LAMPIRAN A
Sintaks Program Sistem Autotracking pada Stasiun Pengirim
#include <TinyGPS++.h> #include <SoftwareSerial.h> #include <RF24Network.h> #include <RF24.h>
#include <SPI.h> #include "printf.h" #include <Wire.h>
#include <Adafruit_BMP085.h>
Adafruit_BMP085 bmp;
static const int RXPin = 3, TXPin = 4; // GPS connections (RX pin connects to TX on module and other wise) static const uint32_t GPSBaud = 9600; // GPS Baud Rate
SoftwareSerial ss(RXPin, TXPin); // The serial connection to the GPS device TinyGPSPlus gps; // The TinyGPS++ object
// BMP Altitude[0]
double myAlt[1]; //current BMP height // GPS Latitude[0]/Longitude[1]
RF24 radio(7,8); // nRF24L01 radio attached (CE, CSN) RF24Network network(radio); // Network uses that radio const uint16_t channel = 60; // Channel of our node const uint16_t this_node = 1; // Address of our node const uint16_t other_node = 0; // Address of the base
unsigned long packets_sent; // How many packets have we sent already
// Structure of our payload, limited to 32 bytes struct payload_t // 32 bytes max
{
unsigned long counter; // 4 bytes double lat; // 4 bytes double lng; // 4 bytes double Altitude; // 4 bytes };
void setup() {
Serial.begin(9600); Wire.begin();
ss.begin(GPSBaud); // start Software Serial bmp.begin();
SPI.begin(); radio.begin();
network.begin(channel, this_node); }
Serial.println(F("No GPS detected: check wiring.")); while(true);
} } } }
if (gps.location.isValid()) {
myLL[0] = gps.location.lat(); myLL[1] = gps.location.lng();
myAlt[0]= bmp.readAltitude(101500); printf("Altitude = ");
void sendPayload() //kirim data yang telah terbaca {
payload_t payload = {packets_sent++, myLL[0], myLL[1], myAlt[0]}; RF24NetworkHeader header(/*to node*/ other_node);
bool ok = network.write(header,&payload,sizeof(payload));
radio.powerDown(); // Power down the radio. Note that the radio will get powered back up on the next write() call.
}
unsigned long start = millis();
Sintaks Program Sistem Autotracking pada Stasiun Penerima
static const uint32_t GPSBaud = 9600;
Servo myservo; Servo myservo1;
LiquidCrystal_I2C lcd(0x27, 20, 4); Adafruit_BMP085 bmp;
TinyGPSPlus gps;
SoftwareSerial ss(RXPin, TXPin);
double x1,x2,y1,y2,a,b,c,alt1,alt2; double sudut,jarak,sudut_elevasi;
RF24 radio(7,8);
RF24Network network(radio); // Network uses that radio const uint16_t channel = 60; // Channel of our node const uint16_t this_node = 0; // Address of our node const uint16_t other_node = 1; // Address of the other node
unsigned long packets_sent; // How many packets have we sent already
// GPS Latitude[0];Longitude[1] double setLL[2]; //stored location
double myLL[2]; //current GPS location double setAlt[1]; //stored altitude
// Structure of our payload, limited to 32 bytes
myservo.attach(9); //azimuth myservo.write(180);
delay(900);
delay(900);
network.begin(channel,this_node);
Wire.begin(); // Start the I2C interface.
compass = HMC5883L(); // Construct a new HMC5883 compass. error = compass.SetScale(1.3); // Set the scale of the compass.
if(error != 0) // If there is an error, print it out. Serial.println(compass.GetErrorText(error));
// Set the measurement mode to Continuous
error = compass.SetMeasurementMode(Measurement_Continuous); if(error != 0) // If there is an error, print it out.
Serial.println(compass.GetErrorText(error));
void loop() {
ss.begin(9600); //GPS on delay(10);
network.update(); //pump the radio network regularly delay(100);
//latitude, longitude & altitude stasiun penerima--- x1 = gps.location.lat();
y1 = gps.location.lng();
alt1 = bmp.readAltitude(101500);
Serial.print("x1 : "); Serial.println(x1,6); Serial.print("y1 : "); Serial.println(y1,6); Serial.print("alt1 : "); Serial.println(alt1); smartDelay(100);
//---
x2 = setLL[0]; Serial.print("alt2 : "); Serial.println(alt2);
//latitude, longitude & altitude stasiun pengirim---
ss.end(); //GPS off
//kompas---
MagnetometerRaw raw = compass.ReadRawAxis(); MagnetometerScaled scaled = compass.ReadScaledAxis();
int MilliGauss_OnThe_XAxis = scaled.XAxis;// (or YAxis, or ZAxis) float heading = atan2(scaled.YAxis, scaled.XAxis);
float declinationAngle = 0.0457; heading += declinationAngle;
if(heading > 2*PI) heading -= 2*PI;
lcd.print(headingDegrees);
lcd.setCursor(15,2); lcd.print("elv");
lcd.setCursor(15,3); lcd.print(sudut_elevasi);
if (headingDegrees >=100 && headingDegrees <= 110) // ----> badan stasiun penerima ke arah TIMUR
myservo.detach();
if (millis() > 5000 && gps.charsProcessed() < 10)
Serial.println(F("No GPS data received: check wiring"));
{
c = c*(-1); }
sudut = round(atan(c)*180/3.14159265); delay(10);
Serial.print("sudut : "); Serial.println(sudut);
sudut_elevasi = round(atan(t_per_j)*180/3.14159265);
}
// This custom version of delay() ensures that the gps object is being "fed". static void smartDelay(unsigned long ms)
{
{
RF24NetworkHeader header;
payload_t payload={packets_sent++, myLL[0], myLL[1], myAlt[0]}; bool done = false;
while (!done) {
done = network.read(header,&payload,sizeof(payload)); setLL[0] = payload.lat;
setLL[1] = payload.lng; setAlt[0]= payload.Altitude;
printf(" Alt: ",setAlt[0],6); Serial.print(setAlt[0],6);
printf(" Lat: ",setLL[0],6); Serial.print(setLL[0],6);
Serial.print(setLL[1],6); printf("\n");
LAMPIRAN B
Diagram Alir Sistem Autotracking Sudut Elevasi
LAMPIRAN C
Tabel hasil pengujian autotracking sudut azimuth pertama
No
Latitude Longitude Latitude Longitude
1 3.557109 98.658201 3.557471 98.658882 62° 63° 1°
Grafik hasil pengujian autotracking sudut azimuth pertama
Tabel hasil pengujian autotracking sudut azimuth kedua
Latitude Longitude Latitude Longitude
1 3.557109 98.658201 3.556967 98.659556 96° 95° 1°
Grafik hasil pengujian autotracking sudut azimuth kedua
Tabel hasil pengujian autotracking sudut azimuth ketiga
Latitude Longitude Latitude Longitude
1 3.557109 98.658201 3.556495 98.659558 114° 112° 2°
Grafik hasil pengujian autotracking sudut azimuth ketiga
Tabel hasil pengujian autotracking sudut elevasi pertama
Grafik hasil pengujian autotracking sudut elevasi pertama
Tabel hasil pengujian autotracking sudut elevasi kedua
Grafik hasil pengujian autotracking sudut elevasi kedua
Tabel hasil pengujian autotracking sudut elevasi ketiga
Grafik hasil pengujian autotracking sudut elevasi ketiga
DAFTAR PUSTAKA
[1] Ramadhani Purba, Zhuhri. 2015. “Rancang Bangun Sistem Autotracking
Antena Unidirectional Menggunakan Data GPS”. Universitas Sumatera Utara. Medan
[2] Fadilah, Ryandika. 2015. “Rancang Bangun Sistem Autotracking Antena Yagi
untuk Frekuensi Kerja 2.4 GHz”. Universitas Sumatera Utara. Medan.
[3] Cakra Megasakti, Muhammad. 2010. “Rancang Bangun AutoTracking Dengan
Menggunakan Microcontroller, GPS, Sat Finder Dan Digital Compass Untuk Sinkronisasi Azimuth Antena Terhadap Satelit Cakrawarta-2. Universitas Indonesia. Depok.
[4] Balanis, Constantine A. 2005. Antenna Theory : Analysis and Design. 3 rd Edition. US: John Wiley & Sons
[5] Alaydrus, Mudrik. 2011. Antena Prinsip dan Aplikasi. Yogyakarta: Graha Ilmu
[6] Siregar, Mutiara Sofia. 2009. “Rancang Bangun Antena Wajanbolik 2,4 Ghz
Untuk Jaringan Wireless LAN”. Laporan Tugas Akhir. Universitas
Sumatera Utara.
[7] Wowok.2008. Antena Wireless Untuk Rakyat.Yogyakarta: Andi
[8] Marito, Ingot. 2008. “Sistem Navigasi Helikopter Berdasarkan Data Posisi
Secara Telemetri”. Laporan Tugas Akhir. Universitas Indonesia.
