LAPORAN PRAKTIKUM
FISIOLOGI DAN PENGUKURAN KERJA
PENGUKURAN KERJA TIDAK LANGSUNG
Kelompok : A22 Tgl. Praktikum : 9 November 2015
Nama :
Rimadilla Rizqy Linauliyamara (14522157) Dewi Rahmawati (14522208)
Hari Praktikum : Rabu
Dikumpulkan tgl. : 16 Desember 2015
Kelas : A Yogyakarta, ... 2015 Asisten
(Perdana Suteja Putra) Asisten : Perdana Suteja Putra
(E-102) Kriteria Penilaian
Format Laporan : (max: 10)
Perhitungan : (max: 35)
Analisa : (max: 30)
Rekomendasi : (max: 25)
TOTAL :
LABORATORIUM DESAIN SISTEM KERJA DAN ERGONOMI
JURUSAN TEKNIK INDUSTRI
FAKULTAS TEKNOLOGI INDUSTRI
UNIVERSITAS ISLAM INDONESIA
BAB VII
MICROMOTION STUDY
7.1 Tujuan Praktikum
1. Memperkenalkan kepada praktikan tentang metode Micromotion Study dalam aplikasi pengukuran waktu baku dengan menganalisis elemen-elemen gerakan kerja.
2. Praktikan dapat mengidentifikasikan elemen-elemen gerakan dan mampu menganalisis elemen –elemen gerakan yang efektif dan tidak efektif pada suatu pekerjaan.
3. Praktikan dapat melakukan perbaikan-perbaikan elemen-elemen gerakan yang tidak diperlukan atau tidak efektif sehingga dapat melakukan pengaturan tata letak fasilitas atau stasiunkerja.
4. Praktikan dapat menghitung penghematan waktu berdasarkan perbaikan yang telah dilakukan.
7.2 Tugas Praktikum
Mengamati video perakitan suatu produk dan menganalisa elemen-elemen gerakan yang ada pada stasiun kerja awalan dan stasiun kerja usulan kemudian membuat tabel elemen gerakan (MTM) serta melakukan perhitungan waktu baku dan penghematan dari kedua stasiun kerja tersebut.
7.3 Output
7.3.1 Deskripsi
Praktikum dilakukan dengan mengambil video perakitan tamiya dan menganalisa elemen–elemen gerakan yang ada pada stasiun kerja awalan dan stasiun kerja usulan. Layout awalan merupakan layout stasiun kerja yang sudah ditentukan sedangkan layout usulan merupakan layout stasiun kerja perbaikan. Berikut merupakan biodata operator:
Nama : Dewi Rahmawati
Umur : 20 Tahun
Jenis Pekerjaan : Merakit Mobil Tamiya
Komponen/part yang terdapat pada stasiun kerja berjumlah 9. Masing-masing diberi kode seperti pada tabel berikut:
Tabel 7.1. Tabel kode komponen mobil tamiya.
No Nama Komponen Kode
1 Body atas A
2 Jog B
3 Body bawah C
4 Roda D
5 Connecting Rod E
6 Mesin F
7 Screw jog G
8 Screw body bawah H
9 Obeng I
7.3.2 Layout Awalan
Part mobil tamiya diletakkan sesuai dengan ketentuan yaitu sebagai berikut:
Nampan A berisi body bawah dan roda.
Nampan B berisi body atas, screw dan connecting rod. Nampan C berisi jok, mesin dan obeng.
Gambar 6.1 Layout Awalan.
Gerakan Efektif
A
B
C
20”
21” 21”
1. Mengambil body atas dengan tangan kiri sejauh 20” dan mengambil jog mobil dengan tangan kanan sejauh 21”,
2. Menekan jog pada body atas.
3. Mengambil obeng dengan tangan kanan sejauh 21” 4. Mengambil 2 baut dengan tangan kanan.sejauh 20”.
5. Memasang body dan jog mobil. Tangan kanan memutar baut menggunakan obeng membentuk sudut 90 sebanyak 13 kali.
6. Memutar baut obeng membentuk sudut 90 sebanyak 13 kali. 7. Mengambil 2 baut dengan tangan kanan sejauh 20”.
8. Memutar baut dengan obeng membentuk sudut 90 sebanyak 11 kali 9. Memutar baut dengan obeng membentuk sudut 90 sebanyak 11 kali 10. Meletakkan obeng dengan tangan kanan,
11. Meletakkan body mobil dengan tangan kanan sejauh. 12. Mengambil body bawah dengan tangan kiri sejauh 21”. 13. Mengambil connecting rod dengan tangan kanan sejauh 20”. 14. Memasang connecting rod dengan body bawah.
