PENGGUNAAN ABB IRB 2600 ROBOTIC SYSTEM PADA HIGH
VELOCITY OXYGEN FUEL (HVOF) COATING SULZER METCO
PLASMA 9MC
Laporan ini disusun untuk memenuhi salah satu syarat kelulusan mata kuliah Kerja Praktek dan Seminar pada semester V di Program Studi D3-Teknik
Elektronika Jurusan Teknik Elektro
Oleh:
Guntur Kurniawan
NIM : 121311007
POLITEKNIK NEGERI BANDUNG
2014
i
KATA PENGANTAR
Puji dan syukur penulis panjatkan kepada Allah SWT yang telah melimpahkan rahmat serta karunia-Nya, sehingga diberikan kesempatan dalam melaksanakan kerja praktek dan dapat menyelesaikan laporan kerja praktek ini hingga selesai. Sholawat dan salam senantiasa tercurah limpahkan kepada Nabi Besar Muhammad SAW.
Tujuan pembuatan laporan kerja praktek ini sebagai salah satu syarat kelulusan mata kuliah Seminar dan Kerja Praktek pada semester V di Program Studi D3 Teknik Elektronika, Jurusan Teknik Elektro, Politeknik Negeri Bandung. Serta sebagai syarat administrasi kerja praktek di PT. Garuda Maintenance Facility (GMF) AeroAsia.
Dalam penyususan laporan kerja praktek ini penulis banyak mendapatkan bantuan dalam pengambilan data informasi, petunjuk, dan pengarahan dari berbagai pihak. Oleh karena itu, ucapan terimakasih yang mendalam penulis haturkan kepada :
1. Allah SWT atas semua nikmat dan kesempatan yang diberikan selama menyelesaikan laporan kerja praktek ini hingga selesai. 2. Kedua orang tua dan keluarga yang selalu memberikan doa’ dan
dukungan moral serta motivasi yang luar biasa pada penulis selama pelaksanaan kerja praktek ini.
3. Bapak Ir.Hari Purnama, M.Eng., selaku ketua jurusan Elektro Politeknik Negeri Bandung.
4. Ibu Ervin Masitadewi, ST., selaku ketua Program Studi Teknik Elektronika.
5. Bapak Suyanto selaku koordinator kerja praktek Program Studi Teknik Elektronika.
6. Ibu Dra. Peni Handayani, ST., MT., selaku dosen pembimbing yang telah memberikan banyak saran serta masukan selama penyelesaian laporan kerja praktek ini berlangsung.
ii
7. Bapak Adji Bowo Panolo koordinator kerja praktek eksternal dari PT. Garuda Maintenance Facility AeroAsia yang telah membimbing serta memberikan arahan dan juga banyak informasi selama pelaksanaan kerja praktek.
8. Bapak Hendra selaku General Manager SBU Power Services atas kesempatan yang diberikan kepada penulis untuk dapat melaksanakan kerja praktek di unit TZP Part Repair.
9. Mas Dwi Harianto selaku pembimbing lapangan di TZP SBU Power
Services PT. Garuda Maintenance Facility AeroAsia yang telah
berbagi ilmu, pengalaman, arahan serta bimbingannya selama penulis melaksanakan kerja pratek di unit tersebut.
10. Bapak Irwan beserta staff PCC bagian Part Repair atas dukungan yang diberikan kepada penulis.
11. Seluruh Crew Part Repair TZP unit SBU Power Services yang telah bekerja sama membantu penulis selama pelaksanaan kerja praktek. 12. Ibu Rizki Roshana yang telah membatu penulis dalam melengkapi
kebutuhan dokumen serta dalam mengurus keperluan administrasi untuk Laporan Kerja Praktek ini.
13. Teman-teman kerja praktek di GMF yaitu M. Ridwansyahrial, M. Fauzi, M. Fani, dan Troy Agung yang telah menemani dan memberikan kecerian selama kerja praktek berlangsung.