[9] Rochmah. 2006. “Sistem Navigasi GPS untuk penerbangan masa depan”. Laporan Tugas Akhir. Universitas Indonesia
[10] Diktat Kuliah.”Sistem Kendali”.Departemen Teknik Elektro, Fakultas Teknik,
[11] Artanto, Dian. 2012. Interaksi Arduino dan LabVIEW. Jakarta : PT. Elex Media Komputindo.
[12] Sidharta, Himawan. 2009. “Rancang Bangun Perangkat Lunak Sistem
Autotracking Satellite Antenna Mobile”. Universitas Indonesia. Depok
[13] Rahmat, Edy. 2015. “Implementasi Dan Analisis Kinerja Sistem Automatic Tracking Control Polarisasi Antena Penerima Frekuensi 433 Mhz
Berbasis GPS”. Laporan Tugas Akhir. Universitas Telkom
BAB III
METODOLOGI PENELITIAN
3.1 Umum
Pada Bab 3 ini dilakukan perancangan sistem autotracking pada antena stasiun penerima dengan frekuensi kerja 2,4GHz berdasarkan data sudut azimuth dan elevasi. Gambar 3.1 adalah diagram alir dari tahapan-tahapan penelitian.
1. Pemodelan sistem autotracking
Pada tahap ini dilakukan pemodelan sistem autotracking untuk mengetahui komponen-komponen penyusun dari sistem autotracking pada penelitian ini, baik secara perangkat keras maupun secara perangkat lunak.
2. Penentuan komponen penyusun sistem
Pada tahap ini dilakukan pemilihan perangkat yang dibutuhkan berdasarkan model sistem autotracking yang telah dibuat.
3. Pengujian perangkat elektronika stasiun pengirim dan stasiun penerima Pada tahap ini dilakukan pengujian dari tiap-tiap komponen elektronika yang dibutuhkan sistem untuk memeriksa berfungsi atau tidaknya komponen-komponen tersebut menggunakan mikrokontroler arduino. 4. Perancangan perangkat elektronika pada stasiun pengirim dan stasiun
penerima
Pada tahap ini dilakukan penggabungan semua perangkat elektronika dalam satu rangkaian elektronika untuk masing-masing stasiun. Kemudian membuat program sistem komunikasi antara stasiun pengirim dan stasiun penerima menggunakan mikrokontroler arduino.
5. Perancangan sistem mekanika pengendali antena pada stasiun penerima Pada tahap ini dilakukan perancangan sistem aktuator pengendali antena agar antena dapat berotasi pada sudut azimuth dan elevasi.
6. Perancangan program sistem autotracking
3.2 Gambaran Rancangan Sistem
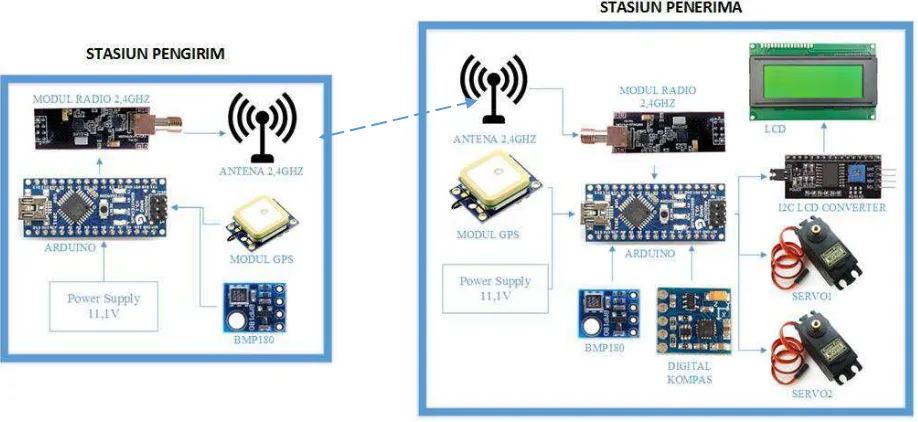
Pada Tugas Akhir ini dirancang sebuah sistem autotracking antena stasiun penerima pada frekuensi kerja 2,4GHz berdasarkan data sudut azimuth dan elevasi menggunakan mikrokontroler arduino. Sistem ini terdiri dari 2 buah komponen utama yaitu stasiun pengirim dan stasiun penerima dimana stasiun pengirim dapat berpindah posisi dan ketinggian (dinamis) ketika sedang mengirimkan data ke stasiun penerima yang posisi dan ketinggiannya tetap (statis). Maka untuk memaksimalkan penerimaan data dari stasiun pengirim, antena pada stasiun penerima harus dapat berotasi mengarahkan dirinya agar linear terhadap posisi dan ketinggian stasiun pengirim secara terus-menerus. Gambar 3.2 menunjukkan gambaran umum sistem autotracking.
Secara umum, sistem ini dimulai ketika perangkat diberi catu daya. Ketika sistem dihidupkan, sensor ketinggian akan membaca data ketinggian stasiun pengirim dan GPS akan menerima data lokasi (latitude dan longitude) stasiun pengirim dari satelit.
Data yang telah diperolah oleh kedua perangkat tersebut kemudian dikirim ke mikrokontroler arduino dimana kedua data tersebut digabungkan dan diteruskan oleh arduino ke modul radio yang bekerja pada frekuensi 2,4GHz. Data yang diterima modul radio kemudian ditransmisikan menuju stasiun penerima menggunakan antena omnidireksional. Sinyal-sinyal yang ditransmisikan oleh antena stasiun pengirim ditangkap oleh antena unidireksional pada stasiun
penerima yang kemudian diteruskan ke mikrokontroler arduino melalui modul radio 2,4GHz.
Pada stasiun penerima, sensor ketinggian akan membaca data ketinggian stasiun penerima dan GPS akan menerima data lokasi (latitude dan longitude) stasiun penerima dari satelit. Kedua perangakat kemudian mengirimkan data-data tersebut ke arduino. Modul digital kompas mendeteksi posisi derajat stasiun penerima terhadap sumbu utara. Kemudian arduino nano mengumpulkan semua data yang telah diterima dan dikirimkan ke modul LCD agar ditampilkan data latitude dan longitude stasiun pengirim, data latitude dan longitude stasiun
penerima, ketinggian stasiun pengirim terhadap stasiun penerima, dan sudut kompas. Hasil perhitungan sudut azimuth dan elevasi pada Arduino Nano akan dikirimkan menuju motor servo agar motor servo dapat mengarahkan antena stasiun penerima ke arah lokasi stasiun pengirim. Diagram alir sistem secara keseluruhan dapat dilihat pada Lampiran B.
3.3 Komponen Penyusun Sistem
sensor ketinggian, antena omnidireksional, antena unidireksional, modul LCD, LCD I2C shield, kompas analog, baterai, dan motor servo. Maka, dibutuhkan pemilihan tipe perangkat yang sesuai dengan kebutuhan sistem autotracking.
3.3.1 Arduino Nano 3.x.
Arduino Nano adalah salah satu varian dari produk board mikrokontroler keluaran Arduino. Arduino Nano adalah board Arduino yang berukuran kecil, menggunakan mikrokontroler Atmega 328 untuk Arduino Nano 3.x dan Atmega168 untuk Arduino Nano 2.x. Varian ini mempunyai rangkaian yang sama dengan jenis Arduino Duemilanove, tetapi dengan ukuran dan desain PCB yang berbeda. Arduino Nano tidak dilengkapi dengan soket catu daya, tetapi terdapat pin untuk catu daya luar atau dapat menggunakan catu daya dari mini USB port. Arduino Nano didesain dan diproduksi oleh Gravitech. Gambar 3.3 menunjukan bentuk fisik Arduino Nano. Adapun spesifikasi singkat mengenai Arduino Nano 3.x. adalah sebagai berikut :
a. Mikrokontroler : Atmega328
j. SRAM : 2 KB
k. EEPROM : 1 KB
l. Clock Speed : 16 MHz
Gambar 3.3 Arduino Nano
Dengan sistem yang terdiri dari modul radio, modul GPS, sensor tekanan, motor servo, dan LCD, menggunakan Arduino Nano 3.x. sudah cukup untuk kebutuhan sistem ini. Pemilihan Arduino Nano 3.x. didasarkan pada banyaknya pin input dan output yang dibutuhkan.
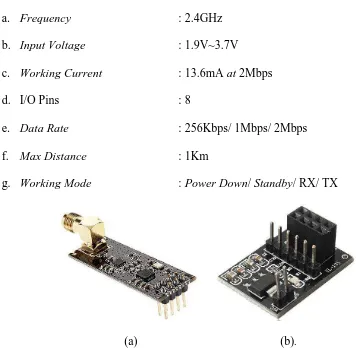
3.3.2 Modul Radio nRF24L01
Modul radio nRF24L01 adalah modul RF keluaran terbaru dari SparkFun. Modul ini menggunakan transceiver 2,4GHz dari Nordic Semiconductor. Modul ini memiliki konektor antena eksternal jenis SMA untuk memaksimalkan transmisi data. Modul ini juga memiliki fitur PA (Power Amplifier) dan LNA (Low Noise Amplifier) yang menambah jarak jangkauan sinyal antena.
karena itu dibutuhkan regulator tegangan agar nRF24L01 dapat bekerja. Bentuk fisik modul ini dapat dilihat pada Gambar 3.4.
