SKRIPSI
Laporan ini disusun untuk memenuhi salah satu syarat kelulusan menempuh pendidikan program Sarjana di Jurusan Teknik Elektro
Disusun Oleh :
SAEFUL ROHMAN 1.31.11.018
PROGRAM STUDI TEKNIK ELEKTRO
FAKULTAS TEKNIK DAN ILMU KOMPUTER
UNIVERSITAS KOMPUTER INDONESIA
BANDUNG
iv
Alhamdulillaahirabbil‟aalamiin. Segala puji dan syukur kepada Allah SWT
atas segala berkah, rahmat dan ni‟mat-Nya sehingga penulis dapat menyelesaikan perancangan alat dan penyusunan laporan tugas akhir dengan judul “Robot Kapal
Pembersih Sampah Di Air”. Dan juga tidak lupa shalawat serta salam senantiasa
tercurah kepada junjungan kita, Nabi Muhammad SAW beserta umat yang mengikuti ajarannya hingga akhir zaman. Penulisan laporan tugas akhir ini
disusun untuk memenuhi salah satu persyaratan untuk mencapai S-1 Jurusan Teknik Elektro, Fakultas Teknik dan Ilmu Komputer, Universitas Komputer Indonesia, Bandung.
Penulis menyadari bahwa tugas akhir ini jauh dari kata sempurna, dikarenakan keterbatasan penulis, baik dalam penyajian materi, sistematika
penulisan, sumber referensi, pengetahuan serta pengalaman penulis. Penulis mengharapkan tugas akhir ini dapat memberikan ilmu yang baik khusus bagi penulis dan umumnya pada pembaca.
Dalam penulisan laporan tugas akhir ini, banyak pihak yang sudah memberikan bantuan baik secara moril maupun materil. Oleh karena itu, dalam
kesempatan ini penulis ingin memberikan ucapan terima kasih kepada banyak pihak tersebut, khususnya kedua orang tua penulis, Ibu dan Ayah yang selalu
v Komputer Indonesia, Bandung;
2. Bapak Prof. Dr. H. Denny Kurniadie, Ir., M. Sc., selaku Dekan Fakultas
Teknik dan Ilmu Komputer, Universitas Komputer Indonesia, Bandung; 3. Bapak Muhammad Aria, M.T., selaku Ketua Jurusan Program Studi Teknik
Elektro Fakultas Teknik dan Ilmu Komputer, Universitas Komputer
Indonesia, Bandung;
4. Bapak Budi Herdiana, M.T., selaku Dosen Pembimbing yang selalu
memberikan arahan, ilmu, ide dan motivasinya kepada penulis selama pembuatan alat dan penulisan laporan tugas akhir ini;
5. Ibu Tri Rahajoeningroem, M.T., selaku Koordinator Tugas Akhir Program
Studi Teknik Elektro, Universitas Komputer Indonesia, Bandung;
6. Bapak Jana Utama, M.T., selaku Dosen yang diminta memberikan arahan,
ilmu, ide dan motivasinya kepada penulis selama pembuatan alat dan penulisan laporan tugas akhir ini;
7. Bapak Rodi Hartono, M.T., selaku Dosen dan Wali Dosen yang diminta
memberikan arahan, ilmu, ide dan motivasinya kepada penulis selama pembuatan alat dan penulisan laporan tugas akhir ini;
8. Bapak Bobby Kurniawan, M.T., selaku Dosen yang diminta memberikan
arahan, ilmu, ide dan motivasinya kepada penulis selama pembuatan alat
dan penulisan laporan tugas akhir ini;
9. Keluarga penulis, yang selalu memberikan doa dan motivasi mereka kepada
vi
selama ini seringkali berbagi pengalaman mereka, memberikan ide, ilmu dan motivasi mereka;
11. Berbagai pihak lain yang tidak bisa disebutkan satu persatu.
Penulis menyadari bahwa dalam penyusunan laporan Tugas Akhir ini masih
banyak kekurangan, sehingga penulisan laporan Tugas akhi ini masih jauh dari sempurna, namun demikian penulis berharap semoga laporan ini dapat bermanfaat
bagi semua pihak. Amin.
Bandung, Februari 2016
vii
1.6.2 Pemilihan dan Pengadaan Komponen ... 4
1.6.3Perancangan dan Pembuatan Hardware ... 5
1.6.4Pengujian dan Analisa ... 5
1.7Sistematika Penulisan Sistematika Penulisan ... 5
BAB II DASAR TEORI ... 7
2.1Sampah ... 7
2.2Visi Komputer (Computer Vision)... 8
viii
2.2..3 Ektrasi Warna ... 10
2.2.4 Morphology ... 12
2.3Komunikasi Data ... 14
2.3.1Aliran Komunikasi Data ... 15
2.3.2 Komunikasi Serial Universal Serial Bus (USB) ... 16
2.3.3Komunikasi Serial Inter Integrated Circuit (I2C) ... 17
2.4 Microcontroller ... 18
2.4.1Arduino IDE (Integrated Development Envirotment) ... 21
2.4.2 Bahasa Pemograman Ardino ... 22
2.5Perangkat Keras ... 28
2.5.1 Aktuator (penggerak) ... 28
2.5.2Kamera Webcam ... 29
2.5.3Licuid Crystal Diode (LCD) 2x16 ... 29
2.5.4ESC ( Electronic Speed Control) ... 30
2.5.5 Ultrasonik ... 31
2.5.6 Brushless ... 32
2.6 Perangkat Lunak MATLAB R2012a (Software) ... 32
BAB III PERANCANGAN... 34
3.1Blok Diagram Sistem ... 34
3.2Pemilihan Komponen ... 36
3.2.1 Mikrokontroler ... 36
3.2.2Brushless Motor ... 37
ix
3.2.6 LCD 2x16 ... 40
3.2.7Sensor Ultrasonik ... 40
3.3Perancangan Alat ... 41
3.3.1Perancangan Mekanik Kapal ... 41
3.3.2 Perancangan Hardware... 44
3.3.2.1 Electronic Speed Control (ESC) , Brushless dan Catu daya ... 44
3.3.2.2 Sensor Ultrasonik HC-SR04 ... 45
3.3.2.3LCD 2x16 ... 45
3.3.2.4Kamera Webcam C310 ... 46
3.3.2.5Mikrokontroler Arduino Mega ... 47
3.4Perancangan Software ... 48
BAB IV PENGUJIAN DAN ANALISA ... 53
4.1Pengujian Komponen ... 53
4.1.1Pengujian Sensor Ultrasonik ... 53
4.1.2 Pengujian Brushless ... 56
4.1.3Pengujian LCD 16x2 ... 58
4.1.4Pengujian Kamera ... 59
4.2Pengujian Kapal Bermanuever ... 64
4.3Pengujian Eksekusi kapal Bermanuever ... 70
BAB V KESIMPULAN DAN SARAN ... 74
5.1Kesimpulan ... 74
x
1
PENDAHULUAN
1.1 Latar Belakang
Dalam dunia robotika telah banyak yang diaplikasikan sebagai alat
pertahanan militer, evakuasi bencana alam, dan robot pemudah segala aktivitas manusia. Misalnya salah satu contoh Robot kapal .Robot kapal merupakan
wahana baru yang mulai dikembangkan di Indonesia dengan sistem robot tanpa awak yang dapat dikendalikan secara otomatis (Autonomous) atau manual
(Remote Control).Berdasarkan hal tersebut, perlu dirancang sebuah mobile robot yang memiliki kemampuan untuk bernavigasi dan dapat memonitoring yang beroperasi diatas permukaan air. Mobile robot yang dirancang adalah robot boat
penjaring sampah di air atau kapal tak berawak.
Perkembangan di bidang teknologi kapal tak berawak ini juga mampu
memberikan nilai lebih untuk kebersihan dan meminimalisir kerja manusia, karena teknologi ini dapat dikendalikan melalui suatu pengendali atau controller
dan navigasi otomatis dengan menggunakan kamera yang berfungsi untuk
memonitoring sampah yang akan dijaring yang terhubung dengan notebook sebagai converter tindakan yang kemudian terhubung dengan Arduino Mega
untuk melakukan eksekusi.
Keseimbangan, keakuratan image processing, dan maneuver yang baik menjadi kelebihan dari kapal tak berawak yang dirancang. Kekurangan dari kapal
penjaringan sampah yang dilakukan oleh kapal tersebut untuk bermanuever.
Penelitian ini memilih topik mengenai kapal penjaring sampah diair masih sedikitnya riset dan perlunya pengembangan teknologi dalam bidang image
processing.
