknya
a kali jumlah lilitan rotor.
Bila rotor–rotor diganti secara magnetik, lilitan–ampere masing–masing
harus sama, dan hubungan antara arus rotor sebenarnya Irotor dan arus I2S pada
I2S =
a Irotor
……….……... (2.9)
sehingga hubungan antara impedansi bocor frekuensi slip Z2S dari rotor ekivalen
dan impedansi bocor frekuensi slip Zrotor dari rotor sebenarnya adalah:
Z2S = =
S S I E 2 2 = rotor rotor I E a2 rotor Z
a2 ………..….…(2.10)
Nilai tegangan, arus dan impedansi tersebut diatas didefinisikan sebagai nilai yang
referensinya ke stator.
Selanjutnya Persamaan (2.10) dapat dituliskan:
= S S I E 2 2 S
Z2 = R2+ jsX2 ………..……....(2.11)
dimana:
Z2S = impedansi bocor rotor frekuensi slip tiap fasa dengan referensi ke
stator (Ohm).
R2 = tahanan efektif referensi (Ohm)
sX2 = reaktansi bocor referensi pada frekuensi slip X2 didefinisikan
sebagai harga reaktansi bocor rotor dengan referensi frekuensi
stator (Ohm).
2.5.2 Rangkaian Ekivalen Rotor
Reaktansi yang didapat pada Persamaan (2.11) dinyatakan dalam cara
yang demikian karena sebanding dengan frekuensi rotor dan slip. Jadi X2 didefinisikan sebagai harga yang akan dimiliki oleh reaktansi bocor pada rotor
Pada stator ada gelombang fluks yang berputar pada kecepatan sinkron.
Gelombang fluks ini akan mengimbaskan tegangan pada rotor dengan frekuensi
slip sebesar E2s dan ggl lawan stator E1. Bila bukan karena efek kecepatan,
tegangan rotor akan sama dengan tegangan stator, karena lilitan rotor identik
dengan lilitan stator. Karena kecepatan relatif gelombang fluks terhadap rotor
adalah s kali kecepatan terhadap stator, hubungan antara ggl efektif pada stator
dan rotor adalah:
E2s = sE1……….…...…….(2.12)
Gelombang fluks magnetik pada rotor dilawan oleh fluks magnetik yang
dihasilkan komponen beban I2 dari arus stator, dan karenanya, untuk harga
efektif
s
I2 = I2...(2.13)
Dengan membagi Persamaan (2.12) dengan Persamaan (2.13) didapatkan:
= S S I E 2 2 2 1 I sE ……….………..(2.14)
Didapat hubungan antara Persamaan (2.13) dengan Persamaan (2.14), yaitu
= S S I E 2 2 2 1 I sE
= R2+ jsX2……...……...(2.15)
Dengan membagi Persamaan (2.15) dengan s, maka didapat
2 1 I E = s R2
+ jX2……….………...……….…(2.16)
Dari Persamaan (2.11) , (2.12) dan (2.16) maka dapat digambarkan rangkaian
ekivalen pada rotor seperti Gambar 2.10.
s
E2 E1
2 R 2 sX 2 X s R2 2 R ) 1 1 ( 2 − s R 2
I I2
2 X 2 I 1 E
Gambar2.10. Rangkaian ekivalen pada rotor motor induksi.
s R2 = s R2
+ R2- R2
s R2
= R2+ 2(1−1) s
R ……….………...(2.17)
Dari penjelasan mengenai rangkaian ekivalen pada stator dan rotor di atas,
maka dapat dibuat rangkaian ekivalen motor induksi tiga fasa pada masing –
masing fasanya. Perhatikan Gambar 2.11.
1
V
1 R 1 X 1 I cR Xm
Φ I
c
I
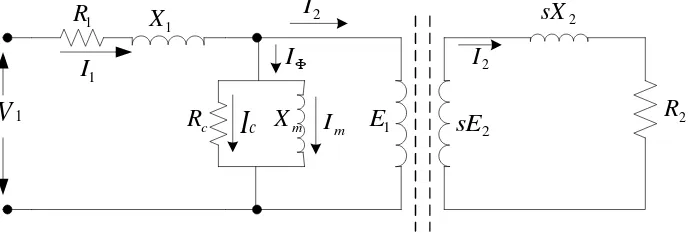
Im2 I 1 E 2 sX 2 I 2 R 2 sE
[image:35.595.148.493.482.600.2]Untuk mempernudah perhitungan maka rangkaian ekivalen pada Gambar
2.11 dapat dilihat dari sisi stator, rangkaian ekivalen motor induksi tiga fasa akan
dapat digambarkan seperti Gambar 2.12, dan Gambar 2.13.