Adapun spesifikasi dari modul radio nRF24L01 sebagai berikut :
a. Frequency : 2.4GHz
b. Input Voltage : 1.9V~3.7V c. Working Current : 13.6mA at 2Mbps
d. I/O Pins : 8
e. Data Rate : 256Kbps/ 1Mbps/ 2Mbps f. Max Distance : 1Km
g. Working Mode : Power Down/ Standby/ RX/ TX
(a) (b).
Gambar 3.4 (a) Modul nRF24L01 dan (b) regulator 5V to 3.3V
3.3.3 Antena Rubber Duck 2,4GHz
Antena rubber duck adalah salah satu jenis antena omnidireksional. Antena ini bekerja pada frekuensi 2.4GHz menggunakan konektor tipe SMA. Gambar 3.5 adalah bentuk fisik antena rubber duck 2,4GHz.
Gambar 3.5 Antena rubber duck 2.4GHz
Alasan memilih antena ini adalah karena sistem autotracking membutuhkan tipe antena omnidireksional di sisi stasiun pengirim. Antena ini juga sudah termasuk dalam produk modul radio nRF24L01 sehingga memang dipergunakan untuk modul radio nRF24L01.
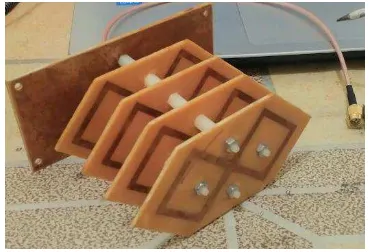
3.3.4 Antena Biquad-Yagi 2,4GHz
Antena Biquad-Yagi adalah penggabungan antara antena Biquad dan antena Yagi-Uda. Antena ini bekerja pada frekuensi 2.4GHz dan merupakan salah satu jenis antena unidireksional. Gambar 3.6 Menunjukkan bentuk antena Biquad-Yagi.
Alasan memilih antena ini adalah karena antena biquad-yagi adalah jenis antena unidireksional, dimana antena jenis ini dibutuhkan pada stasiun penerima agar memiliki jangkauan sinyal yang jauh.
3.3.5 Modul GPS UBlox NEO-6M
Modul GPS dengan tipe NEO-6 adalah sebuah modul penerima data GPS produksi Ublox AG. Modul ini menggunakan komunikasi UART dengan protokol NMEA 0183 dengan pilihan nilai baudrate yang bervariasi antara lain 4800, 9600, dan 38400. Tegangan masukan yang dapat diberikan antara 3,3 – 5 Volt. Tingkat keakurasian modul ini adalah 3 – 6 meter. Gambar 3.7 menunjukkan bentuk dari modul GPS Ublox NEO-6M.
Gambar 3.7 Modul GPS Ublox NEO-6M
Modul GPS ini dipilih karena modul ini adalah salah satu modul GPS yang memiliki akurasi yang baik dan dimensi yang tidak terlalu besar.
3.3.6 Sensor BMP180
BMP180 adalah sensor tekanan barometrik (digital barometric pressure sensor) dari Bosch Sensortec yang berkinerja sangat tinggi yang dapat
meter. Sensor ini hanya membutuhkan 0.3 uA sehingga sangat menghemat baterai. Gambar 3.8 menunjukkan tampilan dari sensor BMP180.
Fitur BMP180:
a. 1.8V to 3.7V Supply Voltage
b. Low power consumption – 0.5uA at 1Hz c. I2C interface
d. Max I2C Speed: 3.6Mhz
e. Very low noise – up to 0.02hPa (17cm) f. Full calibrated
g. Pressure Range: 300hPa to 1100hPa (+9000m to -500m) h. Weight: 1.18g
i. Size: 21mm x 18mm
Gambar 3.8 Sensor BMP180
Pemilihan sensor dengan tipe ini didasarkan dengan kemampuannya yang cukup handal. Selain itu, kemudahan dalam koneksi dengan Arduino melalui protokol I2C juga menjadi alasan dipilihnya sensor BMP180. Pustaka yang banyak memudahkan pemrograman sensor ini.
3.3.7 Digital Kompas Gy-271
akurat. Sensor pada modul ini mengkonversi semua gaya magnetis di sekitarnya menjadi keluaran tegangan diferensial dalam 3 sumbu. Bentuk dari modul ini dapat dilihat pada Gambar 3.9.
Spesifikasi : a. Power 3V~5V DC b. Chipset HMC5883L
c. Communication via I2C protocol d. Measuring range : 1.3-8 Gauss
Gambar 3.9 Digital kompas Gy-271
Pemilihan modul kompas ini didasarkan pada akurasi yang baik dan pembacaan data yang cukup stabil.
3.3.8 Motor Servo Tower Pro MG995
MG-995 adalah Motor Servo DC yang banyak digunakan pada aplikasi RC model. Dengan torsi 10 kg.cm, motor servo ini cukup bertenaga untuk berbagai macam aplikasi yang membutuhkan motor dengan torsi memadai. Seri MG995 adalah versi lebih baru dibanding pendahulunya, MG946. Gambar 3.10 menunjukkan motor servo Tower Pro MG995.
a. Modulasi : Analog b. Torsi : 10 kg.cm
c. Kecepatan : 0,16 detik / 60° (pada 6 Volt) d. Kecepatan reaksi : 53 - 62 rpm
e. Dimensi : 40,6 x 19,8 x 42,9 mm (berat 55g) f. Tipe gir : Metal
g. Rentang Rotasi : 180°
h. Siklus pulsa 20 ms dengan lebar pulsa ±1,5 ms
i. Catu daya 4,8 ~ 7,2 Volt DC (tipikal 6V, 4x baterai 1,5V disusun seri) j. Tipe konektor : JR Futaba
Gambar 3.10 Motor servo Tower Pro MG995
Alasan pemilihan motor servo tipe ini adalah karena servo ini memiliki badan yang kokoh, dimana dibutuhkan pada sistem autotracking agar lebih kuat menopang antena stasiun penerima.
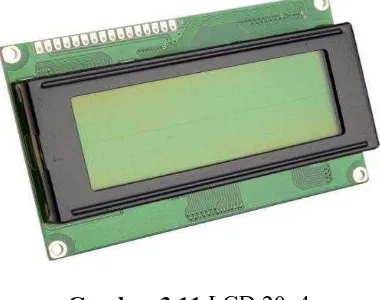
3.3.9 LCD 20x4
beserta rangkaian pendukungnya. LCD mempunyai pin data, kontrol catu daya, dan pengatur kontras tampilan. Modul LCD ini mampu menampilkan karakter sebanyak 20 karakter per baris dengan jumlah baris 4. Gambar 3.11 adalah tampilan modul LCD 20x4.
Gambar 3.11 LCD 20x4
Pemilihan LCD tipe ini dikarenakan penelitian ini membutuhkan tampilan data yang cukup banyak agar memudahkan penelitian. Data yang ingin ditampilkan pada LCD adalah data latitude dan longitude dari stasiun pengirim, data latitude dan longitude dari stasiun penerima, ketinggian stasiun pengirim terhadap stasiun penerima, serta jarak antara kedua stasiun.
3.3.10 I2C LCD Converter
Modul ini adalah sebuah shield khusus untuk modul LCD yang berfungsi untuk mengubah jenis komunikasi serial pada LCD menjadi komunikasi I2C, dengan tujuan agar menghemat pin yang dihubungkan ke pin Arduino Nano. Bentuk I2C LCD Converter dapat dilihat pada Gambar 3.12.
menggunakan shield ini, pin menuju Arduino Nano bisa diminimalisir menjadi 4 pin saja.
Gambar 3.12 I2C LCD Converter
3.3.11 Kompas Analog Novus DC-45/3A
Kompas ini digunakan untuk mengkalibrasi modul digital kompas pada agar stasiun penerima dapat mengenali posisi utara dan selatan. Kompas ini memiliki akurasi yang baik terhadap arah mata angin. Gambar 3.13 menunjukkan tampilan kompas analog.
Gambar 3.13 Kompas Analog Novus DC-45/3A
3.3.12 Baterai Turnigy 3S 2200mAh
a. Minimum Capacity : 2200mAh
b. Configuration : 3S1P / 11.1v / 3Cell c. Constant Discharge : 25C
d. Peak Discharge (10sec) : 35C e. Pack Weight : 188g
f. Pack Size : 105 x 33 x 24mm g. Charge Plug : JST-XH
h. Discharge plug : XT60
Gambar 3.14 Baterai Turnigy 3S 2200mAh
Pemilihan baterai tipe ini didasarkan pada fiturnya yang sesuai dengan kebutuhan sistem autotracking yang dirancang, pengujian penelitian membutuhkan daya tahan baterai yang cukup lama agar dapat memaksimalkan efisiensi penelitian. Gambar 3.14 menunjukkan bentuk dari baterai ini.
