96 | SEMNASKIT 2015/ ISSN : 2477-5649
Kecerdasan Buatan
Diagonal Recurrent Neural Network (DRNN)
Untuk Pengendalian Motor Induksi
pada Mobil Listrik Multi – Penggerak
Dedy Kurnia Setiawan
*1, Suprihadi Prasetyo, Luqman Hakim Afandy, Bambang S Kaloko
#Jurusan Teknik Elektro Universitas Jember
Jalan Kalimantan 37 Jember
Abstract
Pada makalah ini dijelaskan sebuah strategi untuk mengembangkan model kontrol mobil listrik multi penggerak yang berbasis Neural Network. Kecepatan dan beban yang berubah-ubah dipetakan dari model aliran daya listrik menjadi model dengan menggunakan diagonal recurrent neural network (DRNN) untuk proses sinkronisasi antar penggerak. Dengan menggunakan pelatihan menggunakan DRNN maka perbedaan kecepatan antar penggerak dan arus yang meangalir pada masing-masing motor akibat beban fluktuatif yang digunakan oleh mobil listrik dapat segera diketahui. Oleh sebab itu antar-penggerak akan tetap sinkron tanpa ada selip kecepatan pada kedua penggerak. Berdasarkan pada hasil simulasi diketahui bahwa saat kondisi steady state, kontroller DRNN menghasilkan selisih kecepatan antar-motor lebih kecil jika dibandingkan ketika sistem menggunakan kontroller PI. selisih sekitar 2 rad/detik saat menggunakan kontroller DRNN, dan 7 rad/detik pada PI.
Keywords— motor induksi, multi penggerak, diagonal recurrent neural network.
I. PENDAHULUAN
Mobil yang digerakkan dengan mesin bakar akan menghasilkan emisi gas buang yang berpotensi menimbulkan polusi udara sebagaimana disampaikan oleh Environmental Protection Agency (EPA). Gas buang yang dihasilkan oleh mobil dengan mesin bakar terdiri dari 18% partikel padat, 27% merupakan campuran bahan mudah menguap (terdiri 28% Pb, 32% NO dan 62% CO) serta CO2 sebanyak 25% [1]. Polusi udara berdampak pada lingkungan dan kesehatan manusia [2][3].
Dalam dunia transportasi, mobil listrik menjadi pilihan utama yang mampu menjawab permasalahan pemerintah tentang bahan bakar yang mulai habis. Dengan menggunakan mobil listrik, lingkungan akan terhindar dari polusi terutama di daerah perkotaan. Umumnya mobil listrik ini menggunakan satu penggerak, penggerak yang berada pada
roda belakang saja atau roda depan saja. Hal itu mengakibatkan motor bekerja lebih berat disaat beban berubah-ubah. Untuk itu perlu dikembangkan sebuah mobil listrik dengan multi penggerak yang terkontrol dan bekerja secara independen. Proses penyesuaian kecepatan untuk sistem multi penggerak ini membutuhkan koordinasi, sehingga setiap penggerak akan bekerja sesuai dengan kontrol yang sudah ditentukan.
Mobil listrik dengan 2 penggerak memiliki beberapa masalah tentang pembebanan yang fluktuatif. Ketika salah satu motor mendapatkan beban yang membuat kecepatan motor tersebut tidak dapat mencapai kecepatan referensi. Hal ini dapat menyebabkan adanya slip antara motor satu dengan motor dua. Untuk mengatasi masalah tersebut dibutuhkan pengaturan kecepatan untuk setiap motor yang memiliki beban yang berbeda-beda.
97 | SEMNASKIT 2015/ ISSN : 2477-5649 penggerak memiliki beban yang fluktuatif. Motor induksi
akan mendapat tegangan sesuai dengan beban. Untuk mengatur tegangan masukan dibutuhkan konverter daya. Suatu perangkat konverter daya yang digunakan untuk mengkonversikan sumber DC menjadi sumber AC dengan mengatur tegangan dan frekuensi adalah inverter. Inverter dapat digunakan sebagai pengganti sumber PLN untuk mensuplai perangkat elektronik yang membutuhkan sumber AC. Berdasarkan sumber yang digunakan, inverter dibagi menjadi dua jenis yaitu Voltage Source Inverter (VSI) dan Current Source Inverter (CSI).
