ABSTRAK
PERANCANGAN ALAT PRAKTIKUM KLASIFIKASI DC CHOPPER PADA LABORATORIUM KONVERSI ENERGI ELEKTRIK
DC Chopper adalah salah satu alat elektronika daya yang sangat berkembang saat ini, yang mana konverter ini sangat memiliki banyak fungsi di dalam dunia industri salah satunya yaitu digunakan untuk mengatur kecepatan motor arus searah (DC), kontrol motor traksi pada automobil elektris, mobil trolley, kapal pengangkut dll. DC Chopper itu sendiri adalah sebuah piranti yang mengubah tegangan sumber arus searah (DC) yang tetap menjadi tegangan DC variabel yang dapat divariasikan dengan menempatkan saklar berkecepatan tinggi antara sumber dan beban.
Telah dilakukan percobaan klasifikasi DC chopper, yaitu percobaan klasifikasi dc chopper kelas A, chopper kelas B dan chopper kelas C. Percobaan ini dilakukan dengan menggunakan berbagai jenis saklar yaitu BJT, Mosfet dan IGBT. Pembangkitan sinyal PWM pada Mosfet, IGBT dan BJT tersebut dihasilkan dan dikendalikan oleh mikrokontroler Atmega 8535. Pada chopper kelas A, telah dibuktikan bahwa tegangan dan arus dapat bernilai positif (kuadran pertama). Pada chopper kelas B, tegangannya bernilai positif dan arus bernilai negatif (kuadran kedua). Kemudian pada chopper kelas C, tegangannya bernilai positif sedangkan arusnya dapat bernilai positif atau negatif (kuadran pertama dan kuadran kedua).
Bentuk signal gelombang pada MOSFET sudah hampir seperti kotak, hal ini disebabkan oleh waktu switching on dan off hampir sama. Ketika MOSFET diberi variasi dutycycle maka kenaikan tegangannya setiap interval lebih stabil dan mendekati nilai dari tegangan keluaran perhitungan. Waktu switching on pada IGBT lebih lama dari pada waktu off yang menyebakan nilai tegangannya selalu diatas dari nilai tegangan perhitungan. Waktu switching on pada BJT lebih singkat dari pada waktu off. Dari karakteristik masing-masing bentuk gelombang tersebut maka dapat disimpulkan bahwa switching yang baik adalah MOSFET karena waktu on dan off sudah hampir sama.
DAFTAR GAMBAR
Gambar Halaman
1.Rangkaian Chopper Kelas A ... 8
2.Bentuk Kuadran Kerja Chopper Kelas A ... 9
3.Rangkaian Chopper Kelas B ... 10
4.Bentuk Kuadran Kerja Chopper Kelas B ... 11
5.Rangkaian Chopper Kelas C ... 12
6.Bentuk Kuadran Kerja Chopper Kelas C ... 12
7.Diagram alir pengerjaan tugas akhir ... 22
8. Rancangan Chopper Kelas A ... 23
9.Rancangan Chopper Kelas B ... 24
10.Rancangan Chopper Kelas C ... 25
11.Rangkaian converter DC ke DC sederhana ... 25
12.Rangkaian Penguat Mosfet ... 27
14.Rangkaian Penguat BJT ... 28
15.Skematik chopper kelas A dengan Mosfet sebagai saklar ... 29
16.Skematik chopper kelas A dengan IGBT sebagai saklar ... 29
17.Skematik chopper kelas A dengan BJT sebagai saklar ... 30
18.Skematik chopper kelas B dengan MOSFET sebagai saklar ... 30
19.Skematik chopper kelas B dengan IGBT sebagai saklar ... 31
20.Skematik chopper kelas B dengan BJT sebagai saklar ... 31
21.Skematik chopper kelas C dengan MOSFET sebagai saklar ... 32
22.Skematik chopper kelas C dengan IGBT sebagai saklar ... 32
23. Skematik chopper kelas C dengan BJT sebagai saklar ... 33
24.Diagram alir kerja mokrokontroller. ... 34
25.Bentuk Pulsa Width Modulation (PWM) ... 38
26.Skematik Rangkaian Perangkat Keras ... 38
27.Transformator CT 1A ... 39
28.Rangkaian Power Supply ... 40
29.Rangkaian Pengendali Utama ... 40
30. Rangkaian Sevent Segment ... 41
32.Rangkaian Penguat IGBT ... 41
33.Rangkaian Penguat BJT ... 42
34.Rangkaian Penguat Mosfet ... 42
35.Kapasitor ... 43
36.Adaptor ... 43
37.Baterai ... 43
38.Rangkaian Chopper dan Rangkaian Ekivalen Kelas A ... 46
39.Contoh Rangkaian Penguat Klasifikasi DC Chopper ... 47
40.Mode Rangkaian Chopper Kelas A Pada Praktikum ... 48
41. Bentuk Gelombang Keluaran Chopper Kelas A ... 49
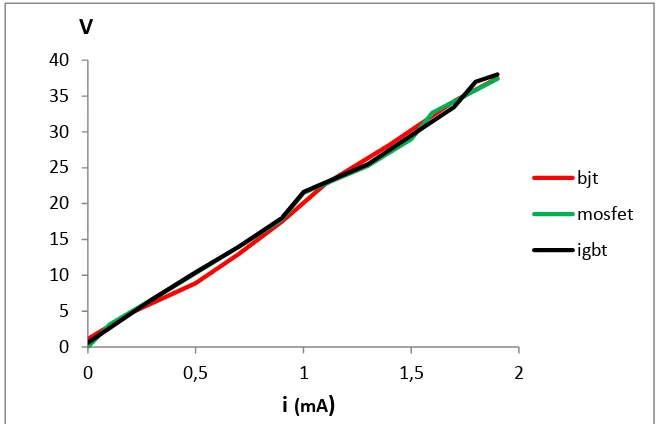
42.Hubungan V-I BJT, MOSFET dan IGBT (kwd I) dengan beban 10 kΩ dan V in 20 V ... 50
43.Hubungan V-I BJT, MOSFET dan IGBT (kwd I) dengan beban 20 kΩ dan V in 20 V ... 51
44.Diagram Kerja Kuadran Kesatu ... 52
45.Perbandingan V out BJT, MOSFET dan IGBT dengan Vin 20V dan R 10kΩ pada pengujian chopper Kelas A ... 52
dengan Vin 20V dan R 20kΩ pada pengujian chopper Kelas A ... 53
47.Bentuk Sinyal Gelombang Keluaran Mosfet, IGBT dan BJT Pada k=50% ... 53
48. Rangkaian Chopper dan Rangkaian Ekivalen Kelas B ... 55
49.Mode Rangkaian Chopper Kelas B Pada Praktikum ... 56
50. Bentuk Gelombang Keluaran Chopper Kelas B ... 57
51.Hubungan V-I BJT, MOSFET dan IGBT (kwd II) dengan beban 10 kΩ dan V in 40 V ... 59
52.Hubungan V-I BJT, MOSFET dan IGBT (kwd II) dengan beban 20 kΩ dan V in 40 V ... 60
53.Diagram kerja Kuadran kedua ... 61
54.Perbandingan V out BJT, MOSFET dan IGBT dengan Vin 40V dan R 10k pada pengujian chopper Kelas B ... 62
55.Perbandingan V out BJT, MOSFET dan IGBT dengan Vin 40V dan R 20k pada pengujian chopper Kelas B ... 62
56.Bentuk Sinyal Gelombang Keluaran Mosfet, IGBT dan BJT Pada k=80% ... 63
58.Contoh Rangkaian Penguat Chopper Kelas C ... 66
59.Mode Rangkaian Chopper Kelas C Pada Mosfet ... 66
60.Rangkaian Ekivalen Chopper Kelas C Pada Mosfet ... 67
61.Pengujian Signal Gelombang Dengan Dual Channel ... 69
62.Pengujian Masing-masing Signal Gelombang Dengan 2 Osciloscope ... 70
63.Signal Gelombang saklar 1 dan saklar 2 (40%) ... 71
64.Bentuk Sinyal Gelombang Keluaran Mosfet, IGBT dan BJT Pada k=30% ... 71
65. Hubungan V-I BJT, MOSFET dan IGBT (kwd I&II) dengan beban 10 kΩ dan V in 40 V ... 72
66.Hubungan V-I BJT, MOSFET dan IGBT (kwd I&II) dengan beban 20 kΩ dan V in 40 V ... 73
67.Diagram kerja Kuadran I&II ... 74
68.Perbandingan V out BJT, MOSFET dan IGBT dengan Vin 40V dan R 10k pada pengujian chopper Kelas C ... 74
DAFTAR ISI
Halaman
DAFTAR ISI ... vii
DAFTAR TABEL ... x
DAFTAR GAMBAR ... xi
I. PENDAHULUAN ... 1
A. Latar Belakang ... 1
B. Tujuan Penelitian ... 2
C. Manfaat Penelitian ... 3
D. Rumusan Masalah. ... 3
E. Batasan Masalah ... 4
F. Hipotesis ... 4
G. Sistematika Penulisan ... 4
II. TINJAUAN PUSTAKA ... 6
A. Pengenalan DC Chopper ... 6
B. Klasifikasi DC Chopper ... 6
1. Chopper Kelas A ... 8
2. Chopper Kelas B ... 9
3. Chopper Kelas C ... 11
D. Bahasa C ... 15
III. METODE PENELITIAN ... 20
A. Tempat dan Waktu Penelitian ... 20
B. Alat dan Bahan ... 20
C. Prosedur Kerja ... 21
1. Studi Literatur ... 23
2. Spesifikasi Rancangan ... 23
3. Perancangan Perangkat Keras ... 25
a. Konverter Dc-Dc sederhana ... 25
b. Sisitem Pengendali Utama ... 26
c. Rangkaian penguat ... 26
d. Gambar Skematik Rangkaian Perangkat Keras ... 29
4. Perancangan Perangkat Lunak ... 33
5. Pembuatan Alat ... 34
6. Pengujian Alat ... 36
IV. HASIL DAN PEMBAHASAN ... 37
A. Perangkat Lunak ... 37
1. Pemrograman Mikrokontroler ... 37
B. Perangkat Keras ... 38
C. Pengujian Alat ... 44
1. Pengujian input dan input mikrokontroler ... 44
2. Pengujian chopper ... 45
a. Chopper Kelas A ... 46
c. Chopper Kelas C ... 64
V. SIMPULAN DAN SARAN ... 76
A. Simpulan ... 76
B. Saran ... 77
DAFTAR PUSTAKA ... 78
DAFTAR PUSTAKA
Adriadi, Y. 2008.Pengaturan Putaran Motor Arus Searah Tipe Penguatan Bebas Menggunakan Konverter DC-DC Berbasis PC (Personal Computer). Universitas Lampung. Bandarlampung.