3.4 Perancangan Perangkat Elektronika
A. Stasiun Pengirim
Gambar 3.15 Rangkaian Skematik Stasiun Pengirim
Berikut penjelasan rangkaian pada Gambar 3.15 :
1. Arduino Nano 3.x. bertugas sebagai pusat kontrol sistem yang akan mengolah data input dan output. Arduino Nano 3.x. mendapat catuan dari baterai Turnigy 3S 2200mAh.
2. Baterai Turnigy 3S 2200mAh mencatu Arduino Nano 3.x. sebesar 11,1V menuju pin Vin.
3. Modul Radio nRF24L01 berkomunikasi dengan Arduino Nano 3.x. dengan protokol SPI (Serial Peripheral Interface). Protokol ini menggunakan empat buah pin untuk mengatur pengiriman data yaitu MOSI (Master Input Slave Output), MISO (Master Output Slave Intput), SCK (Serial Clock),
4. Sensor BMP180 berkomunikasi dengan Arduino Nano 3.x. dengan protokol I2C (Inter-Intergrated Circuit). Protokol ini menggunakan dua buah pin, yaitu SCK dan SDA. Pada Arduino Nano 3.x., protokol ini terletak pada kaki analog 4 dan 5.
5. Modul GPS berkomunikasi secara serial dengan Arduino Nano 3.x. Pin-pin yang terdapat protokol ini adalah pin Rx dan Tx yang terhubung dengan pin digital 3 dan 4 pada Arduino Nano 3.x.
6. Antena Rubber Duct terhubung langsung dengan modul radio nRF24L01 melalui konektor SMA.
B. Stasiun Penerima
Pada perancangan perangkat elektronika di stasiun pengirim, perangkat yang digunakan antara lain Arduino Nano 3.x., modul radio nRF24L01, modul GPS U-Blox Neo6, sensor BMP180, modul Digital Kompas Gy-271, LCD 20x4, LCD I2C Shield, Motor Servo Tower Pro, dan baterai Turnigy 3S 2200mAh. Gambar 3.16 Menunjukkan rangkaian skematik sistem pada stasiun pengirim.
Berikut penjelasan rangkaian pada Gambar 3.16 :
Gambar 3.16 Rangkaian Skematik Stasiun Penerima
2. Baterai Turnigy 3S 2200mAh mencatu 4 perangkat, yaitu Arduino Nano 3.x., modul radio nRF24L01, dan 2 motor servo Tower Pro MG995. Tegangan yang dicatu menuju Arduino Nano 3.x. adalah sebesar 11,1V pada pin Vin, menuju modul radio nRF24L01 dan motor servo Tower Pro MG 995 sebesar 5V pada pin Vcc.
3. Modul Radio nRF24L01 berkomunikasi dengan Arduino Nano 3.x. dengan protokol SPI (Serial Peripheral Interface). Protokol ini menggunakan empat buah pin untuk mengatur pengiriman data yaitu MOSI (Master Input Slave Output), MISO (Master Output Slave Intput), SCK (Serial Clock),
4. Modul Digital Kompas berkomunikasi dengan Arduino Nano 3.x. dengan protokol I2C (Inter-Intergrated Circuit). Protokol ini menggunakan dua buah pin, yaitu SCK dan SDA. Pada Arduino Nano 3.x., protokol ini terletak pada kaki analog 4 dan 5.
5. Seperti halnya Digital Kompas, sensor BMP180 juga menggunakan protokol I2C untuk berkomunikasi dengan Arduino Nano 3.x.
6. Modul GPS berkomunikasi secara serial dengan Arduino Nano 3.x. Pin-pin yang terdapat protokol ini adalah pin Rx dan Tx yang terhubung dengan pin digital 3 dan 4 pada Arduino Nano 3.x.
7. Motor Servo 1 dan 2 berkomunikasi secara serial dengan Arduino Nano 3.x. menggunakan pin digital 9 dan 10.
8. LCD 20x4 menggunakan komunikasi serial. Namun komunikasi ini akan diubah menjadi komunikasi I2C oleh LCD I2C Shield.
9. LCD I2C Shield mengubah komunikasi pada LCD menjadi komunikasi I2C menuju Arduino Nano 3.x. Sama seperti Digital Kompas Gy-271 dan sensor BMP180, LCD I2C Shield terhubung ke pin analog 4 dan 5 pada Arduino Nano 3.x.
10.Antena Biquad-Yagi terhubung langsung dengan modul radio nRF24L01 melalui konektor SMA.
3.5 Perancangan Sistem Aktuator
ke arah kanan dan kiri digunakan untuk sistem autotracking terhadap sudut azimuth, sedangkan satu servo yang lain akan berputar ke arah atas dan bawah
digunakan untuk sistem autotracking terhadap sudut elevasi.
(a)
(b)
Pada masing-masing aktuator dipasang tampilan busur derajat dan jarum penunjuk yang digunakan untuk proses pengukuran sudut azimuth dan elevasi. Motor servo yang digunakan pada sistem aktuator adalah motor servo 180°, sehingga tidak dapat mengarahkan antena ke arah belakang stasiun penerima secara langsung. Hal ini akan minimalisir dengan mengunakan mode utara dan selatan, namun hanya agar stasiun penerima dapat bekerja di segala arah. Konstruksi dari sistem aktuator antena dapat dilihat pada Gambar 3.17.
3.6 Perancangan Program Sistem Autotracking
Pada perancangan program autotracking ini, untuk mempermudah pemahaman diagram alir sistem akan dibagi menjadi 3, yaitu diagram alir stasiun pengirim, diagram alir azimuth, dan diagram alir elevasi. Gambar 3.18 adalah diagram alir dari program stasiun pengirim, Gambar 3.19 adalah diagram alir dari program sudut azimuth dan Gambar 3.20 adalah diagram alir dari program sudut elevasi.
1. Diagram alir stasiun pengirim
2. Diagram Alir sudut Azimuth
3. Diagram Alir Elevasi
jarak = √ + .
BAB IV
PENGUJIAN DAN ANALISA DATA
4.1 Implementasi Rancang Bangun
Pada tahap implementasi, hasil akhir dari rancang bangun adalah sistem stasiun pengirim dan sistem stasiun penerima. Stasiun pengirim terdiri dari Arduino Nano 3.x., modul radio nRF24L01, antena Rubber Duck 2,4GHz, modul GPS Ublox NEO-6M, sensor BMP180 dan baterai Turnigy 3S 2200A. Sedangkan stasiun penerima terdiri dari Arduino Nano 3.x., modul radio nRF24L01, antena Biquad-Yagi 2,4GHz, modul GPS Ublox NEO-6M, sensor BMP180, modul digital kompas Gy-271, modul LCD 20x4, I2C LCD Converter, motor servo dan baterai Turnigy 3S 2200A. Gambar 4.1 menunjukkan konstruksi dari stasiun pengirim dan stasiun penerima.
(b)
Gambar 4.1 (a) Konstruksi stasiun pengirim, dan (b) konstruksi stasiun
penerima pada sistem
Gambar 4.2 Rancangan shield dan komponen penyusun stasiun pengirim
Gambar 4.3 Rancangan shield dan komponen penyusun stasiun penerima
berkomunikasi dengan stasiun pengirim dan stasiun penerima melalui protokol serial dengan sebuah kabel USB (Universal Serial Bus).
4.2 Pengujian dan Analisis Sistem secara Keseluruhan
penerima didapatkan jarak maksimal yang dapat dijangkau oleh antena stasiun penerima sejauh ±700 meter.
Gambar 4.4 Proses kalibrasi digital kompas terhadap posisi timur
4.2.1 Pengujian Autotracking Sudut Azimuth
Gambar 4.5 Posisi stasiun penerima (RX) dan stasiun pengirim (TX) pada
pengujian autotracking sudut azimuth
Metode pengujian sistem autotracking sudut azimuth adalah sebagai berikut:
1. Stasiun penerima dihadapkan ke posisi timur sesuai dengan pembacaan modul digital kompas yang telah dikalibrasi sebelumnya, nilai pembacaan digital kompas ditampilkan di layar LCD.
2. Nilai latitude dan longitude dari kedua stasiun dimasukkan ke dalam program autotracking Arduino IDE kemudian program di-upload ke Arduino Nano pada stasiun penerima.
3. Stasiun penerima dihidupkan.
5. Jarum penunjuk pada aktuator akan menunjuk ke posisi sudut dimana antena berhenti.
6. Ukur dan catat besar sudut azimuth yang terbentuk berdasarkan nilai sudut yang ditunjuk oleh jarum penunjuk pada aktuator.
7. Stasiun penerima dimatikan.
8. Ulangi langkah ke 3 - 7 sebanyak 10 kali percobaan.
Gambar 4.6 Proses pengujian autotracking sudut azimuth di lapangan
A. Pengujian 1
Posisi stasiun penerima berada di latitude 3.557109° dan longitude 98.658201° sedangkan posisi stasiun pengirim berada di latitude 3.557471° dan longitude 98.658882°. Jarak antara kedua stasiun adalah 86,43 meter. Gambar 4.7
menunjukkan posisi sudut azimuth pada pengujian 1. Berikut adalah perhitungan sudut azimuth secara teoritis :
x2 = 3.557471 y2 = 98.658882
Gambar 4.7 Gambaran posisi sudut azimuth pada pengujian 1
Dimana untuk mendapatkan nilai A, nilai latitude stasiun pengirim dikurang nilai latitude stasiun penerima.
