TEKNIK SAMPLING DATA PADA SISTEM KENDALI SUHU
TUNGKU SINTER PELET UO
2ME-06
Achmad Suntoro
Pusat Rekayasa Perangkat Nuklir, BATAN, Komplek Puspiptek Gd 71. Lt. 2 Serpong
ABSTRAK
TEKNIK SAMPLING DATA PADA SISTEM KENDALI SUHU TUNGKU SINTER PELET UO2 ME-06. Teknik sampling untuk monitoring dan pengendalian suhu pada tungku sinter pelet UO2
dikembangkan dengan metode validasi melalui nilai rata-rata. Teknik ini dilakukan untuk menekan noise spike yaitu dengan menentukan nilai sampling yang diinginkan melalui proses perbandingan. Nilai rata-rata lima data sampling lainnya di sekitar waktu sampling yang diinginkan diambil dengan periode waktu sampling yang lebih kecil dari periode waktu sampling yang diinginkan tersebut. Selanjutnya nilai rata-rata ini dibandingkan dengan nilai sampling yang diinginkan. Hasil perbandingan ini digunakan untuk validasi pembuktian bahwa nilai sampling yang diinginkan telah terbebas dari noise spike. Periode sampling yang diinginkan dipilih seperlima time-constant tungku. Pengembangan ini berhasil menekan spike noise yang masuk pada saluran termokopel sistem tungku dan menghasilkan data hasil sampling yang baik sehingga pengendalian suhu dalam tungku tergolong presisi. Makalah ini berisi penjelasan bagaimana teknik tersebut diimplementasikan.
Kata kunci: teknik sampling, sampling non-periodik, sampling termokopel, noise spike.
ABSTRACT
A DATA SAMPLING TECHNIQUE ON TEMPERATURE CONTROL OF SINTERING
FURNACE FOR UO2 PELLET ME-06. A sampling technique for monitoring and controlling the
sintering furnace temperature for UO2 pellet has been developed by using a validation method through
an average value. This technique is developed to eliminate spike noise by defining the required sampling value through a comparison process. An average of five other sampling data around the required sampling time is taken using sampling period which is less than the sampling time of the sampling data required. Then the average value is compared with the sampling value required. The result of the comparison is used to prove that the required sampling value has been free from any noise spike. The time sampling period required is chosen one-fifth of the time-constant of the furnace system. This technique is succesfully done to eliminate spike noise that comes through the thermocouple wiring system of the furnace and produces good sampled data so that the controlling temperature of the furnace works in precission results. This paper describes how the technique has been implemented. Key words: sampling technique, non-periodic sampling, thermocouple sampling, spike noise.
1. PENDAHULUAN
Sistem elektronika yang muncul dan berperan di panggung industri pada dasarnya bekerja menggunakan sistem analog yang bersifat kontinu, dan sistem digital yang bersifat diskrit. Dalam perjalanan peran tersebut, dewasa
ini sistem digital lebih populer digunakan dibanding dengan sistem analog. Teknik analog digunakan dalam dunia elektronika pada kondisi-kondisi tertentu dimana sistem digital sulit dipakai.
Termokopel sebagai transducer dari temperatur ke sinyal listrik menghasilkan sinyal
analog. Sinyal ini dapat langsung digunakan baik untuk umpan–balik pengendalian ataupun untuk ditampilkan dan disimpan jika perangkat yang digunakan menggunakan sistem analog. Jika sistem digital yang digunakan, maka sinyal analog dari termokopel tersebut harus diubah terlebih dahulu menjadi sinyal diskrit atau digital sebelum diproses lebih lanjut.
Sampling adalah suatu kegiatan yang merupakan bagian dalam proses perubahan sinyal analog menjadi sinyal digital. Problem utama dalam sampling adalah bagaimana mengambil data kontinu tersebut sehingga data hasil sampling tidak kehilangan informasi yang ada dalam sinyal kontinu yang disampling. Teori sampling untuk sinyal periodik yang dikenal dengan Nyquist Criterion memberi batasan bahwa frekuensi sampling harus lebih besar dari dua kali frekuensi sinyal yang disampling [1]. Batasan ini digunakan untuk menghindari problem aliasing yang bisa terjadi jika frekuensi sampling di bawah yang dipersyaratkan. Untuk sinyal yang disampling tidak bersifat periodik, maka batasan tersebut tidak mungkin digunakan langsung tetapi harus melalui suatu proses pendekatan.