1
V
1
R X1
c R m X ' 2 X 1 E 1
I I0
c I m I 2 ' I s R2'
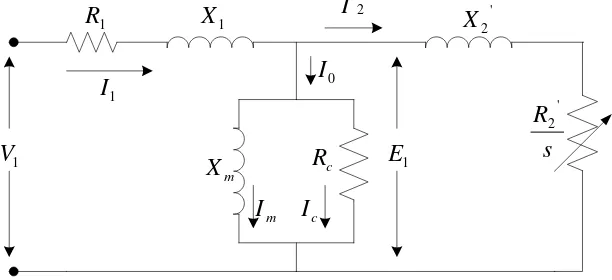
Gambar2.12. Rangkaian ekivalen dilihat dari sisi stator motor induksi
1
V
1
R X1
c R m X 2 ' R ' 2 X ) 1 1 ( ' 2 − s R 1 E 1
I I0
[image:36.595.181.487.176.316.2]c I m I 2 ' I
Gambar 2.13. Rangkaian ekivalen dilihat dari sisi stator motor induksi
Dimana:
2 '
X = a2X2
2 '
Dalam teori transformator-statika, analisis rangkaian ekivalen sering
disederhanakan dengan mengabaikan seluruh cabang penalaran atau melakukan
pendekatan dengan memindahkan langsung ke terminal primer. Pendekatan
demikian tidak dibenarkan dalam motor induksi yang bekerja dalam keadaan
normal, karena adanya celah udara yang menjadikan perlunya suatu arus
peneralan yang sangat besar (30% sampai 40% dari arus beban penuh) dan karena
reaktansi bocor juga perlu lebih tinggi. Untuk itu dalam rangkaian ekivalen
c
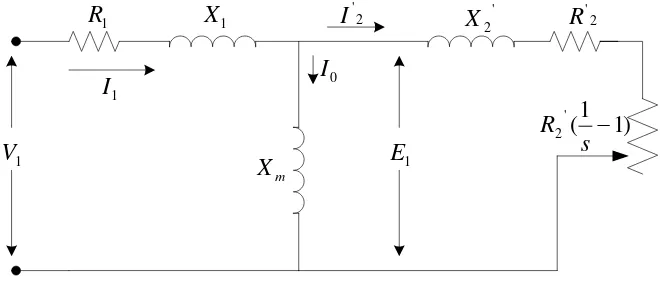
R dapat dihilangkan (diabaikan). Rangkaian ekivalen menjadi Gambar 2.14.
1
V
1
R X1
m X 2 ' R ' 2 X ) 1 1 ( ' 2 − s R 1 E 1
I I0
2 '
[image:37.595.148.478.313.454.2]I
Gambar 2.14. Rangkaian ekivalen lain dari motor induksi
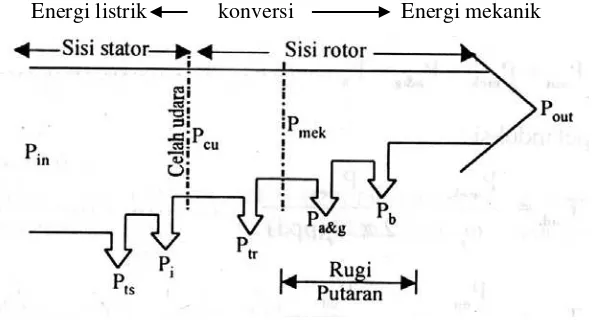
2.6 Aliran Daya Motor Induksi
Pada motor induksi, tidak ada sumber listrik yang langsung terhubung ke
rotor, sehingga daya yang melewati celah udara sama dengan daya yang
diinputkan ke rotor. Daya total yang dimasukkan pada kumparan stator (Pin)
dirumuskan dengan
θ cos 3 1 1 in V I
dimana:
V1 = tegangan sumber (Volt)
I1 = arus masukan(Ampere)
θ = perbedaan sudut fasa antara arus masukan dengan tegangan
sumber.
Daya listrik disuplai ke stator motor induksi diubah menjadi daya mekanik
pada poros motor. Berbagai rugi – rugi yang timbul selama proses konversi energi
listrik antara lain:
1. rugi – rugi tetap (fixed losses), terdiri dari :
rugi – rugi inti stator (Pi)
Pi =
C R
E12 . 3
(Watt) ………..…..………..………..(2.19)
rugi – rugi gesek dan angin
2. rugi – rugi variabel, terdiri dari :
rugi – rugi tembaga stator (Pts)
Pts = 3. I12. R1 (Watt) ………..…………..…….….(2.20)
rugi – rugi tembaga rotor (Ptr)
Ptr = 3. I22. R2 (Watt) ……..………...(2.21)
Daya pada celah udara (Pcu) dapat dirumuskan dengan :
Pcu = Pin – Pts – Pi (Watt) …..………...(2.22)
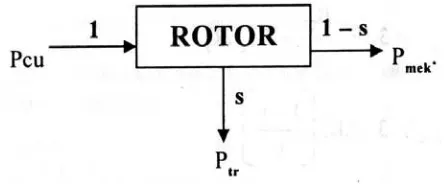
Jika dilihat pada rangkaian rotor, satu–satunya elemen pada rangkaian
ekivalen yang mengkonsumsi daya pada celah udara adalah resistor R2 / s. Oleh
Pcu = 3. I22.
S R2
(Watt) …..………..………….…..(2.23)
Apabila rugi–rugi tembaga dan rugi–rugi inti dikurangi dengan daya input
motor, maka akan diperoleh besarnya daya listrik yang diubah menjadi daya
mekanik.
Besarnya daya mekanik yang dibangkitkan motor adalah:
Pmek = Pcu – Ptr (Watt) ………..………(2.24)
Pmek = 3. I22.
