ANALISIS SENSITIVITAS PADA PERSOALAN TRANSPORTASI
DENGAN PENDEKATAN DIFERENSIAL KALKULUS
SKRIPSI
GUSTRI L HUTAPEA
050803013
DEPARTEMEN MATEMATIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SUMATERA UTARA
ANALISIS SENSITIVITAS PADA PERSOALAN TRANSPORTASI DENGAN PENDEKATAN DIFERENSIAL KALKULUS
SKRIPSI
Diajukan untuk melengkapi tugas dan memenuhi syarat mencapai gelar Sarjana Sains
GUSTRI L HUTAPEA 050803013
DEPARTEMEN MATEMATIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
PERSETUJUAN
Judul : ANALISIS SENSITIVITAS PADA PERSOALAN
TRANSPORTASI DENGAN PENDEKATAN DIFERENSIAL KALKULUS
Kategori : SKRIPSI
Nama : GUSTRI L HUTAPEA
Nomor Induk Mahasiswa : 050803013
Program Studi : SARJANA (S-1) MATEMATIKA
Diluluskan di
Medan, Desember 2009
Komisi Pembimbing:
Pembimbing I Pembimbing II
Drs. Faigiziduhu Bu’ulolo, M. Si Drs. Suwarno Ariswoyo, M.Si NIP. 19531218 198003 1 003 NIP. 19500321 198003 1 001
Diketahui/Disetujui oleh:
Departemen Matematika FMIPA USU
Dr. Saib Suwilo, M.Sc
NIP. 19640109 198803 1 004
PERNYATAAN
ANALISIS SENSITIVITAS PADA PERSOALAN TRANSPORTASI
DENGAN PENDEKATAN DIFERENSIAL
KALKULUS
SKRIPSI
Saya mengakui bahwa Skripsi ini adalah hasil karya saya sendiri, kecuali beberapa
kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan, Desember 2009
Gustri L. Hutapea
PENGHARGAAN
Segala puji dan syukur penulis panjatkan ke hadirat Tuhan Yang Maha Esa atas kasih
serta segala berkat dan anugrah-Nya yang senantiasa dilimpahkanNya hingga skripsi
ini pun dapat terselesaikan dengan baik.
Demikian, penulis juga menyadari keterlibatan berbagai pihak yang telah
membantu demi terselesaikannya skripsi ini. Oleh karena itu terima kasih penulis
ucapkan kepada:
1. Bapak Drs. Faiguzuduhu Bu’ulolo, M.Si dan Bapak Drs. Suwarno Ariswoyo,
M.Si selaku dosen pembimbing I dan II yang telah memberikan bimbingan
dalam penulisan skripsi ini.
2. Bapak Drs. Henry Rani Sitepu, M.Si dan Ibu Dra. Elly Rosmaini, M.Si selaku
komisi penguji atas segala masukan yang telah diberikan.
3. Bapak Dr. Saib Suwilo, M.Sc selaku ketua jurusan departemen matematika
FMIPA USU
4. Bapak Prof. Dr. Eddy Marlyanto, M.Sc selaku Dekan FMIPA USU
5. Ayahanda, J. Hutapea, dan Ibunda, M. Tambunan, yang saya kasihi atas doa
dan segala dukungan moril dan materiil yang telah diberikan.
6. Saudara-saudara saya, Erni S. Hutapea, Roger P. Hutapea, Ester Hutapea, Eda
Marlina Butar-butar, Tante Frida Tambunan atas doa dan dukungannya.
7. Teman-teman Matematika st’05 terutama Heryanto Sembiring atas bantuannya
8. Teman-teman satu kost Bahagia: K’ Reni, Maya, K’ Nelly, Tiara, K’ Juni dan
Evi atas pengertian dan dukungan doanya.
Penulis juga menyadari masih banyak kekurangan dalam skripsi ini, baik dalam
teori maupun penulisannya, karena itu penulis mengharapkan saran dari pembaca
demi perbaikan bagi penulis.
Akhir kata, kiranya skripsi ini dapat bermanfaat bagi pihak pembaca.
Hormat saya,
ABSTRAK
ABSTRACT
The balanced relation between supply and demand in transportation problem makes it difficult to use traditional sensitivity analysis methods. Because, in the process of changing supply or demand, at least one more supply or demand needs to be changed to make the balance relation possible. In this paper, gived a method utilizing the concept of complete differential for sensitivity analysis of righthand-side parameter in transportation problem. This method examines the changes relation of supply and demand without making any change in the basic optimal. This method use Arsham and Kahn’s simplex algorithm to obtain basic invers matrix that will used for sensitivity analysis.
DAFTAR ISI
Halaman
Persetujuan ii
Pernyataan iii
Penghargaan iv
Abstrak vi
Abstract vii
Daftar Isi viii
Daftar Tabel x
Bab 1 Pendahuluan 1
1.1 Latar Belakang 1
1.2 Perumusan Masalah 2
1.3 Pembatasan Masalah 2
1.4 Tujuan Penelitian 2
1.5 Manfaat Penelitian 2
1.6 Metodologi Penelitian 3
1.7 Tinjauan Pustaka 3
Bab 2 Landasan Teori 5
2.1 Persoalan Transportasi 6
2.2 Model Persoalan Transportasi 6
2.2.1 Definisi Model Transportasi 6
2.2.2 Model Matematika 7
2.3 Total Unimodularitas dari Matriks Transportasi 10
2.4 Karakteristik Persoalan Transportasi 11
2.5 Solusi Persoalan Transportasi
2.5.1 Tahapan Penyelesaian Persoalan Transportasi 13
2.5.2 Algoritma Arsham-Kahn
2.5.3 Eliminasi Gauss-Jourdan 18
2.5.4 Penghitungan Matriks B-1 19
Bab 3 Pembahasan 26
3.1 Penghitungan Solusi Optimal 26
3.2 Analisis Sensitivitas 37
Bab 4 Kesimpulan Dan Saran 43
4.1 Kesimpulan 43
4.2 Saran 44
Daftar Pustaka 45
Lampiran 46
DAFTAR TABEL
TABEL Halaman
Tabel 2.1 Tabel Persoalan Transportasi 13
Tabel 3.1 Persoalan Transportasi 25
Tabel 3.2 Matriks Tereduksi Baris 26
Tabel 3.3 Matriks Tereduksi 26
Tabel 3.4 Tabel Simpleks Sementara 29
Tabel 3.5 Tabel Simpleks Awal 29
Tabel 3.6 Tabel Simpleks Tereduksi 30
Tabel 3.9 Tabel Utama (Tidak Fisibel) 31
Tabel 3.14 Tabel Optimal 34
BAB 1
PENDAHULUAN
1.1. Latar Belakang
Analisis sensitivitas merupakan analisis yang dilakukan pada solusi optimal suatu
persoalan program linear karena adanya perubahan diskrit parameter untuk melihat
berapa besar perubahan dapat ditolerir sebelum solusi optimal mulai kehilangan
optimalitasnya. Program linear merupakan suatu metode penyelesaian untuk
memperoleh solusi optimal (maksimum/minimum) dari suatu persoalan. Salah satu
tipe khusus dari persoalan program linear adalah persoalan transportasi.
Tipe khusus persoalan transportasi terletak pada beberapa karakter utamanya,
diantaranya bahwa persoalan transportasi cenderung membutuhkan sejumlah
pembatas dan variabel yang sangat banyak sehingga penyelesaiannya dengan
menggunakan metode simpleks biasa atau menggunakan komput er menjadi tidak
efektif karena membutuhkan banyak penghitungan atau mungkin dalam
penghitungannya akan menghadapi berbagai hambatan. Karakteristik yang lain adalah
adanya hubungan keseimbangan pembatas yakni antara total supply dan total demand. Hal ini mengakibatkan sulitnya melakukan analisis sensitivitas dengan menggunakan
metode biasa. Kesulitan ini disebabkan karena dalam proses pengubahan sumber
supply atau demand, satu atau lebih sumber harus diubah untuk mempertahankan kondisi keseimbangan ini. Karena itu pada tulisan ini analisis sensitivitas dilakukan
dengan menggunakan metode baru yakni dengan pendekatan diferensial lengkap
kalkulus.
Metode Stepping-stone merupakan salah satu metode yang cukup efektif untuk menyelesaikan persoalan transportasi karena pada metode penyelesaian ini tidak perlu
ditambahkan variabel artifisial atau variabel surplus/slack. Namun, informasi tabel
akhir yang diperoleh dari algoritma ini tidak cukup untuk melakukan analisis
Algoritma Arsham dan Kahn (yang selanjutnya disebut algoritma
Arsham-Kahn) menyelesaiakan persoalan ini dengan baik. Dalam algoritma ini diberikan
algoritma simpleks sederhana untuk menyelesaikan persoalan tanpa adanya
penambahan variabel. Adapun informasi mengenai matriks invers basis dapat
diperoleh dengan sedikit tambahan penghitungan, sehingga dengan menggunakan
metode penyelesaian ini selanjutnya dapat dilakukan analisis sensitivitas.
1.2. Perumusan Masalah
Perubahan nilai parameter pada solusi optimal dapat menyebabkan perubahan pada
basis optimal yang telah diperoleh sehingga permasalahan yang muncul adalah
menentukan berapa batasan maksimum perubahan nilai parameter yang tidak
mengubah basis optimal.
1.3. Pembatasan Masalah
Berdasarkan sifat keseimbangan persoalan transportasi maka persoalan dibatasi hanya
untuk perubahan nilai parameter ruas kanan pembatas.
1.4. Tujuan Penelitian
Tujuan dari penelitian ini adalah untuk mengetahui pengaruh yang terjadi karena
adanya perubahan nilai parameter pada solusi optimal dan menentukan batasan
maksimum perubahan nilai ruas kanan persoalan transportasi.