Berdasarkan penelitian sebelumnya yang berhubungan dengan image processing seperti rancang bangun robot boat navigasi tanpa awak dan navigasi
mobile robot , maka dalam tugas akhir ini dilakukan perancangan sistem navigasi dan monitoring kapal tak berawak dengan fitur tambahan yang beroperasi untuk
menjaring sampah diatas permukaan air.
1.2 Identifikasi Masalah
Berdasarkan latar belakang yang telah dikemukakan, maka dapat
diidentifikasi permasalahan dalam tugas akhir ini yaitu sebagai berikut.
1. Belum adanya kapal tak berawak untuk melakukan penjaringan sampah
dipermukaan air dengan image processing.
2. Belum adanya algoritma sistem kapal tak berawak untuk bermaneuver
menuju koordinat sampah yang ditentukan.
3. Masih kurangnya penelitian program yang tertanam pada sistem yang
digunakan untuk pengendalian kapal secara semi otomatis menggunakan
1.3 Rumusan Masalah
Adapun rumusan masalah yang diperlukan agar dapat membantu dalam penyelesaian masalah di penelitian ini.
1. Bagaimana merancang sistem pendeteksian objek sampah dengan image
processing?
2. Bagaimana merancang algoritma sistem kapal tak berawak untuk
bermaneuver menuju koordinat sampah yang ditentukan ?
3. Bagaimana membuat program yang tertanam pada sistem yang digunakan
kapal untuk bermanuever yang objek dideteksi image processing dan melakukan penjaringan sampah dipermukaan air.
1.4 Tujuan
Adapun tujuan dari penelitian tugas akhir ini adalah sebagai berikut.
1. Merancang sistem pendeteksian objek sampah yang telah ditentukan
menggunakan image processing .
2. Merancang algoritma sistem yang dapat membuat kapal bermaneuver
menuju keberadaan objek sampah yang telah diproses image processing. 3. Merancang kapal untuk bermanuever yang objek dideteksi image
1.5 Batasan Masalah
Terdapat batasan masalah dalam pengerjaan tugas akhir ini yaitu.
1. Objek sampah yang ada dipermukaan air serta dibatasinya objek sampah
yaitu styreoform dan botol plastik berwarna biru dimana objek diolah melalui MATLAB untuk melakukan image processing.
2. Input koordinat menggunakan kamera sebagai image processing.
3. Pengolahan data sampah yang ditentukan diproses menggunakan
notebook dan bergerak serta melakukan proses penjaringan sampah
diproses menggunakan Arduino Mega 2560.
1.6 Metode Penelitian
Metode penelitian yang akan dilaksanakan untuk tugas akhir ini adalah
sebagai berikut.
1.6.1 Studi Literatur
Melakukan studi literatur terhadap beberapa referensi yang berkaitan
dengan tugas akhir yang dilakukan. Topik-topik yang akan dibahas meliputi: komunikasi serial, image processing, robot kapal penjaringan sampah di air dan
sistem mikrokontroller.
1.6.2 Pemilihan dan Pengadaan Komponen
Melakukan pengamatan dan memeriksa ketersediaan komponen yang
1.6.3 Perancangan dan Pembuatan Hardware
Pembuatan rangkaian-rangkaian sensor, penempatan komponen pada kapal, perancangan mikrokontroler dan perancangan software.
1.6.4 Pengujian dan Analisa
Melakukan tahapan-tahapan pengujian sebagai berikut.
1. Uji coba kamera dengan objek yang telah ditentukan yang terhubung
dengan notebook untuk melakukan image processing. 2. Uji coba motor brushless.
3. Uji coba kapal saat maneuver dengan melakukan berulang kali.
4. Pengujian secara keseluruhan sistem agar dapat di analisi ketika terjadi
kerusakan pada hardware maupun software.
1.7 Sistematika Penulisan
Sistematika penyusunan laporan tugas akhir ini meliputi.
BAB I PENDAHULUAN, membahas tentang latar belakang, identifikasi masalah, perumusan masalah, tujuan tugas akhir, batasan masalah, metode penelitan dan sistematika penulisan.
BAB II DASAR TEORI, menjelaskan tentang teori-teori dasar yang dipakai untuk mengerjakan tugas akhir ini.
tentang perancangan desain yang akan dibuat, blok diagram sistem,
perancangan mekanik, perancangan hardware dan perancangan software.
BAB IV PENGUJIAN DAN ANALISA DATA, pengambilan data dan menganalisis kesalahan-kesalahan yang muncul.
7
DASAR TEORI
2.1 Sampah
Sampah merupakan material sisa yang tidak diinginkan setelah berakhirnya suatu proses. Sampah didefinisikan oleh manusia menurut derajat
keterpakaiannya, dalam proses-proses alam sebenarnya tidak ada konsep sampah, yang ada hanya produk-produk yang dihasilkan setelah dan selama proses alam
tersebut berlangsung. Akan tetapi karena dalam kehidupan manusia didefinisikan konsep lingkungan maka sampah dapat dibagi menurut jenis-jenisnya.
1. Sampah organik - dapat diurai (degradable)
Sampah Organik, yaitu sampah yang mudah membusuk seperti sisa makanan, sayuran, daun-daun kering, dan sebagainya. Sampah ini dapat
diolah lebih lanjut menjadi kompos.
2. Sampah anorganik - tidak terurai (undegradable)
Sampah Anorganik, yaitu sampah yang tidak mudah membusuk, seperti plastik wadah pembungkus makanan, kertas, plastik mainan, botol dan gelas minuman, kaleng, kayu, dan sebagainya. Sampah ini dapat dijadikan sampah
komersil atau sampah yang laku dijual untuk dijadikan produk laiannya. Beberapa sampah anorganik yang dapat dijual adalah plastik wadah
2.2 Visi Komputer (Computer Vision)
Visi komputer merupakan ilmu yang mempelajari bagaimana komputer dapat mengenali objek yang akan diamati/ diobservasi. Hal ini dilakukan
bertujuan untuk dapat meniru visualisasi dari manusia yang diaplikasikan ke dalam komputer. Visi komputer terdiri dari 2 bidang ilmu yaitu.
1. Pengolahan Citra (image Processing)
Pengolahan Citra merupakan salah satu ilmu yang mempelajari bagaimana pemperbaiki kualitas citra agar mendapatkan hasil citra yang baik dan mudah
dikenali oleh manusia atau mesin.[1] 2. Pengenalan pola (Pattern recognition)
Pengenalan pola merupakan proses pengelompokkan data numerik dan
simbolik (termasuk citra) secara otomatis, yang bertujuan untuk dapat diidentifikasi objek pada citra.[1]
2.2.1 Model Warna RGB
Model warna RGB merupakan komponen yang terdiri dari warna dasar merah (Red), hijau (Green), biru (Blue) yang dapat dimodelkan atau di
aplikasikan dengan cara mereproduksi susunan warna untuk mendapatkan warna yang bervariasi. Rentang nilai untuk warna RGB yaitu antara 0-255. Untuk dapat menghitung nilai warna dan menampilkannya dalam model RGB maka dapat
Berikut ilustrasi hasil pencampuran warna RGB :
Gambar 2. 1 Model pencampuran RGB [1]
Dapat dilihat gambar dari pencampuran warna diatas setiap warna
memiliki rentang nilai dari 0-255, tingkat kehalusan dari sebuah citra dapat dilihat dari besar kecilnya satuan bit yang ditampilkan. Sebuah citra dengan ukuran 8 Bit
memiliki jumlah warna sebesar 28= 256 warna.
2.2.2 Metode Threshold
Threshold merupakan salah satu metode proses pemisahan citra dari nilai
derajat keabuan menjadi nilai biner (hitam putih), sehingga akan memudahkan proses identifikasi. Dengan menggunakan motode threshold yang semula hanya
memisahkan derajat keabuan, dengan menggunakan MATLAB maka didapatkan pemisahan citra yang beragam warna. Citra yang di threshold g(x,y) dapat
didefinisikan sebagai berikut :
g(x,y) = 1 �� �, ≥ �
0 �� �, < � ……... (2.1)
T = Threshold
Gambar 2.2 Citra asli
Gambar 2.3 Citra hasil thresholding
Gambar 2.2 merupakan gambar asli yang belum di threshold dan Gambar 2.3 merupakan gambar hasil dari citra RGB yang di rubah didalam image processing
pada MATLAB.
2.2.3 Ektrasi Warna
antara objek satu dengan lainnya pada tahapan identifikasi/ klasifikasi. Dan
contoh untuk memilih warna dalam setiap RGB ialah :
1. red=gambar(:,:,1); % memanggil matriks gambar yang hanya berisi piksel
warna merah.
2. green=gambar(:,:,2);% memanggil matriks gambar yang hanya berisi
piksel warna merah.
3. blue=gambar(:,:,3); % memanggil matriks gambar yang hanya berisi
piksel warna merah.