S
R2
- 3. I22. R2
Pmek = 3. I22. R2. (
s s − 1
)
Pmek = Ptr x (
s s − 1
) (Watt) ………..………...(2.25)
Dari Persamaan (2.21) dan (2.23) dapat dinyatakan hubungan rugi – rugi
tembaga dengan daya pada celah udara:
Ptr = s. Pcu (Watt) ……..……….………..(2.26)
Karena daya mekanik yang dibangkitkan pada motor merupakan selisih
dari daya pada celah udara dikurangi dengan rugi – rugi tembaga rotor, maka daya
mekanik dapat juga ditulis dengan:
Pmek = Pcu x ( 1 – s ) (Watt) ………...……..…(2.27)
Daya output akan diperoleh apabila daya yang dikonversikan dalam
bentuk daya mekanik dikurangi dengan rugi – rugi gesek dan angin, sehingga
daya keluarannya:
Secara umum, perbandingan komponen daya pada motor induksi dapat
dijabarkan dalam bentuk slip yaitu:
[image:40.595.161.459.212.372.2]Pcu : Ptr : Pmek = 1 : s : 1 – s.
Gambar 2.15 menunjukkan aliran daya pada motor induksi tiga fasa :
Energi listrik konversi Energi mekanik
Gambar 2.15. Diagram aliran daya motor induksi
2.7 Efisiensi Motor Induksi Tiga Fasa
Efisiensi dari suatu motor induksi didefenisikan sebagai ukuran
keefektifan motor induksi untuk mengubah energi listrik menjadi energi mekanik
yang dinyatakan sebagai perbandingan/rasio daya output (keluaran) dengan daya
input (masukan), atau dapat juga dirumuskan dengan:
Loss out out in loss in in out % 100 % 100 (%) P P P x P P P x P P + = − = =
η ×100%. …………..….(2.29)
Ploss = Pin + Pi + Ptr + Pa & g + Pb ………...(2.30)
Dari Persamaan 2.29 dapat dilihat bahwa efisiensi motor tergantung pada
besarnya rugi–rugi. Pada dasarnya metode yang digunakan untuk menentukan
efisiensi motor induksi bergantung pada dua hal apakah motor itu dapat dibebani
secara penuh atau pembebanan simulasi yang harus digunakan seperti Gambar
[image:41.595.197.420.230.322.2]2.16.
Gambar 2.16. Efisiensi pada motor induksi
dimana:
Pcu = daya yang diinputkan ke rotor (Watt)
Ptr = rugi – rugi tembaga rotor (Watt)
Pmek = daya mekanik dalam bentuk putaran (Watt)
Efisiensi dari motor induksi dapat diperoleh dengan melakukan pengujian
beban nol dan pengujian hubung singkat. Dari pengujian beban nol akan diperoleh
rugi–rugi mekanik dan rugi–rugi inti. Rugi–rugi tembaga stator tidak dapat
diabaikan sekalipun motor berbeban ringan maupun tanpa beban.
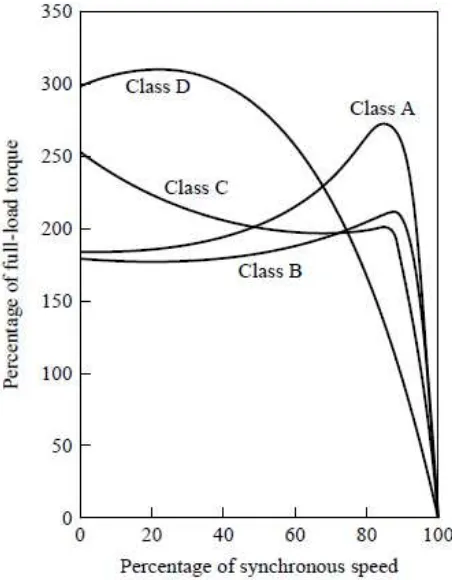
2.8 Disain Motor Induksi Tiga Fasa
Standard NEMA di Amerika Serikat mengkategorikan motor induksi ke
dalam empat kelas berdasarkan kurva torsi-kecepatan yakni disain kelas A,B,C,
Karakteristik torsi – kecepatannya dapat dilihat pada Gambar 2.17.
Gambar2.17. Karakteristik torsi-kecepatan motor induksi pada berbagai disain
1. Kelas A: disain ini memiliki torsi start normal (150 – 170%) dari nilai
ratingnya) dan arus start relatif tinggi. Torsi break down nya merupakan yang
paling tinggi dari semua disain NEMA. Motor ini mampu menangani beban
lebih dalam jumlah besar selama waktu yang singkat. Slip < = 5%
2. Kelas B: merupakan disain yang paling sering dijumpai di pasaran. Motor ini
memiliki torsi start yang normal seperti halnya disain kelas A, akan tetapi
motor ini memberikan arus start yang rendah. Torsi locked rotor cukup baik
untuk menstart berbagai beban yang dijumpai dalam aplikasi industri. Slip
[image:42.595.195.421.118.408.2]tinggi sehingga disain ini merupakan yang paling populer. Aplikasinya dapat
dijumpai pada pompa, kipas angin/ fan, dan peralatan–peralatan mesin.
3. Kelas C: memiliki torsi start lebih tinggi (200 % dari nilai ratingnya) dari dua
disain yang sebelumnya. Aplikasinya dijumpai pada beban–beban seperti
konveyor, mesin penghancur (crusher), komperessor,dll. Operasi dari motor
ini mendekati kecepatan penuh tanpa overload dalam jumlah besar. Arus
startnya rendah, slipnya < = 5 %
4. Kelas D: memiliki torsi start yang paling tinggi. Arus start dan kecepatan
beban penuhnya rendah. Memiliki nilai slip yang tinggi (5 -13 %), sehingga
motor ini cocok untuk aplikasi dengan perubahan beban dan perubahan
kecepatan secara mendadak pada motor. Contoh aplikasinya : elevator, crane,
dan ekstraktor.
2.9 Penentuan Parameter Motor Induksi
Data yang diperlukan untuk menghitung performansi dari suatu motor
induksi dapat diperoleh dari hasil pengujian tanpa beban, pengujian rotor tertahan,
dan pengukuran tahanan dc lilitan stator.
2.9.1 Pengujian Tanpa Beban
Pengujian ini untuk mengukur rugi–rugi putaran dan arus magnetisasi.
Pada keadaan tanpa beban (beban nol), beban yang dipikul hanyalah rugi–rugi
angin dan gesekan. Adapun rangkaian pengujian tanpa beban adalah seperti
P
1P
2A
A
A
V
Motor
I
RI
SI
TGambar 2.18. Rangkaian pengujian tanpa beban motor induksi
Fungsi W1, W2, dan A untuk mengukur parameter yang di percobaan beban nol.
Dari data instrumen ukur dapat ditentukan parameter–parameter (per fasa):
Zbn =
bn bn I V
≈X1 + Xm ……….………..(2.32)
Reaktansi magnetisasi (Xm) dapat dicari jika reaktansi primer X1 diketahui.
Ibn (jala – jala) =
3 T S
R I I
I + +
………..……….…...(2.33)
Slip yang terjadi umumnya sangat kecil (≤ 0,001), sehingga:
R2
s s) 1 ( −
> > R2 dan juga R2
s s) 1 ( −
> > X2'
maka I2 pada percobaan ini diabaikan.
R2
s s) 1 ( −
+ jX2 ≈ R2
s s) 1 ( −
Rugi rotor ini dianggap sebagai rugi angin dan gesekan, sedangkan rugi
tembaga stator dapat dicari sebagai:
Pts = I12 . R1……….………...(2.34) 1
W
2
di mana I1 di sini sama dengan Ibn (fasa) dan R1 dicari lewat pengujian tahanan
stator arus searah.
Dan persamaan daya:
Pin( bn ) = Pts + Prot ……….(2.35)
Prot = Pi + Pa & g + rugi lain – lain ………...…….(2.36)
di mana:
Prot = daya yang hilang akibat adanya putaran (Watt).
Pi = rugi inti (Watt).
Pa & g = rugi angin dan gesekan (Watt)
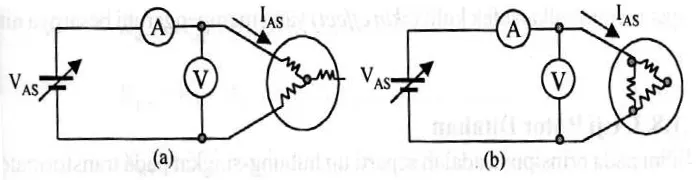
2.9.2 Pengujian Tahanan Stator
Pengujian ini digunakan untuk mengetahui nilai parameter resistansi stator
(primer) R1. Pada pengujian ini kumparan stator dialiri arus searah, sehingga
suhunya mencapai suatu nilai yang sama jika motor induksi beroperasi pada
[image:45.595.131.479.496.586.2]kondisi operasi normal (resistansi kumparan merupakan fungsi suhu).
Gambar 2.19. Rangkaian pengujian tahanan stator arus searah motor induksi
Pada percobaan ini, jika kumparan stator terhubung bintang (Gambar
2.19.a), maka arus akan mengalir melewati dua kumparan dengan resistansi
AS AS I V
= 2R1
atau
R1 =
AS AS
I V
2 ………...(2.37)
Sedangkan jika terhubung segitiga (Gambar 2.19.b), maka arus akan
mengalir melewati ketiga kumparan tersebut yang besarnya secara ekivalen
terlukis pada gambar berikut, dengan resistansi total :
1 R 1 R 1 R Sehingga: AS AS I V = 3 2 . Rt
atau
R1 =
AS AS I V 2 3 ……….………..(2.38)
Nilai R1 yang didapat hanya merupakan nilai pendekatan, karena pada
kondisi operasi normal, motor induksi diberikan pasokan tegangan arus
bolak-balik yang dapat menimbulkan efek kulit (skin effect) yang mempengaruhi
BAB III
MOTOR INDUKSI SEBAGAI GENERATOR
PENGUATAN SENDIRI
3.1 Umum
Mesin induksi dapat dioperasikan sebagai motor maupun sebagai
generator. Bila dioperasikan sebagai motor, mesin induksi harus dihubungkan
dengan sumber tegangan (jala–jala) yang akan memberikan energi mekanis pada
mesin tersebut dengan mengambil arus eksitasi dari jala – jala dan mesin bekerja
dengan slip lebih besar dari nol sampai satu (0≤s≤ 1).
Jika mesin dioperasikan sebagai generator, maka diperlukan daya mekanis
untuk memutar rotornya searah dengan arah medan putar melebihi kecepatan
sinkronnya dan sumber daya reaktif untuk memenuhi kebutuhan arus eksitasinya.
Kebutuhan daya reaktif dapat diperoleh dari jala–jala atau dari suatu kapasitor.
Tanpa adanya daya reaktif, mesin induksi yang dioperasikan sebagai generator
tidak menghasilkan tegangan. Jika generator induksi terhubung dengan jala–jala,
maka kebutuhan daya reaktif diambil dari jala–jala. Namun, bila generator induksi
tidak tehubung dengan jala–jala, maka kebutuhan daya reaktif dapat disediakan
dari suatu unit kapasitor. Kapasitor tersebut dihubungkan paralel dengan terminal
keluaran generator. Kapasitor yang terpasang harus mampu memberikan daya
reaktif yang dibutuhkan untuk menghasilkan fluksi di celah udara. Karena
generator induksi penguatan sendiri. Mesin induksi yang beroperasi sebagai
generator ini bekerja dengan slip yang lebih kecil dari nol (s < 0).
3.2 Syarat – Syarat Motor Induksi Sebagai Generator
Motor induksi tiga fasa dapat dioperasikan sebagai generator dengan cara
memutar rotor pada kecepatan di atas kecepatan medan putar (nr > ns) dan atau
mesin bekerja pada slip negatip (s < 0).
ns =
p f 120
………...(3.1)
dengan:
ns : Kecepatan medan putar, rpm
f : Frekuensi sumber daya, Hz
p : Jumlah kutub motor induksi.
Sehingga;
s = s
r s
n n n −
. 100 % , nr > ns……….……...……....(3.2)
dengan:
s : slip
ns : Kecepatan medan putar, rpm
nr : Kecepatan putar rotor, rpm
Karena Motor Induksi Sebagai Generator (MISG) ini bekerja stand alone
pemasangan kapasitor pada Motor Induksi Sebagai Generator (MISG) beroperasi
sendiri ini adalah untuk menyediakan daya reaktif.
3.3 Slip
Selisih antara kecepatan rotor dengan kecepatan sinkron disebut slip (s).
Slip dapat dinyatakan dalam putaran setiap menit, tetapi lebih umum dinyatakan
sebagai persen dari kecepatan sinkron.
Slip (s) = s
r s
n n n −
x 100 %...(3.3)
dimana:
nr = kecepatan rotor ( rpm )
ns = kecepatan sinkron ( rpm )
Apabila nr < ns, (0 < s < 1), kecepatan dibawah sinkron akan menghasilkan
kopel, rotor dijalankan dengan mempercepat rotasi medan magnet, tenaga listrik
diubah ke tenaga gerak (daerah motor).
Bila nr = ns, (s = 0), tegangan tidak akan terinduksi dan arus tidak akan
mengalir pada belitan rotor, sehingga tidak akan dihasilkan kopel.
Bila nr > ns, (s < 0), kecepatan di atas sinkron, rotor dipaksa berputar lebih
cepat daripada medan magnet. Tenaga gerak diubah ke tenaga listrik (daerah
generator).
s = 1, rotor ditahan, tidak ada transfer tenaga.
s > 1, kecepatan terbalik, rotor dipaksa bekerja melawan medan magnet
3.4 Frekuensi Rotor
Kecepatan dan jumlah kutub derajat ac menentukan frekuensi tegangan
yang dibangkitkan. Jika generator mempunyai dua kutub (utara dan selatan) dan
kumparan berputar pada kecepatan satu putaran per detik, maka frekuensi akan
berubah menjadi siklus per detik. Rumus untuk menentukan frekuensi generator
ac adalah :
f = 120
pn
……….…(3.4)
dimana:
f = Frekuensi tegangan yang diinduksikan (Hz)
p = jumlah kutub pada rotor
n = kecepatan rotor per menit (r / menit)
Besarnya tegangan yang di bangkitkan tergantung pada kecepatan pada
garis medan magnet yang dipotong atau dalam hal generator ac, besarnya
tegangan tergantung pada kuat medan dan kecepatan rotor. Karena sebagian besar
dioperasikan pada kecepatan konstan, jumlah GGL yang dibangkitkan menjadi
3.5 Prinsip Kerja Generator Induksi (MISG) Penguatan Sendiri
Gambar 3.1. Prinsip kerja generator induksi penguatan sendiri
Pada mesin induksi tidak terdapat hubungan listrik antara stator dengan
rotor, karena arus pada rotor merupakan arus induksi. Jika belitan stator diberi
tegangan tiga fasa, maka pada stator akan dihasilkan arus tiga fasa, arus ini
kemudian akan menghasilkan medan magnet yang berputar dengan kecepatan
sinkron (ns) dan kemudian akan melakukan pengisian muatan ke kapasitor (C)
yang dipasang parallel dengan stator yang tujuannya untuk mensuplai tegangan ke
stator nanti untuk mempertahankan kecepatan sinkron (ns) motor induksi pada
saat dilakukan pelepasan sumber tegangan tiga fasa pada stator.
Pada rangkaian (seperti Gambar 3.1) mesin dc sebagai prime mover yang
dikopel dengan mesin induksi diputar secara perlahan memutar rotor mesin
induksi hingga mencapai putaran sinkronnya (nr = ns). Saklar sumber tegangan
tiga fasa untuk stator dilepas, dan kapasitor yang sudah discharge akan bekerja
putaran sinkronnya mesin induksi (nr > ns), sehingga slip yang timbul antara
putaran rotor dan putaran medan magnet menghasilkan slip negatif (s < 0) dan
akan menghasilkan tegangan sehingga motor induksi akan berubah fungsi menjadi
[image:52.595.118.491.196.436.2]generator induksi.
Gambar 3.2. Karakteristik torsi – kecepatan mesin induksi
Dari kurva karakteristik (Gambar3.2) antara kecepatan dan kopel motor
induksi dapat dilihat, jika sebuah motor induksi dikendalikan agar kecepatannya
lebih besar daripada kecepatan sinkron oleh penggerak mula, maka arah kopel
yang terinduksi akan terbalik dan akan beroperasi sebagai generator. Semakin
besar kopel pada penggerak mula, maka akan memperbesar pula daya listrik yang
dihasilkan. Pada gambar karakteristik diatas generator mulai menghasilkan
tegangan pada saat putaran rotor (nr) sedikit lebih cepat dari putaran sinkron (ns)
Pada motor induksi yang dioperasikan sebagai generator tidak terdapat
pengatur tegangan seperti governor pada generator sinkron. Oleh karena itu
tegangan keluaran sangat dipengaruhi oleh beban dan nilai kapasitor.
3.6 Proses Pembangkitan Tegangan dan Rangkaian Ekivalen Generator
Induksi
Syarat utama terbangkitnya tegangan generator induksi adalah adanya
remanensi di rotor atau kapasitor eksitasi yang digunakan harus mempunyai
muatan listrik terlebih dahulu. Remanensi atau muatan kapasitor merupakan
tegangan awal yang diperlukan untuk proses pembangkitan tegangan selanjutnya.
Proses pembangkitan tegangan akan terjadi bila salah satu syarat di atas dipenuhi.
Gambar 3.3 memperlihatkan rangkaian proses pembangkitan tegangan generator
induksi.
E2 E1
C eksitasi beban
[image:53.595.192.466.475.607.2]rotor stator
Gambar 3.3 Rangkaian proses pembangkitan tegangan
Dari Gambar 3.3 dapat dibuat rangkaian ekivalen per fasa generator
Xm s R X R X I Xc Ic E1 b e b a n V 2 2 1 1 1 IL
Gambar3.4. Rangkaian ekivalen perfasa generator induksi
Dimana :
R1 = tahanan stator IL = arus beban
R2 = tahanan rotor s = slip
X1 = reaktansi stator v = tegangan keluaran (fasa-netral)
X2 = reaktansi rotor
Xm = reaktansi magnetisasi
XC = reaktansi kapasitansi
I1 = arus stator
IC = arus magnetisasi
Dengan menghubungkan kapasitor di terminal stator, akan terbentuk suatu
rangkaian tertutup. Dengan adanya tegangan awal tadi, di rangkaian akan
mengalir arus. Arus tersebut akan menghasilkan fluksi di celah udara, sehingga di
stator akan terbangkit tegangan induksi sebesar E1. Tegangan E1 ini akan
mengakibatkan arus mengalir ke kapasitor sebesar I1. Dengan adanya arus sebesar
[image:54.595.187.475.89.224.2]menjadi E2. Tegangan E2 akan mengalirkan arus di kapasitor sebesar I2 yang akan
menyebabkan fluksi bertambah dan tegangan yang dibangkitkan juga akan
meningkat. Proses ini terjadi sampai mencapai titik keseimbangan E = VC seperti
ditunjukkan dalam Gambar 3.5. Dalam kondisi ini tidak terjadi lagi penambahan
fluksi ataupun tegangan yang dibangkitkan.
Gambar3.5. Proses pembangkitan tegangan.
Nilai kapasitor yang dipasang sangat menentukan terbangkitnya tegangan
atau tidak. Untuk terbangkitnya tegangan generator induksi, nilai kapasitor yang
dipasang harus lebih besar dari nilai kapasitor minimum yang diperlukan untuk
proses eksitasi. Jika kapasitor yang dipasang lebih kecil dari kapasitor minimum
yang diperlukan, maka proses pembangkitan tegangan tidak akan berhasil.
3.7 Kapasitor Eksitasi
Kapasitor adalah suatu peralatan listrik untuk menyimpan muatan listrik.
Konstruksi kapasitor pada umumnya terdiri dari dua buah konduktor yang
[image:55.595.248.412.222.382.2]Kapasitor eksitasi adalah salah satu sumber eksitasi yang digunakan
sebagai penghasil daya reaktif pada generator induksi. Dengan eksitasi yang
mencukupi, akan diperoleh kondisi optimal pengoperasian pembangkit dalam
bentuk faktor daya dan efisiensi yang tinggi, regulasi tegangan yang rendah dan
pada gilirannya akan memperbaiki keseluruhan performansi sistem. Sebaliknya
kekurangan eksitasi akan mengakibatkan generator induksi dapat kehilangan
tegangan (voltage collapse) dan ketidak-stabilan sistem. Sehubungan dengan
eksitasi, permasalahan yang dihadapi dalam penggunaan generator induksi yang
dioperasikan secara terisolasi adalah menyangkut :
1. Penentuan dan pengendalian tingkat eksitasi (besar kapasitor) yang
memberikan tingkat regulasi tegangan terminal serendah mungkin dalam
kondisi beban yang berubah (berbeda) pada suatu tingkat kecepatan penggerak
mula generator
2. Penentuan dan pengendalian tingkat eksitasi yang memberikan regulasi
tegangan terminal serendah mungkin pada suatu tingkat pembebanan dalam
kondisi putaran penggerak mula yang berbeda.