Problem lain dalam pengambilan data dengan sampling tersebut adalah jika data tersebut tercampur dengan noise. Ketika sampling dilakukan dan kebetulan noise yang terambil, maka hasil sampling akan menjadi salah yang bisa mengakibatkan kesalahan sistem kendali yang menggunakan data hasil sampling tersebut.
Gambar 1. Tungku sinter pelet UO2 ME-06 obyek
teknik sampling.
Sistem tungku sintering pelet UO2 ME-06
(Gambar 1) pada awalnya menggunakan kendali
suhu yang bekerja secara analog, namun sistem kendali analog tersebut telah rusak dan tidak mungkin diperbaiki [2]. Penggantian kendali suhu tersebut dilakukan menggunakan kendali suhu yang bekerja berbasis sistem digital, yaitu menggunakan sebuah personal computer (PC). Oleh karena itu proses sampling harus dilaksanakan. Dalam makalah ini, teknik sampling yang digunakan oleh pengendali suhu tungku sinter ME-06 akan dibahas. Teknik sampling tersebut telah digunakan dan terbukti dapat mengatasi persoalan teknis konversi data dalam operasi tungku tersebut.
2. TEORI
2.1. Periode sampling
Sampling data merupakan teknik yang sering digunakan dalam dunia instrumentasi mengingat data yang tersedia terlalu banyak jika
Gambar 2. Fenomena proses sampling
b. Frekuensi sampling fs < 2 fi a. Sinyal informasi, frekuensi fi
c. Frekuensi sampling fs = 2 fi d. Frekuensi sampling fs > 2 fi ; (fs = 4 x fi) waktu waktu waktu waktu
diambil seluruhnya atau untuk tujuan konversi data. Sampling data hanya mengambil data
secukupnya untuk mewakili data yang banyak tersebut.
Dalam proses sampling, data hasil sampling akan mengandung kesalahan jika dibandingkan dengan informasi yang disampling. Kesalahan tersebut akan menjadi mengecil jika frekuensi samplingnya meninggi, dan kesalahan akan menjadi nol untuk frekuensi sangat tinggi atau praktis kembali menjadi sistem analog. Sesungguhnya ide dasar sistem diskrit adalah mengurangi frekuensi sampling namun data hasil sampling masih mengandung informasi yang disampling.
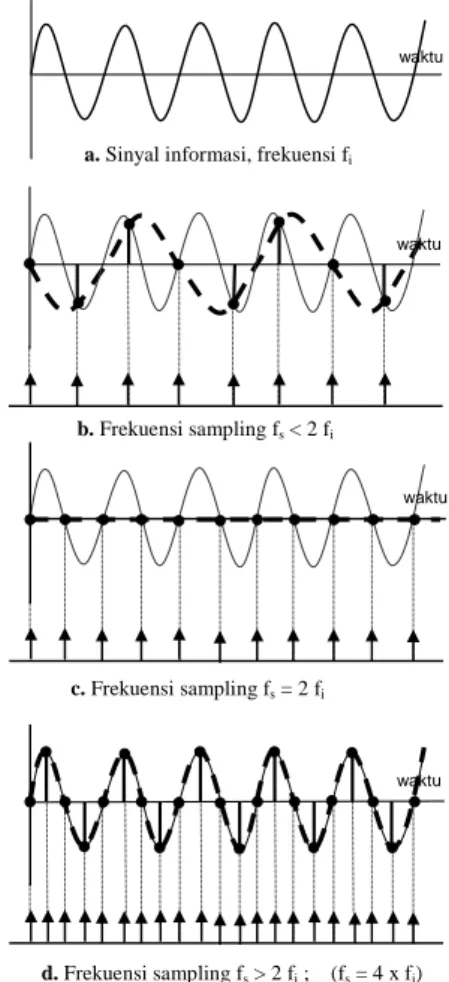
Gambar 2 adalah sebuah contoh fenomena yang terjadi dalam proses sampling. Gambar 2.a adalah sinyal informasi dengan frekuensi fi yang
akan disampling menggunakan frekuensi sampling fs. Hasil sampling ditunjukkan pada
Gambar 2.b s/d 2.c dengan garis putus-putus. Kesalahan yang ada pada hasil sampling pada Gambar 2.b dan 2.c tidak mewakili sama sekali informasi yang disampling, dan kondisi ini yang disebut dengan aliasing.