1.5. Manfaat Penelitian
Manfaat dari penelitian ini diantaranya dapat menambah pengetahuan bagi penulis
serta dapat menambah wawasan dan literatur dalam bidang operasi riset terutama yang
1.6. Metodologi Penelitian
Penelitian ini bersifat studi literatur. Adapun bahan-bahan yang mendukung diperoleh
dari berbagai sumber seperti buku, jurnal, dan bahan bacaan lain yang berhubungan
dengan masalah yang dibahas diatas.
Penelitian ini terdiri dari beberapa tahapan:
Tahap 1 : Mempelajari model dan persoalan transportasi dan karakteristiknya
Tahap : Menjelaskan dan menguraikan metode penyelesaian yakni algoritma
Arsham-Kahn
Tahap 3 : Menurunkan rumus pendekatan differensial kalkulus untuk analisis
sensitivitas
Tahap 4 : Implementasi dengan menggunakan contoh
Tahap 5 : Kesimpulan.
1.7. Tinjauan Pustaka
Buku “Program Linear dan variasinya”, B.D. Nasendi, 1985. Pada buku ini dijelaskan asumsi-asumsi dasar yang berhubungan dengan model umum persoalan
transportasi.
(1) Bahwa suatu produk yang ingin diangkut tersedia dalam jumlah yang tetap dan
diketahui.
(2) Bahwa produk tersebut akan dikirim melalui jaringan transportasi yang ada
dengan memakai cara pengangkutan tertentu dari pusat-pusat pengadaan ke
pusat-pusat permintaan.
(3) Bahwa jumlah permintaan di pusat permintaan juga diketahui dalam jumlah
tertentu dan tetap.
(4) Bahwa ongkos angkutan perunit produk yang diangkut juga diketahui,
sehingga tujuan untuk meminimumkan biaya total angkutan dapat tercapai.
Buku “Operations Research An Introduction”, Hamdy A. Taha, eighth edition, 2007. Tujuan dari persoalan transportasi adalah untuk menentukan rencana pengangkutan yang akan meminimumkan biaya total angkutan dan memenuhi batasan
supply dan demand.
Jurnal“Sensitivity Analysis of Righthand-Side Parameter in transportation Problems”, S. Doutsdargholi et al, 2009. Dalam jurnal ini diberikan sebuah pendekatan baru analisis sensitivitas pada ruas kanan pembatas persoalan transportasi.
Pendekatan yang dimaksud dengan menggunakan konsep diferensial kalkulus.
Perubahan nilai sisi kanan dilakukan secara simultan dan diperoleh nilai batasan
perubahan yang tidak mengubah solusi basis.
Jurnal “A Simplex-type Algorithm for General Transportation Problem: An Alternative to Stepping-stone, H. Arsham & A. B. Kahn, 1989. Jurnal ini memberikan pendekatan penyelesaian persoalan transportasi dalam bentuk tabel simpleks
BAB II
LANDASAN TEORI
Persoalan utama yang dihadapi oleh seorang manajer atau pengambil keputusan
adalah bagaimana mengalokasikan suatu sumber yang terbatas diantara berbagai
aktivitas atau proyek.
Program linear adalah suatu metode yang dapat digunakan dalam menentukan
alokasi sumber dengan cara yang optimal. Metode ini adalah suatu alat yang
digunakan secara luas dalam penelitian operasi dan telah banyak membantu dalam
membuat keputusan pada sebagian besar industri manufaktur dan dalam bidang
finansial atau organisasi pelayanan.
Dalam istilah program linear, kata program berarti program matematis. Dalam
konteks ini artinya proses perencanaan yang mengalokasikan sumber; tenaga kerja,
materi, mesin atau modal dengan kemungkinan cara yang terbaik (optimal) sehingga
biaya diminimumkan atau keuntungan dimaksimumkan. Dalam program linear
sumber ini dikenal sebagai variabel keputusan. Kriteria dalam memilih nilai terbaik dari variabel keputusan (seperti maksimumkan keuntungan atau minimumkan biaya)
dikenal sebagai himpunan konstrain.
Kata linear menunjukkan bahwa kriteria dalam memilih nilai terbaik pada
variabel keputusan dapat digambarkan oleh fungsi linear dari variabel-variabel ini;
yakni fungsi aljabarnya hanya mengandung pangkat pertama variabel dengan tidak
ada hasil perkalian. Sebagai contoh; 23x1dan 4x2 merupakan variabel keputusan yang
Sebagai tambahan untuk syarat linear, ditetapkan batasan non-negatif yang
berarti variabel tidak boleh berharga negatif. Sehingga tidak mungkin diperoleh
sumber yang negatif.
2.1. Persoalan Transportasi
Persoalan tranportasi merupakan suatu persoalan yang membahas masalah
pendistribusian suatu komoditi atau produk dari sejumlah sumber (supply) ke sejumlah tujuan (demand) dengan tujuan meminimumkan ongkos pengangkutan yang terjadi. Suatu persoalan transportasi memiliki model sebagai berikut.
2.2. Model Persoalan Transportasi
Persoalan umum transportasi dapat dinyatakan dalam representasi jaringan berikut:
S1 (Cij, Xij) D1
S2 D2
. .
. .
Sm . . Dn
Gambar Representasi Jaringan Model Persoalan Transportasi
2.2.1. Definisi Model Tsransportasi
Berdasarkan gambar diketahui bahwa terdapat m sumber dan n tujuan, masing-masing
dinyatakan oleh sebuah node. Node-node tersebut dihubungkan oleh garis atau panah.
Panah (i,j) yang menghubungkan sumber i ke tujuan j membawa 2 jenis informasi: biaya transportasi Cij, dan jumlah yang diangkut Xij. Jumlah supply pada sumber i adalah Si dan jumlah demand pada tujuan j adalah Dj. Tujuan dari model tersebut
1
2
m
1
2
adalah untuk menentukan Xij yang belum diketahui yang akan meminimumkan total
biaya transportasi Cij dan memenuhi semua batasan supply dan demand.
2.2.2. Model Matematika
Andaikan terdapat m pusat sumber/supply dan n pusat tujuan/demand. Suatu produk x akan diangkut dari sumber i ke tujuan j (i = 1, 2, …, m dan j = 1, 2, …, n) dengan
ongkos angkut per unit sebesar Cij, maka jumlah produk sebesar Xij dikirimkan dari
pusat sumber Si ke pusat tujuan Dj, sehingga model matematika persolan transportasi
adalah sebagai berikut:
Fungsi tujuan
1 1
m n
ij ij i j
Min Z c x
= =
=
∑∑
(1)Dengan kendala:
1
1
1 1
, 1, 2,...,
, 1, 2,...,
0 m ij i i n ij j j m n i j i j ij
x S j n
x D i m
S D x = = = = = = = = = ≥
∑
∑
∑
∑
(2) di mana:Xij adalah peubah pengambil keputusan, dalam hal ini jumlah produk yang diangkut
dari titik sumber i ke titik tujuan j
Si adalah jumlah yang disediakan untuk diangkut (supply/sumber) dari titik sumber i Dj adalah jumlah yang diminta untuk didatangkan (demand/kebutuhan) di titik tujuan j Cij adalah ongkos pengangkutan per unit produk xij yang bersangkutan
m adalah jumlah pusat sumber
n adalah jumlah pusat permintaan/tujuan.
Dalam keadaan di mana jumlah sumber tidak sama dengan jumlah permintaan maka
diperoleh model khusus persoalan sebagai berikut:
Fungsi tujuan
1 1
m n
ij ij i j
Min Z c x
= = =
∑∑
Dengan kendala: , 1 1 1, 2,...,, 1, 2,...,
0 m ij i i n ij j j ij
x S j n
x D i m
x = = ≤ = ≥ = ≥
∑
∑
(3)Persoalan transportasi juga dapat dinyatakan dalam bentuk matriks:
Fungsi tujuan :
1 1
m n
ij ij i j
Min C X
= =
∑∑
(4)Dengan batasan:
Ax≤ b (5)
x ≥0 di mana :
1 2 , 1 2
(S ,= S , ...,Sm −D,−D , ...,−Dn)T
b adalah vektor ruas kanan pembatas
Α = matriks koefisien persoalan transportasi
Berdasarkan P. Siagian, untuk m persamaan kendala sumber dan n persamaan
kendala tujuanmaka total kendala sebanyak (m+n) sistem kendala, tetapi hanya
(m+n-1) persamaan yang bebas, sedang satu lagi (boleh yang mana saja) merupakan
persamaan yang dapat dinyatakan sebagai kombinasi linear dari persamaan lainnya,
atau dengan kata lain salah satu kendala merupakan kendala yang berlebih. Ini dapat
dilihat dari sifat keseimbangan persoalan transportasi, yaitu :
1 1 m n i j i j S D = = =
∑
∑
sehingga :1 1 1 1
m n m n
ij ij
i j i j
X X
= = = =
=
atau :
1
1 1 1 1
m n m n
ij in ij
i j i j
X X X
−
= = = =
+ =
∑ ∑
∑∑
(7)akhirnya :
1
1 1 1 1 1
m m n m n
in ij ij
i i j i j
X X X
−
= = = = =
= −
∑
∑∑
∑∑
(8)Dari hasil diatas ditunjukkkan bahwa persamaaan pada ruas kiri yaitu
persamaan ke-n dapat dinyatakan sebagai kombinasi dari persamaan pada ruas kanan,
atau dengan kata lain sesungguhnya persamaan ke-n sudah terpenuhi berdasarkan
persamaan pada ruas kanan. Karena itu persamaan ke-n dapat disingkirkan dari sistem,
sehingga hanya ada (m+n-1) persamaan yang benar-benar bebas artinya berbeda satu
dengan yang lain.
Menurut teori program linear, jika sistem kendala terdiri dari (m+n-1)
persamaan bebas dengan mn variabel, maka variabel basis yaitu variabel yang tidak
berharga nol xij ≠0, terdiri dari (m+n-1) variabel dan variabel nonbasis ada sebanyak
mn – (m+n-1) = (m-1)(n-1) buah yaitu untuk xij= 0. Karena itu jawab layak basis
yang terdiri dari variabel ≠0, tidak lebih dari (m+n-1) variabel, diantaranya tentu
terdapat satu jawab layak basis optimal.