Contoh ektrasi warna pada warna biru :
Gambar 2.4 Citra asli untuk ektrasi
2.2.4 Morphology
Morphology adalah teknik pengolahan citra digital dengan menggunakan bentuk sebagai pedoman dalam pengolahan. Nilai dari setiap pixel dalam citra
digital hasil diperoleh melalui proses perbandingan antara pixel yang bersesuaian pada citra digital masukan dengan pixel tetangganya. Operasi morphologi bergantung pada urutan kemunculan dari pixel, tidak memperhatikan nilai
numeric dari pixel sehingga teknik morphologi sesuai apabila digunakan untuk melakukan pengolahan binary image dan grayscale image. Ada beberapa operasi
morphology yang dilakukan pada sistem pendeteksian ini diantaranya :
1. Penutupan (Closing)
Fungsi dari proses ini adalah untuk menghilangkan noise yang terdapat di
sekitar target, selain menghilangkan noise proses ini juga berfungsi untuk menghaluskan kontur atau tepian target sehingga membuat target yang
terdeteksi lebih halus.
Gambar 2.7b Hasil proses closing
Dari gambar 2.6a dan 2.7b di atas dapat dilihat perbedaan sebelum dan sesudah
proses closing, pada gambar 2.6a sebelum proses closing begitu banyak noise
yang terdeteksi tetapi setelah proses closing, noise yang ada dihilangkan sehingga
membuat target menjadi lebih baik dimana penutupan satu set ( citra biner ) A oleh penataan elemen B adalah erosi pelebaran set itu :
Dimana dan menunjukkan pelebaran dan erosi , masing-masing. Dalam
pengolahan citra , penutupan , bersama-sama dengan pembukaan , pekerja keras
dasar penghapusan kebisingan morfologi . Pembukaan menghilangkan
benda-benda kecil , sedangkan penutupan menghilangkan lubang-lubang kecil .[3]
2. Pengisian (Filling)
Gambar 2.8 Citra hasil proses filling
Hasil pengisian dimana sebelmnya pada gambar 2.8b titik tengah memiliki
lubang sehingga pada proses filling ini menghasilkan bentuk citra lebih baik sehingga objek dapat terlihat sepenuhnya. Dan rumus filling ialah :
(x,y) = 1− �, � �, ℎ � ��
0 � ……... (2.2)
Dimana setiap aplikasi ditentukan oleh pemilihan marker dan mask citra.
Dipilih citra yang dilakukan adalah menjadikan 0 disetiap tempat kecuali
border citra,dimana posisi tersebut diset menjadi 1 –f. [3]
2.3 Komunikasi Data
Komunikasi merupakan proses penyampaian berupa informasi dari satu tempat ke tempat lain. Sedangkan pengertian data merupakan informasi yang
disajikan dalam bentuk digital. Jadi, komunikasi data merupakan proses pengiriman informasi berbentuk data digital dari dua tempat yang berbeda melalui saluran transmisi, bisa antara perangkat komputer dan komputer atau perangkat
Gambar 2. 9 Blok diagram komunikasi sederhana
Keterangan untuk gambar diatas yaitu : a. Pengirim
Pengirim berfungsi sebagai alat/ media yang akan mengirimkan informasi
berupa data ke media transmisi. b. Media Transmisi
Media transmisi berfungsi sebagai alat/ media pembawa untuk menyam-paikannya informasi yang dituju.
c. Penerima
Penerima berfungsi sebagai alat/ media yang dikirim/ ditujuan.
2.3.1 Aliran Komunikasi Data
Aliran komunikasi data terbagi menjadi tiga kategori, yaitu sebagai berikut : 1. Simplex
Simplex merupakan komunikasi yang mengirimkan sinyal transmisinya
hanya satu arah
Gambar 2.10 Komunikasi satu arah 2. Half Duplex
Half Duplex merupakan komunikasi yang dapat mengirimkan data/ informasi dari dua arah namun dilakukan secara bergantian.
Pengirim
Penerima
Pengirim
Media
Tranmisi
Gambar 2.11 Komunikasi dua arah secara bergantian 3. Full Duplex
Full Duplex merupakan komunikasi yang dapat mengirimkan data/informasi dari dua arah secara bersamaan.
Gambar 2.12 Komunikasi dua arah secara bersamaan
2.3.2 Komunikasi Serial Universal Serial Bus (USB)
Universal Serial Bus (USB) adalah perangkat yang digunakan sebagai
perangkat penghubung antara piranti hardware dengan komputer. Perkembangan perangkat USB saat ini sudah ada 3 versi. Setiap versi memiliki kecepatan transfer
yang berbeda-beda, yang bertujan untuk meningkatkan efisien waktu pengiriman datanya. Untuk konektor USB ada 2 jenis konektor yaitu konektor tipe A dan
konektor tipe B, anya konektor yang sering digunakan untuk mengkoneksikan perangkat hardware dengan komputermenggunakan konektor tipe A.[1]
Gambar 2.13 Konektor USB tipe A dan tipe B [1]
Pengirim
Penerima
Penerima
Pengirim
Pengirim
Penerima
Standarisasi pin USB tipe A dan tipe B adalah sebagai berikut :
Tabel 2. 1 Konfigurasi saluran data konektor USB
Pin Nama Warna Kabel Keterangan
1 VBus Merah +5Vdc
2 Data- Putih Data -
3 Data+ Hijau Data +
4 Ground Hitam Ground
Keterangan mengenai saluran konektor USB adalah sebagai berikut: 1. VBus = Saluran input tegangan sebesar +5 VDC/ 100 mA.
2. Data - = Saluran data, data akan aktif ketika data - > data +. 3. Data + = Saluran data, data akan aktif apabila data + > data –.
4. Ground = Saluran Ground.
2.3.3 Komunikasi Serial Inter Integrated Circuit (I2C)
Komunikasi Inter Integrated Circuit (I2C) merupakan komunikasi serial
antara dua arah yang menggunakan dua saluran terdiri dari Serial Data (SDA) dan
Serial Clock (SCL) perangkat yang terhubung dengan sistem I2C bus dapat di
operasikan sebagai Master dan Slave. Master ini yang berfungsi sebagai pengendalisaat mentransfer, untuk slave berfungsi sebagai yang dikendalikan oleh
master.[4]
Penjelasan gambar di atas dapat di jelaskan sebagai berikut :
Bit pertama master akan mengirimkan berupa alamat slave, indikator akan mengecek apakah ada bit untuk baca/ tulis. Setelah itu slave akan mengirimkan bit
acknowledge, dan diteruskan untuk mengirim data bit dari slave ke master.
Master akan menerima bit dari slave, kemudian mengirimkannya kembali bit
acknowledge. Bit kedua dari terakhir master akan mengirimkan sinyal not
acknowledge, kemudian master mengirimkan sinyal bit berhenti.[4]
2.4Microcontroller
Microcontroller adalah sebuah komputer kecil yang terdapat di dalam
sebuah rangkaian terintegrasi. Microcontroller pada dasarnya terdiri CPU (Central Processing Unit), memory, input/output ports, timers and counters,
interrupt controls, analog to digital converters, serial interfacing ports dan
oscillatory circuits.[5]
Gambar 2.15 Blok Diagram Microcontroller [5]
a. CPU (Central Processing Unit)
CPU adalah otak dari sebuah microcontroller. CPU bertugas untuk mengambil setiap intruksi dalam bentuk kode dan melakukan decode
(menterjemahkan intruksi) ke dalam bahasa mesin untuk selanjutnya dilakukan eksekusi. CPU juga bertugas untuk menghubungkan setiap bagian dari microcontroller ke dalam sebuah sistem.
b. Memory
Fungsi dari sebuah memory adalah menyimpan setiap intruksi dan data
dari sebuah program. Microcontroller biasanya memiliki sejumlah memori seperti RAM, ROM/EPROM/EEPROM dan flash memory.
c. Parallel Input/Output Ports
Parallel input/output ports digunakan untuk melakukan interface dengan perangkat lain yang dibutuhkan untuk keperluan sebuah sistem seperti
LED, LCD, motor servo, fingerprint module dan lain-lain.
d. Serial Ports
Serial port digunakan untuk keperluan berbagai interface serial antara
mikrokontroler dan perangkat lain seperti halnya parallel port. e. Timers / Counters
Timers / counters merupakan salah satu fungsi yang sangat berguna dari mikrokontroler. Mikrokontroler memiliki lebih dari satu timer dan counter.
f. ADC (Analog to Digital Converter)
ADC berfungsi untuk mengkonversi sinyal analog menjadi digital. Konversi ini dilakukan dengan tujuan mendapatkan output berupa sinyal
digital, salah satu contohnya adalah pengukuran suhu yang hasilnya ditampilkan pada sebuah LCD.
g. Interrupt Control
Interrupt control digunakan untuk melakukan interupsi pada sebuah program ketika dieksekusi. Interrupt control memiliki dua jenis, yaitu
interrupt control internal (memakai intruksi interupsi) dan interrupt control eksternal (memakai akses pin interupsi).
h. Special Functioning Block
Special functioning block merupakan bagian tambahan pada sebuah
mikrokontroller untuk kebutuhan tertentu. Tidak semua mikrokontroller
menggunakan special functioning block.