A = x2 – x1 = 3.557471 - 3.557109 = 0.000362
Untuk mendapatkan nilai B, nilai longitude stasiun pengirim dikurang nilai longitude stasiun penerima.
B = y2 – y1 = 98.658882 - 98.658201 = 0.000681
Karena nilai A dan B sudah diketahui, maka nilai Ø dapat dicari dengan
menggunakan rumus pythagoras sederhana. Nilai positif dan negatif dari A dan B tidak diperlukan karena yang ingin dicari adalah besar sudut azimuth yang terbentuk sehingga nilai A dan B akan dimutlakkan.
Ø = tan ⁄
Maka,
Ø = Arc tan (1.88121547)
Ø = . ° = °
Jadi, didapatkan besar sudut azimuth yang terbentuk antara posisi stasiun pengirim dan posisi stasiun penerima sebesar °. Tabel 4.1 adalah hasil pengujian sudut azimuth pada pengujian pertama.
Tabel 4.1 Hasil pengujian autotracking sudut azimuth pertama
No
Latitude Longitude Latitude Longitude
percobaan 2 dan 6 sesuai dengan hasil perhitungan, sedangkan percobaan yang lain melenceng 1° lebih besar dari hasil perhitungan.
Gambar 4.8 Grafik hasil pengujian autotracking sudut azimuth pertama
B. Pengujian 2
Posisi stasiun penerima berada di latitude 3.557109° dan longitude 98.658201° sedangkan posisi stasiun pengirim berada di latitude 3.556967° dan longitude 98.659556°. Jarak antara kedua stasiun adalah 152,46 meter. Gambar 4.9
menunjukkan posisi sudut azimuth pada pengujian 2 Berikut adalah perhitungan sudut azimuth secara teoritis :
Gambar 4.9 Gambaran posisi sudut azimuth pada pengujian 2
Dimana untuk mendapatkan nilai A, nilai latitude stasiun pengirim dikurang nilai latitude stasiun penerima.
A = x2 – x1 = 3.556967 - 3.557109 = -0.000142
Untuk mendapatkan nilai B, nilai longitude stasiun pengirim dikurang nilai longitude stasiun penerima.
B = y2 – y1 = 98.659556 - 98.658201 = 0.001355
Karena nilai A dan B sudah diketahui, maka nilai D dapat dicari dengan
menggunakan rumus pythagoras sederhana. Nilai positif dan negatif dari A dan B tidak diperlukan karena yang ingin dicari adalah besar sudut azimuth yang terbentuk sehingga nilai A dan B akan dimutlakkan.
= tan ⁄
Maka,
= tan . ⁄ .
Ø = ° − ° = °
Jadi, didapatkan besar sudut azimuth yang terbentuk antara posisi stasiun pengirim dan posisi stasiun penerima terhadap utara sebesar °. Tabel 4.2 adalah hasil pengujian sudut azimuth pada pengujian kedua.
Tabel 4.2 Hasil pengujian autotracking sudut azimuth kedua
No
Latitude Longitude Latitude Longitude
1 3.557109° 98.658201° 3.556967° 98.659556° 96° 95° 1°
Gambar 4.10 Grafik hasil pengujian autotracking sudut azimuth kedua
C. Pengujian 3
Posisi stasiun penerima berada di latitude 3.557109° dan longitude 98.658201° sedangkan posisi stasiun pengirim berada di latitude 3.556495° dan longitude 98.659558°. Jarak antara kedua stasiun adalah 166,6 meter. Gambar 4.11
menunjukkan posisi sudut azimuth pada pengujian 3 Berikut adalah perhitungan sudut azimuth secara teoritis :
Gambar 4.11 Gambaran posisi sudut azimuth pada pengujian 3
Dimana untuk mendapatkan nilai A, nilai latitude stasiun pengirim dikurang nilai latitude stasiun penerima.
A = x2 – x1 = 3.556495 - 3.557109 = -0.000614
Untuk mendapatkan nilai B, nilai longitude stasiun pengirim dikurang nilai longitude stasiun penerima.
B = y2 – y1 = 98.659558 - 98.658201 = 0.001357
Karena nilai A dan B sudah diketahui, maka nilai D dapat dicari dengan
menggunakan rumus pythagoras sederhana. Nilai positif dan negatif dari A dan B tidak diperlukan karena yang ingin dicari adalah besar sudut azimuth yang terbentuk sehingga nilai A dan B akan dimutlakkan.
= tan ⁄
Maka,
= tan . ⁄ .
= . ° = °
Ø = ° − ° = °
Jadi, didapatkan besar sudut azimuth yang terbentuk antara posisi stasiun pengirim dan posisi stasiun penerima terhadap utara sebesar °. Tabel 4.3 adalah hasil pengujian sudut azimuth pada pengujian ketiga.
Tabel 4.3 Hasil pengujian autotracking sudut azimuth ketiga
No
Latitude Longitude Latitude Longitude
1 3.557109° 98.658201° 3.556495° 98.659558° 114° 112° 2°
melenceng 1° lebih kecil dari hasil perhitungan, sedangkan percobaan yang lain melenceng 2° lebih kecil dari hasil perhitungan.
Gambar 4.12 Grafik hasil pengujian autotracking sudut azimuth ketiga
4.2.2 Pengujian Autotracking Sudut Elevasi
Pengujian autotracking sudut elevasi dilakukan di lapangan Departemen Teknik Elektro (DTE) Universitas Sumatera Utara yang berada di Jl. Politeknik. Alasan dipilihnya lokasi ini adalah karena pengujian sudut elevasi membutuhkan perbedaan ketinggian antara stasiun pengirim dan stasiun penerima dan pengujian membutuhkan kondisi LOS (Line of Sight) agar pengiriman data tidak terganggu. Gambar 4.13 adalah tampilan posisi stasiun penerima (RX) dan stasiun pengirim (TX), dimana TX1, TX2 dan TX3 berada di koordinat yang sama, yang membedakan hanya ketinggian dari stasiun pengirim. Gambar 4.14 menunjukkan proses pengujian autotracking sudut elevasi di lapangan. Untuk memaksimalkan keakuratan penelitian, dilakukan sebanyak 10 kali percobaan dengan nilai input yang sama.
Gambar 4.13 Posisi stasiun penerima (RX) dan stasiun pengirim (TX) pada
pengujian autotracking sudut elevasi
1. Stasiun penerima dihadapkan ke posisi timur sesuai dengan pembacaan modul digital kompas yang telah dikalibrasi sebelumnya, nilai pembacaan digital kompas ditampilkan di layar LCD.
2. Nilai latitude, longitude dan ketinggian dari kedua stasiun dimasukkan ke dalam program autotracking Arduino IDE kemudian program di-upload ke Arduino Nano pada stasiun penerima.
3. Stasiun penerima dihidupkan.
4. Pertama antena akan menghadap lurus ke depan, kemudian antena akan berputar ke atas dan berhenti berputar di posisi yang diperintahkan oleh program.
5. Jarum penunjuk pada aktuator akan menunjuk ke posisi sudut dimana antena berhenti.
6. Ukur dan catat besar sudut elevasi yang terbentuk berdasarkan nilai sudut yang ditunjuk oleh jarum penunjuk pada aktuator.
7. Stasiun penerima dimatikan.
8. Ulangi langkah ke 3 - 7 sebanyak 10 kali percobaan.
A. Pengujian 1
Posisi stasiun penerima berada di latitude 3.561927°, longitude 98.654806° dan berada pada ketinggian 71 meter, tepatnya di dekat lorong antara DTE dan Teknik Mesin. Sedangkan posisi stasiun pengirim berada di latitude 3.556495°, longitude 98.659589° dan berada pada ketinggian 76 meter, tepatnya di lantai 2
DTE di depan ruangan Ikatan Mahasiswa Teknik Elektro (IMTE).
Gambar 4.15 menunjukkan posisi sudut elevasi pada pengujian 1. Berikut adalah perhitungan sudut elevasi secara teoritis :
x1 = 3.561927 y1 = 98.654806 z1 = 71
x2 = 3.561932 y2 = 98.654962 z2 = 76
Gambar 4.15 Gambaran posisi sudut elevasi pada pengujian 1
Dimana untuk mendapatkan nilai jarak, digunakan persamaan Euclidean :
Untuk mendapatkan nilai A, nilai latitude stasiun pengirim dikurang nilai latitude stasiun penerima.
A = x2 – x1 = 3.561932 - 3.561927 = 0.000005
Untuk mendapatkan nilai B, nilai longitude stasiun pengirim dikurang nilai longitude stasiun penerima.