Sebagai ilustrasi, jika terdapat dua daerah sumber A1 dan A2 dan tiga daerah
tujuan, T1, T2 dan T3. Masing-masing sumber memiliki kapasitas 50 dan 70 satuan.
Sedangkan daerah tujuan masing-masing memiliki kebutuhan sebanyak 40, 60 dan 20
satuan. Maka jika daerah sumber A1 telah mengirimkan sebanyak 50 satuan dan
sumber A2 telah mengirimkan sebanyak 70 satuan, dan juga jika daerah tujuan T1 dan
T2 masing-masing telah menerima 40 dan 60 satuan, maka daerah tujuan T3 dengan
sendirinya harus menerima sisanya yaitu 20 satuan. Karena itu daerah tujuan T3 adalah
kendala yang berlebihan. Jadi, hanya ada empat persamaan bebas yaitu persamaan A1,
A2, T1 dan T2, karena itu hanya ada empat variabel basis.
2.3 Total Unimodularitas dari Matriks Transportasi
Suatu matriks transportasi dapat dinyatakan dalam bentuk sebagai berikut :
Kendala sumber
(9)
Kendala tujuan
Matriks Koefisien PersoalanTransportasi
Satu sifat yang paling penting yang dimiiki oleh matriks transportasi adalah sifat total
unimodular. Matriks Αadalah total unimodular jika determinan dari setiap submatriks
bujursangkar yang dibentuk dari matriks Α memiliki nilai -1, 0 atau 1.
Dalam kasus matriks transportasi, karena semua entrinya 1 atau 0 maka setiap
submatriks berukuran 1 1x memiliki determinan bernilai 1 atau 0. Selanjutnya,
submatriks yang berukuran (m n x m n+ ) ( + ) memiliki determinan bernilai 0 karena
( ) 1
rank Α = m n+ − . Terakhir akan ditunjukkan bahwa suatu submatriks
(1 )
kxk < <k m juga memunuhi sifat ini.
AndaikanΑk adalah suatu submatriks berukuran kxk dari Α. Harus
ditunjukkan bahwa det(Αk)= ±1 atau 0. Dengan induksi pada k, andaikan bahwa
sifat benar untuk Αk−1(jelas sifat ini benar untuk Α1). Ingat kembali bahwa setiap
kolom dari Αk mungkin tidak memiliki entri 1, memiliki sebuah entri 1 atau memiliki
dua entri 1.
1. Jika suatu kolom Αktidak memiliki entri 1 maka det
( )
Αk =01 1 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 1 1 1 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 1 1 1 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1 1
1 0 0 0 1 0 0 0 0 1 0 0 0 0 1 0 0 0
0 1 0 0 0 1 0 0 0 0 1 0 0 0 0 1 0 0
0 0 0 1 0 0 0 1 0 0 0 0 1 0 0 0 0 1
=
2. Jika, dalam kasus lain, suatu kolom dari Αk memiliki dua entri 1, maka satu
dari entri 1 akan muncul pada baris sumber dan entri 1 lainnya akan muncul
pada baris tujuan. Dalam kasus ini jumlah dari baris sumber dari Αk sama
dengan jumlah dari baris tujuan dari Αk. Sehingga baris dari Αk adalah
bergantung linier dandet
( )
Αk =0.3. Terakhir, jika suatu kolom dari Αk memiliki sebuah entri 1 maka ekspansi
det(Αk) dengan minor dari kolomnya, diperoleh :
1
det(Αk)= ±det(Αk− )
di mana Αk−1 adalah submatriks berukuran (k−1) (x k−1). Tetapi oleh
hipotesis induksi, det(Αk−1)= ±1 atau 0. Sehingga sifat ini benar untuk Αk
dan hasil ditunjukkan.
2.4Karakteristik Persoalan Transportasi
Seperti telah dijelaskan sebelumnya, persoalan transportasi merupakan tipe khusus
dari persoalan program linear. Dikatakan demikian karena persoalan transportasi
memiliki beberapa karakter atau sifat yang membedakannya dengan persoalan
program linear lainnya, diantaranya :
2.4.1. Persoalan transportasi cenderung memiliki variabel dan konstrain yang cukup
banyak. Hal ini dapat dimaklumi karena kegiatan dari persoalan transportasi
yang mengalokasikan suatu komoditi dari sejumlah sumber dengan kapasitas
yang berbeda-beda dan masing-masing sumber ke sejumlah tujuan yang
membutuhkan komoditi itu dengan tingkat kebutuhan yang berbeda-beda pula.
Karena itu penyelesaian persoalan tranportasi dengan menggunakan metode
penyelesaian program linear biasa, seperti simpleks, menjadi tidak efektif
digunakan karena penggunaan metode simpleks memerlukan penambahan
variabel surplus/slack dan variabel artificial yang akan menambah penghitungan dalam penyelesaiannya.
2.4.2. Adanya hubungan keseimbangan. Dalam persolan transportasi umumnya
diasumsikan bahwa total sumber harus sama dengan total tujuan. Namun dalam persoalan nyata hal ini tentunya tidak selamanya bisa terpenuhi, akan
tetapi persoalan tersebut dapat dijadikan seimbang dengan menambah sumber
dummy atau tujuan dummy. Bila total sumber a lebih besar dari total tujuan b maka tambahkan variabel dummy pada tujuan sebesar selisih dari total sumber dan total tujuan, yaitu sebesar (a – b). Sebaliknya, bila total tujuan b lebih besar
dari total sumber a, maka tambahkan variabel dummy pada sumber sebesar selisih dari total tujuan b dan total sumber a, yakni sebesar (b – a). Dan perlu
diingat bahwa sesungguhnya tidak ada terjadi pengalokasian ke sumber atau
tujuan dummy ini, sehingga biaya yang ditimbulkan juga tidak ada, atau cij
adalah bernilai 0.
2.5 Solusi Persoalan Transportasi
Sebelum menguraikan metode penyelesaian, diberikan beberapa definisi sebagai
referensi persoalan transportasi :
Solusi fisibel, merupakan himpunan alokasi non-negatif Xij ≥0 yang memenuhi
kendala baris dan kolom.
Solusi fisibel awal, merupakan sebuah solusi fisibel dengan jumlah alokasi positifnya adalah (m+n-1) untuk suatu persoalan dengan m sumber dan n tujuan.
Solusi optimal, adalah sebuah solusi yang meminimumkan biaya alokasi.
Seperti dalam metode simpleks, model-model transportasi juga diselesaiakan
dengan menggunakan sebuah tabel. Andaikan terdapat m daerah sumber; serta n
daerah tujuan; dengan biaya transportasi dari sumber i ke tujuan j adalah Cij (i = 1, 2,
…, m dan j = 1, 2, …, n) dan jumlah yang diangkut dari sumber i ke tujuan j adalah xij
(i = 1, 2, …, m dan j = 1, 2, …, n). Maka bila disusun ke dalam sebuah bentuk tabel
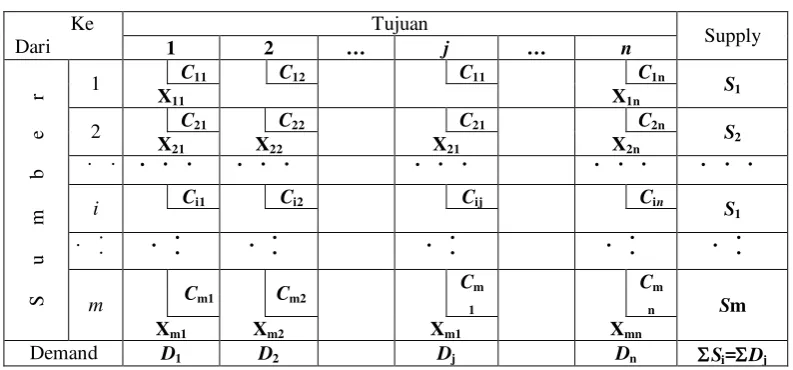
Tabel 2.1 Tabel Persoalan Transportasi
Ke Dari
Tujuan
Supply
1 2 … j … n
S u m b e
r 1
C11 C12 C11 C1n
S1
X11 X1n
2 C21 C22 C21 C2n S2
X21 X22 X21 X2n
.
. . . . . . . . . . . . . . . .
i Ci1 Ci2 Cij Cin S1
.
.
. . . . . . . . . . . . . . . .
m Cm1 Cm2
Cm 1
Cm
n Sm
Xm1 Xm2 Xm1 Xmn
Demand D1 D2 Dj Dn ΣSi=ΣDj
2.5.1. Tahapan Penyelesaian Persoalan Transportasi
2.5.1.1. Tahap penentuan solusi basis awal
Ada 3 metode yang umum digunakan dalam penetuan solusi basis awal, yakni :
1. Metode Pojok Barat-Laut, metode ini bekerja cenderung lebih mudah dibanding metode lainnya, akan tetapi metode ini memiliki kelemahan karena lebih
menitikberatkan pada proses jadi nilai menjadi terabaikan, sehingga metode ini
tidak memberikan solusi yang optimum.
2. Metode biaya sel minimum, metode ini bekerja dengan mengalokasikan sumber pada sel-sel yang memiliki biaya terkecil terlebih dahulu. Dibandingkan dengan
metode Northwest Corner, metode minimum cost biasanya lebih unggul dalam pencapaian nilai optimal. Secara logika hal ini dapat diterima karena metode
Northwest Corner tidak memperhitungkan biaya sama sekali dalam pengalokasiannya, sedangkan metode minimum cost memperhitungkan biaya.
3. Metode Pendekatan vogel, metode ini biasanya memberikan hasil yang lebih baik dibanding metode northwest corner dan minimum cost. Namun penyelesaian dengan metode ini juga cenderung lebih kompleks.