Gelombang informasi hasil sampling berupa gelombang lain dengan frekuensi lebih rendah pada Gambar 2.b, dan hilang sama sekali pada Gambar 2.c (karena amplitudo selalu nol). Hal itu terjadi jika frekuensi sampling lebih kecil atau sama dengan dua kali frekuensi informasi yang disampling. Jika frekuensi sampling di atas dua kali frekuensi informasi seperti yang diperlihatkan pada Gambar 2.c yaitu fs = 4 x fi maka kesalahan data sampling
masih mengandung sinyal informasi. Teori sampling memberikan batasan bahwa tidak akan terjadi aliasing jika frekuensi sampling yang digunakan lebih besar dari dua kali frekuensi informasi yang ada pada data tersebut [1]. Frekuensi gelombang merupakan faktor kunci atas bentuk dari gelombang tersebut sehingga dari frekuensi tersebut periode sampling harus diturunkan.
Teori sampling memberi batasan dua hal agar aliasing tidak terjadi. Pertama frekuensi sampling yang digunakan harus lebih tinggi dari dua kali frekuensi informasi tertingginya. Kedua adalah semua amplitudo informasi bernilai nol untuk informasi di atas frekuensi tertinggi tersebut [1]. Kedua batasan tersebut harus dipenuhi untuk menghasilkan data hasil sampling yang terbebas dari aliasing.
Spektrum frekuensi gelombang informasi yang tidak periodik akan berbentuk kontinu [1]. Oleh karena itu, semua frekuensi akan ada dalam spektrum informasi tersebut, sehingga pendekatan harus dilakukan untuk menentukan frekuensi sampling terhadap informasi yang
tidak periodik tersebut. Hal ini dapat dilakukan dengan menggunakan frekuensi spektrum tertinggi (dalam batas toleransi) dari hasil transformasi Fourier atas gelombang informasi tersebut.
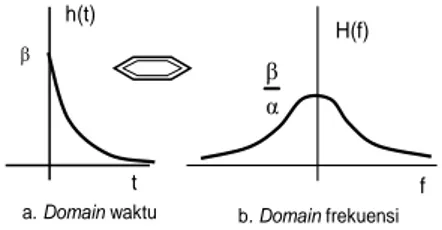
Gambar 3. Transformasi Fourier [1] f H(f)
a. Domain waktu b. Domain frekuensi
t h(t) β
α β
Gambar 3.b memperlihatkan bentuk spektrum yang kontinu dari sebuah gelombang non-periodik yang berbentuk eksponensial. Persamaan gelombang informasi tersebut adalah: t -α
e
β
h(t)
=
(1) dan persamaan hasil transformasi Fourier atas gelombang tersebut adalah [1]:2 2 2
f
π
4
α
H(f)
+
=
β
(2) Dari Gambar 3.b terlihat bahwa frekuensi tertinggi hasil transformasi Fourier terletak pada titik tak terhingga, sehingga pendekatan praktis harus dilakukan. Langkah pendekatan diawali dengan mendefinisikan suatu bilangan realpositip yang menjadi faktor ketinggian amplituda H(f).
0 ≤ P ≤ 1
jika P = 0 ⇒ H(f) = 0, P = 1 ⇒ H(f) = β/α.
Besarnya nilai P diatas mengikuti grafik domain frekuensi pada Gambar 3.b dengan memenuhi persamaan (2). Nilai P digunakan untuk pendekatan dalam menentukan frekuensi tertinggi dari persamaan (2). Dengan definisi variabel P tersebut dan menggunakan persamaan (2) diperoleh persamaan sebagai berikut:
2 2 s P -1 P -1 P T = πσ (3)
dimana σ adalah time-constant sinyal informasi yang nilainya 1/α. Terlihat untuk kondisi
sampling ideal yaitu P = 0 terjadi jika periode sampling Ts = 0, atau menjadi sistem kontinu
atau analog. Oleh karena itu nilai P didekati dengan angka yang nilainya relatif kecil.