Bishop, O.2002. Dasar-Dasar Elektronika. Erlangga. Jakarta.
Fauzan, A.2008. Pengaturan Kecepatan Motor Induksi Tiga Fasa Tipe Rotor Belitan Menggunakan Chopper Berbasis Komputer. Universitas Lampung. Bandarlampung.
Rashid, M.1993.Elektronika Daya jilid 1. Pt Prenhallindo. Jakarta.
Wardhana, L. 2006. Belajar Sendiri Mikrokontroller Seri ATmega8535. Penerbil Andi. Yogyakarta.
DAFTAR TABEL
Tabel Halaman
1.Data hasil pengujian chopper kelas A
saat Vin = 40V dengan beban 10kΩ ... 50
2.Data hasil pengujian chopper kelas A
saat Vin = 40V dengan beban 20kΩ ... 51
3.Data hasil pengujian chopper kelas B
saat Vin = 40V dengan beban 10kΩ ... 59
4.Data hasil pengujian chopper kelas B
saat Vin = 40V dengan beban 20kΩ ... 60
5.Data hasil pengujian chopper kelas C
saat Vin = 40V dengan beban 10kΩ ... 72
6.Data hasil pengujian chopper kelas C
I. PENDAHULUAN
A. Latar Belakang dan Masalah
Dewasa ini, alat yang berhubungan dengan elektronika daya sangat diperlukan terutama pada sebuah industri yang dapat membantu proses produksi. Salah satu alat tersebut adalah konverter DC ke DC (DC Chopper), yang mana konverter ini sangat memiliki banyak fungsi di dalam dunia industri yaitu digunakan untuk mengatur kecepatan motor arus searah (DC), kontrol motor traksi pada automobil elektris, mobil trolley, kapal pengangkut dll. Dimana pengertian dari DC Chopper itu sendiri adalah sebuah piranti yang mengubah tegangan sumber arus searah (DC) yang tetap menjadi tegangan DC variabel yang dapat divariasikan dengan menempatkan saklar berkecepatan tinggi antara sumber dan beban (Rashid, M).
Mengacu pada perkembangan ilmu dan teknologi elektronika daya tersebut, maka kebutuhan akan praktikum elektronika daya sangat diperlukan guna mendukung kesuksesan dari matakuliah elektronika daya. Mengingat keterbatasan dan belum terlaksananya praktikum elektronika daya pada Laboratorim Konversi Energi
Energi Listrik Unila, maka tugas akhir ”Perancangan Alat Praktikum Elektronika
Daya Mengenai Klasifikasi DC Chopper” ini dirancang dan diharapkan dapat
segera dipakai agar praktikum elektronika daya dapat terlaksana.
Pada tugas akhir ini, akan dibuat chopper kelas A dan B, dan kelas C untuk membuktikan hasil gelombang keluaran dari chopper, apakah sesuai dengan teori yang diterapkan atau tidak dengan melakukan pengamatan melalui osiloskop. Dengan dirancangnya alat praktikum ini diharapkan mahasiswa dapat mengetahui keluaran, arus, serta gelombang keluaran dari ketiga bentuk klasifikasi dc chopper. Pengerjaan tugas akhir ini dititik beratkan pada pembuktian kuadran kerja dari masing-masing klasifikasi dc chooper dan gelombang hasil keluaran yang sesuai dengan teori yang didapat.
B. Tujuan Penelitian
Tujuan dari penulisan tugas akhir ini adalah:
1. Merancang tiga buah rangkaian klasifikasi DC chopper yaitu, chopper kelas A, chopper kelas B, dan chopper kelas C.
3. Menghasilkan suatu panduan modul praktikum klasifikasi DC chopper.
C. Manfaat Penelitian
Manfaat yang diharapkan dapat tercapai dalam pembuatan Tugas Akhir ini adalah:
1. Dapat diaplikasikan sebagai alat praktikum elektronika daya.
2. Memberikan kontribusi kepada mahasiwa sebagai bahan penelitian lebih lanjut tentang pengendalian kecepatan motor.
D. Rumusan Masalah
Bagaimana membuat tiga buah alat klasifikasi dc chopper, yaitu chopper kelas A, chopper kelas B dan chopper kelas C. Dengan menggunakan mikrokontroler ATMega8535 sebagai pengontrol Mosfet, IGBT, dan BJT yang berfungsi sebagai switching.
E. Batasan Masalah
Beberapa hal yang membatasi masalah dalam pembahasan tugas akhir adalah: 1. Menggunakan mikrokontroler jenis ATMega8535 sebagai rangkaian
kontrolnya.
4. Membuktikan kuadran kerja dari masing-masing klasfikasi DC chopper.
F. Hipotesis
Untuk mengatur ton dan toff pada klasifikasi dc chopper ini dapat dilakukan dengan menggunakan rangkaian kontrol mikrokontroler maupun function generator sebagai pengendali utamanya.
G. Sistematika Penulisan
BAB 1. PENDAHULUAN
Menjelaskan tugas akhir secara umum, berisi latar belakang, tujuan, manfaat penelitian, batasan, perumusan masalah, dan sistematika penulisan.
BAB 2. TEORI DASAR
Pada bab ini dijelaskan secara garis besar tentang teori dasar yang digunakan dan berhubungan dengan sistem yang dibuat.
BAB 3. METODE PENELITIAN
BAB 4. HASIL PENGUJIAN DAN PEMBAHASAN
Bagian ini berisi mengenai hasil pengujian dari percobaan dan membahas terhadap data-data hasil pengujian yang diperoleh.
BAB 5. KESIMPULAN DAN SARAN
II. TINJAUAN PUSTAKA
A. Pengenalan DC Chopper
Chopper adalah suatu alat yang mengubah sumber tegangan arus searah tetap menjadi sumber tegangan arus searah yang bersifat variable. Pengubah daya DC-DC (DC-DC-DC-DC Converter) tipe peralihan atau dikenal juga dengan sebutan DC Chopper ini dimanfaatkan terutama untuk penyediaan tegangan keluaran DC yang bervariasi besarannya sesuai dengan permintaan pada beban (Adriadi, Y).
Chopper digunakan pada regulator tegangan dc, dan juga digunakan pada penghubung dengan induktor, untuk membangkitkan sumber arus dc, terutama untuk pembalik sumber arus. Pada banyak aplikasi industri, diperlukan untuk mengubah sumber tegangan DC tetap menjadi sumber tegangan dc yang bersifat variabel. DC chopper mengubah secara langsung dari DC ke DC dan biasanya hal ini disebut konverter dc ke dc. Chopper dapat disebut sebagai DC, sama dengan transformator AC dengan perbandingan putaran yang terus menerus. Seperti transformator, chopper dapat digunakan untuk menaikkan dan menurunkan sumber tegangan DC (Fauzan, A).
.
B. Klasifikasi Chopper
Chopper dapat diklasifikasikan menjadi lima jenis berdasarkan pada arah arus dan tegangan yang mengalir yaitu (Rashid, M):
Chopper kelas A Chopper kelas B Chopper kelas C Chopper kelas D Chopper kelas E
1. Chopper Kelas A
Chopper kelas A ini hanya mengirimkan daya dari sumber ke beban.
R
SW
Vs
Gambar 1. Rangkaian Chopper Kelas A
Chopper kelas a ini adalah chopper kuadaran kesatu, karena kuadran kerja yang dihasilkannya berada pada kuadran kesatu. Tegangan dan arus beban nya adalah positif.
Tegangan keluaran rata-rata diberikan oleh
∫
Dan arus beban rata-rata,
∫ ) ⁄ √
Dengan mengasumsikan bahwa tidak ada rugi-rugi pada pada chopper maka daya masukan pada chopper sama dengan daya keluaran yang diberikan dengan
∫ ∫
V
i
Gambar 2. Bentuk Kuadran Kerja Chopper Kelas A
2. Chopper Kelas B
R
Vs SW E
L
Gambar 3. Rangkaian Chopper Kelas B
Chopper ini dapat juga disebut sebagai chopper kuadran kesatu, tetapi bekerja pada kuadran kedua. Tegangan beban positif, tetapi arus beban negatif.
Bila saklar Sw di on-kan, tegangan E menghasilkan arus melalui induktor L dan tegangan beban vL menjadi nol. Arus il, yang meningkat, dinyatakan sebagai berikut:
Dengan kondisi mula ) , memberikan
) Pada t = t1
Ketika saklar S1 di-off-kan, jumlah energi yang disimpan pada induktor L dikembalikan pada sumber Vs melalui diode D1. Arus beban iL akan jatuh. Dengan mendefinisikan ulang waktu mula t = 0, arus beban iL dinyatakan oleh
Dengan kondisi mula )
( ) Dengan )
i
V
Gambar 4. Bentuk Kuadran Kerja Chopper Kelas B
3. Chopper Kelas C
Chopper kelas C dapat juga disebut sebagai kombinasi chopper kelas A dan chopper
kelas B. S1 dan D2 bekerja seperti chopper kelas A, S2 dan D1 bekerja seperti
chopper kelas B. Harus dijaga hati-hati agar dua saklar tersebut tidak bekerja secara
bersama-sama;bila hal ini terjadi maka sumber Vs akan mengalami hubung singkat.