2.5.1.2. Tahap uji optimalitas
Tahap uji optimalitas mancakup penetuan entering variable dan leaving variable. Tahap uji optimalitas merupakan tahap berikutnya dari teknik pemecahan
persoalan transportasi untuk mengetahui apakah solusi yang diperoleh sudah optimal
atau belum. Ada 2 metode yang dapat digunakan dalam uji optimalitas ini, yaitu
metode Batu Loncatan dan metode Distribusi yang dimodifikasi (MODI). Metode-metode diatas merupakan Metode-metode yang umum digunakan untuk menyelesaikan
persoalan transportasi. Namun pada tulisan ini seperti telah dijelaskan di muka akan
digunakan algoritma Arsham-Khan untuk menyelesaikan persoalan transportasi.
2.5.2. Algoritma Arsham-Kahn
Ada beberapa keunggulan algoritma ini, yaitu :
1. Tidak ada variabel artificial (seperti dalam simpleks) atau penambahan
variabel slack/surplus (seperti dalam dual simpleks) 2. Semua analisis postoptimal tersedia
3. Terlihat lebih cepat dari metode program linear lainnya
4. Kesederhanaannya: hanya menggunakan Gauss Jourdan Pivotting.
Sebelum menguraikan langkah-langkah penyelesaian dengan algoritma ini, terlebih
dahulu diperkenalkan notasi-notasi yang akan dipergunakan.
PT : persoalan transportasi
PL : program linear
SS : stepping-stone
GJP : Gauss-Jourdan Pivotting
VB : variabel basis
HVB : himpunan variabel basis
FE : fisibelitas
BP : baris pivot (baris yang ditentukan untuk variabel masuk)
KP : kolom pivot (kolom yang berhubungan dengan variabel masuk)
EP : elemen pivot
BT : baris terbuka (sebuah baris yang belum diisi variabel basis ; diberi
label [?]
[?] : label untuk baris yang belum diisi variabel basis (baris terbuka)
NSK : nilai sebelah kanan
Algoritma ini dimulai dengan inisialisasi persiapan dan diikuti oleh dua
tahapan. Tahap pertama merupakan iterasi VB untuk membangun HVB yang mungkin
fisibel atau tidak. Tahap kedua merupakan iterasi FE untuk membangun solusi yang
fisibel dan optimum. Kedua tahapan ini menggunakan transformasi GJP. Akan tetapi
berbeda dalam metode memilih EP. Iterasi VB menggunakan kriteria simpleks, yang
dimodifikasi hanya untuk memilih baris terbuka yang belum diisi VB. Strategi ini
membawa kepada tercapainya titik optimal, dan terkadang menyebabkan
ketidakfisibelan. Iterasi FE, jika dibutuhkan, membawa kembali solusi kepada
fisibelitas dengan menggunakan kriteria dual simpleks untuk memilih EP.
Jelas, dalam suatu persoalan transportasi yang setimbang, satu dari (m+n)
konstrain adalah berlebih. Dari pada mengeliminasi konstrain secara sebarang, maka
pada algoritma ini dieliminasi konstrain yang akan lebih banyak memberikan
pengurangan jumlah iterasi pada tahap pertama.
Adapun dalam tahapan-tahapan ini masing-masing dapat dikelompokkan
berdasarkan operasi yang menambah keefisienan dalam pengerjaannya. Langkah 0.1
dan 0.2 mengeliminasi konstrain yang akan lebih banyak mengurangi jumlah iterasi.
Kelompok kedua terdiri dari tiga operasi: 1.2c, 2.2a dan 2.2d, yang bersama-sama
secara progresif mengurangi ukuran tabel.
Iterasi 0 (Persiapan)
0.0 – Formulasi matriks-biaya PT
0.1 – Reduksi baris-kolom (atau reduksi kolom-baris)
Dari setiap baris kurangkan terhadap biaya terkecil.
Akumulasi pengaruh dari setiap reduksi baris menjadi biaya awal.
Demikian, dari setiap kolom kurangkan terhadap biaya terkecil.
Akumulasi pengaruh dari setiap reduksi kolom menjadi biaya awal.
0.2 – Eliminasi konstrain berlebih
Periksa baris atau kolom yang memiliki nilai nol terbanyak
Eliminasi konstrain tersebut.
0.3– Bentuk tabel simpleks
Gunakan sebuah baris untuk setiap konstrain dan sebuah kolom untuk setiap
variabel.
Jangan menambahkan variabel artificial
0.4– Tentukan HVB
Untuk setiap kolom yang merupakan vektor satuan, beri label baris dengan
nama variabel pada kolom tersebut.
Beri label baris yang lain dengan tanda tanya (?).
0.5– Hapus kolom VB.
Iterasi 1 (Tahap VB)
1.0 – Uji terminasi iterasi HVB
Jika terdapat label (?) atau terdapat baris terbuka, maka lanjutkan iterasi VB.
Jika tidak HVB telah lengkap; mulai tahap FE (langkah 2.0).
1.1 – Pilih VB dari EP
KP : Pilih nilai Cij terkecil dan tetapkan sebagai bakal kolom.
BP : Pilih baris terbuka sebagai bakal baris.
EP : Pilih bakal baris dan kolom dengan K/B non-negatif terkecil.
Jika tidak ada K/B non-negatif, pilih K/B yang bernilai absolut terkecil.
Jika elemen pivotnya bernilai nol, maka pilih Cij terbaik selanjutnya.
1.2 – Penambahan HVB
(a) Lakukan GJP.
(b) Ubah label baris (?) dengan nama variabel.
(c) Pindahkan KP dari tabel.
Lanjutkan iterasi HVB (kembali ke 1.0)
Iterasi 2 (Tahap FE)
2.0 – Uji terminasi iterasi FE
Jika NSK non-negatif, maka tabel sudah optimal. Interpretasikan hasilnya.
Jika terdapat NSK negatif maka lanjutkan iterasi FE (langkah 2.1).
2.1 – Pilih FE dari EP
BP : Baris dengan NSK paling negatif .
KP : Kolom dengan sebuah elemen negatif pada BP.
2.2 – Transformasi FE
(a) Simpan KP di luar tabel.
(b) Lakukan PGJ biasa.
(c) Tukarkan label KP dan BP.
(d) Ganti KP baru dengan KP lama yang disimpan dalam (a).
Lanjutkan iterasi FE (kembali ke 2.0)
Bagian Akhir Algoritma
Tahap pertama dari algoritma ini dapat digolongkan sebagai pencarian himpunan
variabel basis yang menuju kepada titik optimal. Tahap kedua, jika diperlukan,
membawa kembali kepada fisibelitas. Pada kedua tahapan tersebut digunakan Gauss-Jourdan pivoting. Namun, kriteria pemilihannya berbeda untuk tiap tahap. Tahap pertama menggunakan kriteria simplek biasa, dibatasi hanya memilih baris terbuka.
Jika diperlukan, fisibelitas ditiadakan. Tahap kedua menggunakan kriteria dual
simpleks biasa, dan memastikan penghentian algoritma.
Garis Besar Pembuktian Algoritma
Dasar teori dari algoritma ini secara luas terletak pada sifat unimodular dari matriks
koefisien dalam tabel simpleks persoalan transportasi; yaitu nilai-nilai koefisiennya
adalah 0, -1 atau 1. Dengan menggunakan ketentuan bahwa matriks unimodular tetap
unimodular setelah dilakukan Gauss-jourdan pivoting. Berdasarkan formulasi program linear, optimalitas diperoleh ketika semua Cij non-negatif dan algoritma
berakhir.
Algoritma ini dimulai dengan semua Cij non-negatif. Terlihat bahwa, dengan
menggunakan operasi yang diberikan untuk memperoleh solusi basis dan fisibel, Cij
tetap non-negatif.
Langkah 0.1 : jelas, dengan reduksi baris-kolom ( kolom-baris) matriks biaya,
sifat non-negatif dari Cij ini tetap terjaga.
Langkah 0.2 : jumlah variabel basis terbaca yang ada sama dengan jumlah Cij = 0
pada baris (kolom) yang berhubungan dengan kendala yang terpilih
untuk dieliminasi sebagai kendala berlebih.
Langkah 0.5 : menghapus kolom basis, diijinkan jika variabel tersebut ditambahkan
menjadi sebuah basis, bukan mengganti variabel. (Hal ini
mengurangi kompleksitas secara signifikan, dan tabel yang dihasilkan
lebih kecil dari ukurannya).
Langkah 1.1 : kriteria pemilihan. Dengan memilih Cij terkecil menjamin bahwa
himpunan Cij tetap non-negatif setelah pivoting. Jika pivoting tidak memungkinkan (tidak terdapat C/R yang berhingga/finite), pilih Cij
terkecil selanjutnya. Akan tetapi, nilai dari Cij terkecil tidak berubah
karena elemen baris pivot pada kolom tersebut adalah nol.
Langkah 2.1 : jika ada sebuah NSK < 0, maka terdapat paling sedikit satu elemen
bernilai -1 pada baris itu. Jika ini tidak terjadi, maka konstrainnya
tidak konsisten atau berlebih, yang tidak mungkin terjadi pada
formulasi program linear persoalan transportasi.
2.5.3 Eliminasi Gauss-Jourdan
Dalam aljabar linear, eliminasi Gauss-Jordan adalah versi dari eliminasi Gauss. Pada
metode eliminasi Gauus-Jordan elemen-elemen di bawah maupun di atas diagonal
utama suatu matriks dijadikan nol. Hasilnya adalah matriks tereduksi yang berupa
matriks diagonal satuan (Semua elemen pada diagonal utama bernilai 1,
elemen-elemen lainnya nol).