B = y2 – y1 = 98.654962 - 98.654806 = 0.000156
Karena nilai A dan B sudah diketahui, maka nilai Jarak dapat dicari :
Jarak = (√ + ) x 111.319
Jarak = (√ . + . ) x 111.319
Jarak = 0.00015608 x 111.319 Jarak = 17,37 meter
Untuk mendapatkan nilai C, nilai ketinggian stasiun pengirim dikurang nilai ketinggian stasiun penerima.
C = z2 – z1 = 76 – 71 = 5 meter
Karena nilai C dan Jarak sudah didapatkan, maka besar sudut elevasi dapat dicari menggunakan rumus pythagoras.
Ø = tan �⁄
Maka,
Ø = tan ⁄ ,
Ø = Arc tan (0.287852619)
Jadi, didapatkan besar sudut elevasi yang terbentuk antara posisi stasiun pengirim dan posisi stasiun penerima sebesar °. Tabel 4.4 adalah hasil pengujian sudut elevasi pada pengujian pertama.
Tabel 4.4 Hasil pengujian autotracking sudut elevasi pertama
Gambar 4.16 Grafik hasil pengujian autotracking sudut elevasi pertama
B. Pengujian 2
Posisi stasiun penerima berada di latitude 3.561927°, longitude 98.654806° dan berada pada ketinggian 71 meter, tepatnya di dekat lorong antara DTE dan Teknik Mesin. Sedangkan posisi stasiun pengirim berada di latitude 3.556495°, longitude 98.659589° dan berada pada ketinggian 81 meter, tepatnya di lantai 3
DTE di atas ruangan Ikatan Mahasiswa Teknik Elektro (IMTE).
Gambar 4.17 menunjukkan posisi sudut elevasi pada pengujian 2. Berikut adalah perhitungan sudut elevasi secara teoritis :
y2 = 98.654962 z2 = 81
Gambar 4.17 Gambaran posisi sudut elevasi pada pengujian 2
Dimana untuk mendapatkan nilai jarak, digunakan persamaan Euclidean :
Jarak = (√ + ) x 111.319
Untuk mendapatkan nilai A, nilai latitude stasiun pengirim dikurang nilai latitude stasiun penerima.
A = x2 – x1 = 3.561932 - 3.561927 = 0.000005
Untuk mendapatkan nilai B, nilai longitude stasiun pengirim dikurang nilai longitude stasiun penerima.
B = y2 – y1 = 98.654962 - 98.654806 = 0.000156
Karena nilai A dan B sudah diketahui, maka nilai Jarak dapat dicari :
Jarak = (√ + ) x 111.319
Jarak = (√ . + . ) x 111.319
Jarak = 0.00015608 x 111.319 Jarak = 17,37 meter
C = z2 – z1 = 81 – 71 = 10 meter
Karena nilai C dan Jarak sudah didapatkan, maka besar sudut elevasi dapat dicari menggunakan rumus pythagoras.
Ø = tan �⁄
Maka,
Ø = tan ⁄ ,
Ø = Arc tan (0.575705238) Ø = , ° = °
Jadi, didapatkan besar sudut elevasi yang terbentuk antara posisi stasiun pengirim dan posisi stasiun penerima sebesar °. Tabel 4.5 adalah hasil pengujian sudut elevasi pada pengujian kedua.
Tabel 4.5 Hasil pengujian autotracking sudut elevasi kedua
Dari tabel 4.5 didapatkan rata-rata besar sudut pengukuran sebesar 31,1° dan rata-rata kesalahan sudut sebesar 1,1°. Gambar 4.18 menunjukkan grafik hasil pengukuran autotracking sudut elevasi kedua. Grafik berwarna biru adalah grafik hasil perhitungan sedangkan grafik berwarna merah adalah grafik hasil pengukuran. Pada grafik tersebut dapat dilihat bahwa hasil pengukuran dari percobaan 3 sesuai dengan hasil perhitungan, kemudian percobaan 1, 4, 5, 6, 8, 9 dan 10 melenceng 1° lebih besar dari hasil perhitungan, serta percobaan 2 dan 7 melenceng 2° lebih besar dari hasil perhitungan.
Gambar 4.18 Grafik hasil pengujian autotracking sudut elevasi kedua
C. Pengujian 3
DTE. Gambar 4.19 menunjukkan posisi sudut elevasi pada pengujian 3. Berikut adalah perhitungan sudut elevasi secara teoritis :
x1 = 3.561927 y1 = 98.654806 z1 = 71
x2 = 3.561932 y2 = 98.654962 z2 = 86
Gambar 4.19 Gambaran posisi sudut elevasi pada pengujian 3
Dimana untuk mendapatkan nilai jarak, digunakan persamaan Euclidean :
Jarak = (√ + ) x 111.319
Untuk mendapatkan nilai A, nilai latitude stasiun pengirim dikurang nilai latitude stasiun penerima.
A = x2 – x1 = 3.561932 - 3.561927 = 0.000005
Untuk mendapatkan nilai B, nilai longitude stasiun pengirim dikurang nilai longitude stasiun penerima.
B = y2 – y1 = 98.654962 - 98.654806 = 0.000156
Jarak = (√ + ) x 111.319
Jarak = (√ . + . ) x 111.319
Jarak = 0.00015608 x 111.319 Jarak = 17,37 meter
Untuk mendapatkan nilai C, nilai ketinggian stasiun pengirim dikurang nilai ketinggian stasiun penerima.
C = z2 – z1 = 86 – 71 = 15 meter
Karena nilai C dan Jarak sudah didapatkan, maka besar sudut elevasi dapat dicari menggunakan rumus pythagoras.
Ø = tan �⁄
Maka,
Ø = tan ⁄ ,
Ø = Arc tan (0.86357858)
Ø = , ° = °
Jadi, didapatkan besar sudut elevasi yang terbentuk antara posisi stasiun pengirim dan posisi stasiun penerima sebesar °. Tabel 4.6 adalah hasil pengujian sudut elevasi pada pengujian ketiga.
Tabel 4.6 Hasil pengujian autotracking sudut elevasi ketiga
5 71 86 17,37 41° 41° 0°
Dari tabel 4.6 didapatkan rata-rata besar sudut pengukuran sebesar 40,8° dan rata-rata kesalahan sudut sebesar 0,2°. Gambar 4.20 menunjukkan grafik hasil pengukuran autotracking sudut elevasi ketiga. Grafik berwarna biru adalah grafik hasil perhitungan sedangkan grafik berwarna merah adalah grafik hasil pengukuran. Pada grafik tersebut dapat dilihat bahwa hasil pengukuran dari percobaan 3 dan 4 melenceng 1° lebih kecil dari hasil perhitungan, sedangkan percobaan yang lain sesuai dengan hasil perhitungan.
Gambar 4.20 Grafik hasil pengujian autotracking sudut elevasi ketiga
BAB V
PENUTUP
5.1 Kesimpulan
Berdasarkan hasil pembahasan pada bab 4, maka dapat dibuat kesimpulan sebagai berikut:
1. Sistem autotracking antena stasiun penerima berhasil dirancang meskipun tetap memiliki kesalahan keakuratan pengarahan.
2. Sistem ini memiliki kelemahan yaitu tidak dapat melakukan autotracking dengan sudut pengarahan 360°.
3. Didapatkan rata-rata besar kesalahan sudut pengarahan antena pada sudut azimuth sebesar 0,8° pada pengujian pertama, 1° pada pengujian kedua dan
1,8° pada pengujian ketiga.
4. Didapatkan rata-rata besar kesalahan sudut pengarahan antena pada sudut elevasi sebesar 0,4° pada pengujian pertama, 1,1° pada pengujian kedua dan 0,2° pada pengujian ketiga.
5.2 Saran
Adapun saran bagi penelitian berikunya adalah :
1. Penelitian dapat dikembangkan dengan menggunakan motor servo 360° agar antena dapat melakukan autotracking ke segala arah secara kontinyu. 2. Pada pengembangan berikutnya, peneliti dapat mengunakan jenis antena
BAB II
LANDASAN TEORI
2.1 Antena
Antena adalah perangkat media transmisi wireless (nirkabel) yang memanfaatkan udara atau ruang bebas sebagai media penghantar. Antena mempunyai fungsi untuk merubah energi elektromagnetik terbimbing menjadi gelombang elektromagnetik ruang bebas (gelombang mikro) yang merupakan fungsi antena sebagai transmitter(Tx). Energi listrik dari transmitter dikonversi menjadi gelombang elektromagnetik dan oleh sebuah antena yang kemudian gelombang tersebut dipancarkan menuju udara bebas. Pada receiver(Rx) akhir gelombang elektromagnetik dikonversi menjadi energi listrik dengan menggunakan antena. Gambar 2.1 menunjukkan antena sebagai pengirim dan penerima[2].