Vs
L
R
E
S1
S2
d1
d2
Gambar 5. Rangkaian Chopper Kelas C
Arus beban dapat positif atau negatif, sedangkan tegangan beban selalu positif. Ini
disebut chopper kuadran kedua.
i
V
Gambar 6. Bentuk Kuadran Kerja Chopper Kelas C
C. Mikrokontroler
komputer. Meskipun mempunyai bentuk elemen-elemen dasar yang sama. Secara sederhana, komputer akan menghasilkan output spesifik berdasarkan input yang diterima dan program yang dikerjakan. Seperti umumnya komputer, mikrokontroler adalah alat yang mengerjakan instruksi-instruksi yang diberikan kepadanya. Artinya, bagian terpenting dan utama dari suatu sistem terkomputerisasi adalah program itu sendiri yang dibuat oleh seorang programmer.Program ini menginstruksikan komputer untuk melakukan jalinan yang panjang dari aksi-aksi sederhana untuk melakukan tugas yang lebih kompleks yang diinginkan oleh programmer.yang jauh lebih kecil dari suatu komputer pribadi dan komputer mainframe.
ATMega8535
ATMega8535 memiliki fitur-fitur sebagai berikut:
a.Saluran I/O sebanyak 32 buah yaitu port A, port B, port C, dan port D. b.ADC 10 bit sebanyak 8saluran.
c.Tiga buah Timer/Counter dengan kemampuan pembanding. d.CPU yang terdiri atas 32 buah register.
e.WatchdogTimer dengan osilator internal. f. SRAM sebesar 512byte.
g.Memori Flash sebesar 8 KB dengan kemampuan Read While Write. h.Unit interupsi internal dan eksternal.
i. Port antarmuka SPI.
j. EEPROM sebanyak 512 byte yang dapat diprogram saat operasi. k.Antarmuka komparator analog.
l. Port USART komunikasi serial.
Kapabilitas detail dari ATMega8535 adalah sebagai berikut:
a. Sistem mikroprosesor 8 bit berbasis RISC dengan kecepatan maksimal 16 MHz.
b. Kapabilitas memori flash 8 Kb, SRAM sebesar 512 byte, dan EEPROM sebesar 512 byte.
Dalam penelitian ini dibutuhkan lebih dari satu buah saluran I/O yang dihubungkan dengan rangkaian konverter dc ke dc. Sehingga mikrokontroller yang digunakan harus mempunyai fitur dan port I/O yang memadai. Atas dasar ini maka digunakan mikrokontroler ATMega8535 sebagai pengendali utama.
D. Bahasa C
a. Format Penulisan Bahasa C
Untuk mengenal lebih jauh tentang bahasa C, kita terlebih dahulu harus mengenal struktur atau format penulisan program. Sehingga kita memiliki gambaran tentang bagian-bagian dalam pembuatan program (Wardhana, L).
Bagian Komentar Keterangan Program
Komentar digunakan untuk memberikan keterangan pada program agar mudah dibaca dan akan diabaikan oleh compailer.
Cara kerja:
/*……*/ untuk komentar bentuk paragrap
// untuk komentar bentuk per baris (sebelum enter)
Bagian preprocessor
Cara penulisan:
#include <………> untuk lokasi standar file yang telah di-setting oleh tools biasanya pada folder include atau folder direktori compiler.
#include “………” untuk lokasi file yang kita tentukan sendiri
Fileheader io.h adalah file yang berisi segala informasi atau definisi tentang register-register fungsi khusus (SFR) dan bit-bit atau pin-pin mikrokontroller AVR.
Bagian deklarasi variable global
Variable global dideklarasikan di luar semua fungsi termasuk fungsi utama dan letaknya harus di atas. Sifat variabel global yaitu dapat diakses aleh semua pernyataan dalam program.
Bagian Prototype Fungsi
Berfungsi untuk mendeklarasikan fungsi yang di bawah fungsi “main”. Jika kita membuat fungsi di atas fungsi “main” maka kita tidak usah
mendeklarasikan fungsi tersebut langsung tulis saja seperti fungsi
“x_pangkat_y”.
Bagian Fungsi Utama/main
Fungsi utama adalah fungsi pertama yang akan dieksekusi dengan urutan dari atas ke bawah dan akan loncat-loncat bergantung pada
instruksi loncatan “goto” atau instruksi panggilan fungsiatau terjadi
interupsi apabila interupsi diaktifkan
programmer dalam penulisan program yang besar. Jika kita membuat sebuah fungsi tanpa kita prototypekan maka harus ditulis diatas fungasi maindan ini menyulitkan untuk dibaca dan diperbarui sehingga kita butuh prototype fungsi.
b. Komentar
Komentar tidak akan dikompilasi oleh compiler. Komentar berguna bagi kita untuk membantu programmer mengingat kembali fungsi tiap pernyataan-pernyataan program.
c. Preprocessor
Preprocessor #include
Biasanya digunkan untuk menyertakan file header (.h) atau file library.
Preprocessor #define
Digunakan untuk mendefinisikan konstanta atau makro.
Preprocessor #if-#endif
Digunakan untuk mengetes ekspresi yang valid untuk mengolah kode program dibawahnya hingga #endif.
Preprocessor #if-#else-#endif
Digunakan untuk mengetes ekspresi yang valid untuk mengolah kode program di bawahnya atau jika tidak valid maka kode program di bawah #else hingga #endif.
Digunakan untuk mencari tahu apakah indetifief sudah didefinisikan? Jika ya akan mengeksekusi program di bawahnya.
Preprocessor #ifndef-#endif
Digunakan untuk mencari tahu apakah indetifier sudah didefinisikan? Jika belum maka akan mengeksekusi program dibawahnya.
Preprocessor #undef
Digunakan untuk menghilangkan identifier yang telah kita definisikan dengan #define, sehingga dapat didefinisikan ulang.
d. Pengenal (inditifier)
Pengenal digunakan untuk member nama variable, fungsi, konstanta dan lain-lain. Bahasa C bersifat case sensitive (huruf capital dan kecil dianggap berbeda). Konstruksi pengenal: huruf angka garis bawah( _ ). Tiap pengenal bisa menggunakan ketiga hal tersebut dengan catatan tidak boleh diawali dengan angka.
e. Variable
bilangan dari 0 sampai dengan 255 sedangkan jika bertanda -128 sampai dengan 127.
f. Larik (Array)
Array adalah variable yang berisi sekumpulan data yang mempunyai tipe data yang sama berbentuk matriks tunggal atau matrik multidimensional.
g. Operator
III. METODE PENELITIAN
A. Tempat dan Waktu
Penelitian dan perancangan tugas akhir ini telah dimulai sejak bulan Agustus 2009, dilakukan di Laboratorium Konversi Energi Elektrik dan Laboratorium Sistem Tenaga Elektrik jurusan Teknik Elektro Universitas Lampung.
B. Alat dan Bahan
Alat dan bahan penelitian mencakup berbagai instrumen, komponen, perangkat kerja serta bahan-bahan yang digunakan dalam proses penelitian, diantaranya: a. Instrumen dan komponen, yang terdiri dari:
- Osiloskop - Induktor - Dioda
- MOSFET (Metal Oxide Semiconduktor Field Efect Transistor) - BJT
- IGBT - Resistor
b. Perangkat kerja, yang terdiri dari: - Komputer pribadi (PC) - Papan projek (Project Board) - Power Supply
- Downloader AVR paralel - Kabel penghubung
c. Bahan-bahan, yang terdiri dari: - PCB
- Bahan plastik mika (acrilyc) - Socket Banana
- Solder, timah, dan beberapa peralatan pembersih solder timah
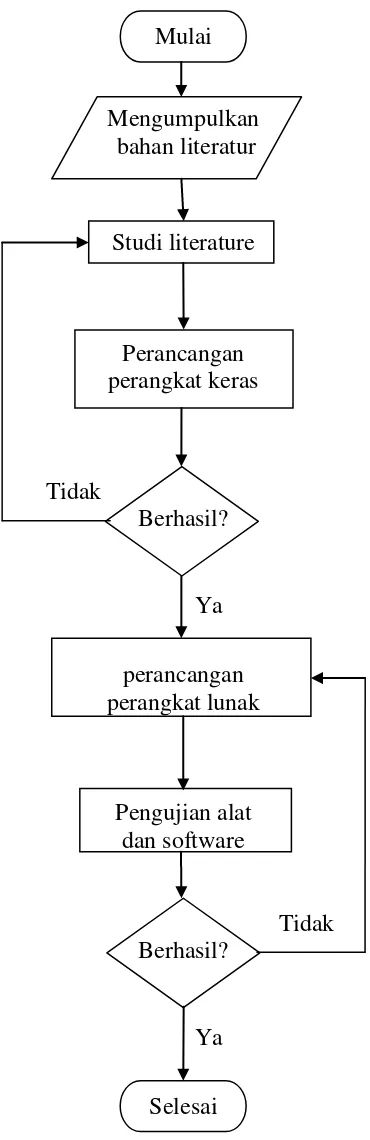
C. Prosedur Kerja
Dalam penyelesaian tugas akhir ini ada beberapa langkah kerja yang dilakukan untuk mencapai hasil akhir yang diinginkan, diantaranya:
1. Studi literatur
2. Spesifikasi Rancangan 3. Perancangan alat keras 4. Perancangan perangkat lunak 5. Pembuatan alat
Mulai
Mengumpulkan bahan literatur
Studi literature
Perancangan perangkat keras
Tidak
Berhasil?
Ya perancangan perangkat lunak
Pengujian alat dan software
Tidak Berhasil?
[image:35.595.220.405.74.644.2]Ya Selesai
1. Studi Literatur
Dalam studi literatur dilakukan pencarian informasi mengenai segala sesuatu yang berkaitan dengan penelitian ini, diantaranya adalah:
a. Konverter DC ke DC
b. MOSFET, BJT, IGBT sebagai media pensaklaran
c. Karakteristik komponen-komponen yang akan digunakan serta prinsip kerjanya
d. Cara kerja dan pemograman mikrokontroler jenis ATMega8535
2. Spesifikasi Rancangan
Spesifikasi rancangan alat keras pada tugas akhir ini ada 3 yaitu: a) Perancangan Chopper Kelas A
Pada perancangan chopper kelas A ini membutuhkan mosfet, BJT, dan IGBT sebagai saklar yang diberikan inputan PWM melalui Pemrograman ATmega 8535 serta keypad yang merupakan salah satu bagian output.