Jika eliminasi Gauss-Jordan diterapkan dalam matriks persegi, metode tersebut
dapat digunakan untuk menghitung invers dari matriks. Eliminasi Gauss-Jourdan
hanya dapat dilakukan dengan menambahkan matriks identitas dengan
dimensi yang sama dari suatu matriks persegi A, dan melalui operasioperasi matriks:
[ ]
1AI ⇒ IA−
2.5.4 Penghitungan Matriks Invers Basis Β−1
Seperti telah dijelaskan sebelumnya bahwa dalam solusi persoalan transportasi yang
diperoleh dari algoritma Arsham-Kahn tidak akan diperoleh matriks basis invers Β−1,
yang diperlukan untuk analisis postoptimal. Hal ini terjadi karena dalam metode penyelesaian ini tidak ada penambahan variabel artifisial.
Namun, nilai ini dapat diperoleh dengan memformulasikan bentuk parametrik
NSK pada persoalan transportasi dan menyelesaikannya dengan algoritma ini
sehingga diperoleh informasi tersebut dengan sedikit tambahan penghitungan.
Andaikan terdapat persoalan transportasi berikut,
Persoalan Z1
1 1 1 , m n ij ij i j
Minimumkan Z C X
= =
=
∑∑
(10)Dengan batasan supply,
1 m ij i i X S = =
∑
untuk j = 1, 2, …, n (11)dan batasan demand,
1 n ij j j X D = =
∑
untuk i = 1, 2, …, m (12), , 0
ij j i
X D S ≥
Tanpa menghilangkan bentuk umumnya, diberikan batasan yakni persolan
transportasi seimbang, yakni :
1 1 , m n i j i j S D = = =
∑
∑
sehingga salah satu dari m+n batasan merupakan batasan yang berlebih dan dapat
ditiadakan. Bentuk parametrik dari Z1 menjadi :
Persolaan Z2
' 2
1 1
( )
m n
ij ij ij
i j
Minimumkan Z C C X
= =
=
∑∑
+ (13)Dengan batasan,
1
m
ij i i
i
X S S
=
= + ∆
∑
untuk j = 1, 2, …, n (14)1
n
ij j j
j
X D D
=
= + ∆
∑
untuk i = 1, 2, …, m (15)Di mana parameter NSK, ∆Sidan ∆Dj dan nilai parameter biaya Cij' merupakan data yang belum pasti nilainya. Jelas, persoalan tersebut akan tetap
seimbang jika memenuhi:
1 1 m n i j i j S D = = ∆ = ∆
∑
∑
(16)Agar diperoleh bentuk NSK non-negatif pada gangguan persoalan transportasi
tersebut, gangguan parameter harus memenuhi kondisi berikut :
Si+ ∆ ≥Si 0, dan Dj+ ∆ ≥Dj 0 (17)
Sehingga dengan menyelesaikan persoalan dengan algoritma Arsham-Kahn
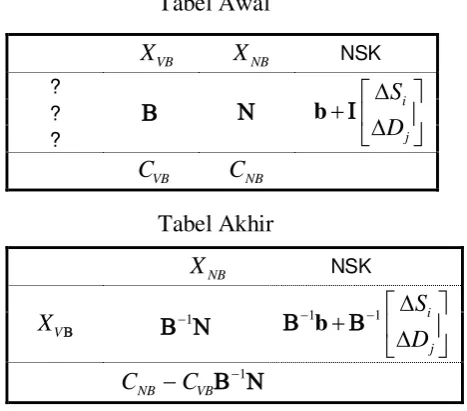
diperoleh bentuk tabel berikut :
Tabel Awal
Tabel Akhir
Tabel awal dibagi menjadi koefisien variabel basis Β, koefisien variabel
non-basis Ν, yang juga muncul pada tabel akhir, dan kolom NSK yang terdiri dari nilai
VB
X XNB NSK
?
Β Ν i
j S D ∆ + ∆ b Ι ? ? VB
C CNB
NB
X NSK
V
X Β Β Ν−1 1 1 i
j S D − + − ∆ ∆ b Β Β 1 NB VB
[image:30.595.99.333.475.680.2]nominal NSK dan parameter gangguan ∆Si dan ∆Dj, dan Ι merupakan matriks identitas berorde (m+n-1), atau dapat ditulis :
∆S1 ∆S2 ∆Sp ∆ ∆D1 D2 ∆Dq
I =
1
2
1
2
1 0 0 0 0 0
0 1 0 0 0 0
0 0 1 0 0 0
0 0 0 1 0 0
0 0 0 0 1 0
0 0 0 0 0 1
p q S S S D D D ∆ ∆ ∆ ∆ ∆ ∆
Di mana: p + q = m + n – 1.
Seperti telah dijelaskan sebelumnya solusi persoalan akan terdiri dari sebanyak m+n-1
variabel atau terdapat sebanyak m+n-1 variabel basis, jadi matriks B merupakan koefisien dari m+n-1 variabel ini. Namun dalam proses penyelesaian persolan
dengan algoitma Arsham-Khan, kolom-kolom variabel akan dihapus begitu variabel
tersebut dimasukkan ke dalam basis, atau dengan kata lain kolom untuk variabel basis
ditiadakan. Akan tetapi berdasarkan tabel awal dan karena persoalan ini diselesaikan
dengan metode Gauss-Jourdan maka berlaku
[ ]
Β Ι ⇒ Ι Β −1 sehingga diperolehhasil seperti pada tabel akhir. Analisis sensitivitas dilakukan setelah diperoleh matriks
invers basis Β−1, yaitu matriks koefisien dari ∆Si dan ∆Dj pada solusi
optimal Xij*(∆ ∆Si, Dj).
2.6 Analisis Sensitivitas Pada Persoalan Transportasi
Analisis sensitivitas pada persoalan program linear dilakukan setelah diperoleh solusi
optimal karena adanya perubahan suatu nilai sebelah kanan atau koefisien fungsi
objektif. Berdasarkan perubahan tersebut maka diperiksa dampak perubahannya
terhadap solusi optimal dan nilai optimal. Uji terhadap perubahan solusi optimal dan
nilai optimal tersebut disebut analisis sensitivitas.
Sebagai contoh , jika solusi optimal adalah sebagai berikut :
xΒ* =Β−1b, Z* =CΒΒ−1b (18)
Di mana CΒ adalah vektor koefisien dari fungsi objektif yang koefisiennya berhubungan dengan indeks variabel basis, *
xΒ adalah solusi optimal basis dan
*
Z adalah nilai optimal. Jadi, rasio perubahan solusi optiml dan nilai optimal terhadap perubahan bkadalah sebagai berikut :
* 1 dx
d
−
=
b
Β Β atau
* *
, , 1, 2, ...,
i i k k dx
y k m
db = =
Β
(19)
di mana yi k*, merupakan elemen ke (i,k) dari matriks Β−1.
Analisis sensitivitas pada parameter sebelah kanan persoalan transportasi tidak
dapat dilakukan dengan menggunakan metode analisis sensitivitas yang digunakan
pada persoalan program linear biasa. Hal ini disebabkan, karena satu parameter,
beberapa parameter mungkin berubah secara simultan atau serentak karena perubahan
parameter harus juga memenuhi persamaan keseimbangan model transportasi
(
∑
Si =∑
Dj) (karena keseimbangan persoalan transportasi, paling sedikit satu lagi parameter sebelah kanan harus diubah). Untuk menguji dan mengukur nilai ini,digunakan konsep diferensial lengkap.
Untuk fungsi
Definisi :
( )
y= f x , didefinisikan:
(a) dx, disebut diferensial x, dengan hubungan dx= ∆x. (b) dy, disebut diferensial y, dengan dy= f x dx′( ) .
Dari definisi, diferensial peubah bebas adalah sama dengan pertambahan
peubah tersebut, tetapi diferensial peubah yang bergantung tidak sama dengan
Untuk fungsi 2 variabel bebas x dan ,y z = f(x, y), didefinisikan dx= ∆x dan
dy= ∆y. Bila x berubah sedangkan y tetap, z merupakan fungsi dari x saja dan
diferensial parsial z terhadap x didefinisikan sebagai d zx f x y dx( , ) x zdx x
∂
= =
∂ .
Dengan cara yang sama, diferensial parsial zterhadap y didefinisikan sebagai
( , )
y y y
z d z f x y d dy
y
∂
= =
∂ . Diferensial total dz didefinisikan sebagai jumlah diferensial
parsialnya, yaitu,
z z
dz dx dy
x y
∂ ∂
= +
∂ ∂ (20)
Untuk fungsi w=F x y z( , , , ..., )t , diferensial total dwdidefinisikan sebagai
...
w w w w
dw dx dy dz dt
x y z t
∂ ∂ ∂ ∂
= + + + +
∂ ∂ ∂ ∂ (21)
Andaikan bahwa, diantara nilai sebelah kanan k parameter diubah.
Selanjutnya, berdasarkan sifat keseimbangan persoalan transportasi,
∑ ∑
si = djdanj j
d d
∆ < dan ∆ <si si harus dipenuhi. Maka berdasarkan konsep diferensial total,
diperoleh persamaan berikut :
* * *
*
1 2
1 2
...
i i i
i
B B B
B m
m
x x x
dx =∂ d + ∂ d + +∂ d
∂b b ∂b b ∂b b (22)
Dengan memperhatikan konsep umum perubahan dalam kasus diferensial
lengkap, dapat dianggap bahwa db1 = ∆b1, sehingga diperoleh * * i i
B B
dx = ∆x . Dengan
menggantikan * * , i B i k k dx y
db = dalam persamaan (22) dan juga dengan memperhatikan
perubahan dalam k parameter nilai sebelah kanan, persamaan berikut diperoleh :
* * * * ,1 1 ,2 2 ... , i
B i i i k k
x y y y
∆ = ∆ +b ∆b + + ∆b (23 )
Karena y*i j, , j=1, 2, ...,k adalah faktor baris ke i dari matriks Β−1 dan juga
berdasarkan sifat unimodular pada Β−1, persamaan berikut diperoleh :
*
1
( ) , 1, 2, ..., i
k
i j
x α i m
=
∆ Β =
∑
∆b = α = −1, 1 atau 0 (24)Seperti telah dijelaskan sebelumnya, pada analisis sensitivitas suatu persoalan,
perubahan parameter tidak boleh mengubah basis optimal yang telah diperoleh.