2.2.Noise spike
Medan magnet yang berubah-ubah merupakan sumber penyebab munculnya tegangan listrik pada ujung konduktor yang membentuk luasan pada medan tersebut. Gambar 4 adalah prinsip munculnya tegangan listrik akibat adanya perubahan medan magnet pada kawat tersebut.
Secara teoritis penyebab timbulnya tegangan di kedua ujung konduktor tersebut mengikuti hukum Faraday yang dapat ditulis dalam bentuk persamaan sebagai berikut [3]:
dt d
-emf= Φ (4)
dimana fluks magnet Φ ditentukan juga oleh luasan S yang ditembus medan magnet B yang berubah-ubah tersebut, dan dihubungkan dengan persamaan: ds B s
∫
= Φ (5)Gambar 4. Kawat membentuk luasan pada medan magnet yang berubah-ubah.
Persamaan (4) dan persamaan (5) berkaitan dengan sistem tungku yang mempunyai termokopel berupa konduktor dengan konfigurasi lingkar tertutup, maka di kedua ujung logam perpanjangan termokopel sangat mungkin mendapat tambahan tegangan, akibat adanya medan magnet yang berubah-ubah dari luar.
Sumber medan magnet yang berubah-ubah dapat berasal dari electric spike yang ditimbulkan oleh peralatan-peralatan listrik yang mengkonsumsi arus listrik tinggi dan terjadi
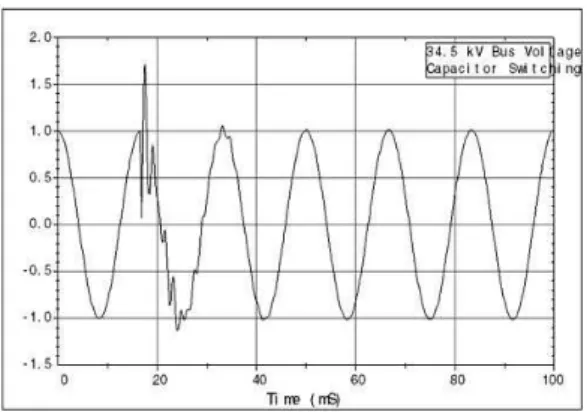
ketika peralatan tersebut beroperasi dinamis ON dan OFF. Gambar 5 adalah contoh bentuk spike
akibat aktivitas peralatan listrik pada jalur tegangan listrik peralatan tersebut [4].
Gambar 5. Spike pada tegangan listrik
Spike listrik akan memancarkan gelombang elektromagnetik ke udara dengan kekuatan tergantung dari besarnya arus spike tersebut. Sehingga semua perkabelan instrumentasi lain di ruangan yang membentuk luasan dan ditembus oleh medan elektromagnet yang berubah-ubah ini akan menghasilkan tegangan induksi di kedua ujung kabelnya berupa pulsa tajam yang serupa dengan spike listrik pembangkitnya dengan nilai tegangan ditentukan oleh persamaan (4).
3. TATA KERJA
emf
Medan magnet yang
berubah-ubah nilainya 3.1. Periode Sampling
Response temperatur sistem tungku sinter ME-06 dimodelkan bersifat eksponensial. Angka penting dalam fungsi eksponensial adalah time-constant. Proses sampling harus bisa mengambil informasi data dengan benar dalam kurun waktu time-constant tersebut.
Pendekatan yang dilakukan untuk periode sampling temperatur pada sistem tungku ME-06 ini adalah:
Ts = σ/5 (6)
σ adalah time-constant perubahan suhu dalam tungku. Gambar 6 memperlihatkan pendekatan periode sampling tersebut.
Gambar 6. Pendekatan periode sampling
Oleh karena itu, langkah pertama dalam kegiatan teknik sampling untuk tungku sinter ME-06 ini adalah menentukan time-constant
dari sistem tungku. Penentuan ini dilakukan dengan dua cara, pertama dengan melihat
response suhu ketika diberi perintah untuk naik selama beberapa detik (diberi perintah fungsi
step). Kedua menggunakan data response dari tungku pada saat terlihat fungsi kendali suhu tungku sudah tidak berfungsi lagi ketika proses penurunan suhu dalam tungku dilakukan. Pada kondisi ini proses penurunan suhu dalam tungku telah terjadi secara alamiah. Dari data kedua pengukuran tersebut time-constant yang mewakili sistem tungku ditentukan.
Gambar 7.a didapat dari data pengukuran sistem tungku yang diberi fungsi step selama 50 detik [5]. Gambar tersebut diperoleh dari kertas grafik yang digambar kembali untuk tujuan pengukuran time-constant ini. Dari gambar tersebut diperoleh data amplitudo tertinggi β = 113 oC dan time-constant σ = 50 detik. Informasi time-delay dapat ditentukan dari tenggang waktu antara ketika sinyal perintah dan hasil perintah masing-masing pada posisi setengah amplitudo tertingi, diperoleh time-delay tungku ME-06 adalahd = 70 detik.
Dari data-data response tungku ME-06 yang dimiliki dapat dilihat bahwa pada saat penurunan temperatur dalam tungku dibawah suhu 500oC, maka suhu di dalam tungku sudah tidak dapat dikendalikan lagi. Kondisi ini menunjukkan karakteristik penurunan temperatur dari tungku. Gambar 7.b adalah pola suhu tungku di bawah 500oC yang diambil dari potongan data eksperimen posisi menurun
(cooling down). Kurva pada Gambar 7.b
berbentuk eksponensial dan dapat ditentukan persamaannya: -0.0036x e 484.29 y = (7)
dimana y dalam derajat Celsius dan x dalam menit. Dari Persamaan (7) dapat dihitung time-constant σ dari tungku saat suhunya menurun yaitu σ = 1/0.0036 menit = 278 menit.
σ disampling 5 x waktu T em perat ur tun g k u ( oC) σ = time-constant
Penurunan Temperatur Tungku tanpa Kendali
y = 484.29e-0.0036x 0 100 200 300 400 500 600 1 61 121 181 241 301 361 421 Waktu (menit) d e ra ja t C e ls iu s
(b). Kondisi suhu turun.
σ= 50 detik 0 60 180 300 92o 157o T em p er at u r t u n g k u ( oC) waktu (detik) 113o
(a). Kondisi suhu naik.
Pulsa perintah
d d = delay = 70 detik
Gambar 7. Karakteristik tungku ME-06.
Dari dua time-constant yang diperoleh, ditetapkan time-constant ketika suhu naik (nilai yang kecil) untuk diambil mewakili karakteristik tungku, yaitu 50 detik. Dari data ini maka ditetapkan periode waktu sampling menggunakan persamaan (6), diperoleh Ts =
50/5 detik = 10 detik.
3.2 Algoritma sampling
Sasaran utama dari algoritma sampling ini adalah untuk menekan kesalahan pengambilan data (sampling) akibat noise yang ditimbulkan oleh spike listrik yang masuk ke jaringan termokopel. Tegangan thermoucouple
berpotensi mengandung noise spike tersebut sehingga diperlukan teknik untuk proses samplingnya.
void sure_data() { int i; float tmps[6]; void get_ana_in(int p); tmps[5] = 0.0; for(;;) { for(i=0;i<5;i++) { get_ana_in(1); tmps[i] = temp_in; tmps[5]= tmps[5]+tmps[i]; delay(50); } tmps[5] = tmps[5]/i; if (fabs(tmps[5]-tmps[0])<5.0) break; } }
Gambar 8. Routine data sampling
Sub-routine get_ana_in() pada Gambar 8 berfungsi untuk mengambil data dari port ADC (Analog to Digital Computer). Diambil lima data dengan selang waktu pengambilan 50 ms yang kemudian diambil nilai rata-ratanya, dan nilai rata-rata tersebut dibandingkan dengan data yang pertama kali diambil. Jika terjadi selisih lebih kecil dari lima itu berarti data yang pertama kali diambil tidak mengandung noise spike, dan jika terjadi lebih besar dari lima artinya data mengandung noise dan routine
pengambilan data diulang dari awal dengan lima data lagi. Pengulangan terus berlangsung selama data mengandung noise hingga data yang diambil bebas dari noise.
4. HASIL DAN PEMBAHASAN
4.1.Hasil
Teknik sampling ini telah digunakan [2] dan hasilnya dapat menekan kesalahan pengambilan data (sampling) sehingga proses pengendalian dapat berjalan dengan baik. Sebelum teknik ini digunakan scara random pernah terjadi pengendalian suhu yang salah, dan terlihat dari layar monitor pengendalian bahwa itu terjadi sebagai akibat adanya spike noise yang diambil sebagai data.
Gambar 9 adalah sampel data hasil penggunaan teknik sampling ini, terlihat tidak ada spikenoise, dan selama penggunaan teknik
sampling ini belum pernah terjadi kesalahan akibat spikenoise seperti sebelumnya.
0 200 400 600 800 1000 1200 1 61 121 181 T em per at ur t ung ku ( oC) Waktu(menit)
Gambar 9. Grafik data hasil sampling
Disamping itu, dari hasil pengendalian yang dipublikasikan [2], yaitu pengendalian suhu menggunakan teknik sampling dalam makalah ini, memperlihatkan bahwa sistim kendali suhu dapat menekan perbedaan antara suhu yang terjadi dalam tungku dengan suhu yang diinginkan oleh kendali di bawah 1%. Pada suhu 1650o C konstan selama 2 jam hanya terjadi perbedaan rata-rata 5oC, dan pada suhu naik
ramp dari 800o C ke 1600o C dalam waktu 3 jam terjadi perbedaan rata-rata 4o C. Fenomena tersebut menunjukkan bahwa teknik sampling yang dibahas dalam makalah ini mampu menekan noise spike maupun menghasilkan ketelitian pengendalian yang baik (presisi).
4.2 Pembahasan
Berikut ini pertimbangan teknis pendekatan yang digunakan dalam proses teknik sampling ini.
4.2.1Periode sampling
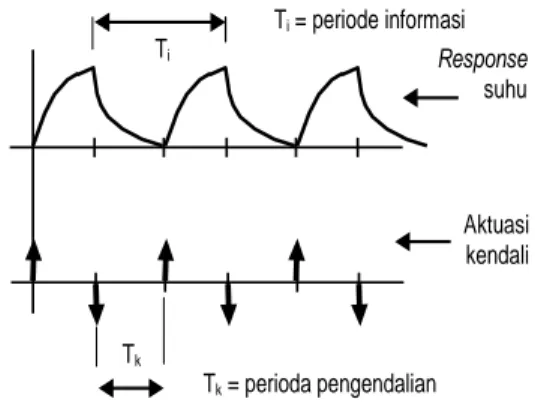
Secara menyeluruh, tegangan termokopel yang disampling sesungguhnya berbentuk tidak periodik, namun demikian didekati dengan fungsi eksponensial yang diasumsikan akan terjadi periodik dengan periode sama dengan periode akibat pengendalian aktuasi sistem tungku Ti. Oleh karena itu periode waktu
sampling Ts yang digunakan nilainya harus lebih
kecil dari periode tersebut Ti.
Ilustrasi proses pengendalian dan sampling data digambarkan pada Gambar 10 dengan
pengandaian bentuk response ideal antara suhu naik dan turun sama untuk penyederhanaan pendekatan. Terlihat bahwa periode pengendalian Tk adalah setengah dari periode
informasi Ti yang muncul akibat pengendalian
tersebut. Oleh karena itu berdasarkan teori sampling, maka periode waktu sampling Ts
harus lebih kecil dari periode aktuasi kendali Tk.
Sistem kendali tungku ME-06 ini menggunakan periode aktuasi pengendalian Tk = 30 detik [2].
Dari sisi pandangan ini, periode sampling Ts
yang dipilih telah memenuhi batasan –pertama teori sampling, karena 10 dt < 30 dt.
Gambar 10. Fenomena pengendalian
Selama dalam selang periode Tk, maka
sistem tungku didekati dengan fungsi eksponensial non periodik dan disampling dengan periode sampling Ts yang telah
ditetapkan 10 detik. Untuk melihat nilai pendekatan yang dilakukan, angka 10 detik dievaluasi menggunakan persamaan (3) dan diperoleh nilai P = 0,065. Angka ini menunjukkan bahwa amplitudo frekuensi tertinggi yang dipakai sebagai referensi penentu Ts mempunyai nilai 6,5% dari amplitudo sinyal
tertinggi dalam domain frekuensi. Nilai ini yang dipakai sebagai pendekatan untuk mendekati nilai ideal 0% (lihat Gambar 3.b). Jadi dalam teknik sampling ini angka 0% sebagai batasan-kedua teori sampling didekati dengan 6,5%.