15. Mengambil roda dengan tangan kanan sejauh 21”. 16. Tangan kanan memasang roda pada connecting rod, 17. Mengambil roda dengan tangan kiri sejauh 21”.
18. Tangan kiri emasang roda pada ujung connecting rod yang lain. 19. Mengambil mesin dengan tangan kanan sejauh 21”.
20. Memasang mesin pada body bawah mobil
21. Mengambil roda mobil dengan tangan kanan sejauh 21”. 22. Memasang roda mobil mobil pada mesin.
23. Menggambil roda mobil dengan tangan kiri sejauh 21”. 24. Memasang ban mobil pada ujung mesin yang lain.
25. Menggambil body atas mobil dengan tangan kanan sejauh 20” 26. Menyatukan body bawah dengan body atas mobil.
27. Menggambil 2 baut dengan tangan kanan sejauh 20”. 28. Menggambil obeng dengan tangan kanan sejauh 20’
31. Menggambil 2 baut dengan tangan kanan sejauh 20”
32. Memutar baut dengan obeng membentuk sudut 90 sebanyak 17 kali 33. Memutar baut dengan obeng membentuk sudut 90 sebanyak 17 kali 34. Mengambil 2 baut dengan tangan kanan sejauh 20”.
35. Memutar baut dengan obeng membentuk sudut 90 sebanyak 15 kali 36. Memutar baut dengan obeng membentuk sudut 90 sebanyak 16 kali
Gerakan tidak efektif 1. Memilih baut
2. Meletakkan body mobil ke tangan kanan 3. Meletakan body bawah ke tangan kiri.
4. Membalikkan posisi mesin. 5. Membalikkan posisi mesin. 6. Membalikan posisi mesin.
7. Memindahkan body bawah mobil ke tangan kiri.
8. Mengarahkan roda.
9. Membalikkan body atas mobil. 10. Memeriksa kembali
11. Mencari obeng
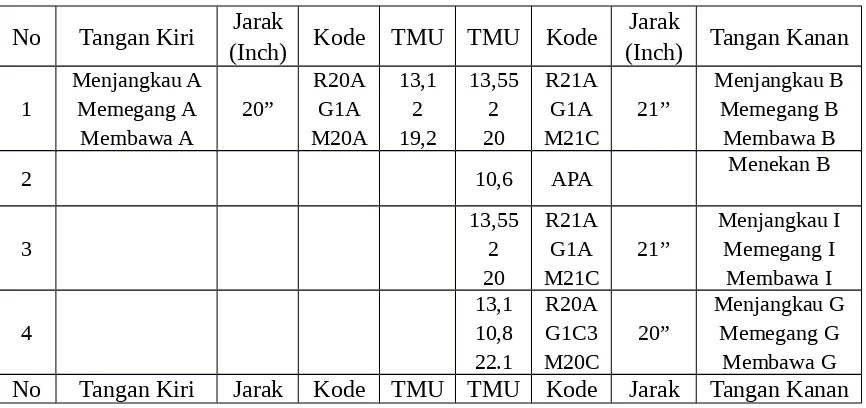
Berikut merupakan tabel kanan kiri berdasarkan video perakitan: Tabel 7.2 Tabel tangan kanan-kiri layout awalan. No Tangan Kiri Jarak
(Inch) Kode TMU TMU Kode
Jarak
(Inch) Tangan Kanan 1
Menjangkau A Memegang A
Membawa A
20”
Menjangkau B Memegang B
Membawa B
2 10,6 APA Menekan B
3
Menjangkau I Memegang I
Membawa I
4
Menjangkau G Memegang G
(Inch) (Inch)
Mengarahkan I Memutar I 13 kali, 90
Mengarahkan I Memutar I 13 kali, 90
Menjangkau G Memegang G
Membawa G
8 9,1
59,5
PISSE TS90 11
Mengarahkan I Memutar I 11 kali, 90
Mengarahkan I Memutar I 11 kali, 90
10 2 RL1 Melepas I
11
Memidahkan A ke tangan
kanan
G3 5,6 2 GIA Memegang A
12 2 RL1 Melepas A
13
Menjangkau C Memegang C
Membawa C
21”
Menjangkau E Memegang E
Membawa E
15 9,1
2
PISSE RL1
Mengarahkan E Melepas E
16
Menjangkau D Memegang D
Membawa D
17 9,1
2
PISSE RL1
Mengarahkan D Melepas D
18
Memindahkan C ke tangan
kanan