Sehingga, setelah perubahan nilai sebelah kanan, harus dipenuhi :
* *
0, 1, 2, ...,
i i
xΒ + ∆xΒ ≥ i= m (25)
yang menyatakan kemampuan basis tetap fisibel setelah perubahan. Solusi optimal
fisibel dan basis tidak berubah setelah perubahan parameter sebelah kanan secara
simultan diuji sebagai berikut : perlu dicari batasan ∆bi yang tidak membawa ke dalam bentuk infisibel atau tidak layak pada solusi optimal. Sebagai contoh,
persamaan berikut dipenuhi untuk ∆bi:
* *
0
i i xΒ + ∆xΒ ≥
* * * 2 *
,1 ,2 , 1
1 1
... 0, 1, 2, ...,
i
k
i i i k
x +y + y ∆ + + y ∆ ∆ ≥ i= m
∆ ∆ b b b b b
Β (26)
* *
1
0 , 1, 2, ...,
i i
dx
x i m
*
1
0
i dx
db ≤
Β
, maka 1 **
1 i
i x d
dx d
− ≤
b
b
Β Β
(28)
dan secara umum,
* *
1 *
1
1
min i i 0
i x dx s
dx d d
−
∆ ≤ ≤
b
b
b Β Β
Β
Β (29)
dipenuhi yang menyatakan perubahan maksimum b1, di mana SΒ merupakan indeks variabel basis. Batasan untuk paramer lainnya dapat ditentukan dengan cara yang
sama.
BAB III PEMBAHASAN
Di bawah ini diberikan suatu persoalan dalam bentuk tabel trasnportasi.
Tabel 1. Persoalan Transportasi
Asal
Tujuan
Persediaan
T1 T2 T3 T4 T5 T6
A1 18
A2 22
A3 39
A4 14
Kebutuhan 10 11 13 20 24 15 104
3.1 Penghitungan Solusi optimal
Sebagai langkah awal akan dicari solusi optimal dengan menggunakan algoritma Arsham-Kahn berikut.
Iterasi 0 (Persiapan)
0.0- Formulasi matriks biaya PT
Formulasi matriks biaya telah dinyatakan pada tabel 1 diatas karena persoalan
transportasi sudah setimbang.
0.1- Reduksi baris-kolom (reduks i kolom baris). Reduksi baris yaitu dengan
mengurangi masing-masing baris dengan biaya terkecil dari baris tersebut, yakni
untuk baris 1, 2, 3, dan 4 secara berturut dikurangi dengan 8, 12, 10 dan 12.
Berdasarkan tabel baris tereduksi kemudian dilakukan reduksi kolom yaitu
dengan mengurangkan masing-masing kolom dengan biaya terkecil dari kolom
tersebut, yakni secara berturut untuk kolom 1 sampai 6 dengan 2, 4, 0, 0, 0 dan 1.
10 12 13 8 14 19
18
17 16 13 14 10 18
19 18 20 21 12 13
19 16
12
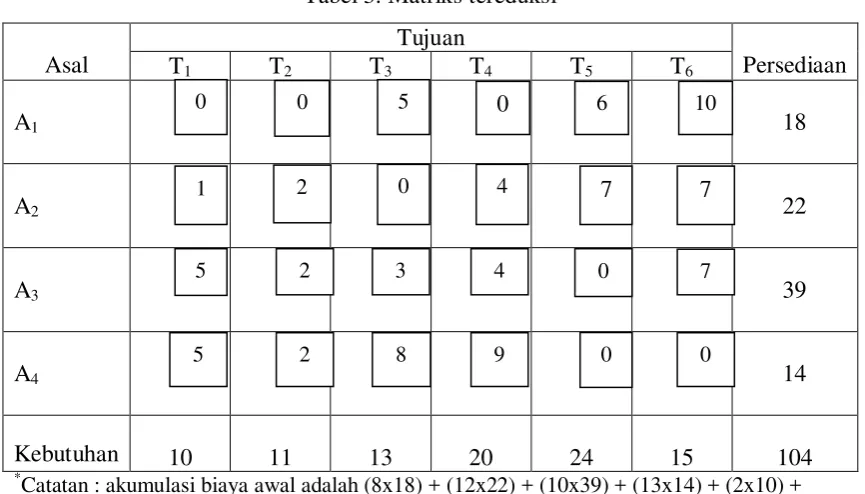
Matriks baris tereduksi diberikan oleh tabel 2 dan 3 berikut.
Tabel 2. Matriks tereduksi baris
Asal
Tujuan
Persediaan
T1 T2 T3 T4 T5 T6
A1 18
A2 22
A3 39
A4 14
Kebutuhan 10 11 13 20 24 15 104
`
Tabel 3. Matriks tereduksi
Asal
Tujuan
Persediaan
T1 T2 T3 T4 T5 T6
A1 18
A2 22
A3 39
A4 14
Kebutuhan 10 11 13 20 24 15 104
*
Catatan : akumulasi biaya awal adalah (8x18) + (12x22) + (10x39) + (13x14) + (2x10) + (4x11) + (1x15), atau 1059
0.2– Eliminasi konstrain berlebih
Baris pertama (asal 1) memiliki nilai nol terbanyak, maka konstrain asal 1 akan
dieliminasi
0.3– Formulasi tabel simpleks
2 4 5 0 6 11
6
7 6 3 4 0 8
7 6 8 9 0 1
7 4
0
3 8
0 0 5 0 6 10
2
5 2 3 4 0 7
5 2 8 9 0 0
7 4
0
1 7
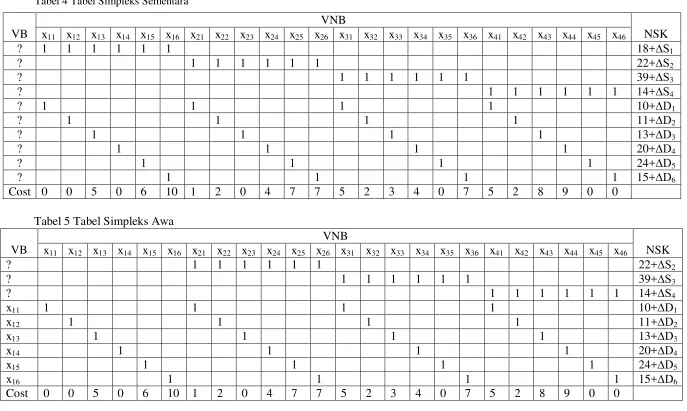
[image:37.595.101.534.402.649.2]Pada Tabel 4 ditunjukkan tabel awal sementara yang masih mengandung baris
asal 1.
0.4- Menentukan HVB
Pada tabel 5 diperoleh enam variabel sebagai himpunan variabel basis awal dan
tiga baris terbuka
0.5- Hapus kolom HVB
Ditunjukkan oleh tabel 6
Iterasi 1 (Tahap VB)
1.0- Uji terminasi HVB
Terdapat label (?) atau terdapat baris terbuka, lanjutkan iterasi HVB pada langkah
1.1
1.1- Memilih VB dari EP
KP: Pilih Cij terkecil, kolom x23, x35, x45, dan x46 merupakan bakal kolom.
BP: Baris 1, 2 dan 3 merupakan baris terbuka.
EP: Bakal EP tak nol diberi tanda [ ] dan ( ) pada tabel 6. Tanda [ ] yakni variabel
x46 memiliki K/B non- negatif terkecil.
1.2- Penambahan HVB
(a) Lakukan GJP
(b) Ubah label baris (?) dengan variabel x46
(c) Hapus KP dari tabel, diperoleh hasil pada tabel 7.
Akhiri iterasi HVB (kembali ke langkah 1.0)
1.0- Uji terminasi iterasi HVB
Terdapat label (?) (terdapat baris terbuka), lanjutkan iterasi VB ke langkah 1.1
Proses ini berlanjut hingga tidak ada lagi baris terbuka, hasil ditunjukkan pada
tabel 9. Kemudian dilanjutkan ke tahap feasibelitas.
Iterasi 2 (Tahap FE)
2.0- Uji terminasi iterasi FE
NSK memiliki elemen negatif, lanjutkan iterasi FE (langkah 2.1)
2.1- Pilih FE dari EP
KP: Perhatikan hanya kolom dengan elemen negatif. Pilih kolom dengan Cij
terkecil yakni kolom x36
EP: Elemen pivot diberi tanda [ ] pada tabel 9.
2.2- Transformasi FE
(a) Simpan KP (kolom x36) di luar tabel
(b) Lakukan GJP biasa
(c) Tukar label KP (x36) dan BP (x15)
(d) Ganti KP baru dengan KP lama yang disimpan pada (a)
Hasil ditunjukkan pada tabel 10.
Akhiri iterasi FE (kembali ke langkah 2.0)
2.0- Uji terminasi iterasi FE
NSK memiliki elemen negatif, lanjutkan iterasi FE (langkah 2.1)
2.1- Pilih FE dari EP
BP: Pilih baris dengan NSK terkecil. Baris x16 memiliki NSK terkecil.
KP: Pilih yang memiliki Cij terkecil yakni x33.
EP: Elemen pivot diberi tanda [ ] pada tabel 10.
2.2- Transformasi FE
(a) Simpan KP ( kolom x33) di luar tabel
(b) Lakukan GJP biasa
(c) Tukar label KP (x33) dan BP (x16)
(d) Ganti KP baru dengan KP lama yang disimpan pada (a)
Hasil ditunjukkan pada tabel 11.
Akhiri iterasi FE (kembali ke langkah 2.0)
2.0- Uji terminasi iterasi FE
NSK memiliki elemen negatif, lanjutkan iterasi FE (langkah 2.1)
Proses ini berulang hingga lima iterasi dan tidak terdapat lagi NSK bernilai
negatif dan diperoleh hasil optimal pada tabel 14.