R1 R 2 SW K on tro l S eve n seg m en t K ey pa d
b) Perancangan Chopper Kelas B
Pada perancangan chopper kelas B ini juga akan memakai mosfet, BJT, dan IGBT sebagai saklar yang diberikan inputan PWM melalui Pemrograman ATmega 8535 serta keypad yang merupakan salah satu bagian output.
. R2 Vs SW E L R1 Ko n tro l Se ve n se g me n t Ke yp a d
Gambar 9. Rancangan Chopper Kelas B
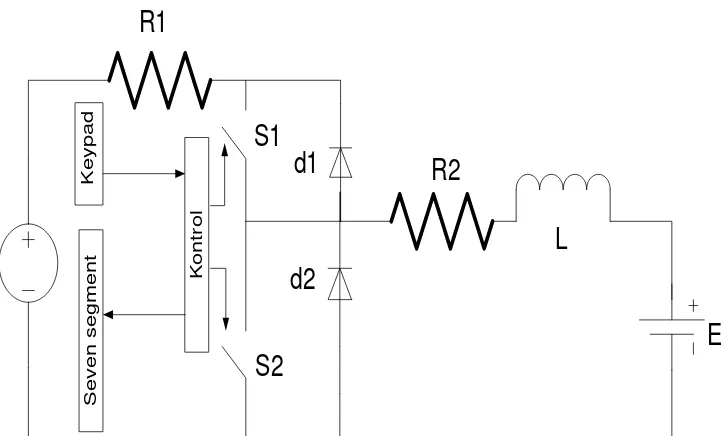
c) Perancangan Chopper Kelas C
R1
L
R2
E
S1
S2
d1
d2
Ko n tr o l Se ve n se g me n t Ke yp a dGambar 10.Rancangan Chopper Kelas C
3. Perancangan Perangkat Keras
a. Konverter DC ke DC sederhana
[image:38.595.133.496.86.304.2]Rangkaian konverter DC ke DC sederhana hanya terdiri dari sebuah Transistor, dioda, dan resistor. Rangkaian ini dapat digunakan untuk mengatur tegangan output pada chopper.
b. Sistem Pengendali Utama
Dalam penelitian ini untuk pengendali utama digunakan single chip mikrokontroler ATMega8535 dan kemampuan komunikasi serial secara UART serta In-System Programming (ISP). Modul ini dapat digunakan untuk pengendali PWM seperti dalam penelitian ini.
Spesifikasi modul Modul DT-AVR LowCost Micro System sebagai berikut : 1. Mikrokontroler ATMega8535 dengan 8 Kbyte Flash memory, dan 8
channel ADC (Analog to Digital Converter) dengan resolusi 10 bit.
2. Mendukung varian AVR 40 pin antara lain: ATMega8535, ATMega8515, AT90S8515, AT90S8535.
3. Memiliki jalur input/output hingga 35 pin.
4. Terdapat Eksternal Brown Out Detector sebagai rangkaian reset. 5. LED Programming Indicator.
6. Tersedia Crystal Oscillator 4 MHz.
7. Tersedia jalur komunikasi serial UART RS-232 dengan konektor RJ11. 8. Tersedia Port untuk Pemrograman secara ISP.
9. Tegangan input 9 – 12 VDC pada VIN dan memiliki tegangan output +5V (VCC).
c. Rangkaian Penguat
daya tersebut. Hal ini disebabkan karena port-port mikrokontroler ATMega8535 menghasilkan output arus yang tidak terlalu besar yaitu dalam ukuran mikroAmpere, dengan rating tegangan sekitar 0 – 5V (Bishop, O).
Untuk mencapai maksud tersebut di atas bisa dilakukan dengan menghubungkan transistor 2N2222 atau BC517 dengan beberapa resisitor. Rangkaian driver pada penelitian tugas akhir ini dapat dilihat seperti gambar.
Gambar. 12. Rangkaian Penguat Mosfet
Gambar. 14. Rangkaian Penguat BJT
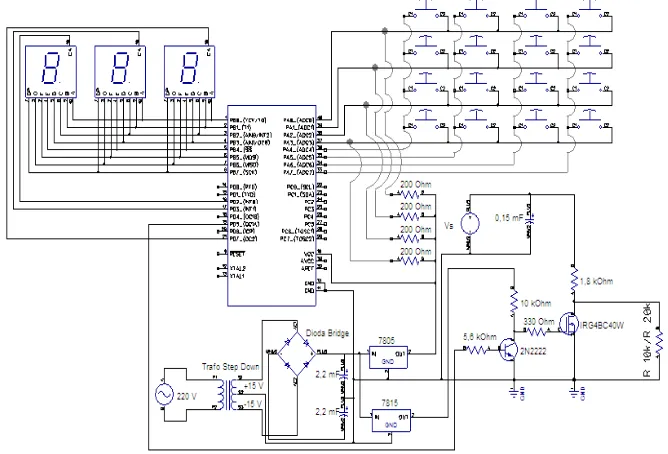
e. Gambar Skematik Rangkaian Perangkat Keras
[image:42.595.147.481.493.720.2]1. Skematik rangkaian chopper kelas A dengan Mosfet sebagai saklar
Gambar 15. Skematik rangkaian chopper kelas A dengan Mosfet sebagai saklar
2. Skematik rangkaian chopper kelas A dengan IGBT sebagai saklar
3. Skematik rangkaian chopper kelas A dengan BJT sebagai saklar
Gambar 17. Skematik rangkaian chopper kelas A dengan BJT sebagai saklar
4. Skematik rangkaian chopper kelas B dengan MOSFET sebagai saklar
5. Skematik rangkaian chopper kelas B dengan IGBT sebagai saklar
Gambar 19. Skematik rangkaian chopper kelas B dengan IGBT sebagai saklar
6. Skematik rangkaian chopper kelas B dengan BJT sebagai saklar
7. Skematik rangkaian chopper kelas C dengan MOSFET sebagai saklar
Gambar 21. Skematik rangkaian chopper kelas C dengan MOSFET sebagai saklar
8. Skematik rangkaian chopper kelas C dengan IGBT sebagai saklar
9. Skematik rangkaian chopper kelas C dengan BJT sebagai saklar
Gambar 23. Skematik rangkaian chopper kelas C dengan BJT sebagai saklar
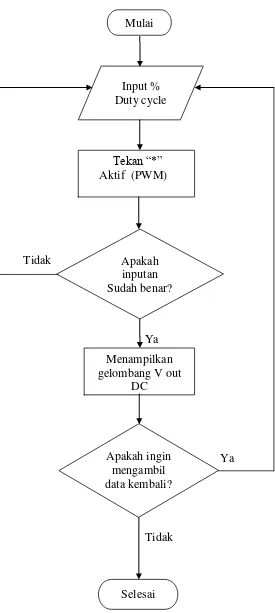
4. Perancangan Perangkat Lunak
Mulai
Apakah inputan Sudah benar?
Input % Duty cycle
Tidak
Ya
Ya
[image:47.595.197.472.83.696.2]Tidak
Gambar 24. Diagram alir kerja mokrokontroller. Menampilkan
gelombang V out DC
Apakah ingin mengambil data kembali?
Perangkat lunak yang direncanakan untuk mikrokontroller ATMega8535 mempunyai fungsi sebagai berikut :
1. Menerima input dari keypad.
2. Menampilkan input dari keypad ke seven segmen.
3. Memproses perintah dari keypad yang kemudian menjadi masukan bagi rangkaian konverter DC ke DC untuk mengatur dutycycle.
5. Pembuatan Alat
Tahapan berikutnya setelah perancangan adalah pembuatan alat berdasarkan rancangan yang telah dibuat tersebut. Adapun beberapa proses yang dilakukan dalam tahapan ini adalah:
a. Menuliskan algoritma program ke mikrokontroler. b. Membuat listing program pada PC.
c. Menggambar rangkaian elektronik menggunakan komputer dengan bantuan program aplikasi Diptrace.
d. Memplot hasil gambar rangkaian pada PCB. e. Melakukan pemasangan komponen pada PCB.
f. Melakukan penyolderan terhadap komponen dan PCB.
6. Pengujian Alat
IV. HASIL DAN PEMBAHASAN
A. Perangkat Lunak
1. Pemograman Mikrokontroler
Pada penelitian ini untuk memprogram mikrokontroler sendiri digunakan program CodeVision AVR dengan menggunakan bahasa pemograman C. Program yang di tuliskan memiliki perintah yaitu, memproses masukkan dari keypad yang kemudian ditampilkan pada seven segmen, selanjutnya mikrokontroller akan memberikan output berupa pengaturan PWM yang berfungsi untuk mengatur proses on-off pada rangkaian converter arus searah.
Gambar 25. Bentuk Pulsa Width Modulation (PWM)
B. Perangkat Keras
1. Gambar Skematik Rangkaian Perangkat Keras
Pada penelitian ini digunakan beberapa perangkat keras yang terhubung menjadi satu sistem.
1. Transformator
Transformator yang digunakan pada penelitian ini adalah Center Tap Transformer, dimana digunakan sebagai penurun tegangan dari 220 Volt ke 15 volt dan 5 Volt dengan rating arus sebesar 1 A.
Gambar 27. Transformator CT 1A
2. Rangkaian Power Supply
Gambar 28. Rangkaian Power Supply
3. Rangkaian Pengendali Utama
Rangkaian pengendali utama yaitu sebagai pengendali keypad, sevent segment dan PWM. Dalam hal ini yang dimaksud adalah rangkaian mikrokontroler Atmega 8535.
Gambar 29. Rangkaian Pengendali Utama
4. Rangkaian Sevent Segment
Gambar 30. Rangkaian Sevent Segment
5. Induktor
Induktor merupakan bagian dari suatu rangkaian Klasifikasi DC chopper yang akan digunakan pada chopper kelas B dan C.