Salah satu microcontroller yang paling banyak digunakan pada jaman
sekarang adalah arduino. Arduino adalah sebuah platform komputasi fisik yang bersifat open-source berbasis papan/board mikrokontroler sederhana. Hardwarenya menggunakan prosesor atmel AVR dan softwarenya memiliki
bahasa pemrograman sendiri yaitu C++ arduino. Salah satu alasan kenapa arduino
banyak dipakai adalah karena sistem pengoperasiannya yang cukup mudah.
Gambar 2.16 Bentuk Fisik Arduino [6]
Gambar 2.17 Tabel Spesifikasi Arduino [7]
2.4.1 Arduino IDE (Integrated Development Environment)
Arduino IDE adalah sebuah software untuk menulis program, mengedit
Gambar 2.18 Arduino IDE
2.4.2 Bahasa Pemograman Arduino
Bahasa Pemograman arduino sering disebut C++ arduino karena struktur
pemograman dan tipe datanya mirip dengan C++ pada umumnya. C++ arduino
terbagi menjadi 3 bagian utama, structure, variables dan function.[6]
1) Structure
a. Main Structure
void setup( ), nama fungsi yang telah disediakan oleh arduino uno
untuk menyatakan fungsi yang akan dijalankan pertama kali. Fungsi ini berisi kode-kode untuk kepentingan inisialisasi.
void loop( ) , fungsi yang secara otomatis dijalankan oleh arduino uno
setelah fungsi setup ( ) dieksekusi. Seluruh kode yang ada di fungsi dengan sendirinya akan diulang terus-menerus. Satu-satunya yang bisa menghentikan eksekusi loop ( ) adalah berhentinya input catu daya ke
papan arduino uno.
b. Control Structures
If….else, format pemogramannya seperti di bawah ini :
{aksi A}
else {aksi B}
Jika kondisi true maka output akan melakukan aksi A, jika kondisi
false output akan melakukan aksi B.
for, contoh format pemogramannya seperti di bawah ini :
for (inisialisasi ; kondisi ; penambahan / pengurangan)
contohnya : for (int i=0; i <= 255; i++){ analogWrite(PWMpin, i);
delay(10); }
loop akan terus berlangsung sampai kondisi terpenuhi, selama loop
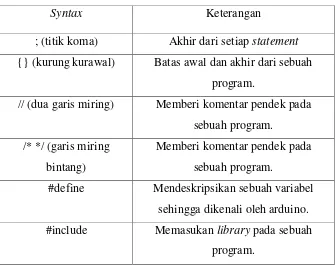
berlangsung kondisi akan terus dilakukan penambahan/pengurangan. c. Aturan Syntax
Tabel 2.2 Aturan Syntaq
Syntax Keterangan
; (titik koma) Akhir dari setiap statement
{} (kurung kurawal) Batas awal dan akhir dari sebuah program.
// (dua garis miring) Memberi komentar pendek pada sebuah program.
/* */ (garis miring bintang)
Memberi komentar pendek pada sebuah program.
#define Mendeskripsikan sebuah variabel sehingga dikenali oleh arduino. #include Memasukan library pada sebuah
d. Operator Aritmatika
Tabel 2.3 Operator Aritmatika
Operator Keterangan
+ Penjumlahan dan tanda positif.
- Pengurangan dan tanda negatif
/ Pembagian.
!= Operator “tidak sama dengan”
> Operator “lebih dari”
>= Operator “lebih dari atau sama dengan
< Operator “kurang dari”
f. Operator Boolean
Tabel 2.5 Operator Boolean
Operator Keterangan
&& Operator “AND”
|| Operator “OR”
2) Variable
a. Tipe Data
Tabel 2.6 Tipe Data C++ Arduino
Tipe Data Keterangan Kebutuhan
Memori
Boolean Tipe Boolean hanya dapat digunakan untuk menamp- ung dua nilai saja true atau
false
1 byte
Char Tipe char berguna untuk menyimpan sebuah nilai karakter seperti „A‟,‟9‟ dan „*‟.
1 byte
Unsigned Char Sama dengan tipe char, tetapi bilangan akan dikodekan dalam bentuk bilangan positif antara 0 sampai dengan 255.
1 byte
untuk menampung bilang-disimpan dari -3,4028235 E+38 sampai 3,4028235 E+38.
4 byte
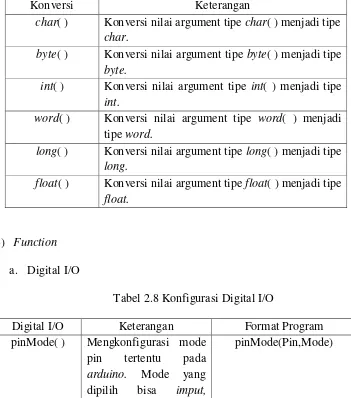
b. Konversi Tipe Data
Tabel 2.7 Fungsi-fungsi untuk konversi data
Konversi Keterangan
float( ) Konversi nilai argument tipe float( ) menjadi tipe
float.
3) Function
a. DigitalI/O
Tabel 2.8 Konfigurasi DigitalI/O
DigitalI/O Keterangan Format Program
pinMode( ) Mengkonfigurasi mode pin tertentu pada
arduino. Mode yang dipilih bisa imput, output dan
digitalWrite( ) Mengkondisikan high
Tabel 2.9 Konfigurasi AnalogI/O
Analog I/O Keterangan Format Program
analogReference( ) Mengkonfigurasi mo- de tegangan referensi untuk input analog.
analogWrite() Menulis nilai analog pada sebuah pin analog.
analogWrite(Pin,Value)
analogRead() Membaca nilai pada sebuah pin analog.
analogWrite(Pin)
c. Fungsi Matematika
Tabel 2.10 Fungsi Matematika
Fungsi Keterangan
min(x,y) Menghitung nilai minimum dari x dan y. max(x,y) Menghitung nilai maximum dari x dan y.
abs(x) Memberikan nilai absolut x.
pow(x,y) Memberikan nilai balik berupa xy. Hasilnya mempunyai tipe float.
float.
cos(x) Memberika nilai balik berupa cosinus x. Argumen x dinyatakan dalam radian. Hasilnya mempunyai tipe
float.
tan(x) Memberika nilai balik berupa tangent x. Argumen x dinyatakan dalam radian. Hasilnya mempunyai tipe
float.
2.5 Perangkat Keras
Berikut dibawah ini akan dijelaskan mengenai landasan teori dan fungsi komponen-komponen yang digunakan pada perangkat yang akan di rancang :
2.5.1 Aktuator (penggerak)
Aktuator merupakan perangkat mekanis yang berfungsi sebagai alat untuk menggerakkan suatu sistem. Aktuator akan berfungsi ketika diberi masukan berupa sumber tegangan. Terdapat 2 jenis aktuator berdasarkan sumber
masukannya yaitu aktuator AC dan Aktuator DC. Aktuator AC yaitu aktuator yang bekerja apabila diberi sumber masukannya berupa tegangan Alternating
Current (AC), sedangkan aktuator DC yaitu aktuator yang bekerja apabila diberi sumber masukannya berupa tegangan Direct Current (DC). Aktuator yang
2.5.2 Kamera Webcam
Gambar 2. 19 Kamera Webcam C310 [10]
Kamera Webcam merupakan komponen utama yang digunakan sebagai menangkap objek gambar. Resolusi dari kamera merupakan bagian yang menentukan dari kualitas gambar yang akan dihasilkan. Kamera ini bisa
dihubungkan dengan perangkat komputer karena memiliki komunikasi serial
USB. Dengan menggunakan perangkat komputer, kamera webcam ini dapat
mengakses gambar nyata lalu ditampilkan ke dalam monitor, dengan kamera
webcam ini digunakan untuk keperluan media sosial internet dengan beragam
jenis dari kamera dan resolusinya tinggi, maka gambar yang dihasilkan akan semakin baik.
2.5.3 Licuid Crystal Diode (LCD) 2x16
Gambar 2. 20 LCD 2X16
ukuran dot matrix 16 baris dan 2 kolom. LCD ini memiliki sumber daya yang
kecil dengan dilengkapi panel LCD serta memiliki kontroler LCD Complementary MetalOxide Semiconductor (CMOS) yang telah terpasang dalam modul tersebut.