Dalam kenyataannya, motor induksi 3 fasa masih memiliki kelemahan. Motor induksi masih belum bisa mempertahankan kecepatan putar. Ketika beban berubah, motor induksi tidak mampu mempertahankan kecepatannya. Seperti halnya pada sebuah roda berjalan (Conveyor) yang banyak digunakan di bidang industri. Alat tersebut membutuhkan kecepatan yang konstan untuk setiap perubahan beban yang diterima. Selain itu juga ada eskalator yang membutuhkan kecepatan yang konstan setiap membawa beban atau pun tidak berbeban. Untuk mengatasi permasalahan tersebut maka dibutuhkan sebuah pengontrol yang mampu mempertahankan kecepatan motor induksi saat berbeban maupun tidak berbeban. Beberapa penelitian yang berhubungan dengan kontrol motor induksi multi penggerak telah dilakukan, diantaranya adalah :
Ashish Chourasia, et all, 2014, mengatur kontrol kecepatan motor induksi dengan vektor kendali motor induksi memberikan salah satu yang paling cocok dan teknik kontrol kecepatan saat ini populer digunakan. Teknik kontrol skalar yang tersedia disebaliknya yang sederhana tetapi memiliki kopling untuk menerapkan efek lamban pada akhirnya bertanggung jawab atas respon sistem yang dibuat lebih lanjut yang rentan terhadap ketidakstabilan sistem pada sistem ini menggunakan pengendalian vektor dengan pengendali PI dengan fluks estimasi oleh dua metode dan analisis yang berbeda [4]. Penelitian serupa juga dilakukan oleh peneliti lain yang mayoritas teknik pengendalian motor induksi masih banyak yang menggunakan kontroller PI dalam mengatur switching inverter [5]-[11]. Dengan kontroller PI, inverter tidak dapat secara otomatis melakukan penyesuaian jika terjadi perubahan parameter beban pada sistem.
Metode jaringan syaraf tiruan merupakan metode yang mampu mempelajari setiap variasi kecepatan motor induksi untuk menghasilkan sistem kontrol yang sesuai agar motor induksi berada pada kondisi kecepatan konstan meskipun motor dibebani dengan beban fluktuatif maupun dinamis.
Pada sistem kontrol jaringan syaraf tiruan yang menggunkan keluaran kecepatan motor sebagai masukannya disebut sebagai Close Loop Kontroller. Hal inilah yang akan dibahas dalam penelitian ini, yaitu pengendalian motor induksi 3 fasa untuk sistem multi penggerak dengan sumber inverter menggunakan jaringan syaraf tiruan.
II. MOTOR INDUKSI MULTI-PENGGERAK
Desain yang digunakan untuk untuk dapat mengendalikan motor induksi multi penggerak pada mobil listrik ditunjukkan pada gambar 1.
Gambar 1. Rancangan model penelitian
A. Kontrol Mobil Listrik Multi Penggerak
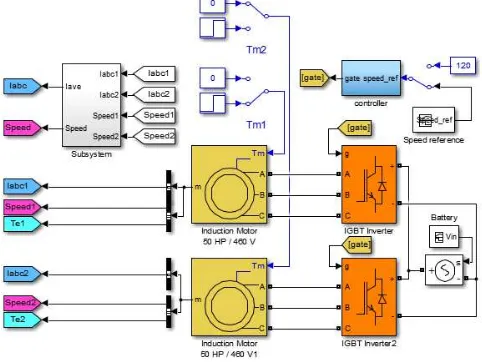
Berdasarkan pada gambar 1, dirancang dan diaplikasikan dalam MATLAB seperti yang ditunjukkan pada gambar 2. Sistem terdiri atas dua buah motor induksi 3 fasa dengan spesifikasi yang sama. Kedua motor ini diletakkan pada penggerak roda depan samping kiri (motor 1) dan samping kanan (motor 2).
Gambar 2. Sistem Mobil Listrik Multi-Penggerak
Pengendalian mobil listrik multi penggerak yang diusulkan dengan menggunakan metode jaring saraf tiruan DRNN seperti terlihat pada Gambar 4.
98 | SEMNASKIT 2015/ ISSN : 2477-5649 digunakan metode lain sebagai pembanding. Metode yang
dipilih adalah metode dengan menggunakan kontrol PI konvensional (gambar 4).
Gambar 3. Kontrol Mobil Listrik Multi Penggerak
Gambar 4. Kontrol PI Konvensional
B. Kontroller DRNN
Struktur DRNN secara umum merupakan artificial neural network (ANN) dua layer dengan umpan balik dari output layer pertama ke input layer pertama. Layer pertama adalah hidden (recurrent) layer yang tersusun atas neuron-neuron dengan fungsi alih nonlinier. Layer kedua adalah output-layer yang tersusun atas neuron-neuron dengan fungsi alih linier. Struktur DRNN diperlihatkan dalam Gambar 5 [12].
yi(n)
Gambar 5. Struktur DRNN
Neuron self-recurrent adalah neuron yang mempunyai umpan balik dari output neuron itu sendiri. RNN yang tersusun atas neuron-neuron self-recurrent, dinamakan sebagai Diagonal Recurrent Neural Network (DRNN). Jika dibadingkan dengan fullyconected recurrent neural network,
struktur DRNN lebih sederhana dan jumlah bobot yang digunakan lebih sedikit, sehingga beban komputasi menjadi lebih ringan [12].
Untuk hidden layer yang mempunyai neuron sebanyak j, matrik bobot masukan dan matrik bobot recurrent pada saat n masing-masing dinyatakan sebagai wijl1 (n) dan wj(n), maka nilai neuron ke-j dirumuskan :
)
dengan yj(n-1) menyatakan koneksi recurrent dari neuron ke-j dalam hidden layer, dan yj(0)=0. Tiap-tiap neuron dalam hidden layer mempunyai fungsi alih nonlinier. Keluaran dari hidden layer pada saat n dirumuskan
(
)
)
(
n
f
s
n
y
j
j (4)Untuk output layer yang mempunyai neuron sebanyak k dengan fungsi alih linier, matrik bobot keluaran wjk(n), maka keluaran dari output layer dirumuskan sebagai
)
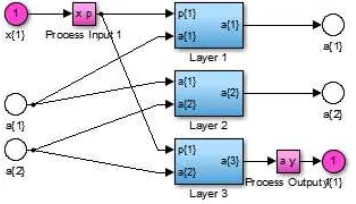
Pada sistem kontrol ini input kontroller DRNN berasal dari nilai kecepatan pada kedua motor dan kecepatan referensi, sedangkan outputnya adalah sinyal referensi torka elektris. Kontroller DRNN terdiri atas 3 layer dengan jumlah neuron yang digunakan masing-masing adalah 10-10-1 seperti yang ditunjukkan pada Gambar 6.
Gambar 6. Struktur DRNN dengan tiga layer pada kendali multi-penggerak
99 | SEMNASKIT 2015/ ISSN : 2477-5649 (a)
(b)
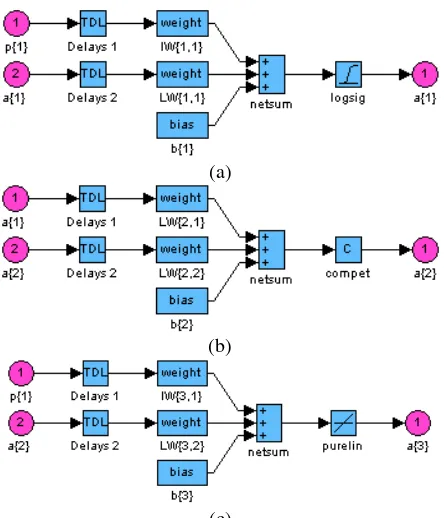
(c)
Gambar 7. Diagram layer DRNN, (a) layer 1, (b) layer 2, (c) layer 3
III.HASIL DAN DISKUSI
Simulasi dilakukan menggunakan Matlab dengan model seperti pada Gambar 2. Nilai masing-masing parameter pada ditunjukkan pada Tabel 1.