Gambar 2.1 Antena sebagai pengirim dan penerima
2.1.1 Parameter Karakteristik Antena
2.1.1.1Direktivitas
Keterarahan dari suatu antena didefinisikan sebagai ’’perbandingan antara
intensitas radiasi maksimum dengan intensitas radiasi dari antena referensi isotropis”. Keterarahan dari sumber non-isotropis adalah sama dengan
perbandingan intensitas radiasi maksimumnya di atas sebuah sumber isotropis[4]. Keterarahan pada antena secara umum dinyatakan dari Persamaan 2.1[4]:
= . 4.�. ���
��� (2.1)
Dimana :
= directivity (dB)
= intensitas radiasi maksimum (watt)
= daya radiasi total (watt)
2.1.1.2Gain
Gain (directive gain) adalah karakter antena yang terkait dengan kemampuan antena mengarahkan radiasi sinyalnya atau penerimaan sinyal dari arah tertentu. Gain bukanlah kuantitas yang dapat diukur dalam satuan fisis pada umumnya seperti watt, ohm, atau lainnya, melainkan suatu bentuk perbandingan. Oleh karena itu, satuan yang digunakan untuk gain adalah decibel [7].
Gain dari sebuah antena adalah kualitas nyala yang besarnya lebih kecil daripada penguatan antena tersebut yang dapat dinyatakan pada Persamaan 2.2[5]
Gain = G = k.D (2.2)
Dimana :
Gain dapat dihitung dengan membandingkan kerapatan daya maksimum antena yang diukur dengan antena referensi yang diketahui gainnya. Maka dapat dituliskan pada Persamaan 2.3 [4]:
= ���� � �
���� � (2.3)
Atau jika dihitung dalam nilai logaritmik dirumuskan oleh Persamaan 2.4 [4]:
= [ − ] + (2.4)
Dimana :
= Gain total antena
= Nilai level sinyal maksimum yang diterima antena terukur (dBm) = Nilai level sinyal maksimum yang diterima antena referensi (dBm)
= Gain antena referensi
2.1.1.3Pola Radiasi
Ø, ɵ dan , Ø, ɵ dimana r adalah radius radiasi, Ø adalah lebar sudut radiasi terhadap azimuth, dan ɵ adalah lebar sudut radiasi terhadap elevasi.
Gambar 2.2 Sistem koordinat untuk menganalisis antena
2.1.1.4Beamwidth
Beamwidth adalah besamya sudut berkas pancaran gelombang frekuensi
radio utama (main lobe) yang dihitung pada titik 3 dB menurun dari puncak lobe utama [2]. Besarnya beamwidth dapat dihitung dengan persamaan 2.5[6] :
= .�, (2.5)
Dimana :
Bw = 3 dB beamwidth (derajat) f = frekuensi (GHz)
Gambar 2.3 menunjukkan tiga daerah pancaran yaitu lobe utama (main lobe, nomor 1), lobe sisi samping (side lobe, nomor 2) dan lobe sisi belakang (back lobe, nomor 3).
Gambar 2.3 Beamwidth antena
Half Power Beamwidth (HPBW) adalah daerah sudut yang dibatasi oleh
titik-titik setengah daya atau -3 dB atau 0.707 dari medan maksimum pada lobe utama. First Null Beamwidth (FNBW) adalah besar sudut bidang diantara dua arah pada main lobe yang intensitas radiasinya nol.
2.1.1.5Bandwidth
Bandwidth suatu antena didefinisikan sebagai rentang frekuensi dimana
kerja yang berhubungan dengan berapa karakteristik (seperti impedansi masukan, pola, beamwidth, polarisasi, gain, efisiensi, VSWR, return loss, axial ratio) memenuhi spesifikasi standar [4]. Gambar 2.4 menunjukkan bandwidth antena.
Dari Gambar 2.4 diketahui f1 adalah frekuensi bawah, f2 adalah frekuensi atas dan fc merupakan frekuensi tengah. Dengan melihat Gambar 2.4 bandwidth dapat dicari dengan menggunakan Persamaan 2.6 [5] :
% = − % (2.6)
Bandwidth yang dinyatakan dalam persen seperti ini biasanya digunakan
untuk menyatakan bandwidth antena yang memiliki band sempit (narrow band). Sedangkan untuk band yang lebar (broad band) biasanya digunakan definisi rasio antara batas frekuensi atas dengan frekuensi bawah.
2.1.1.6Voltage Standing Wave Ratio (VSWR)
VSWR adalah perbandingan antara amplitudo gelombang berdiri (standing wave) maksimum (|V|max) dengan minimum (|V|min). Pada saluran transmisi ada
dua komponen gelombang tegangan, yaitu tegangan yang dikirimkan ( +) dan tegangan yang direfleksikan ( −). Pebandingan tegangan yang direfleksikan dengan yang dikirimkan disebut sebagai koefisien refleksi tegangan (Γ) yang dapat dicari dengan Persamaan 2.7 [8] :
Γ = �− �+ =
�− �
�+ � (2.7) di mana � adalah impedansi beban (load) dan adalah impedansi saluran. Rumus untuk mencari VSWR dituliskan pada Persamaan 2.8 [4] :
= | || | � = +|Γ|−|Γ| (2.8)
kenyataannya sulit diperoleh. Oleh karena itu, nilai standar VSWR yang diijinkan dalam perancangan antena adalah < 2.
2.1.2 Antena Omnidireksional
Antena omnidireksional adalah sebuah perangkat antena yang mampu mengirim dan menerima sinyal ke dan dari segala arah. Antena jenis ini memiliki sudut pancaran (beamwidth) yang besar, namun memiliki jarak jangkauan yang kecil. Antena omnidireksional biasanya digunakan untuk keperluan hotspot atau access point karena cocok untuk hubungan komunikasi point-to-multi-point. Pola
radiasi dari antena omnidireksional berbentuk seperti donat, seperti yang ditunjukkan oleh Gambar 2.5. Contoh dari antena omnidireksional yaitu antena ¼ lamda, antena monopole, antena rubber duck, dan lain-lain.
Gambar 2.5 Pola radiasi antena omnidireksional
2.1.3 Antena Unidireksional
antena ini lebih banyak digunakan untuk koneksi jarak jauh. Dengan kemampuan direktivitas ini membuat antena mampu mendengar sinyal yang relatif kecil dan mengirimkan sinyal lebih jauh. Umumnya antena unidireksional mempunyai spesifikasi gain tinggi tetapi beamwidth kecil. Hal ini menguntungkan karena kecilnya beamwidth menyebabkan berkurangnya derau yang masuk kedalam antena. Semakin kecil bidang tangkapan(aperture), semakin naik selektivitas antena terhadap sinyal wireless yang berarti semakin sedikit derau yang ditangkap oleh antena tersebut[7].
Beberapa macam antena unidireksional antara lain antena Yagi-Uda, antena parabola, antena helix, antena biquad, antena log-periodik, dan lain-lain. Gambar 2.6 menunjukkan pola radiasi dari antena unidireksional.
Gambar 2.6 Pola radiasi antena unidireksional
2.2 Azimuth dan Elevasi
Azimuth ialah sudut dalam derajat yang diukur sepanjang garis horizon,
Elevasi (altitude) ialah sudut yang diukur sepanjang garis vertikal, antara horizon dengan target. Secara teori, elevasi dapat bernilai positif dan negatif, namun pada prakteknya nilai negatif tidak mungkin ditemui, karena hal itu berarti target berada di bawah garis horizon (di bawah permukaan bumi). Gambar 2.7 menunjukkan posisi dari sudut azimuth dan elevasi.
Gambar 2.7 Posisi sudut azimuth dan elevasi
Karena sudut azimuth dan elevasi terbentuk dari posisi stasiun pengirim dan stasiun penerima, maka dapat digunakan persamaan segitiga pythagoras untuk menentukan besar sudut azimuth maupun sudut elevasi.
Gambar 2.8 Merupakan segitiga siku-siku. Jika kita ingin mencari besar sudut di titik A, maka dapat dinyatakan pada Persamaan 2.9 [14] :
= tan ⁄ (2.9)
2.2.1 GPS (Global Positioning System)
GPS adalah sistem satelit navigasi dan penentuan posisi global yang dimungkinkan dengan beroperasinya satelit penentu posisi milik negara Amerika Serikat. Asalnya adalah NAVSTAR GPS (Navigation Satelite Timing and Ranging Global Positioning System), yang kemudian disingkat GPS merupakan sistem radio
navigasi satelit yang dikembangkan oleh United State Departement of Defense (DoD) untuk keperluan militer dalam penentuan posisi, kecepatan dan waktu secara teliti dalam segala cuaca pada sembarang waktu dimuka bumi (darat, laut dan udara). Selanjutnya dengan persetujuan US Congress, GPS kemudian dikembangkan untuk keperluan non–militer. Secara Teknis GPS adalah perpaduan satelit dan receiver yang mampu menunjukkan dan mencatat posisi suatu obyek dimuka bumi secara global.
Gambar 2.9 Sistem kordinat latitude dan longitude
Dari berbagai format penulisan koordinat, ada tiga macam format koordinat yang dipakai pada GPS sebagai titik penentu lokasi suatu area, yakni[9]:
1. Koordinat yang mengandung derajat (degree), menit (minutes), dan detik (seconds), disebut juga DMS.
Format: derajat menit detik koma detik (dd mm ss.ss) Contoh: 40:26:46.302N 79:56:55.903W
Arti: Pada Lintang Utara (Latitude North) 40 derajat 26 menit 46,302 detik, Pada Bujur Barat (Longitude West) 79 derajat 56 menit 55,903 detik.