LCD 2x16 ini memiliki sebuah memori yang dapat diakses yaitu Random Access Memory (RAM) dan display data RAM, memori tersebut berfungsi sebagai mempermudah pengguna untuk membuat suatu instruksi-instruksi yang akan
ditampilkan dengan dihubungkan ke mikrokontroler.[5]
2.5.4 ESC (Electronic Speed Control)
Gambar 2. 21 ESC (Electronic Speed Control)
Electronic Speed Control (ESC) adalah rangkaian elektronik yang berfungsi sebagai pengatur kecepatan putaran motor pada pesawat, helicopter dan kapal dengan cara menterjemahkan sinyal yang diterima receiver dari transmitter.
Seperti halnya motor, ESC juga dibedakan dua jenis, brushed ESC untuk brushed motor dan brushless ESC untuk brushless motor. Di pasaran terdapat berbagai
merk ESC dengan kekuatan arus (current rating) dan kekuatan voltase (voltage rating) serta feature yang ditawarkan. [2]
Untuk menentukan ESC yang akan digunakan sangatlah penting untuk
melebihi kekuatan motor. Misalnya, dari data kita dapatkan kekuatan motor
adalah 12A (ampere) pada saat throttle terbuka penuh. sebaiknya ESC yang akan kita gunakan adalah ESC yang berkekuatan 18A atau 20A. Jika kita paksakan
menggunakan ESC 10A kemungkinan pada saat throttle dibuka penuh, ESC akan panas bahkan terbakar. Pada perancangan robot kapal ini menggunakan menggunakan ESC 30A.
2.5.5 Ultrasonik
Gambar 2. 22 Ultrasonik HC-SR04
Sensor ultrasonik adalah sensor yang bekerja berdasarkan prinsip pantulan
gelombang suara dan digunakan untuk mendeteksi keberadaan suatu objek tertentu di depannya, frekuensi kerjanya pada daerah diatas gelombang suara dari 40 KHz hingga 400 KHz.Sensor ultrasonik terdiri dari dari dua unit, yaitu unit
pemancar dan unit penerima. Struktur unit pemancar dan penerima sangatlah sederhana, sebuah kristal piezoelectric dihubungkan dengan mekanik jangkar dan
hanya dihubungkan dengan diafragma penggetar.
Besar amplitudo sinyal elekrik yang dihasilkan unit sensor penerima tergantung dari jauh dekatnya objek yang dideteksi serta kualitas dari sensor
obyek sasaran. Jarak antara sensor tersebut dihitung dengan cara mengalikan
setengah waktu yang digunakan oleh sinyal ultrasonik dalam perjalanannya dari rangkaian Tx sampai diterima oleh rangkaian Rx, dengan kecepatan rambat dari
sinyal ultrasonik tersebut pada media rambat yang digunakannya. [2]
2.5.6 Brushless
Gambar 2. 23 Motor Brushless
Brushless motor merupakan motor yang mempunyai permanen magnet
pada bagian "rotor" sedangkan elektron-magnet pada bagian "stator"-nya. Secara umum, kecepatan putaran brushless motor yang keluar dari ESC diatur oleh pulsa
dari mikrokontroler, sehingga berbeda dengan brushed. Berikut adalah gambaran fisik dari motor brushless.
2.6 Perangkat Lunak MATLAB R2012a (Software)
Dalam proses pendeteksian target pada tugas akhir ini menggunakan sebuah Graphical User Interface (GUI). GUI adalah sebuah aplikasi dari MATLAB yang mengandung tugas, perintah, atau komponen program yang
pengguna dalam mengoprasikan sebuah program dalam MATLAB. GUI pada
tugas akhir ini dibuat dengan MATLAB R2012a seperti yang terlihat pada gambar di bawah ini.
34
OUTPUT PROCESS
PERANCANGAN
Pada bab ini akan membahas mengenai perancangan sistem. Perancangan ini akan terbagi menjadi 4 bagian utama, yaitu : blok diagram sistem, pemilihan
komponen, perancangan mekanik, perancangan hardware dan perancangan
software.
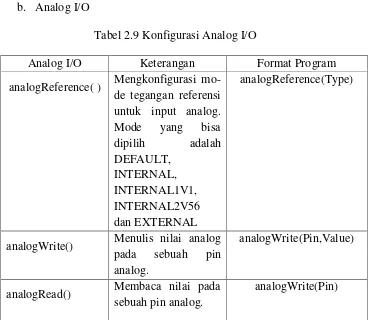
3.1 Blok Diagram Sistem
Blok diagram merupakan gambaran dasar dari sistem yang akan dirancang.Setiap bagian dari blok diagram memiliki fungsi masing-masing, dengan memahami gambar blok diagram maka sistem yang akan dirancang sudah
dapat dikenali dengan baik. Adapun gambaran dari blok diagram sistem yang akan dirancang adalah sebagai berikut.
Gambar 3. 1 Blok diagram sistem
Keterangan blok diagram diatas adalah sebagai berikut.
1. Webcam
Berfungsi sebagai sensor mengambil citra target berupa objek sampah yang berwana yang nantinya akan diproses oleh GUI MATLAB.
2. Notebook
Berfungsi sebagai proses sistem pengolahan citra untuk mengenal objek
sampah berwarna. 3. Ultrasonik
Berfungsi untuk mendeteksi halangan kanan dan kiri dari kapal.
4. Mikrokontroler
Berfungsi sebagai media proses yang mengontrol seluruh sistem.
5. ESC 1
Berfungsi sebagai pengontrol atau mensuplai arus ke motor brushless 1. 6. ESC 2
Berfungsi sebagai pengontrol atau mensuplai arus ke motor brushless 2 7. Baterai 1
Berfungsi sebagai sumber masukan untuk ESC 1. 8. Baterai 2
Berfungsi sebagai sumber masukan untuk ESC 1. 9. Motor Brushless 1
Berfungsi sebagai penggerak kapal saat kapal akan bergerak maju dan
bermaneuver. 10. Motor Brushless 2
11. LCD 2x16
Berfungsi sebagai menampilkan nilai dari data kompas dan menampilkan pulsa motor kiri dan motor kanan.
12. Jaring Sampah
Berfungsi sebagai menjaring sampah yang terapung di sungai.
3.2 Pemilihan Komponen
Pemilihan komponen merupakan suatu proses awal untuk mengetahui
komponen yang akan digunakan pada sistem elektroniknya. Dengan topik bahasan mengenai komponen-komponen yang digunakan, studi komponen, dan perancangan sistem.
3.2.1 Mikrokontroler
Mikrokontroler merupakan sebuah chip yang dapat diprogram untuk menghasilkan keluaran yang diinginkan dengan memasukkan program yang
digunakan di dalam chip tersebut. Arduino Mega adalah mikrokontroler yang menggunakan chip berjenis AVR atmega 2560 yang diproduksi oleh perusahaan
atmel, dalam penggunaannya arduino ini mudah digunakan dikarenakan sudah
terdapat bootloader untuk menangani proses upload program dari komputer. Tabel 3.1 Perbandingan jenis mikrokontroler
Spesifikasi
Tegangan masukan 7-12V 7-12V 7-12V
Jumlah pin I/O 14 54 14
Kecepatan Prosesor 16 16 16
RAM 2Kb 8Kb 1Kb
EEPROM 1Kb 4Kb 516 bytes
Kapasitas Arus 40 mA 40 mA 40 mA
Flash Memory 32 Kb 256 Kb 16 Kb
ADC Yes Yes Yes
Berdasarkan data perbandingan pada Tabel 3.2 diatas, mikrokontroler Arduino Mega 2560 dipilih karena dalam penggunaannya banyak membutuhkan
pin I/O dan memiliki kapasitas memori yang cukup sesuai dengan kebutuhan. Atau apabila memerlukan ukuran Flash Memory yang lebih besar karena program
yang dibuat sudah cukup tidak cukup dengan 32KB flash memory yang ada di Arduino Uno. Flash Memory sebesar 256KB yang ada di Arduino Mega 2560
rasanya sudah cukup besar untuk kebanyakan program di mikrokontroller .
3.2.2 Brushless Motor
Brushless motor merupakan motor yang mempunyai permanen magnet
pada bagian "rotor" sedangkan elektro-magnet pada bagian "stator" nya. Pada umumnya, kecepatan putaran brushless motor yang keluar dari ESC diatur oleh
pulsa dari mikrokontroler. Motor Brushless Turnigy D2836/8 merupakan motor yang memiliki rpm dan torsi yang besar.