TABELI PARAMETER SIMULASI
Parameter Keterangan
Motor Induksi 1 dan 2
Daya Input (Pin) 50 HP
Resistansi Stator (Rs) 0.2 Ohm Induktansi d-axis (Ld) 8.5 mH Induktansi q-axis (Lq) 8.5 mH Jumlah pasang kutub
(p) 4 pasang Momen Inersia (J) 0.089 Kg.m2
Static Friction (Tf) 0.005 N-m Frekuensi Switching 10 kHz
Batteray 780 Volt
Selama simulasi sistem ini mengalami pembebanan yang tidak seimbang. Pada penggerak pertama (motor 1) dibebani dengan torsi sebesar 250 Nm, sedangkan pada penggerak kedua (motor 2) dibebani sebesar 100 Nm. Sistem kontrol dikatakan berhasil, jika dapat mengendalikan putaran pada kedua motor dengan beban yang berbeda ini pada kecepatan yang sama.
Ketika kedua penggerak dibebani dengan kedua beban mekanik yang berbeda, maka beban elektris (Te) yang dirasakan oleh kedua penggerak ditunjukkan pada gambar 7 berikut ini.
Waktu (detik)
T
or
ka
E
le
kt
ri
k
/T
e
(
Nm
)
(a)
Waktu (detik)
T
ork
a E
le
kt
ri
k
/T
e
(Nm
)
(b)
Gambar 8. Torka elektris (Nm) pada kedua pengerak: (a) motor 1, (b) motor 2
Waktu (detik)
K
ec
e
pa
ta
n
(ra
d
/de
dt
ik
)
Gambar 9. Kecepatan referensi kedua penggerak mobil listrik
Berdasarkan gambar 8, kedua penggerak mengalami masa transien selama 3 detik untuk bisa stabil semenjak motor dinyalakan.
Selain dibebani dengan beban mekanik yang berbeda, pada sistem ini juga diatur kecepatan referensi kedua motor yang tidak konstan. Kecepatan referensi dirancang seperti pada gambar 9.
Waktu (detik)
K
ec
epa
ta
n
(ra
d
/de
dt
ik
)
100 | SEMNASKIT 2015/ ISSN : 2477-5649
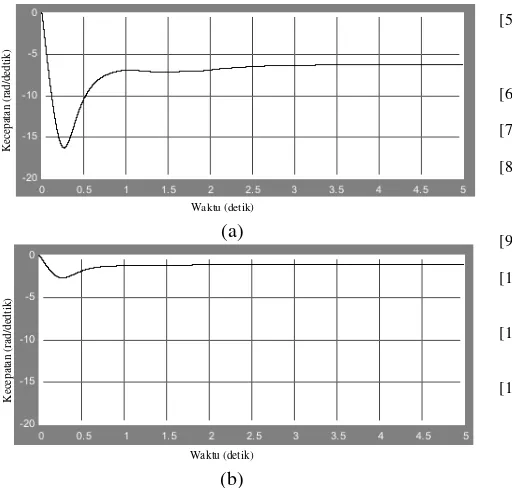
Gambar 10. Perbandingan kecepatan masing-masing motor penggerak : (a) motor dengan kendali PI, (b) motor dengan kendali
DRNN
Mengacu pada beban mekanik dan kecepatan referensi yang dirancang, maka dilakukan simulasi sesuai dengan parameter dan rangkaian yang ditunjukkan pada gabar 2 sebelumnya. Berdasarkan hasil simulasi diketahui terjadi perbedaan hasil Antara sistem ketika menggunakan kontroller DRNN dan ketika sistem menggunakan PI. Hal ini ditunjukkan pada gambar 10.