2. Koordinat yang mengandung derajat (degree) dan menit (minutes), disebut juga MinDec.
Format: derajat menit koma menit (dd mm.mmmm) Contoh: 76° 77.4564, -54° 34.5657
Arti : Pada Lintang Utara 76 derajat 77,4564 menit, Pada Bujur Barat 54 derajat 34,5657 menit.
3. Koordinat yang mengandung derajat saja (DegDec) Format: derajat koma derajat (dd.dddddd)
Arti: Pada Lintang Selatan 6, 257508 derajat, Pada Bujur Timur 106,745980 derajat.
2.2.2 Teorema Euclidean Distance
Euclidean distance adalah perhitungan jarak dari 2 buah titik dalam
Euclidean space. Euclidean space diperkenalkan oleh Euclid, seorang
matematikawan dari Yunani sekitar tahun 300 B.C.E. untuk mempelajari hubungan antara sudut dan jarak. Euclidean ini berkaitan dengan Teorema Phytagoras dan biasanya diterapkan pada 1, 2 dan 3 dimensi. Gambar 2.10 menunjukkan jarak antara dua titik koordinat. Untuk mencari jarak antara dua titik dinyatakan pada Persamaan 2.10 [14]:
= √ − + − (2.10)
Dimana :
Teori ini dapat digunakan untuk mencari jarak antara dua buah koordinat latitude dan longitude yang dapat dilihat pada Persamaan 2.11 [14]:
= √ � − � + � − � (2.11)
Hasil perhitungan dari persamaan jarak diatas masih dalam satuan decimal degree (sesuai dengan format latitude dan longitude yang digunakan) sehingga
untuk menyesuaikannya perlu dikalikan dengan 111,319 km (1 derajat bumi = 111,319 km) agar satuannya berubah menjadi km.
2.3 Dasar Teori Sistem Kontrol
Sistem kendali dapat didefinisikan sebagai hubungan antara komponen yang membentuk sebuah konfigurasi sistem, yang akan menghasilkan tanggapan sistem yang diharapkan. Jadi harus ada yang dikendalikan, yang merupakan suatu sistem fisis, yang biasa disebut dengan kendalian (plant).
Masukan dan keluaran merupakan variabel atau besaran fisis. Keluaran merupakan hal yang dihasilkan oleh kendalian, artinya yang dikendalikan; sedangkan masukan adalah yang mempengaruhi kendalian, yang mengatur keluaran.
A. Sistem kendali lup terbuka
Gambar 2.11 Blok diagram sistem kendali open loop
B. Sistem kendali lup tertutup
Sistem kendali lup tertutup adalah sistem kendali yang mempunyai umpan balik, yang berfungsi untuk mengamati keluaran yang terjadi untuk dibandingkan dengan masukannya (yang diinginkan). Gambar 2.12 menunjukkan bentuk diagram blok sistem kendali close loop.
Gambar 2.12 Blok diagram sistem kendali close loop
2.4 Arduino
Arduino didefinisikan sebagai sebuah platform elektronik yang open source, berbasis pada sofwtare dan hardware yang fleksibel dan mudah digunakan,
yang ditujukan untuk para seniman, desainer, hobbies, dan setiap orang yang tertarik dalam membuat objek atau lingkungan yang interaktif[11].
Integrated Development Environment). Gambar 2.13 menujukkan tampilan dari
beberapa Arduino.
Gambar 2.13 Jenis-jenis Arduino
Kelebihan Arduino dari platform hardware mikrokontroler lainnya adalah: 1. IDE Arduino merupakan multiplatform, yang dapat dijalankan di
berbagai sistem operasi, seperti Windows, Macintosh, dan Linux. 2. IDE Arduino dibuat berdasarkan pada IDE Processing, yang sederhana
sehingga mudah digunakan.
3. Pemrograman Arduino menggunakan kabel yang terhubung dengan port USB, bukan port serial. Fitur ini berguna karena banyak komputer
yang sekarang ini tidak memiliki port serial.
4. Arduino adalah hardware dan software open source. 5. Biaya hardware cukup murah.
6. Proyek Arduino ini dikembangkan dalam lingkungan pendidikan, sehingga bagi pemula akan lebih cepat dan mudah mempelajarinya. 7. Memiliki begitu banyak pengguna dan komunitas di internet yang dapat
Arduino menggunakan software processing yang digunakan untuk menulis program kedalam arduino. Processing arduino merupakan penggabungan antara bahasa C++ dan Java. Gambar 2.14 menunjukkan tampilan utama software Arduino IDE. Software Arduino IDE ini dapat di-install di berbagai Operating System (OS) seperti : LINUX, Mac OS, Windows. Software Arduino IDE terdiri dari 3 bagian :
1. Editor program, sebuah window yang memungkinkan pengguna menulis dan mengedit program dalam bahasa processing.
2. Compiler, modul yang berfungsi mengubah bahasa processing (kode
program) ke dalam kode biner karena kode biner adalah satu-satunya bahasa program yang dipahami oleh mikrokontroller.
3. Uploader, modul yang berfungsi memasukkan kode biner kedalam mikorokontroler. Struktur perintah pada arduino secara garis besar terdiri dari dua bagian yaitu void setup dan void loop. Void setup berisi perintah yang akan dieksekusi hanya satu kali sejak arduino dihidupkan sedangkan void loop berisi perintah yang akan dieksekusi berulang ulang selama
arduino dinyalakan.
2.5 Tracking Antena
Pergerakan muatan dapat menimbulkan masalah pada sisi stasiun bumi. Hal ini terjadi karena untuk dapat menerima data dengan baik, stasiun bumi harus terarah ke muatan. Oleh karena itu, antena stasiun bumi harus memiliki mount yang dapat digerakkan dan sistem tracking. Mount antena yang biasa digunakan adalah EL/AZ mount yang memungkinkan antena untuk digerakkan ke arah atas- bawah dan kiri-kanan. Sistem tracking diperlukan pada situasi dimana sebuah jaringan komunikasi mengharuskan level sinyal yang diterima dan yang dikirimkan berada didalam batas tertentu. Sistem tracking akan mencari arah sinyal terkuat yang dikirimkan oleh muatan sehingga memungkinkan antena stasiun bumi untuk pointing ke muatan [12].
BAB I
PENDAHULUAN
1.1 Latar Belakang Penulisan
Kebutuhan dan perkembangan sistem tracking antena pada komunikasi point-to-point semakin meningkat, salah satunya adalah untuk kepentingan
pemantauan cuaca pada suatu wilayah tertentu menggunakan kendaraan udara (aerial vehicle). Komunikasi point-to-point dengan jarak yang jauh membutuhkan gain antena yang tinggi sehingga memperkecil lebar berkas (beamwidth) antena. Oleh karena itu, dibutuhkan sistem tracking antena pada stasiun penerima yang dapat mengatur pergerakan antena secara otomatis agar tetap mengarah ke target yang terus berpindah. Untuk meningkatkan keakuratan sistem autotracking diperlukan data sudut azimuth dan elevasi dari target terhadap antena stasiun penerima.
Penelitian tentang autotracking antenna sudah banyak dilakukan diantaranya adalah rancang bangun sistem autotracking antena unidirectional menggunakan data GPS [1], rancang bangun sistem autotracking antena yagi untuk frekuensi kerja 2.4 GHz [2] dan rancang bangun autotracking dengan menggunakan microcontroller, GPS, sat finder dan digital compass untuk sinkronisasi azimuth antena terhadap Satelit Cakrawarta-2 [3].
pergerakan antena secara otomatis agar tetap mengarah ke target yang terus berpindah.
1.2 Rumusan Masalah
Adapun rumusan masalah dari Tugas Akhir ini adalah sebagai berikut: 1. Bagaimana merancang sistem autortracking agar antena stasiun penerima
dapat senantiasa terarah ke stasiun pengirim secara horizontal dan vertikal, sehingga stasiun penerima dapat menerima data yang dikirimkan dengan baik.
2. Bagaimana merancang sistem autotracking antena dengan berdasarkan pada data sudut azimuth dan elevasi dari posisi stasiun pengirim terhadap posisi stasiun penerima.
3. Seberapa baik kinerja sistem autotracking yang berhasil dirancang dalam menjalankan fungsinya.
1.3 Tujuan Penulisan
Adapun tujuan dari usulan penelitian ini adalah merancang bangun sistem autotracking pada antena Biquad-Yagi yang mempunyai frekuensi operasi 2,4 GHz
berdasarkan data sudut azimuth dan elevasi agar dapat mendeteksi dan mengarahkan antena stasiun penerima ke stasiun pengirim secara akurat.
1.4 Batasan Masalah
Agar penulisan ini sesuai dengan tujuan, maka batasan masalah pada penelitian ini adalah: