UNIVERSITI TEKNIKAL MALAYSIA MELAKA
DESIGN AND DEVELOPMENT OF PNEUMATIC GRIPPER
FOR COMAU ROBOT
This report submitted in accordance with the requirements of the Universiti Teknikal Malaysia Melaka (UTeM) for the Bachelor Degree of Manufacturing Engineering
(Robotic and Automation) with Honours.
By
MOHD NAZILI BIN YAACOB
DECLARATION
I, hereby, declared this report entitled “Design and Development of Pneumatic Gripper for COMAU Robot” is the result of my own research except as cited
references.
Signature : ………..
Author’s Name : MOHD NAZILI BIN YAACOB
APPROVAL
This report is submitted to the Faculty of Manufacturing Engineering of UTeM as partial fulfillments for the degree of Bachelor of Manufacturing Engineering (Robotic and Automation) with Honours. The member of supervisory committee is as follow:
……….. (Pn. Syamimi binti Shamsuddin)
Main Supervisor
ABSTRACT
ABSTRAK
DEDICATION
ACKNOWLEDGEMENT
5.1.1 Result and Observation 95
5.2 Gripping Test 97
5.2.1 Block Shape Test 97
5.2.2 Cylindrical Shape Test 98
5.2.3 Spherical Shape Test 99
5.2.4 Result and Observation 100
5.3 Discussion 104
6. CONCLUSION AND SUGGESTIONS FOR FUTURE WORKS 107
REFERENCES 109
APPENDICES
A. Detail Drawing and Documentation B. Programming
LIST OF TABLES
1.1 Gantt chart for PSM 1 4
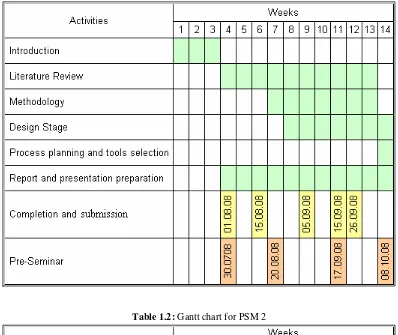
1.2 Gantt chart for PSM 2 4
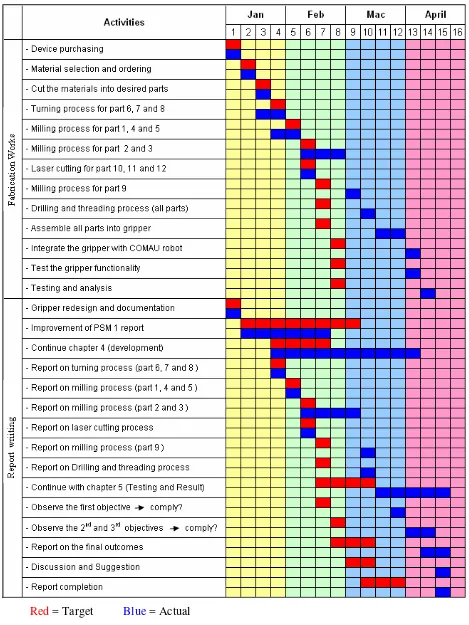
1.3 Detail plan for fabrication works and report writing in PSM 2 5
2.1 Classification of gripper comprising 4 gripper categories 34
2.2 Selection consideration of gripper 36
2.3 The specification of the current pneumatic gripper 52
4.1 Pugh method for choosing the best design. 72
4.2 Description of gripper parts 74
4.4 Information of the pneumatic cylinder 75
4.3 List of materials 76
5.9 Gripping the block shape object 100
5.10 Gripping the cylindrical shape object. 101
5.11 New gripper’s jaw design. 102
5.12 Gripper’s jaw design without V-shape grove. 102
5.13 Gripping the spherical shape object 103
5.14 Comparison between gripping a golf ball and tennis ball 104
5.15 The fitting of the pneumatic cylinder 104
5.16 The movable jaw slant while gripping the ball. 105
CHAPTER 1
INTRODUCTION
1.1 Background
finishing this project includes machine design, applied mechanic, programming, fabricating and material selection.
1.2 Problem Statement
1.4 Project Scope
This project is focused in designing and developing a new pneumatic based gripper that can grasp a bigger size object with efficient grip and can reduce impact to the object. The gripper will be designed using Solidwork software, the 3D software that can design, simulate, and analyze the material properties use in producing the gripper before being fabricate. This gripper will than be integrated with COMAU robot in robotic laboratory for pick and place of two or more shapes of object. In order to design and develop the gripper, a further study on the current gripper available in robotic laboratory on how it mechanism and characteristics should be conducted. At the end of the development process, testing will be carrying out to analyze whether the gripper can work properly or not.
1.5 Benefit of project
By the end of this project, hopefully the following benefits can be achieved:
(a) Improving the grasping mechanism of the current gripper to be more efficient and safe.
(b) Can grip various type of material shapes compare to the current robot gripper in FKP’s robotic laboratory.
1.6 Project Planning
Table 1.1 shows the Gantt chart for activities in PSM 1 and Table 1.2 shows the Gantt chart for activities in PSM 2. Table 1.3 shows the detail plan (weekly target) for fabrication works (including testing and analysis) and report writing in PSM 2.
Table 1.1: Gantt chart for PSM 1
Table 1.3: Detail Plan for fabrication works and report writing in PSM 2
CHAPTER 2
LITERATURE REVIEW
This chapter discusses about information related to this project in order to give well understanding and good review about things that are crucially needed. This chapter also includes the study on the existing robot gripper available with the COMAU robot in FKP’s robotic laboratory. Beside that, the previous research from other people that related with this project also stated.
2.1 Definition of Robot
Robot is a computer-controlled machine that can be programmed to accomplish different task autonomously (Manseur, 2006). Different researchers divide the robot into different categories. International Federation of Robotic, et al. (2005) divided robot into two types which is service robot and industrial robot. According to their definition, service robot is a robot which operated semi or autonomously to perform services useful to the well-being of humans and equipment, excluding manufacturing operation and industrial robot is an automatically controlled, reprogrammable, multipurpose manipulator programmable in three or more axes, which may be either fixed in place or mobile for use in industrial automation applications.
This research will go into detail concerning industrial robot because this project is as a re-programmable multifunctional manipulator design to move material, parts, tools, or specialized devices through variable programmed motions for performance of a variety of task (McDonald, 1989 cited in Man Zhihong, 2004, p.1).
The most common anthropomorphic characteristic of industrial robot is mechanical arm or commonly called robot manipulator, which is use to performed various industrial tasks. Industrial robots are classified base on several characteristic. According to Richard and Andrew (1994), the most common general characteristic that is take consideration in classify an industrial robots are; arm configuration, number of axes (degree of freedom), load-carrying capability, work envelope, control system, power source, speed of movement, repeatability, accuracy, and reliability.