Selisih kecepatan pada motor 1 dan motor 2 berdasarkan pada hasil simulasi pada gambar 10, ditampilkan pada gambar 11 di bawah ini.
Waktu (detik)
Gambar 11. Selisih kecepatan kedua penggerak : (a) motor dengan kendali PI, (b) motor dengan kendali DRNN
Apabila kedua sistem kontrol dibandingkan, yaitu berdasarkan hasil pada Gambar 10 dan 11, terjadi perbedaan. Sistem dengan kontroller DRNN tampak jauh lebih stabil dan kedua motor tampak berputar dengan kecepatan yang relative sedikit perbedaaan jika dibandingkan dengan ketika sistem menggunakan kontroller PI. Saat menggunakan kontroller DRNN selisih kecepatan motor 1 dan motor 2 sekitar 2 rad/detik, sedangkan saat menggunakan kontroller PI sebesar 7 rad/detik pada kondisi steady state.
IV.KESIMPULAN
Dalam makalah ini, strategi baru pengendalian mobil listrik multi-penggerak dengan menggunakan motor induksi 3 fasa direkomendasikan. Berdasarkan pada perbandingan hasil simulasi dan analisis diketahui bahwa saat sistem menggunkan kontroller DRNN performansi sitem jauh lebih baik daripada ketika sistem mobil listrik dikendalikan oleh PI konvensional. Hal ini nampak pada selisih kecepatan pada motor 1 dan motor 2 ketika diberi beban yang berbeda pada masing-masing kontroller. Pada kondisi steady state, selisih kecepatan sekitar 2 rad/detik saat menggunakan kontroller DRNN, sedangkan saat menggunakan kontroller PI sebesar 7 rad/detik.
DAFTAR PUSTAKA
[1] Husain, I., 2003, Electric and Hybrid Vehicles Design Fundamentals, CRC Press, United Stated.
[2] Bernstein, L., et all, 2008, Intergovernmental Panel on Climate Change Fourth Assessment Report Climate Change 2007: Synthesis Report Summary for Policymakers, Intergovernmental Panel on Climate Change.
[3] Kunzli, N., et all, 2000, Public-Health Impact of Outdoor and Traffic-Related Air Pollution: A European Assessment, The Lancet, Vol. 356. [4] Ashish Chourasia, et all, 2014, Comparison study of Vector Kontrol of Induction Motor Using Rotor Flux Estimation by Two Different Methods, IEEE Transactions on Energy Conversion Vol 7 [5] Bhakti M Joshi, Nukul C Chandorkar, 2014, Two-motor
single-inverter fieldoriented induction machine drive dynamic performance, Department of Electrical Engineering, Indian Institute of Technology Bombay
[6] K. Gopi, P. Varunkrishna, 2014, Induction Motor Drives Fed By Four-Leg Inverter, IEEE Transactions on Energy Conversion Vol 1 [7] E. Levi, et all, 2007, Multiphase Induction Motor Drives-a
Technology Status Review, IET Electr. Power Vol 1
[8] Tabbache B, Kheloui A. and Benbouzid M. E. H, 2011, An adaptive electric differential for electric vehicles motion stabilization.IEEE Transactions on Vehicular Technology, 60(1): 104–110
[9] Turl G, Summer M and Asher G. M, 2002, A Synchronised Multi-Motor Kontrol
[10] Sistem Using Sensorless Induction Motor Drives.International Conference on Power Electronics, machines and Drivespp. 38–43: 4– 7
[11] Hartani K., Bourahla M., Miloud Y. and Sekkour M., 2008, Direct torque kontrol of an electronic differential for electric vehicle with separate wheel drives, Journal Automation and Sistems Eng.2(2) [12] Purnomo, M. H. dan Kurniawan, A., “Supervised Neural Networks