Dalam instrumentasi pada umumnya, sebelum sampling dilakukan sinyal dilewatkan terlebih dahulu pada low-pass filter untuk menjamin bahwa di atas frekuensi tertinggi sinyal yang akan disampling amplitudonya adalah nol, sesuai dengan batasan-kedua teori sampling. Pendekatan menggunakan P = 0,065 adalah setara dengan menggunakan low-pass filter dengan redaman di atas 20.74 dB,
sehingga low-pass filter tidak diperlukan lagi karena spektrum domain frekuensi atas sinyal
non-periodic telah berbentuk response dari sebuah low-pass filter.
Bentuk fungsi eksponensial dalam pendekatan ini diambil dari melihat data pada Gambar 7 bahwa response tungku berbentuk eksponensial, demikian juga model matematis
response suhu tungku biasa digunakan
berbentuk eksponensial [6]. Terdapat dua time-constant yang berbeda, maka diambil nilai yang terkecil, yaitu time-constant ketika suhu naik. Pertimbangan ini diambil karena time-constant
diambil sebagai nilai penentu periode sampling, sesuai dengan Persamaan (6), dimana periode sampling makin kecil akan menghasilkan data hasil sampling makin baik.
Response suhu Aktuasi kendali Tk = perioda pengendalian Tk Ti Ti = periode informasi
Perbedaan time-constant antara kondisi naik dan turunnya suhu dapat dipahami sebagai berikut. Kenaikan suhu dalam tungku merupakan usaha paksa dengan memberi energi listrik melalui filamen pemanas dalam tungku, sedangkan proses penurunan suhu dilepas secara alamiah tidak ada usaha paksa pendinginan. Proses yang demikian ini yang digunakan dalam pengendalian suhu dalam tungku, sehingga jelas akan memberi nilai time-constant yang berbeda.
4.2.2 Potensi noise
Persamaan (4) dan persamaan (5) menunjukkan potensi masuknya noise dalam saluran termokopel menuju ke instrumen kendali dan monitoring. Meskipun kawat perpanjangan termokopel menggunakan
shielding yaitu coaxial cable, tetapi pada bagian tertentu seperti sambungan di instrumen dan di terminal tungku seperti yang ditunjukkan pada Gambar 11 membentuk luasan. Pada dua posisi tersebut berpotensi besar untuk menjadi pintu masuknya noisespike ke jalur termokopel.
Rangkaian low-pass filter biasanya digunakan untuk menekan noise spike, tetapi pemberian filter tersebut pada jalur thermocuple akan mempengaruhi karakteristik response dari termokopel sehingga dapat menyebabkan kesalahan baca. Teknik sampling dengan rata-rata ini tepat digunakan mengingat sistem tungku mempunyai time-constant dan delay
yang cukup besar sehingga periode sampling juga relatif besar (10 detik). Waktu yang dihabiskan untuk pengambilan sampling rata-rata seperti yang di tunjukkan pada Gambar 8 adalah 5 x 50 ms = 250 ms. Angka ini cukup kecil dan tidak akan mempengaruhi periode sampling yang 10 detik tersebut.
Gambar 11. Luasan kawat termokopel
4.2.3 Algoritma sampling
Routine pada Gambar 8 ditulis untuk bahasa pemrograman C, namun demikian
routine tersebut juga dianggap sebagai pseudo-code dari algoritma teknik sampling ini, karena sederhana dan mudah dibaca.
Aliran kerja algoritma dijelaskan dengan Gambar 12, yaitu selisih antara nilai sampling pertama dengan rata-rata lima sampling yang dilakukan ditetapkan nilainya lima. Angka ini ditentukan untuk mendeteksi terambilnya noise spike.
Besaran hasil konversi suhu dari termokopel adalah tegangan. Oleh karena itu selisih angka 5 mV yang terjadi jika ditransformasikan ke nilai suhu (jenis termokopel tungku ME-06 adalah W3%Re/W-25%Re) akan senilai dengan 320o C [7]. Mengingat lembamnya sistem tungku ( time-constant 50 detik dan time-delay 70 detik) maka tidak mungkin akan terjadi lonjakan suhu setinggi 320o C dalam periode waktu lima kali sampling tersebut, kecuali jika sistem data akusisi telah mengambil (sampling) spikenoise.
informasi
Gambar 12. Algoritma sampling
Fenomena tersebut diatas yang digunakan dalam algoritma sampling ini untuk mendeteksi keberadaan noise spike pada informasi yang akan disampling. Sehingga routine pada Gambar 8 tidak akan berhenti atau kembali ke program utamanya kecuali membawa data yang sudah bebas dari noisespike.