Besar nilai kapasitor eksitasi dapat diperoleh dengan persamaan di bawah
ini:
∆Q = V.I ..………..………..…….(3.5)
= V. c
X V
= Xc V2
………, Xc = fC π 2
∆Q = V2.2π. f. C ………...…(3.6)
C = f V
Q π 2 2
∆
………...………….(3.7)
Dimana:
∆Q : jumlah daya reaktif yang diperlukan (VAR)
C : kapasitansi kapasitor adalah suatu kemampuan kapasitor untuk
menyimpan muatan (Farad)
3.8 Pemasangan Kapasitor
Untuk sistem 3 fasa, kapasitor dapat dihubungkan dalam dua bagian yaitu:
1. Hubungan delta (∆)
2. Hubungan wye (Y)
3.8.1 Kapasitor Hubungan Delta (∆)
•
•
•
•
∆c
V
∆ C
[image:57.595.250.373.513.626.2]I
Gambar 3.6. Kapasitor terhubung delta
Apabila dihubungkan dengan hubungan delta (∆) seperti gambar 3.6, maka
C∆ perfasa = f V Q π 2 3 2 ∆
( Farad )…………...( 3.8)
3.8.2 Kapasitor Hubungan Wye ( Y )
•
•
•
•
•
•
•
•
CYV
I
CYGambar3.7. Kapasitor terhubung bintang
Apabila dihubungkan dengan hubungan bintang (Υ) seperti Gambar 3.7,
maka besar kapasitansi kapasitor adalah:
CY perfasa =
f V Q π 2 2 ∆
( Farad )………..(3.9)
Dari kedua hubungan kapasitor diatas, maka diperoleh persamaan untuk
kapasitor terhubung bintang dan delta sebagai berikut :
3 3 Y Y C C C C I I dan V
V ∆ = ∆ = ………..……...…(3.10)
Y Y Y Y C C C Y C C C C X I V Ic V I V
X 3 3
3 3 = = = = ∆ ∆ ∆ ……….…...…(3.11)
Untuk kapasitor yang terhubung bintang, kapasitor yang dibutuhkan tiga
3.9 Pengaruh Pembebanan Terhadap Arus Eksitasi
Dari gambar rangkaian ekivalen gambar 3.6, hubungan antara tegangan
keluaran dengan arus stator diperlihatkan pada persamaan berikut:
V = E1 – I1 ( R1 + jX1 ) ……..………..…(3.12)
I1 = IC + IL ……….……..……(3.13)
dimana,
V = tegangan keluaran generator (Volt)
E1 = ggl induksi yang dibangkitkan pada stator (Volt)
I1 = arus stator (Ampere)
IL = arus beban (Ampere)
Tegangan keluaran generator tergantung kepada antara lain komponen
magnetisasi arus stator I1. Tanpa adanya beban yang mampu memberikan arus
magnetisasi ini, tegangan keluaran generator ini akan hilang. Dalam generator
induksi penguatan sendiri, beban yang dimaksudkan dipenuhi dengan pemasangan
kapasitor eksitasi pada terminal generator.
3.10 Pembebanan Dengan Faktor Kerja Satu
Pembebanan dengan faktor kerja satu artinya generator hanya melayani
beban yang bersifat resistif (R). Beban yang bersifat resistif ini hanya menarik
arus kerja. Kenaikkan arus beban akan memperbesar rugi tegangan di tahanan
stator dan memperbesar kebocoron fluksi di reaktansi stator, sehingga tegangan
Penurunan tegangan keluaran akan menyebabkan arus eksitasi ikut
menurun, seperti diperlihatkan pada Persamaan (3.14).
IC =
C
X V
………...(3.14)
Proses penurunan tegangan keluaran berlangsung sampai tercapainya titik
[image:60.595.215.406.246.458.2]keseimbangan yang baru seperti ditunjukkan dengan Gambar 3.8.
Gambar 3.8. Tegangan fungsi arus eksitasi dengan faktor kerja satu
Pada Gambar 3.8, titik A merupakan titik kerja keadaan beban nol dengan
tegangan sebesar V1 dan arus eksitasi sebesar OA1. Saat generator induksi
dibebani, titik kerja turun menjadi titik B dengan tegangan keluaran generator
sebesar V2 dan arus eksitasi menjadi sebesar OC1 tersebut yang digunakan untuk
eksitasi hanya sebesar OB1, sedangkan sisanya sebesar B1C1 digunakan untuk
3.11 Proses Pengendalian Tegangan
Pada keadaan berbeban atau tanpa beban tegangan terminal generator
induksi penguatan sendiri dapat dinaikkan atau diturunkan dengan cara merubah
besar tegangan induksi pada rangkaian maknetik Xm sedangkan penambahan /
penurunan tegangan induksi hanya dapat terjadi bila arus yang mengalir pada Xm
ditambah atau dikurangi.
Berdasarkan karakteristik maknetisasi semakin besar arus maknetisasi,
maka Xm akan semakin kecil. Jadi perubahan tegangan induksi mengakibatkan
perubahan arus maknetisasi, adalah identik dengan penurunan Xm. Dari Gambar
3.9 dapat dilihat bahwa penambahan tegangan digambarkan dengan semakin
[image:61.595.164.461.396.611.2]kecilnya sudut kemiringan garis linearnya yang berpotongan dengan kurva.