Tabel 5 Tabel Simpleks Awa
VB x11 x12 x13 x14 x15 x16 x21 x22 x23 x24 x25 x26 x31 x32 x33 x34 x35 x36 x41 x42 x43 x44 x45 x46 NSK
? 1 1 1 1 1 1 18+∆S1
? 1 1 1 1 1 1 22+∆S2
? 1 1 1 1 1 1 39+∆S3
? 1 1 1 1 1 1 14+∆S4
? 1 1 1 1 10+∆D1
? 1 1 1 1 11+∆D2
? 1 1 1 1 13+∆D3
? 1 1 1 1 20+∆D4
? 1 1 1 1 24+∆D5
? 1 1 1 1 15+∆D6
Cost 0 0 5 0 6 10 1 2 0 4 7 7 5 2 3 4 0 7 5 2 8 9 0 0
VB
VNB
NSK x11 x12 x13 x14 x15 x16 x21 x22 x23 x24 x25 x26 x31 x32 x33 x34 x35 x36 x41 x42 x43 x44 x45 x46
? 1 1 1 1 1 1 22+∆S2
? 1 1 1 1 1 1 39+∆S3
? 1 1 1 1 1 1 14+∆S4
x11 1 1 1 1 10+∆D1
x12 1 1 1 1 11+∆D2
x13 1 1 1 1 13+∆D3
x14 1 1 1 1 20+∆D4
x15 1 1 1 1 24+∆D5
x16 1 1 1 1 15+∆D6
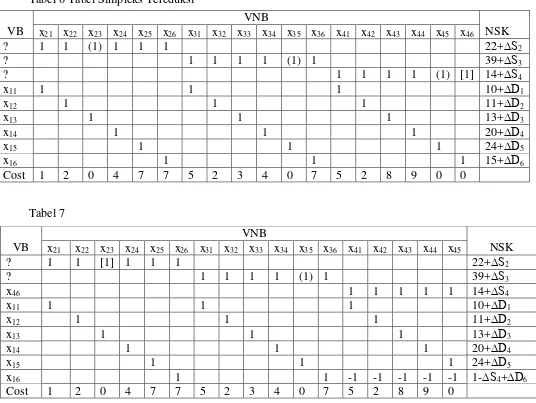
[image:40.842.109.796.114.525.2]Tabel 6 Tabel Simpleks Tereduksi
Tabel 7 VB
VNB
NSK x21 x22 x23 x24 x25 x26 x31 x32 x33 x34 x35 x36 x41 x42 x43 x44 x45 x46
? 1 1 (1) 1 1 1 22+∆S2
? 1 1 1 1 (1) 1 39+∆S3
? 1 1 1 1 (1) [1] 14+∆S4
x11 1 1 1 10+∆D1
x12 1 1 1 11+∆D2
x13 1 1 1 13+∆D3
x14 1 1 1 20+∆D4
x15 1 1 1 24+∆D5
x16 1 1 1 15+∆D6
Cost 1 2 0 4 7 7 5 2 3 4 0 7 5 2 8 9 0 0
VB
VNB
NSK x21 x22 x23 x24 x25 x26 x31 x32 x33 x34 x35 x36 x41 x42 x43 x44 x45
? 1 1 [1] 1 1 1 22+∆S2
? 1 1 1 1 (1) 1 39+∆S3
x46 1 1 1 1 1 14+∆S4
x11 1 1 1 10+∆D1
x12 1 1 1 11+∆D2
x13 1 1 1 13+∆D3
x14 1 1 1 20+∆D4
x15 1 1 1 24+∆D5
x16 1 1 -1 -1 -1 -1 -1 1-∆S4+∆D6
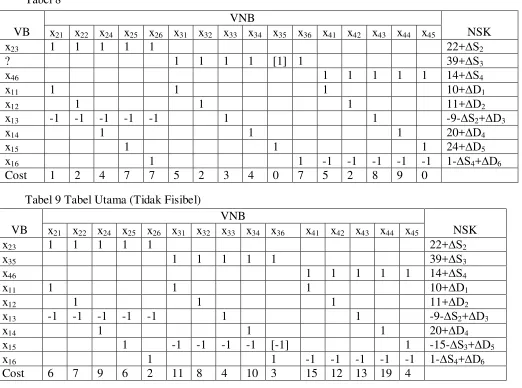
Tabel 8
Tabel 9 Tabel Utama (Tidak Fisibel) VB
VNB
NSK x21 x22 x24 x25 x26 x31 x32 x33 x34 x35 x36 x41 x42 x43 x44 x45
x23 1 1 1 1 1 22+∆S2
? 1 1 1 1 [1] 1 39+∆S3
x46 1 1 1 1 1 14+∆S4
x11 1 1 1 10+∆D1
x12 1 1 1 11+∆D2
x13 -1 -1 -1 -1 -1 1 1 -9-∆S2+∆D3
x14 1 1 1 20+∆D4
x15 1 1 1 24+∆D5
x16 1 1 -1 -1 -1 -1 -1 1-∆S4+∆D6
Cost 1 2 4 7 7 5 2 3 4 0 7 5 2 8 9 0
VB
VNB
NSK x21 x22 x24 x25 x26 x31 x32 x33 x34 x36 x41 x42 x43 x44 x45
x23 1 1 1 1 1 22+∆S2
x35 1 1 1 1 1 39+∆S3
x46 1 1 1 1 1 14+∆S4
x11 1 1 1 10+∆D1
x12 1 1 1 11+∆D2
x13 -1 -1 -1 -1 -1 1 1 -9-∆S2+∆D3
x14 1 1 1 20+∆D4
x15 1 -1 -1 -1 -1 [-1] 1 -15-∆S3+∆D5
x16 1 1 -1 -1 -1 -1 -1 1-∆S4+∆D6
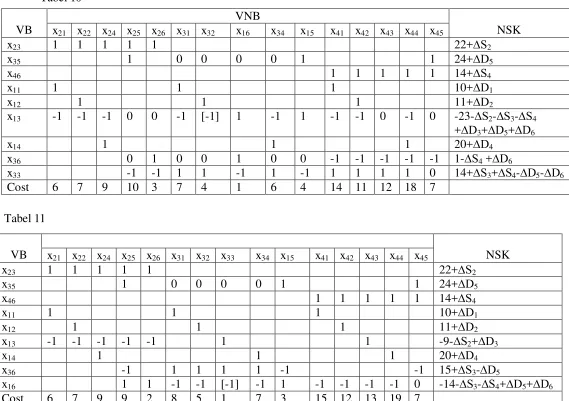
Tabel 10
Tabel 11 VB
VNB
NSK x21 x22 x24 x25 x26 x31 x32 x16 x34 x15 x41 x42 x43 x44 x45
x23 1 1 1 1 1 22+∆S2
x35 1 0 0 0 0 1 1 24+∆D5
x46 1 1 1 1 1 14+∆S4
x11 1 1 1 10+∆D1
x12 1 1 1 11+∆D2
x13 -1 -1 -1 0 0 -1 [-1] 1 -1 1 -1 -1 0 -1 0 -23-∆S2-∆S3-∆S4 +∆D3+∆D5+∆D6
x14 1 1 1 20+∆D4
x36 0 1 0 0 1 0 0 -1 -1 -1 -1 -1 1-∆S4 +∆D6
x33 -1 -1 1 1 -1 1 -1 1 1 1 1 0 14+∆S3+∆S4-∆D5-∆D6
Cost 6 7 9 10 3 7 4 1 6 4 14 11 12 18 7
VB x21 x22 x24 x25 x26 x31 x32 x33 x34 x15 x41 x42 x43 x44 x45 NSK
x23 1 1 1 1 1 22+∆S2
x35 1 0 0 0 0 1 1 24+∆D5
x46 1 1 1 1 1 14+∆S4
x11 1 1 1 10+∆D1
x12 1 1 1 11+∆D2
x13 -1 -1 -1 -1 -1 1 1 -9-∆S2+∆D3
x14 1 1 1 20+∆D4
x36 -1 1 1 1 1 -1 -1 15+∆S3-∆D5
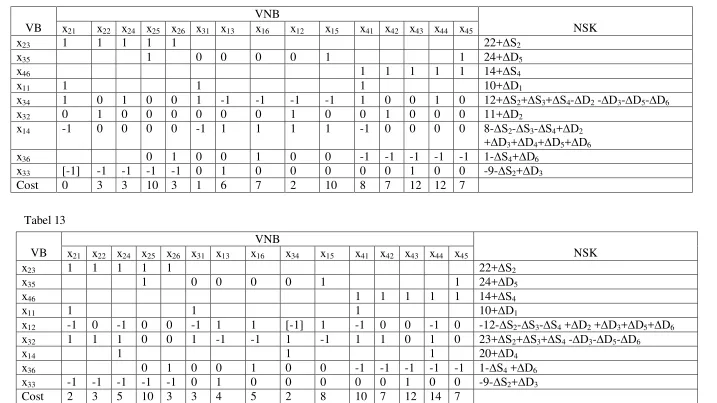
Tabel 12
Tabel 13 VB
VNB
NSK x21 x22 x24 x25 x26 x31 x13 x16 x12 x15 x41 x42 x43 x44 x45
x23 1 1 1 1 1 22+∆S2
x35 1 0 0 0 0 1 1 24+∆D5
x46 1 1 1 1 1 14+∆S4
x11 1 1 1 10+∆D1
x34 1 0 1 0 0 1 -1 -1 -1 -1 1 0 0 1 0 12+∆S2+∆S3+∆S4-∆D2 -∆D3-∆D5-∆D6
x32 0 1 0 0 0 0 0 0 1 0 0 1 0 0 0 11+∆D2
x14 -1 0 0 0 0 -1 1 1 1 1 -1 0 0 0 0 8-∆S2-∆S3-∆S4+∆D2 +∆D3+∆D4+∆D5+∆D6
x36 0 1 0 0 1 0 0 -1 -1 -1 -1 -1 1-∆S4+∆D6
x33 [-1] -1 -1 -1 -1 0 1 0 0 0 0 0 1 0 0 -9-∆S2+∆D3
Cost 0 3 3 10 3 1 6 7 2 10 8 7 12 12 7
VB
VNB
NSK x21 x22 x24 x25 x26 x31 x13 x16 x34 x15 x41 x42 x43 x44 x45
x23 1 1 1 1 1 22+∆S2
x35 1 0 0 0 0 1 1 24+∆D5
x46 1 1 1 1 1 14+∆S4
x11 1 1 1 10+∆D1
x12 -1 0 -1 0 0 -1 1 1 [-1] 1 -1 0 0 -1 0 -12-∆S2-∆S3-∆S4 +∆D2 +∆D3+∆D5+∆D6 x32 1 1 1 0 0 1 -1 -1 1 -1 1 1 0 1 0 23+∆S2+∆S3+∆S4 -∆D3-∆D5-∆D6
x14 1 1 1 20+∆D4
x36 0 1 0 0 1 0 0 -1 -1 -1 -1 -1 1-∆S4 +∆D6
x33 -1 -1 -1 -1 -1 0 1 0 0 0 0 0 1 0 0 -9-∆S2+∆D3
Tabel 14 Tabel Optimal
VB
VNB
NSK x33 x22 x24 x25 x26 x31 x13 x16 x12 x15 x41 x42 x43 x44 x45
x23 1 0 0 0 0 0 1 0 0 0 0 0 1 0 0 13+∆D3
x35 1 0 0 0 0 1 1 24+∆D5
x46 1 1 1 1 1 14+∆S4
x11 1 -1 -1 -1 -1 1 1 0 0 0 1 0 1 0 0 1-∆S2+∆D1+∆D3 x34 1 -1 0 -1 0 1 0 -1 -1 -1 1 0 1 1 0 3+∆S3+∆S4-∆D2
-∆D5-∆D6
x32 0 1 0 0 0 0 0 0 1 0 0 1 0 0 0 11+∆D2
x14 -1 1 1 1 1 -1 0 1 1 1 -1 0 -1 0 0 17-∆S3-∆S4+∆D2 +∆D4+∆D5+∆D6