Tabel 3.2 Perbandingan jenis motor brushless
Berdasarkan data perbandingan pada tabel 3.3 diatas, motor brushless
Turnigy D2836/8 dipilih karena daya yang diperlukan lebih sedikit serta memiliki daya dorong yang lebih besar dan berat yang lebih ringan.
3.2.3 Electronic Speed Controller (ESC)
Elektronic Speed Control (ESC) merupakan komponen yang berfungsi sebagai pengatur kecepatan motor, untuk menaikan jumlah arus yang diperlukan
oleh motor. ESC dapat dikatakan juga sebagai motor driver dengan mengeluarkan pulsa untuk motor brushless yang berasal dari mikrokontroler.
Gambar 3. 2 STAR Pro ESC Brushless 30A
ESC Brushless Pro 30 A dipilih karena konsumsi dayanya yang kecil, sehingga pemakaian baterai bisa tahan lama.
3.2.4 Kamera
Kamera merupakan alat yang digunakan untuk menangkap objek berupa gambar/citra. Kamera webcam C310 merupakan modul kamera yang dapat
dijalankan menggunakan perangkat bantu berupa PC/Laptop.
Tabel 3. 3 Tabel perbandingan jenis kamera webcam
Spesifikasi Jenis Komponen
C170 C310
Tegangan masukan USB 5 Vdc USB 5 Vdc
Video VGA VGA
Komunikasi Interface I2C I2C
Photo Quality 5 MP 5 MP
Koreksi cahaya No Yes
Berdasarkan data perbandingan tabel 3.4 diatas, kamera webcam C310
memiliki resolusi kamera yang besar yaitu 5 Mpx, dengan focus type yang lebih baik dan automatic lighting .
3.2.5 Catu Daya
Catu daya merupakan sebuah piranti penting dalam hal memberi input sumber daya pada suatu sistem. Pemilihan catu daya yang tepat akan
mempengaruhi kinerja dari suatu sistem yang akan dibuat. Banyak beragam jenis catu daya yang ada di pasaran, salah satunya catu daya LiPo (Lithium Polimer). Catu daya Litium Polimer (LiPo) merupakan jenis catu daya yang dapat di isi
ulang (rechargeable), di dalamnya tersusun beberapa inti sel yang disusun seri, yang bertujuan untuk meningkatkan kapasitas arus listrik yang dihasilkan. LiPo
yang digunakan di perancangan ini menggunakan LiPo 2500 mAh. Tabel 3. 4 Perbandingan jenis catu daya
Polimer tidak memiliki memori efek yang di hasilkan, sehingga saat di charging
ulang tidak harusmenunggu kosong.
3.2.6 LCD 2x16
Liquid Crystal Dependent (LCD) merupakan sebuah komponen yang
dapat menampilkan karakter yang berbentuk dari matriks baris dan kolom. LCD 2x16 merupakan sebuah komponen LCD yang terdiri dari 2 baris dan 16 kolom
yang dapat menampilkan karakter-karakter sesuai dari program yang dimasukan. Tabel 3. 5 Perbandingan jenis LCD
Spesifikasi Jenis Komponen
Lcd 2X16 LCD 4X16
Tampilan 16 karakter 2 kolom 16 karakter 4 kolom
Tegangan inputVideo 5 Vdc 5 Vdc
Memori 8 bit 8 bit
Karakter 32 64
Berdasarkan tabel 3.6 diatas, LCD 2X16 memiliki tampilan karakter yang cukup untuk menampilkan data keluaran dari mikrokontroler, data yang
digunakan sebanyak 32 karakter.
3.2.7 Sensor Ultrasonik
Secara umum sensor ultrasonik digunakan untuk menghitung jarak dari
suatu objek yang berada didepan sensor tersebut. Sehingga dengan fungsinya tersebut, sensor ultrasonik digunakan untuk mendeteksi halangan yang berada
Tabel 3. 6 Perbandingan jenis sensor ultrasonik
Sensor ultrasonic HC-SR04 ini dipilih karena dapat mendeteksi jarak dari
2cm – 400 cm dan memiliki harga yang relatif murah sehingga sensor ini dipilih untuk digunakan.
3.3 Perancangan Alat
Perancangan merupakan proses merancang atau mendesain suatu sistem yang akan dibuat serta diimplementasikan, di perancangan ini akan membahas
mengenai pembuatan kapal beserta implementasi komponen-komponen yang akan dipakai. Terbagi menjadi 3 bagian dalam perancangan sistem ini diantaranya :
perancangan mekanik, perancangan hardware dan perancangan software.
3.3.1 Perancangan Mekanik Kapal
Jenis dari kapal yang akan dirancang yaitu berjenis monohull, dimana jenis
monohull kapal memiliki kelebihan dalam bermaneuver yang cepat yang kemudian dimodifikasi dengan pemberi tambahan jaring sampah untuk menjaring sampah di air . Untuk ukuran maksimal panjang kapal keseluruhan = 85 cm,
Berikut ukuran gambar dari kapal telah dirancang ditunjukan pada
gambar dibawah ini :
Gambar 3. 3 Penempatan propeller
Gambar 3. 5 Tampak atas proses pendempulan
Gambar 3. 6 Penempatan komponen
Gambar 3. 8 Kapal tampak depan
3.3.2 Perancangan Hardware
Pada perancangan perangkat keras (hardware) ini meliputi pembahasan
mengenai: mikrokontroler, sensor, aktuator, ESC, kamera webcam, catu daya dan LCD 2X16.
3.3.2.1 Electronic Speed Control (ESC) , Brushless dan Catu daya
ESC yang digunakan di perancangan ini adalah ESC Brushless Pro 30A. ESC ini digunakan sebagai penguat sinyal pulsa dari mikrokontroler dan mengeluarkan yang besar digunakan untuk menjalankan motor brushless. Sumber
masukan ESC ini berasal dari catu daya Lithium Polimer sebesar 11.4V, untuk mengatur kecepatan dari motor brushless di atur melalui mikrokontroller dengan
Berikut konfigurasi dari pin konektor ESC dan catu daya :
Gambar 3. 9 Skematik konektor ESC , brushless dan catu daya
3.3.2.2 Sensor Ultrasonik HC-SR04
Sensor Ultrasonik HC-SR04 digunakan dalam perancangan ini sebagai pendeteksi halangan yang terpasang disisi sebelah kiri net. Sensor ini terhubung dengan mikrokontroller sebagai aksi untuk penggerakan aktuator motor brushless
untuk menghindari halangan. Dengan ini mengurangi resiko kapal terbentur dengan halangandisisi kiri dan kananya.
Berikut konfigurasi dari konektor motor servo seperti gambar berikut :
Gambar 3. 10 Skematik konektor sensor ultrasonic
3.3.2.3 LCD 2x16
LCD yang digunakan diperancangan sistem ini menggunakan LCD 2x16 karakter, yang digunakan sebagai indikator keluaran dari mkrokontroler yang menampilkan data kompas dan data pulsa motor sehingga akan mempermudah
Gambar 3. 11 Skematik rangkaian LCD 2x16
3.3.2.4 Kamera Webcam C310
Modul kamera yang digunakan di perancangan ini adalah webcam C310 untuk mengambil data berupa gambar/citra analog yang diolah menjadi citra
digital. Dimana webcam ini memerlukan perangkat PC/notebook yang dihubungkan melalui USB port agar dapat bekerja.Webcam C310 ini bekerja sesuai dengan perintah yang dibuat di notebook dengan menggunakan software
MATLAB R2012a.
Berikut konfigurasi dari kamera webcam C310 :
Gambar 3. 12 Skematik konektor USB kamera webcam
3.3.2.5 Mikrokontroler Arduino Mega
Mikrokontroler arduino mega merupakan modul pengendali dalam perancangan sistem kapal. Mikrokontroler arduino mega memiliki fasilitas USB
sebagai jalur komunikasi antara perangkat PC/Notebook dengan mikrokontroler dan memiliki pin ADC.
Mikrokontroler arduino mega menggunakan bahasa pemrograman C
sebagai bahasa pemrogramannya, untuk software pemrograman menggunakan
software editor arduino v1.0.6. Hardware dan software arduino adalah tipe open
source. Artinya tiap pengguna dapat membuat clone atau tiruan, tanpa harus membeli yang aslinya.