Gambar 3.9. Kurva maknetisasi dan proses pengendalian tegangan
Sama seperti mesin–mesin listrik lainnya, Generator induksi pun
mempunyai batasan arus maknetisasi yang dapat menyuplai nilai Xm minimal.
yang mengalir pada rangkaian maknetis menjadi terlalu besar sehingga akan dapat
merusak mesin.
Dari sini dapat dimengerti bahwa tegangan induksi yang dapat dihasilkan
juga mempunyai batas. Besar tegangan induksi maksimum yang dapat dihasilkan
tergantung pada desain mesin induksi yang bersangkutan.
Pada pengaturan tegangan generator induksi, yang dilakukan adalah
menambah atau mengurangi nilai kapasitansi sehingga arus yang mengalir pada
rangkaian maknetiknya mengalami kenaikan atau penurunan sehingga tegangan
induksi yang diinginkan dapat terpenuhi.
Perubahan nilai kecepatan akan menyebabkan perubahan nilai Xm, hal ini
disebabkan oleh arus yang mengalir pada kapasitor adalah arus reaktif dan dilihat
dari rangkaian ekivalen perubahan arus reaktif yang pada rangkaian maknetis Xm.
Perubahan arus yang mengalir pada Xm akan menyebabkan perubahan nilai Xm itu
sendiri. Jadi hasil akhir dari perubahan nilai kapasitor adalah perubahan posisi
titik operasi generator induksi pada kurva magnetisasi.
3.12 Aliran Daya Nyata Generator Induksi Penguatan Sendiri
Diagram aliran daya nyata dan rugi-rugi daya generator induksi penguatan
Gambar3.10. Diagram aliran daya nyata.
Rugi-rugi gesekan dan angin Pg+a, rugi-rugi inti stator Pi biasanya dianggap
konstan dan disebut rugi-rugi beban nol. Sedangkan rugi-rugi tembaga stator dan
rotor tidak tetap dan besarnya sangat tergantung kepada arus beban. Diagram
aliran daya dan rugi-rugi daya nyata generator induksi dapat dinyatakan dengan
persamaan-persamaan sebagai berikut :
P1 = Pmek – P.g+a……….…...(3.15)
Pc = P1 - Pcu2……….…….…..………….(3.16)
P2 = Pc – Pcu1 – Pi………..………...(3.17)
dengan:
P1 = daya masukan rotor (Watt)
P2 = daya keluaran stator (Watt)
Pmek = daya mekanis dari prime mover (Watt)
Pg+a = rugi-rugi gesek dan angin (Watt)
Pi = rugi-rugi inti stator (Watt)
Pc = daya pada celah udara (Watt)
Pcu1 =rugi-rugi tembaga stator (Watt)
[image:63.595.190.464.94.236.2]3.13 Efisiensi
Sama halnya dengan mesin–mesin listrik yang lain, pada motor induksi
sebagai generator rugi–rugi terdiri dari rugi–rugi tetap dan rugi–rugi variabel.
Pada kondisi beban nol daya outputnya sama dengan nol, sehingga efisiensi
bernilai nol. Apabila motor induksi berbeban ringan, maka rugi–rugi tetap akan
lebih besar jika dibandingkan terhadap outputnya, sehingga efisiensi rendah. Jika
beban meningkat, maka efisiensinya juga akan meningkat dan akan menjadi
maksimum sewaktu rugi – rugi variabel sama dengan rugi–rugi inti. Efisiensi
maksimum terjadi saat 80 hingga 95 persen dari rated output. Jika beban
ditingkatkan secara terus–menerus hingga melampaui efisiensi maksimumnya
rugi–rugi beban akan meningkat dengan sangat cepat daripada outputnya,
sehingga efisiensi menurun.
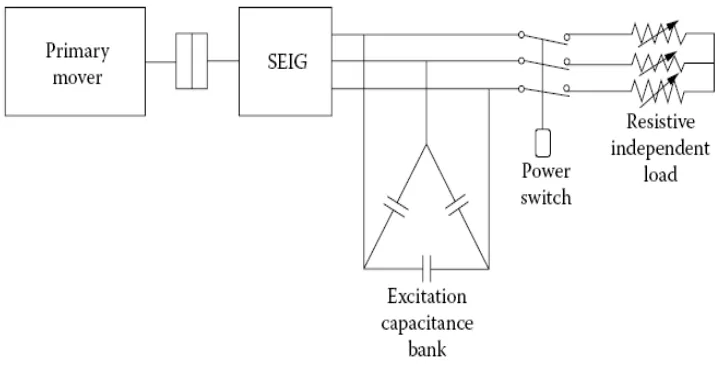
3.14 Motor Induksi Sebagai Generator Penguatan Sendiri Keadaan
Berbeban
[image:64.595.148.477.526.687.2]Adapun rangkaian generator induksi dalam dapat dilihat pada gambar:
Rangkaian ekivalen perfasa generator induksi berbeban diperlihatkan pada
[image:65.595.169.470.143.271.2]gambar berikut :
Gambar 3.12. Rangkaian ekivalen per fasa generator induksi keadaan berbeban
3.15 Persamaan Tegangan, Arus dan Daya Pada Generator Induksi
Penguatan Sendiri
Berdasarkan rangkaian ekivalen perfasa generator induksi maka dapat
dibentuk persamaan – persamaan sebagai berikut.