5. KESIMPULAN
Teknik penentuan periode dan metoda sampling untuk tungku sinter ME-06 telah dijelaskan. Teknik ini telah digunakan dalam pengendalian suhu tungku tersebut dan terbukti
noise spike yang sebelumnya pernah muncul secara random tidak lagi terjadi. Teknik ini memanfaatkan kecepatan hitung alat kendali (dalam hal ini komputer), time-delay sistem tungku yang besar, dan periode waktu sampling sistem tungku yang besar. Sampling lima data untuk dirata-rata dan selisih lima mili-volt sebagai penentu hasil perbandingan merupakan variabel pendekatan yang dilakukan dalam teknik ini, yang disesuaikan dengan kondisi tungku ketika beroperasi.
Periode sampling 1/5 time-constant untuk gelombang informasi non-periodik berbentuk eksponensial merupakan pendekatan yang sangat baik. Untuk tungku sinter ME-06 yang memiliki time-constant 50 detik (ketika suhu naik), maka data hasil sampling setara dengan 93,5% kualitas data hasil sampling ideal (kontinu). Indikator ini dilihat dari nilai P = 0,065 yang diperoleh dari periode sampling 1/5
time-constant tersebut, dimana untuk nilai P = 0 adalah nilai untuk sistem sampling yang ideal (kontinu).
disimpan dirata-rata
dibandingkan Jika selisihnya > 5 ulangi lagi
6. DAFTAR PUSTAKA
1. ORAN, B.E DAN BENYAMIN, M., The
Fast Fourier Transform., Prentice-Hall International., Inc., Englewood Cliffs (1974).
2. SUNTORO, A., Refurbishing Sistem
Kendali Suhu Tungku Sinter Pelet UO2.,
Prosiding PPI – PDIPTN 2005., Puslitbang Teknologi Maju – BATAN., Yogyakarta (2005) 63-72.
3. HAYT, W.H. Jr., Engineering
Electromagnetics., McGraw-Hill Kogakusha., Tokyo (1974).
4. Mc. Eachern. (2007) Transient over
voltages,
Available:http://www.powerstandards.com/ tutorials/transientovervoltages.htm .
5. SUNTORO, A., LATIEF A., DAN
RACHMAWATI M., Disain Modifikasi
Sistem Kendali Suhu Tungku Sinter Pelet UO2 Degussa., Prosiding Seminar
Penelitian Dasar Ilmu Pengetahuan dan Teknologi Nuklir, Yogyakarta (1997) 437-445.
6. WILLIAM, CDH., (2007), System Model.,
School of Physiscs, University of Exeter. Available:http://newton.ex.ac.uk/teaching/C DHW/Feedback/SystemModel.html .
7. SUNTORO, A., Karakteristik Termokopel
Tungsten-Rhenium (W-4%Re/W-25%Re)., Prima., Vol. 1, No. 1., (1999) 15-18.
7. DISKUSI
Didi Gayani PTNBR-BATAN:
Apakah ada perbedaan antara teknik sampling untuk menghindari noise dari sistem yang digunakan dengan misalnya penggunaan Low Pass Filter sebelum disampling?
Achmad Suntoro:
Low Pass Filter memang bisa digunakan, tetapi bisa berakibat adanya penurunan amplitudo dari sinyal informasi (terjadi redaman). Teknik dalam makalah ini menggunakan cara software sehingga amplitudo informasi sama sekali tidak mengalami peredaman. Jadi perbedaan utamanya hanyalah pada implementasi: Low Pass Filter cara hardware. Teknik yang dilakukan dalam makalah ini adalah cara
software.
![Gambar 7.a didapat dari data pengukuran sistem tungku yang diberi fungsi step selama 50 detik [5]](https://thumb-ap.123doks.com/thumbv2/123dok/3310623.2366757/5.892.494.699.236.671/gambar-didapat-pengukuran-sistem-tungku-diberi-fungsi-detik.webp)