x36 0 1 0 0 1 0 0 -1 -1 -1 -1 -1 1-∆S4+∆D6
x21 -1 -1 -1 -1 -1 0 1 0 0 0 0 0 1 0 0 9+∆S2-∆D3
Diperoleh matriks basis B yang berukuran mxn-1, yaitu matriks koefisien pembatas khusus untuk variabel basis. Kolom ke-j dari matriks ini merupakan kolom
untuk variabel basis ke-j. Pada persoalan ini, karena veriabel basisnya adalah :
23 35 46 11 34 32 14 36 21 x x x x X x x x x x =
B maka
1 0 0 0 0 0 0 0 1
0 1 0 0 1 1 0 1 0
0 0 1 0 0 0 0 0 0
0 0 0 1 0 0 0 0 1
0 0 0 0 0 1 0 0 0
1 0 0 0 0 0 0 0 0
0 0 0 0 1 0 1 0 0
0 1 0 0 0 0 0 0 0
0 0 1 0 0 0 0 1 0
= Β
Hasil optimal dinyatakan dalam bentuk tabel transportasi sebagai berikut :
1 17
18
9 13
22
11 3 24 1
39
14
14
10 11 13 20 24 15
Berdasarkan hasil di atas diperoleh solusi dan nilai optimal adalah
*
23 35 46 11 34 32 14 36 21
( , , , , , , , , )
( 13, 24, 14, 1, 3, 11, 17, 1, 9 )
x = x x x x x x x x x
= Β * 1095 Z = 12
10 13 8 14 19
15 18 12 16 19 20
17 16 13 14 10 18
Hasil ini memberikan nilai yang sama bila menyelesaikan persoalan dengan
menggunakan program QM (pada lampiran). Dari tabel optimal tersebut maka
diperoleh matriks basis invers Β−1, yaitu:
∆ ∆ ∆ ∆ ∆S2 S3 S4 D1 D2 ∆D3 ∆D4 ∆D5 ∆D6
2 3 4 1 1 2 3 4 5 6
0 0 0 0 0 1 0 0 0
0 0 0 0 0 0 0 1 0
0 0 1 0 0 0 0 0 0
1 0 0 1 0 1 0 0 0
0 1 1 0 1 0 0 1 1
0 0 0 0 1 0 0 0 0
0 1 1 0 1 0 1 1 1
0 0 1 0 0 0 0 0 1
1 0 0 0 0 1 0 0 0
S S S D D D D D D − ∆ ∆ ∆ − ∆ = − − − ∆ ∆ − − ∆ ∆ − − ∆ Β
3.2 Analisis Sensitivitas
Andaikan terjadi perubahan pada beberapa supply dan demand sebagai berikut :
1 2 3 4
1 2 3 4 5 6
4, 1, 3, 2,
2, 2, 1, 1, 7, 1
S S S S
D D D D D D
∆ = ∆ = ∆ = − ∆ = −
∆ = ∆ = − ∆ = ∆ = ∆ = − ∆ =
Maka dengan menggunakan kalkulus diferensial diperoleh persamaan sebagai berikut:
* * * * * *
*
1 3 4 1 4 5
1 3 4 1 4 5
i i i i i i
i
B B B B B B
x x x x x x
x S S S D D D
S S S D D D
∂ ∂ ∂ ∂ ∂ ∂ ∆ = ∆ + ∆ + ∆ + ∆ + ∆ + ∆ ∂ ∂ ∂ ∂ ∂ ∂ Β Atau * * * * * * *
,1 1 ,2 3 ,3 4 ,4 1 ,5 4 ,6 5
i i i i i i i
x y S y S y S y D y D y D
∆ Β = ∆ + ∆ + ∆ + ∆ + ∆ + ∆
*
23 0(1) 0( 3) 0( 2) 0(2) 0(2) 1(1) 0(1) 0( 7) 0(1) 1
x
∆ = + − + − + + + + + − + =
*
35 0(1) 0( 3) 0( 2) 0(2) 0(2) 0(1) 0(1) 1( 7) 0(1) 7
x
∆ = + − + − + + + + + − + = −
*
46 0(1) 0( 3) 1( 2) 0(2) 0(2) 0(1) 0(1) 0( 7) 0(1) 2
x
∆ = + − + − + + + + + − + = −
*
11 1(1) 0( 3) 0( 2) 1(2) 0(2) 1(1) 0(1) 0( 7) 0(1) 2
x
∆ = − + − + − + + + + + − + =
*
34 0(1) 1( 3) 1( 2) 0( 2) 1(2) 0(1) 0(1) 1( 7) 1(1) 1 x
∆ = + − + − + + − + + + − − + − = −
*
32 0(1) 0( 3) 0( 2) 0(2) 1(2) 0(1) 0(1) 0( 7) 0(1) 2
x
∆ = + − + − + + + + + − + =
*
14 0(1) 1( 3) 1( 2) 0( 2) 1(2) 0(1) 1(1) 1( 7) 1(1) 2
x
∆ = + − − + − − + + + + + − + =
*
36 0(1) 0( 3) 1( 2) 0(2) 0(2) 0(1) 0(1) 0( 7) 1(1) 3
x
∆ = + − + − − + + + + + − + =
*
21 1(1) 0( 3) 0( 2) 0(2) 0(2) 1(1) 0(1) 0( 7) 0(1) 0
x
∆ = + − + − + + + − + + − + =
Diperoleh solusi optimal yang baru adalah:
*
23 23 35 35, 46 46, 11 11 34 34 32 32 14 14 36 36 21 21
( , , , , , , )
(13 1, 24 7, 14 2, 1 2, 3 1, 11 2, 17 2, 1 3, 9 0)
(14, 15, 12, 3, 2, 9, 19, 4, 9)
B
x = x + ∆x x + ∆x x + ∆x x + ∆x x + ∆x x + ∆x x + ∆x x + ∆x x + ∆x
= + − − + − + + + +
=
dan nilai optimal :
'
14(12) 17(10) 12(13) 3(10) 2(14) 13(16) 19(8) 4(18) 9(15)
168 170 156 30 28 208 152 18 135
1065
Z = + + + + + + + +
= + + + + + + + +
=
Diperoleh bahwa, perubahan pada supply dan demand diatas mengurangi biaya
transportasi sebesar * '
1095 1063 30
Z Z Z
∆ = − = − = . Selanjutnya akan dicari
batasan maksimum perubahan untuk masing –masing sumber.
Untuk S1
* * * * *
23 35 46 11 34
1 1 1 1 1
* * * *
32 14 36 21
1 1 1 1
1 7 2 1 2 1 1
; ; ; ; ;
4 4 4 2 4 2 4
2 1 2 1 3 0
; ; ; 0
4 2 4 2 4 4
dx dx dx dx dx
dS dS dS dS dS
dx dx dx dx
dS dS dS dS
− − −
= = = = − = = =
= = = = = = =
1
24 96 14 3
min , 28, 12
7 7 1 1
4 2 4
S − − − ∆ ≤ = = = − − − 1 12 S ∆ ≤
* * * * *
23 35 46 11 34
2 2 2 2 2
* * * *
32 14 36 21
2 2 2 2
1 7 2 2 1
1 ; 7 ; 2; 2; 1;
1 1 1 1 1
2 2 3 0
2; 2; 3; 0
1 1 1 1
dx dx dx dx dx
dS dS dS dS dS
dx dx dx dx
dS dS dS dS
− − −
= = = = − = = − = = = = −
= = = = = = = =
2
24 24 14 3
min , 7, 3
7 7 2 1
S − − −
∆ ≤ = = = − − − 2 3 S ∆ ≤
Untuk S3
* * * * *
23 35 46 11 34
3 3 3 3 3