Gambar 31. Induktor
6. Rangkaian Penguat IGBT
Rangkaian ini terdiri dari 2 buah jenis IGBT IRGBC40W, serta beberapa resisitor dan transistor 2n2222 yang berfungsi sebagai penguat IGBT.
7. Rangkaian Penguat BJT
[image:55.595.222.406.194.321.2]Rangkaian ini terdiri dari 2 buah jenis BJT BUV48a, beberapa resistor, transistor BC517, dan dioda yang berfungsi sebagai penguat BJT.
Gambar 33. Rangkaian Penguat BJT
8. Rangkaian Penguat MOSFET
Rangkaian ini terdiri dari 2 buah jenis Mosfet IRFP 450, beberapa resistor, transistor 2n2222, dan dioda yang berfungsi sebagai penguat mosfet.
Gambar 34. Rangkaian Penguat Mosfet
9. Kapasitor 150 µF
[image:55.595.231.394.486.612.2]Gambar 35. Kapasitor
10.Adaptor
[image:56.595.232.393.321.442.2]Adaptor dalam alat praktikum ini digunakan sebagai power supply kipas (fan).
Gambar 36. Adaptor 11.Baterai
Baterai ini memiliki tegangan 16V, yang digunakan pada saat percobaan chopper kelas B dan kelas C.
[image:56.595.247.396.590.707.2]C. Pengujian Alat
1. Pengujian input dan output mikrokontroller
Pengujian pada mikrokontroller meliputi pengujian pemberian inputan ke mikrokontroller dari keypad kemudian mengamati outputnya yaitu berupa bilangan yang ditampilkan oleh seven segmen dan pengaturan PWM untuk mengatur proses on-off pada converter arus searah.
2. Pengujian Chopper
Prosedur Pengujian
Pada penelitian ini digunakan peralatan tambahan untuk mendukung pengambilan data pada chopper kelas A, chopper kelas B maupun chopper kelas C yaitu Power supply 250v. Power supply digunakan untuk memberikan tegangan langsung kesalah satu kaki saklar yaitu sisi drain atau collector, yang nantinya akan di ganti-ganti nilai tegangan (variabel) sesuai dengan yang ditentukan. Sedangkan resistor sendiri dihubungkan kerangkaian chopper setelah melewati saklar.
Pada dasarnya prosedur pengujian chopper kelas A, chopper kelas B dan chopper kelas C dilakukan sama. Prosedur pengujian ini dilakukan dengan mengukur besarnya nilai power supply dan menyesuaikannya dengan resistor yang dibutuhkan, setelah itu lalu merangkai rangkaian percobaan yang ingin diuji pada box praktikum klasifikasi DC chopper yang telah dibuat dan menghubungkan saklar ke osciloscop. Kemudian menghubungkan rangkaian dc chopper ke Power Supply.
Pengambilan data dilakukan dengan menghidupkan power supply dan menaikkan
nilai tegangannya dari 20v, 40v dan 60v serta mengubah nilai resistor dari 10 kΩ
a. Chopper Kelas A
Pengujian Kelas A ini dilakukan dengan memvariasikan pensaklarannya dengan menggunakan tiga jenis transistor yaitu, BJT, MOSFET dan IGBT. Selanjutnya dilakukan dengan memvariasikan tegangan input, % duty cycle dan beban.
Dalam tugas akhir ini chopper Kelas A dibuat dengan menggunakan prinsip pembagi tegangan, seperti yang terlihat pada rangkaian dibawah ini.
a). Rangkaian Chopper Kelas A
b). Rangkaian ekivalen c).Rangkaian ekivalen
Saklar on = close Saklar off = open
B
G 15 V
Vs
Mikro
Ke rangkaian
2n2222
Gambar 39. Contoh Rangkaian Penguat Klasifikasi DC Chopper
Dengan memperhatikan gambar diatas, maka dapat dianalisa rangkaian dari chopper kelas A yang dapat dibagi menjadi 2 jenis rangkaian yaitu pada saat saklar close dan pada saat saklar open. Bila duty cycle diatur 0% maka saklar akan close (on) seperti pada gambar 38.b. PWM yang berasal dari mikro yang berupa logika low mengakibatkan transistor 2n2222 berada dalam posisi off, sehingga menyebabkan terdapat tegangan pada kaki basis MOSFET, BJT dan IGBT yang berasal dari supply sebesar 15v. Tegangan tersebutlah yang menyebabkan saklar akan close (on) dan selanjutnya arus hanya akan terus mengalir melalui R1.
terhubung ke ground dan menyebabkan tidak adanya supply tegangan di kaki basis sehingga saklar dapat dikatakan dalam keadaan off.
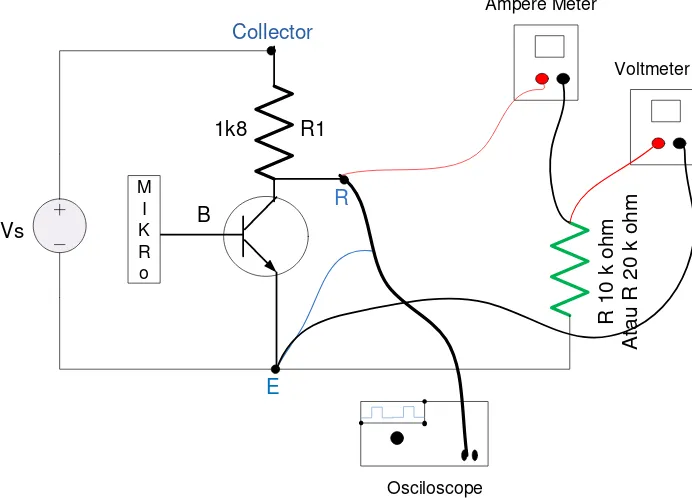
[image:61.595.136.482.164.413.2]Vs R1 1k8 B Collector E M I K R o R Osciloscope Voltmeter Ampere Meter R 1 0 k o h m At a u R 2 0 k o h m
Gambar 40. Mode Rangkaian Chopper Kelas A Pada Praktikum
Dalam pengujian ini titik ukur tegangan berada pada R2 (10k/20k), dan merupakan beban yang akan dikonversikan tegangannya. Nilai tegangan pada R2 saat saklar close ( ) adalah 0 (gambar 38.b) dan nilai tegangan saat saklar open ( ) adalah:
4-1
Setelah nilai tegangan pada R2 diperoleh, selanjutnya adalah mencari nilai tegangan sesuai dengan variasi % dutycycle (k).
Dimana,
4-3 Maka:
4-4
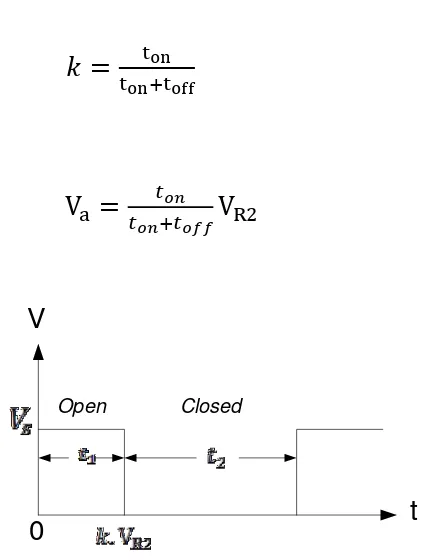
0
Closed Open
V
[image:62.595.219.434.91.371.2]t
Gambar 41. Bentuk Gelombang Keluaran Chopper Kelas A
Nilai arus pada saat saklar close adalah 0, Sedangkan nilai arus pada saat saklar open adalah.
4-5
Dalam hal ini akan terjadi kenaikan tegangan dari R 10kΩ ke R 20kΩ walaupun
tidak terlalu besar sekali. Sedangkan nilai arus yang didapatkan pada chopper kelas A ini adalah selalu bernilai positif karena arus terus mengalir dari power supply menuju beban (lihat gambar 38c).