Gambar 3. 13 Gambar arduino mega rev3
Berikut konfigurasi pin mikrokontroller arduino mega yang digunakan dalam perancangan :
Tabel 3. 7Alokasi pin mikrokontroler arduino mega yang digunakan
Nama Pin Arduino No Pin Fungsi Keterangan
Digital PWM 12 Output (PD6) ESC1
Digital PWM 13 Output (PD7) ESC2
Power 5 V Output Vdd / +5 Backlight(LCD)
Power Gnd Output Vss / R/W / GND Backlight(LCD)
Power Gnd Output (Gnd) Ultrasonik HC-SR04
I/O(PD24) 25 Output/Input DB7(LCD)
I/O(PD26) 27 Output/Input DB6(LCD)
I/O(PD28) 29 Output/Input DB5(LCD)
I/O(PD30) 31 Output/Input DB4(LCD)
MOSI(PD32) 33 Output/Input Enable (LCD)
MISO(PD34) 35 Output/Input RS (LCD)
I/O(PD22) 6 Output/Input (PD22)Trigger
I/O(PD23) 7 Output/Input (PD23)Echo
Dari tabel 3.8 diatas, mikrokontroller arduino mega digunakan sebagai komponen utama yang mengontrol komunikasi dari perangkat PC/Notebook dengan aktuator yang terpasang dan sebagai pemprosesan olah data sensor
kompas sebagai navigasi untuk pergerakan kapal.
3.4 Perancangan Software
Pada perancangan perangkat lunak (software) ini meliputi pembahasan mengenai perancangan aplikasi berbasis komputer vision yang dapat mendeteksi
perbedaan warna pada suatu objek sampah yang mengambang di permukaan air menggunakan sebuah Graphical User Interface (GUI). GUI pada tugas akhir ini dibuat dengan MATLAB R2012a seperti yang terlihat pada gambar di bawah ini
Gambar 3. 14 Tampilan front panel MATLAB R2012a
Berikut adalah penjelasan dari keterangan pada tampilan gambar diatas, yaitu sebagai berikut :
1. Merupkan panel untuk menampilkan hasil pengambilan gambar berupa
video real time yang diambil oleh webcam.
2. Merupakan panel yang berfungsi untuk menampilkan proses pendeteksian
target.
3. Merupakan panel yang berfungsi untuk menghidupkan dan mematikan
webcam.
4. Merupakan panel yang berfungsi untuk memutuskan komunikasi antara
PC atau laptop dengan arduino.
5. Merupakan panel yang berfungsi untuk menutup fasiilitas GUI.
6. Merupakan panel yang berfungsi untuk memilih objek sampah yang akan
dideteksi.
7. Merupakan panel yang berfungsi untuk menampilkan arah kemana robot
8. Merupakan panel yang berfungsi untuk menampilkan kordinat dimana
Mulai
Mulai prosedur maju
Mulai prosedur belokkiri
Mulai prosedur belokkanan
Motor.WriteMicrosecond(1080) Motor.WriteMicrosecond(1130) Motor.WriteMicrosecond(1030)
Motor1.WriteMicrosecond(1080) Motor1.WriteMicrosecond(1030) Motor1.WriteMicrosecond(1130)
End End End
Mulai prosedur pelan
Motor.WriteMicrosecond(1060)
Motor1.WriteMicrosecond(1060)
End
53
HASIL DAN BAHASAN
Hal yang paling penting dalam merancang sebuah alat adalah berada pada
pengujian alat tersebut, apakah alat yang dirancang telah memenuhi target yang di tentukan atau tidak. Dengan dicapainya tujuan yang telah ditargetkan maka alat
tersebut dapat dikatakan proses perancangannya pun telah rampung. Oleh karena itu untuk mengetahui apakah alat yang dirancang ini telah mencapai tujuan atau tidak, pada bab ini akan dilakukan pembahasan mengenai pengujian secara
keseluruhan diawali pada bagian inputan kemudian proses dan terakhir oleh bagian outputnya.
4.1 Pengujian Komponen
Pengujian komponen bertujuan untuk mengetahui bahwa tiap komponen
dalam kondisi baik, sehingga memaksimalkan fungsi dari setiap komponen untuk mencapai sistem yang diharapkan. Ada beberapa pengujian yang dilakukan diantaranya pengujian sensor ultrasonic, , motor brushless, pengujian LCD 16x2
dan pengujian kamera.
4.1.1 Pengujian Sensor Ultrasonik
Prinsip kerja sebuah modul sensor ultrasonik yaitu mendeteksi objek dengan cara mengirimkan gelombang ultrasonik dan kemudian menerima pantulan gelombang tersebut. Sensor ultrasonik hanya akan mengirimkan
selama 200μS. Gelombang ini akan merambat di udara dengan kecepatan
344,424m/detik (1 cm setiap 29,034μS) mengenai objek untuk kemudian terpantul
kembali ke sensor ultrasonik.
Tujuan sensor ultrasonik ini ialah untuk mendeteksi sisi samping baik itu kanan dan kiri kapal untuk menghindar apabila ada dinding supaya tidak bergesekan atau benturan yang mengakibatkan kerusakan pada kapal.
Gambar 4. 1 Pengujian jarak sensor pada jarak 50cm
Berikut ini merupakan data hasil uji modul sensor ultrasonik dengan menggunakan alat ukur penggaris.
Tabel 4. 1 Hasil Sensor ultrasonik HC-SR04
11 15 15 31 175 175
12 20 20 32 187 187
13 25 25 33 195 195
14 30 30 34 207 207
15 35 35 35 220 220
16 40 40 36 225 225
17 45 45 37 230 230
18 50 50 38 235 235
19 55 55 39 240 240
20 60 60 40 250 250
(a)
Berdasarkan hasil pengujian pada Tabel 4. 1 Hasil Sensor ultrasonik
HC-SR04 dapat dilihat pengukuran yang didapat menggunakan sensor ultrasonik tidak terdapat perubahan nilai pada jarak dengan jarak pada HC-SR04. Dan dapat
dilihat pada Gambar 4. 2 (a) Kapal saat ada halangan disebelah kiri (b) Kapal menghindari halangan disampingny Jadi sensor ultrasonik bekerja dengan baik untuk mendeteksi objek serta maneuver kapal untuk menghindari dinding agar
tidak terjadi gesekan
4.1.2 Pengujian Brushless
Brushless motor merupakan motor yang mempunyai permanen magnet pada bagian "rotor" sedangkan elektro-magnet pada bagian "stator" nya. Pada umumnya, kecepatan putaran brushless motor yang keluar dari ESC diatur oleh
pulsa dari mikrokontroler. Motor Brushless Turnigy D2836/8 merupakan motor yang memiliki rpm dan torsi yang besar.
Electronic Speed Control (ESC) adalah rangkaian elektronik yang berfungsi sebagai pengatur kecepatan putaran motor pada kapal ini. Tujuan
pengujian ESC dan motor brushless ini ialah untuk menentukan kecepatan motor yang tepat buat maneuver kapal bekerja saat melakukan pencarian sampah di air.
Gambar 4. 4 Pengujian motor brushless pada kolam
Berikut ini merupakan data hasil uji motor brushless dengan mengatur kecepatan motornya oleh driver motor yang ditanamkan pada mikrokontroller
untuk melakukan kecepatan motor kapal yang diinginkan.
Tabel 4.2 Hasil uji coba motor brushless
No Pulsa Keterangan
1 500 ESC kalibrasi tidak aktif, motor tidak bergerak
2 750 ESC kalibrasi tidak aktif, motor tidak bergerak
3 900 ESC kalibrasi aktif,motor tidak bergerak
3 1000 ESC kalibrasi aktif,motor tidak bergerak
4 1100 ESC kalibrasi aktif, motor bergerak
5 1200 ESC kalibrasi aktif,motor bergerak
6 1400 ESC kalibrasi aktif,motor bergerak
7 1800 ESC kalibrasi aktif,motor bergerak
9 2100 ESC kalibrasi aktif ,motor bergerak
10 2200 ESC kalibrasi aktif ,motor bergerak
11 2400 ESC kalibrasi aktif , motor bergerak
12 2500 ESC kalibrasi aktif ,motor bergerak
Ditunjukkan bahwa pada pulsa 500-750 yang diberikan kepada ESC
hadilnya kalibrasi tidak aktif karena motor memiliki putaran minimal 1100 rpm. Dan dapat dilihat pada tabel motor brushless yang dapat bekerja pada pulsa
minimal 1100- 2500 yang ditanamkan pada ESC sehingga dapat disimpulkan bahwa motor akan bergerak atau aktif pada kisaran minimal pulsa 1100 yang ditanam pada miktrokontroller untuk mengatur driver motor yang menggerakan
brushless. Dan kinerja motor brushless ialah motor yang harus memiliki inisialisasi putaran awal motor pada program yang ditanamkan pada arduino
4.1.3 Pengujian LCD 16x2
Pengujian ini bertujuan untuk mengetahui bahwa LCD dalam kondisi baik untuk menampilkan setiap karakter baik kolom maupun baris yang dikirim
Gambar 4. 5 Pengujian LCD saat program mulai
Gambar 4. 6 Pengujian LCD untuk mengetahui maneuver kapal
Dari hasil pengujian diatas LCD menampilkan setiap karakter dengan jelas sesuai input yang diberikan dari arduino, sehingga dapat disimpulkan LCD dalam
kondisi baik tidak ada kerusakan.