G3 5.6 2 G1A Memegang C
19
Menjangkau D Memegang D
Membawa D
21” Melepas D
PISSE
Menjangkau F Memegang F
Membawa F
22 5,6 G2 Membalikan F
(Inch) (Inch)
23 5,6 G2 Membalikan F
24 5,6 G2 Membalikan F
25 16,2 APB Menekan
26
Menjangkau D Memegang D
Membawa D
27 9,1
2
PISSE RL1
Mengarahkan D Melepas D
28
Memindahkan C ke tangan
kanan
G3 5,6 2 G1A Memegang C
29
Menjangkau D Memegang D
Membawa D
21” Melepas D
PISSE
Menjangkau A Memegang A
Membawa A
32 10,6 APA Menekan A
33 5,6 G3 Memeriksa A
34
Menjangkau H Memegang H
Membawa H
35
Menjangkau I Memegang I
Membawa I
36 9,1
91,8
PISSE TS90 17
Mengarahkan I Memutar I
17 kali 90
Mengarahkan I Memutar I
17 kali 90
Menjangkau H Memegang H
Membawa H
39 9,1
91,8
PISSE TS90 17
Mengarahkan I Memutar I
17 kali 90
Mengarahkan I Memutar I
17 kali 90
No Tangan Kiri Jarak
(Inch) Kode TMU TMU Kode
Jarak
41
13,1 10,8 22.1
R20A G1C3 M20C
Menjangkau H Memegang H
Membawa H
42 9,1
81
PISSE TS90 16
Mengarahkan I Memutar I
15 kali 90
43 9,1
86,4
PISSE TS90 16
Mengarahkan I Memutar I
16 kali 90
TOTAL TMU 1608,4
1 TMU = 0,00001 Jam = 0,0006 Menit = 0,036 detik
waktu baku=1608,4TMU ×0,0006
¿0,96504meni t
7.3.3 Layout Usulan
Pada layout usulan, komponen mobil tamiya diletakkan secara berkelompok dimana dalam pengambilannya menjadi lebih cepat dan mudah. Layout usulan tersebut yaitu:
Nampan A berisi jog, screw dan obeng.
Nampan B berisi roda, mesin dan connecting rod. Nampan C berisi body atas dan body bawah
Gambar 6.2 Layout Usulan
Gerakan Efektif
A
B
C
20”
21” 21”
1. Mengambil body atas dengan tangan kiri sejauh 21” 2. Mengambil jog mobil dengan tangan kanan sejauh 21”, 3. Menempelkan jog pada body atas.
4. Mengambil obeng dan 2 baut dengan tangan kanan.sejauh 21”.
5. Memasang body dan jog mobil dengan cara memutar baut menggunakan obeng membentuk sudut 90 sebanyak 12 kali .
6. Memutar baut dengan obeng membentuk sudut 90 sebanyak 12 kali 7. Mengambil 2 baut dengan tangan kanan sejauh 21”.
8. Memutar baut dengan obeng membentuk sudut 90 sebanyak 12 kali 9. Meletakkan body mobil dengan tangan kiri sejauh 21” sekaligus
meletakkan obeng dengan tangan kanan sejauh 21”. 10. Mengambil body bawah dengan tangan kiri sejauh 21”. 11. Mengambil connecting rod dengan tangan kanan sejauh 20”. 12. Memasang wheel connecting rod dengan body bawah. 13. Mengambil roda dengan tangan kiri sejauh 20”. 14. Memasang roda pada connecting rod.