Transistor), MOSFET (Metal-Oxide Semiconductor Field Efect Transistor) dan IGBT (Insulated Gate Bipolar Transistor).dihasilkan data sebagai berikut:
Tabel 1. Data hasil pengujian saat Vin = 40V dengan beban 10kΩ
Duty cycle
MOSFET IGBT BJT Perhitungan
[image:63.595.149.476.437.663.2]I (mA) Vout i(mA) Vout i(mA) Vout i(mA) Vout 0% 0.0 0.0 0.0 0.6 0.0 0.0 0.0 0.0 10% 0.3 2.8 0.6 6.2 0.0 0.0 0.3 3.4 20% 0.6 6.0 1.0 9.6 0.0 0.9 0.7 6.8 30% 1.0 9.5 1.3 13.0 0.4 4.2 1.0 10.0 40% 1.3 13.0 1.7 16.3 0.8 8.0 1.4 13.6 50% 1.7 16.4 2.0 19.8 1.2 12.0 1.7 17.0 60% 2.0 19.8 2.4 23.3 1.6 16.0 2.0 20.3 70% 2.4 23.4 2.7 27.0 2.0 20.7 2.4 23.7 80% 2.7 27.0 3.0 30.5 2.6 25.7 2.7 27.1 90% 3.0 30.4 3.4 33.6 3.2 31.3 3.0 30.5 100% 3.5 34.5 3.5 34.4 3.5 34.5 3.4 34.0
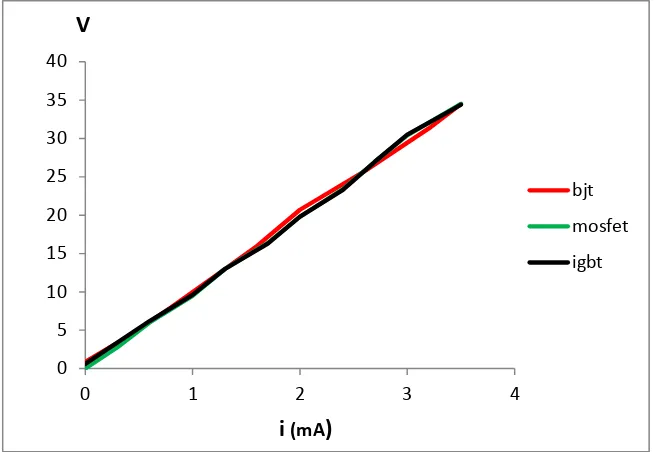
Gambar 42. Hubungan V-I BJT, MOSFET dan IGBT (kwd I)
dengan beban 10 kΩ dan V in 40 V
0 5 10 15 20 25 30 35 40
0 1 2 3 4
V
i (mA)
bjt
mosfet
Tabel 2. Data hasil pengujian saat Vin = 40V dengan beban 20kΩ
Duty cycle
MOSFET IGBT BJT Perhitungan
[image:64.595.147.477.353.565.2]I (mA) Vout i(mA) Vout i(mA) Vout i(mA) Vout 0% 0.0 0.0 0.0 0.6 0.0 0.0 0.0 0.0 10% 0.1 3.1 0.3 6.7 0.0 0.0 0.2 3.7 20% 0.3 6.7 0.5 10.4 0.0 1.1 0.4 7.3 30% 0.5 10.3 0.7 14.0 0.2 4.8 0.6 11.0 40% 0.7 14.0 0.9 18.0 0.5 8.9 0.7 14.7 50% 0.9 17.8 1.0 21.6 0.7 13.0 0.9 18.4 60% 1.0 21.5 1.3 25.5 0.9 17.5 1.1 22.0 70% 1.3 25.3 1.5 29.5 1.1 22.7 1.3 25.7 80% 1.5 29.0 1.7 33.5 1.4 28.2 1.5 29.4 90% 1.6 32.7 1.8 37.0 1.7 34.3 1.7 33.0 100% 1.9 37.4 1.9 38.0 1.9 37.5 1.8 36.7
Gambar 43. Hubungan V-I BJT, MOSFET dan IGBT (kwd I) dengan beban 20 kΩ dan V in 40 V
Dari tabel dan grafik diatas telah dibuktikan bahwa Chopper kelas A ini adalah chopper kuadran kesatu, artinya adalah tegangan dan arusnya selalu bernilai positif sehingga jika hubungan antara V-I digambar dalam satu kurva diagram cartesius akan jelas terlihat bahwa chopper kelas A ini akan selalu bekerja pada
0 5 10 15 20 25 30 35 40
0 0,5 1 1,5 2
V
i (mA)
bjt
mosfet
kuadran kesatu baik melalui pensaklaran dengan menggunakan BJT, MOSFET maupun IGBT (lihat gambar grafik diatas).
Gambar 44. Diagram Kerja Kuadran Kesatu
Pengambilan data arus dilakukan dengan menggunakan multimeter sanwa CD771 dan untuk pengukuran tegangan menggunakan multimeter sanwa CD800a.
[image:65.595.236.371.176.290.2]Dari data diatas juga didapatkan grafik perbandingan V out yang dihasilkan oleh BJT, MOSFET dan IGBT separti yang diperlihatkan pada gambar:
Gambar 45. Perbandingan V out BJT, MOSFET dan IGBT dengan Vin 40V dan R 10kΩ pada pengujian chopper Kelas A
0 5 10 15 20 25
0 10 20 30 40 50 60 70 80 90 100 110
V
duty cycle
k
CCa
BJT (V out)
MOSFET (V out)
IGBT (V out)
V perhitungan
Gambar 46. Perbandingan V out BJT, MOSFET dan IGBT dengan Vin 40V dan R 20kΩ pada pengujian chopper Kelas A
Dari grafik perbandingan masing-masing V-out terlihat bahwa nilai tegangan saat menggunakan IGBT lebih besar daripada tegangan perhitungannya, hal ini dikarenakan waktu turun pada sinyal gelombang yang dihasilkan IGBT lebih lama dibandingkan dengan waktu naik gelombangnya. Pada grafik perbandingan terlihat saat nilai k = 90% menghasilkan nilai V output yang hampir sama dengan nilai output saat k = 100%.
a.Mosfet b. IGBT c. BJT
Gambar 47. Bentuk Sinyal Gelombang Keluaran Mosfet, IGBT dan BJT Pada k=50%
0 5 10 15 20 25
0 10 20 30 40 50 60 70 80 90 100 110
V
duty cycle
k
CCa
BJT (V out)
MOSFET (V out)
IGBT (V out)
V perhitungan
Pada BJT saat diberikan nilai k = 0% sampai dengan k = 20% dengan V in 40 V
dan beban R = 10 kΩ nilai tegangan keluaran masih berada di titik nol. Selanjutnya ketika diatur nilai k = 40% sampai 50% tegangan keluaran sudah ada, walaupun masih belum sesuai dengan tegangan perhitungan. Ketika diatur nilai k dari 70% sampai 100% maka akan menghasilkan nilai V out yang hampir sama dengan V out perhitungan. Namun bila nilai V-in dinaikkan pada BJT ini akan menghasilkan V-out yang mendekati nilai V out perhitungannya jika dibandingkan saat di berikan tegangan input 40 V.
Berbeda dengan hasil pengujian IGBT dan BJT, pada MOSFET pada hasil pengujian yang didapatkan selalu menghasilkan tegangan V out yang hampir sama dengan V out perhitungannya. Hal ini dapat terlihat dari bentuk sinyal gelombang keluarannya, yaitu bentuk gelombang ketika naik dan turunnya sudah hampir sama (persegi). Data hasil pengujian selengkapnya dapat dilihat pada lampiran.
b. Chopper Kelas B
Sama seperti kelas A, kelas B ini juga dilakukan dengan memvariasikan pensaklarannya dengan menggunakan tiga jenis transistor yaitu, BJT, MOSFET dan IGBT. Pengujian ini dilakukan dengan memvariasikan tegangan input, % duty cycle dan beban.
R2
Vs SW
L R1
a. Rangkaian Chopper Kelas B
R2
Vs
10mH
L
R2
Vs
1k8
L
R1
10mH
16v
b). Rangkaian ekivalen c).Rangkaian ekivalen
[image:68.595.133.482.258.662.2]Saklar on = close Saklar off = open
Dengan memperhatikan gambar diatas, maka dapat dianalisa rangkaian dari chopper kelas B yang dapat dibagi menjadi 2 jenis rangkaian ekivalen yaitu pada saat saklar close (on) dan pada saat saklar open (off). Bila duty cycle diatur 0%, maka posisi saklar akan close seperti pada gambar 45.b. Sehingga arus akan mengalir dari power supply menuju L, R2 dan langsung ke ground. Maka nilai tegangan pada R2 adalah bernilai 0. Sedangkan saat duty cycle diatur 100%, maka saklar akan open seperti pada gambar 45.c, sehingga arus akan mengalir melalui L, R1 dan R2.
Dalam hal ini diasumsikan bahwa R2 adalah beban yang divariasikan dan akan dikonversikan tegangannya, tetapi nilai tegangan pada R2 adalah tidak sama dengan nilai tegangan pada titik ukur. Titik ukur tegangan dalam percobaan ini ada diantara titik R1 dan titik R2 (lihat gambar 46). Nilai frekuensi chopper yaitu sebesar 11.0892 kHz sedangkan nilai baterai dalam hal ini diberikan konstan yang bernilai 16V. Vs R1 1k8 Collector E R Osciloscope Voltmeter Ampere Meter G M I K R o
[image:69.595.162.457.507.724.2]R 10 k ohm Atau R 20 k ohm
Nilai tegangan pada R2 (10k/20k) saat saklar close ( ) adalah 0 (gambar 45.b), dan nilai tegangan pada R2 saat saklar terbuka ( ) adalah:
)
)
4-7
Untuk mendapatkan nilai tegangan pada R2, maka akan menggunakan rumus pembagi tegangan.
4-8
Dalam rangkaian ini nilai tegangan pada R2 adalah tidak sama dengan nilai tegangan pada titik ukur, maka untuk mencari nilai tegangan pada titik ukur yang sebenarnya yaitu dengan mengurangkan nilai tegangan power supply terlebih dahulu dengan tegangan pada .
)
4-90
Closed Open
V
t
Gambar 50. Bentuk Gelombang Keluaran Chopper Kelas B
4-10
Setelah nilai arus diperoleh, selanjutnya adalah mencari nilai arus sesuai dengan variasi % duty cycle.
)
4-11Nilai arus yang didapat pada saat saklar open/off ( ) adalah:
)
)
4-12
Setelah nilai arus pada R2 diperoleh, selanjutnya adalah mencari nilai arus sesuai dengan variasi % duty cycle.
4-13
Sebelum lanjut lebih dalam lagi, satu hal yang perlu disepakati untuk mempermudah penghitungan adalah bahwasanya ketika duty cycle diatur 100%, artinya adalah 100% on + 0% off . Begitu juga jika diatur 30%, artinya adalah 30% on + 70% off. Maka Untuk mendapatkan nilai arusnya adalah dengan menjumlahkan besarnya nilai arus pada saat dengan nilai arus pada saat .