4.1.4 Pengujian Kamera
Tujuan pengujian ini dirancang agar kamera dapat melakukan pendeteksian dengan baik objek dan warna serta kapal dapat bermanuever dengan baik yang dimana sensor objeknya dari kamera. Untuk memenuhi hal tersebut
objek melalui proses pengolahan citra. Pada pengujian ini, sebuah Graphical User
Interface (GUI). GUI adalah sebuah aplikasi dari MATLAB yang mengandung tugas, perintah, atau komponen program yang berfungsi sebagai media bantu
pengontrol untuk mempermudah user atau pengguna dalam mengoprasikan sebuah program dalam MATLAB. GUI pada tugas akhir ini dibuat dengan MATLAB R2012a untuk melakukan pendeteksian objek sampah styreoform
bewarna putih dan botol biru diatas permukaan air .Berikut ini merupakan data hasil uji kamera dirumah untuk mengetahui optimal atau tidaknya image
processing yang digunakan.
Tabel 4.3 Hasil uji coba image processing
No Gambar Keterangan
2 Maju
3 Kiri
5 Maju
6 Kiri
Gambar 4. 7 Pendeteksian objek styereoform yang error
Gambar 4. 8 Pendeteksian objek botol biru
Berdasarkan hasil Tabel 4.3 Hasil uji coba image processing diatas dapat disimpulkan bahwa pendeteksian objek styereoform putih ada error dikarenakan
pantulan cahaya matahari terhadap permukaan air terdeteksi putih yang akan mengakibatkan error pada maneuver dan penjaringan sampah tidak berjalan dengan baik seperti terlihat pada Gambar 4. 7 Pendeteksian objek styereoform
Dan pada Tabel 4.3 Hasil uji coba image processing diatas dapat dilihat no.
4 sampai 6 pendeteksian objek biru sangat baik dan dapat terlihat pada Gambar 4. 8 Pendeteksian objek botol biru dikarenakan pantulan cahaya matahari kurang
mempengaruhi dikarenakan objek diekstrasikan warnanya biru sehingga pantulan cahaya matahari tidak terdeteksi yang mengakibatkan error . Dan pengujian ini dapat disimpulkan bahwa pendeteksian sampah ini sangat baik pada objek sampah
botol biru. Dan untuk selanjutnya pengujian akan ditekankan pada objek sampah botol warna biru dikarenakan untuk melihat maneuver kapal dalam pendeteksian
dan penjaringan sampah .
4.2 Pengujian Kapal Bermaneuver
Pengujian ini bertujuan untuk mengetahui kapal bermaneuver mengikuti
objek sampah dan menjaringnya yang telah ditentukan menggunakan sensor kamera dimana semua perintah pengolahan citranya diproses di notebook yang kemudian dikirim kepada mikrokontroller untuk menggerakan aktuator. Kapal
akan bergerak lurus mengikuti objek sampah dan akan bermanuver belok kiri dan kanan sesuai dimana keberadaan objek sampah tersebut berada. Kemudian kapal
Tabel 4.4 Hasil uji coba maneuver kanan
No Gambar kapal Manuever kanan
1
2
4
Tabel 4.5 Hasil uji coba maneuver kiri
No Gambar kapal Manuever kiri
2
3
Tabel 4.6 Hasil uji coba maneuver maju
No Gambar kapal Manuever maju
1
2
4
Tabel 4.7 Hasil uji coba maneuver objek sampah botol biru
No Maneuver
maupun maju dengan persentasi keberhasilan 80-90% pada objek sampah botol biru. Kegagalan pada maneuver dipengaruhi oleh jarak cangkupan kamera yang
pada jarak 2 meter didepan dan 0.5 meter disetiap sisi kiri dan kanan ,karena
kamera merupakan inputan dimana semua perintah belok kanan dan kiri tersebut diolah oleh notebook dalam image processing yang kemudian di eksekusi oleh
miktrokontroller.
4.3 Pengujian Eksekusi Kapal Bermaneuver
Pengujian ini bertujuan untuk mengetahui kapal bermaneuver kemana
terlebih dahulu bila keberadaan sampah berada dikiri,tengah,dan kanan yang terdeteksi oleh kamera yang diproses image processing di MATLAB dan mengirimkan perintah kepada mikrokontroller untuk melakukan eksekusi
mengaktifkan brushless untuk kapal bermanuver mendekati objek dan menjaringnya.
Tabel 4.8 Hasil uji maneuver dengan 3 posisi sampah
No Gambar Eksekusi Manuver dengan 3 posisi sampah didepanya
2
3
Tabel 4.9 Hasil uji coba maneuver dengan 2 posisi sampah
No Gambar Eksekusi Manuver dengan 2 posisi sampah didepanya
1
2
3
Pada percoboan ini bahwa dapat dilihat ketika kapal dihadapkan dengan Tabel
4.8Hasil uji maneuver dengan 3 posisi sampah ,kapal akan bermanuver terlebih dahulu ke kanan karena pada image processing yang disegmentasikan pada notebook untuk mengirim serial “R” yaitu kanan dimana output pada notebook
merupakan inputan mikrokontroler untuk melakukan eksekusi kapal bermanuver belok kekanan. Karena baik 2 kondisi apabila objek terdeteksi pada segmentasi
sebelah kanan mikrokontroler akan mengutamakan belok kanan terlebih dahulu seperti tabel 4.9 no 3dan 4 sesuai dengan program yang tertanam pada
mikrokontroller . Dan pada tabel 4.9 no 1dan 2 bila keberadaan sampah berada dikiri dan tengah kapal danterdeteksi maka kapal akan mengeksekusi tengah terlebih dahulu yaitu “M” untuk maju. Dan apabila untuk kondisi satu objek
74
KESIMPULAN DAN SARAN
5.1. Kesimpulan
Berdasarkan hasil perancangan sistem dan hasil pengujian serta analisis yang telah dilakukan dari “Robot Kapal Pembersih Sampah Di Air” dapat diambil
beberapa kesimpulan.
1. Robot kapal dapat mendeteksi objek sampah yang ditentukan yaitu botol biru
dan styreoform .Tapi pada pendeteksian styreoform megalami error dikarenakan pantulan cahaya pada permukaan air dideteksi sebagai objek sampah seperti pada Tabel 4.3 dan Gambar 4.6.
2. Robot kapal dapat bermaneuver menuju keberadaan objek sampah yang telah
diproses oleh image processing dimana eksekusi manuever kapal ialah
maju,kanan dan kiri dengan keberhasilan 80-90%.
3. Kapal dapat bermanuever dan mendekati objek sampah yang telah dideteksi
image processing dimana kemudian kapal mendekati objek dan menjaring
sampah dipermukaan air seperti pada pengujian kapal bermanuver dan pengujian eksekusi kapal bermanuver .
5.2. Saran
Dari kesimpulan yang didapat, ada beberapa saran untuk perkembangan alat ini selanjutnya.
1. Image processing untuk pengenalan objek dikembangkan tanpa harus
2. Manuever kapal seharusnya dapat kembali setelah menjaring sampah yang
telah terjaring untuk dikumpulkan pada pembuangan sampah sementara. 3. Kapal dapat melakukan penyimpanan sampah pada kapal itu tersendiri atau
76
[1]. Nugraha,A.Yogi 2014,Implementasi Sistem Otomatis Pada Robot Kapal Berbasis Komputer Vision Untuk Kontes Kapal Cepat Tak Berawak
Nasional (KKCTBN) (hal 7 & 23), UniversitasKomputer Indonesia, Bandung
[2]. Sitohang ,Leonardus, 2014 ,Studi Komparasi Navigasi Robot kapal Berbasis Sensor Ultrasonik, Kamera dan Dead Rekoning, UniversitasKomputer Indonesia, Bandung
[3]. Prasetyo ,Eko, 2011, Pengolahan Citra Digital dan Aplikasinya menggunaka Matlab, Penerbit ANDI, Yogyakarta
[4]. https://nadiasnotes.wordpress.com/tag/tutorial/
[5]. http://www.circuitstoday.com/basics-of-microcontrollers
[6]. http://arduino.cc/en/Main/Products
[7]. https://learn.adafruit.com/adafruit-arduino-selection-guide/arduino-comparison-chart
[8]. 176-85-LOCC310(datasheet)
![Gambar 2.16 Bentuk Fisik Arduino [6]](https://thumb-ap.123doks.com/thumbv2/123dok/371597.220003/30.595.123.473.291.580/gambar-bentuk-fisik-arduino.webp)