15. Mengambil roda dengan tangan kanan sejauh 20”.
16. Tangan kanan memasang roda pada ujung connecting rod yang lain. 17. Mengambil mesin dengan tangan kanan sejauh 20”.
18. Memasang mesin pada body bawah mobil.
19. Mengambil roda mobil ketiga dengan tangan kanan sejauh 20”. 20. Memasang roda mobil ketiga mobil pada mesin.
21. Menggambil roda mobil keempat dengan tangan kiri sejauh 20”. 22. Memasang ban mobil pada ujung mesin yang lain.
23. Menggambil body atas mobil dengan tangan kanan sejauh 21” 24. Menyatukan body bawah dengan body atas mobil.
25. Menggambil obeng dan 2 baut dengan tangan kanan sejauh 21”. 26. Memutar baut dengan obeng membentuk sudut 90 sebanyak 14 kali. 27. Memutar baut dengan obeng membentuk sudut 90 sebanyak 14 kali. 28. Menggambil 2 baut dengan tangan kanan sejauh 21”
31. Mengambil 2 baut dengan tangan kanan sejauh 21”.
32. Memutar baut dengan obeng membentuk sudut 90 sebanyak 14 kali 33. Memutar baut dengan obeng membentuk sudut 90 sebanyak 13 kali
Gerakan Tidak Efektif
1. Memindahkan body bawah ke tangan kiri
2. Memindahkan body bawah mobil ke tangan kiri. 3. Mengarahkan roda
4. Membalikkan mesin
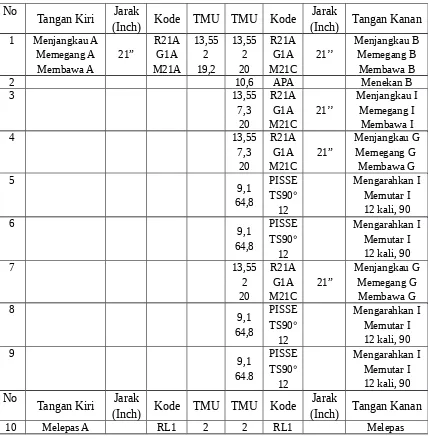
Berikut merupakan tabel kanan kiri berdasarkan video perakitan: Tabel 7.3 Tabel tangan kanan-kiri layout usulan.
No
Tangan Kiri Jarak
(Inch) Kode TMU TMU Kode
Jarak
(Inch) Tangan Kanan 1 Menjangkau A
Memegang A Membawa A
21”
Menjangkau B Memegang B
Membawa B
2 10,6 APA Menekan B
3 13,55
Menjangkau I Memegang I
Membawa I
4 13,55
Menjangkau G Memegang G
Membawa G 5
Mengarahkan I Memutar I 12 kali, 90
Mengarahkan I Memutar I 12 kali, 90
Menjangkau G Memegang G
Membawa G 8
Mengarahkan I Memutar I 12 kali, 90
Mengarahkan I Memutar I 12 kali, 90 No
Tangan Kiri Jarak
(Inch) Kode TMU TMU Kode
Jarak
(Inch) Tangan Kanan
11 Menjangkau C Memegang C
Membawa C
21”
Menjangkau E Memegang E
Membawa E
13 9,1
2
PISSE RL1
Mengarahkan E Melepas E 14 Menjangkau D
Memegang D Membawa D
20” 15 Mengarahkan
D
16 Memindahkan C ke tangan
kanan
Menjangkau D Memegang D
Membawa D
18 9,1
2
PISSE RL1
Mengarahkan D Melepas D
Menjangkau F Memegang F
Membawa F
20 16,2 APB Menekan F
21 13,1
Menjangkau D Memegang D
Membawa D
22 9,1
2
PISSE RL1
Mengarahkan D Melepas D 23 Memindahkan
C ke tangan kanan
G3 5,6 2 G1A Memegang C
24 Menjangkau D Memegang D
Membawa D
20” 25 Mengarahkan
D Melepas D
PISSE RL1
9,1 2
26 13,55
2
Menjangkau A Memegang A
Membawa A
27 10,6 APA Menekan A
28 13,55
2
Menjangkau I Memegang I
(Inch) (Inch)
29 13,55
10,8
Menjangkau H Memegang H
Membawa H 30
Mengarahkan I Memutar I
14 kali 90
Mengarahkan I Memutar I
14 kali 90
Menjangkau H Memegang H
Membawa H 33
Mengarahkan I Memutar I
13 kali 90
Mengarahkan I Memutar I
13 kali 90
Menjangkau H Memegang H
Membawa H 36
Mengarahkan I Memutar I
14 kali 90
Mengarahkan I Memutar I
13 kali 90
TOTAL TMU 1518,95
waktu baku=1 518,95TMU ×0,000 6
¿0,9 1137meni t
7.3.4 Penghematan Waktu
PW=WaktuBaku Layout Awalan−Waktu Baku Layout Usulan
Waktu Baku Layout Awalan ×100 p enghematan waktu=0,96504−0,91137
0,96504 ×100
¿0,05367
0,96504×100
Peta tangan kanan dan tangan kiri merupakan analisa pola gerakan untuk mengurangi kegiatan tidak efektif. Barness R.M. (1980) dalam Alfansuri [CITATION Alf13 \n \t \l 1057 ], peta ini sangat praktis untuk memperbaiki pekerjaan yang dilakukan secara manual. Methods Time Measurement (MTM) adalah suatu sistem penerapan awal waktu baku (predetermined time standard) yang dikembangkan berdasarkan studi gambar gerakan-gerakan kerja dari suatu operasi kerja industri yang direkam dalam film (video).
Berdasarkan perhitungan waktu baku pada layout awalan diperoleh nilai TMU sebesar 1608,4 yang setara dengan 0,96504 menit atau 57,9024 detik.
Dengan elemen-elemen gerakan yang efektif antara lain grasp, move, reach, turn, apply pleasure, position, release. Pada layout awalan operator banyak melakukan gerakan yang tidak efektif antara lain memilih baut, meletakkan body atas ke tangan kanan, meletakan body bawah ke tangan kiri, membalikkan posisi mesin, mengarahkan roda, membalikkan body atas mobil, memeriksa kembali, mencari obeng.
Hal tersebut terjadi karena operator merasa tidak nyaman dengan layout awalan yang ditentukan dengan letak baut yang tercampur, letak body mobil atas, body mobil bawah, serta letak connecting rod, mesin, obeng yang letaknya tidak nyaman untuk dijangkau operator. Selain itu operator terlihat belum begitu menguasai cara merangkai Tamiya terlihat ketika memasang mesin yang harus dibaik berulang kali.
Perhitungan waktu baku yang diperoleh dari layout usulan diperoleh nilai TMU sebesar 1518,95 setara dengan 0,91137 menit atau 54,68 detik.
Pada layout usulan lain grasp, move, reach, turn, apply pleasure, position, release. Gerakan tidak efektif yang dilakukan antara lain memindahkan body bawah mobil ke tangan kiri, mengarahkan roda, membalikkan mesin.
connecting rod, mesin dan roda atas yang diletakkan agar mudah untuk di ambil. Selain layout usulan yang menghematan gerakan kerja operator juga terlihat lebih terlatih ketika memasang Tamiya.
7.3.6 Analisis Penghematan Waktu
Berdasarkan hasil perhitungan waktu layout awalan sebesar 0,96504 menit atau 57,9024 detik dan layout usulan sebesar 0,91137 menit atau 54,68 detik, diperoleh perhitungan penghematan waktu sebesar 5,56 persen. Perhitungan penghematan waktu tersebut membuktikan bahwa layout usulan memudahkan operator untuk menyelesaikan pekerjaannya dengan mengurangi gerakan-gerakan tidak efektif yang dikerjakannya.
7.3.7 Kesimpulan
1. Motion study ialah teknik yang digunakan untuk menganalisa gerakan kerja yang dilakukan terhadap beberapa gerakan bagian badan pekerja dalam menyelesaikan pekerjaannya secara detail. Dengan perhitungan waktu baku menggunakan metode MTM berdasarkan elemen kerja yang dilakukannya.
2. Elemen gerakan efektif yang terjadi pada layout awalan ialah Graps, move, reach, turn, apply pleasure, position, release dangkan elemen gerakan non-efektif antara lain Search, Position, transport
3. Perbaikan pada elemen gerakan yang tidak efektif dilakukan dengan pengaturan tata letak stasiun kerja. Perbaikan tersebut antara lain penataan skrup untuk body bawah dan skrup untuk body atas yang dibedakan, penataan ban mobil yang terdapat disebelah ujung kanan dan ujun kiri, penataan jog mobil yang berada di stasiun kerja paling kanan, body mobil atas dan bawah diletakkan pada stasiun kerja paling kiri sehingga dapat mengurangi dan menghindari pekerja dalam melakukan gerakan tidak efektif seperti gerakan Search, Position, dan
transport.
DAFTAR PUSTAKA
Alfansuri. (2013). Perancangan Ulang Sistem Kerja pada Pembuatan Kotak Surat Dengan Measurement Time Method. Inovtek, Volume 3, Nomor 1, 26-30.
Laboratorium Desain Sistem Kerja dan Ergonomi. (2015). Modul 7 Pengukuran Kerja Tak Langsung. Yogyakarta: Jurusan Teknik Industri Universitas Islam Indonesia.
LAMPIRAN FOTO
Gambar 5.3 Layout Awalan