4-14
Transistor), MOSFET (Metal-Oxide Semiconductor Field Efect Transistor) dan IGBT (Insulated Gate Bipolar Transistor).dihasilkan data sebagai berikut:
Tabel 3. Data hasil pengujian saat Vin = 40V dengan beban 10kΩ
Duty cycle
MOSFET IGBT BJT Perhitungan
I (mA) Vout i(mA) Vout i(mA) Vout i(mA) Vout 0% -4.0 0.0 -4.0 0.5 -4.0 0.0 -4.0 0.0 10% -3.9 0.9 -3.7 3.5 -4.0 0.0 -3.8 2.0 20% -3.8 2.3 -3.5 5.6 -4.0 0.0 -3.6 4.0 30% -3.6 3.8 -3.3 7.9 -4.0 0.0 -3.4 6.0 40% -3.5 5.4 -3.0 10.2 -4.0 0.0 -3.2 8.1 50% -3.3 7.0 -2.8 12.6 -4.0 0.0 -3.0 10.1 60% -3.0 8.9 -2.6 15.0 -4.0 0.0 -2.8 12.1 70% -2.9 11.0 -2.3 17.6 -3.9 2.1 -2.6 14.2 80% -2.7 13.4 -2.0 20.5 -3.4 6.8 -2.4 16.2 90% -2.4 15.9 -1.7 23.4 -2.5 16.2 -2.2 18.2 100% -2.0 19.8 -1.6 24.0 -1.7 24.0 -2.0 20.3
Gambar 51. Hubungan V-I BJT, MOSFET dan IGBT (kwd II) dengan beban 10 kΩ dan V in 40 V
0 5 10 15 20 25 30
-5 -4 -3 -2 -1 0
V
i (mA)
bjt
Tabel 4. Data hasil pengujian saat Vin = 40V dengan beban 20kΩ
Duty cycle
MOSFET IGBT BJT Perhitungan
I (mA) Vout i(mA) Vout i(mA) Vout i(mA) Vout 0% -2.0 0.0 -2.0 0.5 -2.0 0.0 -2.0 0.0 10% -2.0 0.6 -1.9 2.0 -2.0 0.0 -1.9 1.9 20% -1.9 1.7 -1.8 4.2 -2.0 0.0 -1.8 3.7 30% -1.9 3.0 -1.7 6.2 -2.0 0.0 -1.7 5.6 40% -1.8 4.2 -1.6 8.2 -2.0 0.0 -1.6 7.5 50% -1.7 5.6 -1.5 10.3 -2.0 0.0 -1.5 9.3 60% -1.7 7.2 -1.4 12.5 -2.0 0.0 -1.4 11.2 70% -1.6 9.0 -1.3 14.7 -2.0 0.0 -1.3 13.0 80% -1.5 10.9 -1.2 17.3 -1.9 1.1 -1.2 14.9 90% -1.4 13.2 -1.1 20.6 -1.6 9.3 -1.1 16.7 100% -1.2 16.8 -1.0 21.5 -1.0 22.0 -1.0 18.6
Gambar 52. Hubungan V-I BJT, MOSFET dan IGBT (kwd II) dengan beban 20 kΩ dan V in 40 V
Dari tabel diatas dapat dilihat Nilai tegangan keluaran pada chopper kelas B ini selalu positiv, sedangkan nilai arus yang didapatkan adalah selalu bernilai negatif, hal ini disebabkan karena masing –masing arus pada saat off maupun pada saat on bernilai negativ (lihat gambar 45.c). Dalam hal ini akan terjadi penurunan tegangan dari R 10k ke R 20k walaupun tidak terlalu besar sekali.
0 5 10 15 20 25
-2,5 -2 -1,5 -1 -0,5 0
V
i (mA)
bjt
Dari tabel pengujian dan grafik diatas, telah dibuktikan bahwa chopper kelas B ini disebut juga sebagai chopper kuadran kesatu, tetapi bekerja pada kuadran kedua yang artinya adalah tegangan selalu bernilai positif sedangkan nilai arusnya selalu bernilai negatif sehingga jika melihat hubungan antar V-I seperti dalam diagram cartesius diatas maka akan terlihat jelas bahwasanya chopper kelas B ini akan selalu bekerja pada kuadran II (lihat grafik a dan b) baik melalui pensaklaran dengan menggunakan BJT, MOSFET maupun IGBT. Dengan melihat sistem kerja dari chopper kelas B ini, maka chopper kelas B ini sering digunakan sebagai inverter dan sebagai regenerative braking pada motor.
i
[image:74.595.259.395.351.507.2]V
Gambar 53. Diagram kerja Kuadran kedua
Gambar 54. Perbandingan V out BJT, MOSFET dan IGBT dengan Vin 40V dan R 10k pada pengujian chopper Kelas B
Gambar 55. Perbandingan V out BJT, MOSFET dan IGBT dengan Vin 40V dan R 20k pada pengujian chopper Kelas B
Dari grafik perbandingan tegangan output terlihat untuk IGBT sendiri, pensaklarannya cenderung sudah stabil namun nilai tegangan keluaran yang dihasilkannya selalu berada diatas dari nilai tegangan perhitungan, hal ini dikarenakan waktu on yang dihasilkan IGBT lebih lama dibandingkan dengan nilai pengaturannya. Pada grafik perbandingan terlihat saat nilai k = 90%
0 5 10 15 20 25
0 10 20 30 40 50 60 70 80 90 100 110
V
duty cycle
k
CCa
BJT (V out)
MOSFET (V out)
IGBT (V out)
V perhitungan
(%)
0 5 10 15 20 250 10 20 30 40 50 60 70 80 90 100 110
V
duty cycle
k
CCa
BJT (V out)
MOSFET (V out)
IGBT (V out)
V perhitungan
[image:75.595.138.488.351.562.2]menghasilkan nilai V output yang hampir sama dengan nilai output saat k = 100%. Gambar gelombang keseluruhan hasil dari pengujian kelas b dapat dilihat dalam lampiran.
a.Mosfet b. IGBT c. BJT
Gambar 56. Bentuk Sinyal Gelombang Keluaran Mosfet, IGBT dan BJT Pada k=80%
Pada BJT saat diberikan nilai k = 0% sampai 70% dengan V in 40 V dan beban R
yang hampir sama dengan V out perhitungan. Data hasil pengujian selengkapnya dapat dilihat pada lampiran.
c. Kelas C
Sama seperti kelas B, kelas C ini juga dilakukan dengan memvariasikan pensaklarannya dengan menggunakan tiga jenis transistor yaitu, BJT, MOSFET dan IGBT. Pengujian ini dilakukan dengan memvariasikan tegangan input, % duty cycle dan beban.
Vs L R2 E S1 S2 d1 d2 R1 1,8k
a). Rangkaian Kelas C
Vs L R2 E S1 d2 R1 1,8k Vs L R2 E S2 d1 d2 R1 1,8k
b). Rangkaian ekivalen c).Rangkaian ekivalen
[image:77.595.141.493.332.697.2]Saklar 1 close Saklar 2 open
Dengan memperhatikan gambar diatas, maka dapat dianalisa rangkaian dari chopper kelas C yang dapat dibagi menjadi 2 jenis rangkaian ekivalen yaitu pada saat saklar 1 close = saklar 2 open dan pada saat saklar 2 close = saklar 1 open. Bila S1 close dan S2 akan open, maka arus akan mengalir dari power supply melewati R1, S1 dan langsung menuju sumber baterai. Dengan demikian nilai arus adalah positiv. Sedangkan saat S1 open dan S2 close maka tegangan dari power supply akan di block oleh diode 1, Sehingga arus akan akan mengalir dari sumber baterai menuju L, R2 dan langsung ke ground. Dengan demikian nilai arusnya adalah negativ.
B G 15 V Vs Mikro Ke rangkaian 2n2222 B G 15 V V source Mikro Ke rangkaian 2n2222
a). Rangkaian penguat b).Rangkaian penguat
[image:79.595.122.516.86.355.2]Saklar 1 Saklar 2
Gambar 58. Contoh Rangkaian Penguat Chopper Kelas C
L R2 1k8 G Drain S M I K R o G M I K R o
R 10k atau R 20k Osciloscope Voltmeter Ampere Meter S R E Vs R1 D1 D2 Mosfet 2 Mosfet 1
[image:79.595.140.482.443.665.2]L R2 1k8 G Drain S M I K R o
R 10k atau R 20k Osciloscope Voltmeter Ampere Meter S E Vs R1 D2 Mosfet 1 14 V 10 V L R2 S G
R 10k atau R 20k Osciloscope Voltmeter Ampere Meter R E D2
Mosfet 2 10 V
b). Rangkaian ekivalen c).Rangkaian ekivalen
Saklar 1 close Saklar 2 open
Gambar 60. Rangkaian Ekivalen Chopper Kelas C Pada Mosfet
Dengan memperhatikan gambar 55 dan gambar 56, maka proses kerja chopper kelas C dapat dianalisa sebagai berikut. Ketika diberikan dutycycle 0% (gambar 55 a), keluaran yang terjadi dari mikro adalah logika low sehingga tidak terdapat tegangan pada transistor 2n2222. Maka arus akan mengalir dari sumber tegangan 15 V menuju kaki G mosfet dan secara otomatis akan terdapat nilai tegangan pada kaki sourcenya yang langsung terhubung kerangkaian selanjutnya. Dengan kata lain apabila dutycycle diatur 0%, maka saklar 1 akan on, saklar 2 akan off dan terdapat nilai tegangan pada rangkaian.
pada kaki G mosfet. Karena tidak terdapat tegangan pada kaki G, maka menyebabkan saklar off dan secara otomatis maka saklar 2 akan on.
Nilai tegangan pada R2 saat saklar 1 close adalah 15 V (gambar 54 b), hal ini di peroleh dari pengukuran voltmeter yang dilakukan pada keluaran kaki source (emitor). Nilai tegangan pada kaki gate mosfet sebesar 14 V sehingga nilai tegangan pada kaki sourcenya sebesar kurang lebih 15 V. Sedangkan nilai tegangan pada R2 saat saklar 2 close adalah 0 karena arus yang berasal dari baterai langsung menuju ground.
)
4-15Sedangkan untuk mendapatkan nilai arus, tetap melihat 2 jenis rangkaian ekivalen diatas. Nilai arus yang didapat pada saat saklar 1 close (on) adalah:
4-16
Setelah nilai arus diperoleh, selanjutnya adalah mencari nilai arus sesuai dengan variasi % duty cycle.
)
4-17
Untuk mendapatkan nilai arus yang didapat pada saat saklar 2 close (on) adalah:
Setelah nilai arus diperoleh, selanjutnya adalah mencari nilai arus sesuai dengan variasi % duty cycle.
4-19
Maka Untuk mendapatkan nilai arus totalnya adalah dengan menjumlahkan besarnya nilai arus pada saat dengan nilai arus pada saat .
4-20
Signal gelombang dari chopper kelas C ini sendiri akan cenderung seperti prinsip kerja dari saklar 2 sendiri yaitu berkebalikan dengan saklar 1, hal ini disebabkan oleh rangkain penguat dari saklar 1 dan kaki sourcenya yang tidak langsung dihubungkan ke ground tetapi menuju rangkaian kaki collector saklar 2.
Agar chopper kelas C ini dapat bekerja maka, dalam percobaan kelas C ini dipastikan agar saklar satu dengan saklar dua tidak bekerja secara bersamaan. Sehingga cara yang digunakan adalah dengan mengatur signal gelombang masing-masing saklar melalui program mikrokontroler agar saling berkebalikan (invert).
1k8 G Drain S M I K R o G M I K R o Osciloscope S Vs R1 Mosfet 2 Mosfet 1 R R
Ketika dilakukan teknik melihat signal gelombang dengan dual channel seperti gambar diatas dengan menggunkan osiloskop biasa, ternyata salah satu satu dari saklar tersebut seperti tidak berfungsi (berupa garis lurus). Hal ini tentu saja bisa terjadi, dengan melihat gambar diatas lebih cermat lagi. Pada gambar diatas
perhubungan antara titik “S” saklar 1 dengan titik “R”saklar 2 dihubungkan ke
ground osiloskop, begitu juga titik “S” pada saklar 2 dihubungkan dengan ground
yang sudah terhubung juga dengan ground power supply. Pada kenyataanya, ground pada masing-masing osiloskop adalah saling terhubung, dengan demikian
secara tidak langsung titik “S” pada saklar 1 sudah langsung terhubung dengan
ground sehingga arus yang mengalir dari titik “R” saklar 1 akan selalu menuju ground ketika saklar 1 on. Tentunya hal ini tidak diinginkan, karena yang
diharapkan seharus nya arus mengalir dari titik “S” saklar 1 menuju ke titik “R”
saklar 2.
Solusi yang diambil untuk mengetahui signal gelombang masing-masing saklar adalah dengan menggunakan single channel yang dilakukan secara bergantian ataupun dengan menggunakan dua buah osciloscope.
1k8 G Drain S M I K R o G M I K R o Osciloscope S Vs R1 Mosfet 2 Mosfet 1 R R Osciloscope
Dari percobaan gambar diatas maka diperoleh salah satu contoh signal gelombang saklar 1 dan saklar 2.
Gambar 63. Signal Gelombang saklar 1 dan saklar 2 (40%)
Dari gambar diatas maka dapat terlihat dengan jelas bahwa saklar 1 dan saklar 2 adalah aktif dan saling berkebalikan. Kondisi diatas merupakan kondisi ketika diberikan dutycycle 40%, sehingga saklar 2 akan otomatis menjadi 60%.
a.Mosfet b. IGBT c. BJT
Tabel 5. Data hasil pengujian saat Vin = 40V dengan beban 10kΩ
Duty cycle
MOSFET IGBT BJT
[image:85.595.148.476.352.579.2]I (mA) Vout i(mA) Vout i(mA) Vout 0% 0.5 14.7 0.03 10.2 0.3 12.8 10% 0.3 13.2 0.02 10.2 0.11 11.0 20% 0.2 11.7 -0.07 9.0 0.04 10.3 30% 0.0 10.2 -0.2 8.0 0.02 10.0 40% -0.1 8.7 -0.3 7.0 0.01 9.9 50% -0.3 7.2 -0.4 6.1 -0.2 7.4 60% -0.4 5.8 -0.5 5.1 -0.6 3.8 70% -0.5 4.3 -0.6 4.1 -0.9 0.4 80% -0.7 2.8 -0.7 3.2 -1.0 0.1 90% -0.8 1.3 -0.8 2.3 -1.0 0.0 100% -1.0 0 -0.9 0.5 -1.0 0.0
Gambar 65. Hubungan V-I BJT, MOSFET dan IGBT (kwd I&II) dengan beban 10 kΩ dan V in 40 V
0 2 4 6 8 10 12 14 16
-1,5 -1 -0,5 0 0,5 1
V
i (mA)
bjt
Tabel 6. Data hasil pengujian saat Vin = 40V dengan beban 20kΩ
Duty cycle
MOSFET IGBT BJT
I (mA) Vout i(mA) Vout i(mA) Vout 0% 0.24 14.8 0.2 10.2 0.15 12.8 10% 0.16 13.3 0.1 10.2 0.10 11.0 20% 0.09 11.8 -0.03 9.0 0.09 10.3 30% 0.02 10.3 -0.08 8.0 0.08 10.0 40% -0.05 8.8 -0.13 7.0 0.06 9.9 50% -0.12 7.3 -0.18 6.1 -0.09 7.4 60% -0.19 5.8 -0.23 5.1 -0.30 3.8 70% -0.27 4.3 -0.27 4.1 -0.47 0.4 80% -0.34 2.9 -0.33 3.2 -0.48 0.1 90% -0.42 1.4 -0.37 2.3 -0.48 0.0 100% -0.49 0 -0.46 0.5 -0.48 0.0
Gambar 66. Hubungan V-I BJT, MOSFET dan IGBT (kwd I&II) dengan beban 20 kΩ dan V in 40 V
Dari tabel pengujian dan grafik diatas, telah dibuktikan bahwa chopper kelas C akan bekerja pada kuadran I&II. Chopper kelas C adalah gabungan dari chopper A dan chopper kelas B. Hal ini dapat dilihat dari tegangan keluaran dan arus keluarannya, yaitu tegangan selalu bernilai positif sedangkan nilai arusnya dapat bernilai negativ atau positif. Sehingga jika hubungan antar V-I digambar seperti
0 2 4 6 8 10 12 14 16
-0,6 -0,4 -0,2 0 0,2 0,4
V
i (mA)
bjt
mosfet
grafik diatas maka akan terlihat jelas bahwasanya chopper kelas C ini akan selalu bekerja pada kuadran I&II baik melalui pensaklaran dengan menggunakan BJT, MOSFET maupun IGBT.. Dengan melihat sistem kerja dari chopper kelas C ini, maka chopper kelas C ini sering digunakan sebagai inverter dan sebagai regenerative braking pada motor.
[image:87.595.229.355.227.370.2]i
V
Gambar 67. Diagram kerja Kuadran I&II
[image:87.595.139.486.503.711.2]Dari data diatas juga didapatkan grafik perbandingan V out yang dihasilkan oleh BJT, MOSFET dan IGBT seperti yang diperlihatkan pada gambar:
Gambar 68. Perbandingan V out BJT, MOSFET dan IGBT dengan Vin 40V dan R 10k pada pengujian chopper Kelas C
0 2 4 6 8 10 12 14 16
0 10 20 30 40 50 60 70 80 90 100 110
V
duty cycle
k
CCa
BJT (V out)
MOSFET (V out)
IGBT (V out)
Gambar 69. Perbandingan V out BJT, MOSFET dan IGBT dengan Vin 40V dan R 20k pada pengujian chopper Kelas C
Dari grafik perbandingan masing-masing tegangan output terlihat bahwa nilai tegangan saat menggunakan MOSFET lebih stabil dan konstan. Pada BJT sendiri terlihat bahwa tegangan keluaran yang dihasilkannya tidak stabil dan cenderung tidak beraturan (berbentuk zigzag). Berbeda dengan hasil pengujian IGBT yang V out yang dihasilkannya ataupun Interval kenaikan tegangannya akan terlihat cenderung lebih stabil ketika diberikan variasi duty cyle dari nilai k = 0 sampai seterusnya.
0 2 4 6 8 10 12 14 16
0 10 20 30 40 50 60 70 80 90 100 110
V
duty cycle
k
CCa
BJT (V out)
MOSFET (V out)
IGBT (V out)
Motto
Hendaklah engkau berkelakuan sesuai dengan firman Allah
yang engkau pelajari, sebab itulah kehidupan bagimu
“Janganlah hendaknya kamu khawatir tentang apapun juga, tetapi
nyatakanlah dalam segala hal keinginanmu kepada Allah dalam Doa dan
permohonan dengan ucapan syukur”
Filipi 4:6
“
Sai burju ma ho rasirasa mate, dung I lehononku ma tu ho tumpal hangoluon
I”
RIWAYAT HIDUP
Penulis dilahirkan di desa Tanjung Harapan, Kabupaten Labuhan Batu, Provinsi Sumatera Utara pada tanggal 10 September 1986. Terlahir sebagai anak kelima dari tujuh bersaudara, dari pasangan Bapak St.R.Manullang dan Ibu T.br.Sitanggang.
Pendidikan penulis dimulai dari Sekolah Dasar Negeri No 117876 Cikampak pada tahun 1993 dan selesai pada tahun 1999, Kemudian Sekolah Lanjutan Tingkat Pertama di SLTP Budaya Cikampak diselesaikan pada tahun 2002, dan Sekolah Menengah Umum di SMU RK Bintang Timur Rantauprapat yang diselesaikan pada tahun 2005.
Penulis terdaftar sebagai mahasiswa Jurusan Teknik Elektro Fakultas Teknik Universitas Lampung pada tahun 2005 melalui Seleksi Penerimaan Mahasiswa Baru (SPMB). Selama menjadi mahasiswa penulis pernah menjabat sebagai pengurus Unit Kegiatan Mahasiswa Kristen Universitas Lampung (UKM-K) selama 2 periode yaitu pada tahun 2006/2007 dan 2007/2008 . Dalam organisasi kemahasiswaan, penulis juga masuk kedalam Himpunan Mahasiswa Teknik Elektro (Himatro) sebagai anggota Departemen Kerohanian. Pada tahun 2008 penulis melaksanakan Kerja Praktik di PT.PLN Gardu Induk Teluk Betung
dengan membahas ” Sistem Proteksi Arus Lebih Pada Transformator Daya 60 MVA Dengan Menggunakan Netral Grounding Resistor (NGR)”.
Soal pretest
Contoh soal:
Sebuah klasifikasi dc chopper kelas A, memiliki beban R2 sebesar 10kΩ dan
diberikan tegangan input sebesar 20V.Tentukan:
a. Tegangan keluaran ( ) dan arusnya ( ), ketika dutycycle (k) diatur sebesar 60%
b. Tegangan keluaran ( ) dan arusnya ( ), ketika dutycycle diatur sebesar 60%, jika (R2 sebesar 20k)