14. Diko Harneldo atas masukan serta arahan dalam menyelesaikan laporan kerja praktek, serta Intan Chairrany Dewangga yang selalu memberi support selama kegiatan Kerja praktek berlangsung.
15. Seluruh rekan-rekan mahasiswa Jurusan Teknik Elektro Program Studi D3 Teknik Elektronika, Politeknik Negeri Bandung yang selalu mendukung penulis dalam melaksanakan kerja praktek.
16. Serta seluruh pihak yang banyak membantu dan selalu memberikan semangat kepada penulis selama kegiatan kerja praktek ini yang tak dapat disebutkan satu-persatu.
iii
Penulis berharap laporan kerja praktek ini sesuai dengan yang diharapkan serta bermanfaat baik untuk pihak perusahaan maupun pihak kampus. Namun penulis sadar bahwa masih banyak terdapat kekurangan dan ketidaksempurnaan dalam penyusunan laporan kerja praktek ini. Oleh karena itu, penulis mohon maaf dan berharap adanya kritik serta saran dari semua pihak yang dapat membangun demi terciptanya laporan kerja praktek yang lebih baik.
Tangerang, 12 September 2014
iv
DAFTAR ISI
KATA PENGANTAR ... i
DAFTAR ISI ... iv
DAFTAR GAMBAR ... vi
DAFTAR TABEL ... vii
BAB I ... 1
PENDAHULUAN ... 1
1.1 Latar Belakang ... 1
1.2 Tujuan Kerja Praktek ... 2
1.3 Target Kerja Praktek ... 2
1.4 Sistematika Penulisan ... 2
BAB II ... 4
TINJAUAN UMUM PERUSAHAAN ... 4
3.1 Profil Perusahaan ... 4
3.1.1 Sejarah Perusahaan dan Prokpektus Perusahaan... 4
3.1.2 Visi dan Misi Perusahaan ... 5
3.1.3 Struktur Organisaasi Perusahaan... 6
3.1.4 Fasilitas Perusahaan ... 7
3.1.5 Peran Nasional dan Internasional Perusahaan... 10
BAB III ... 12
PELAKSANAAN KERJA PRAKTEK LAPANGAN ... 12
3.1 Rangkuman Jenis Pekerjaan dan Waktu Pelaksanaan PKL ... 12
3.2 Pembahasan ... 13
v
3.2.2 Sistem HVOF (High Velocity Oxygen Fuel) ... 13
3.2.3 Plasma Spray Coating with ABB IRB 2600 Robotic System ... 16
3.2.4 ABB IRB 2600 Robotic System ... 18
3.2.5 RobotStudio ... 27
3.2.6 Membuat Tooldata, Wojb, dan Menentukan Titik Awal ... 28
3.2.7 Pemrograman ABB IRB Robotic System untuk tets peice ... 31
BAB IV ... 40 KESIMPULAN ... 40 4.1 Kesimpulan ... 40 4.2 Saran ... 41 Daftar Pustaka ... 42 LAMPIRAN ... 43
vi
DAFTAR GAMBAR
Gambar 2.1 Struktur organisasi PT. GMF AeroAsia ... 6
Gambar 2.2 Hangar I ... 8
Gambar 2.3 Hangar II ... 8
Gambar 2.4 Hangar III ... 9
Gambar 3.1 Plasma Gun Spray ... 14
Gambar 3.2 blok diagram Plasma Spray Coating with ABB IRB 2600 Robotic System ... 16
Gambar 3.3 Diamond Jet DJC Control Unit ... 17
Gambar 3.4 Proses pada Plasama Gun Spray ... 18
Gambar 3.5 axis robot ABB IRB 2600 ... 20
Gambar 3.7 Gambar jangkauan robot ABB IRB 2600 ... 22
Gambar 3.6 Gambar Dimensi Robot ABB IRB 2600 ... 22
Gambar 3.8 Tombol pada IRC5 Controller ... 24
Gambar 3.9 Bentuk FlexPendant ... 25
Gambar 3.10 Hard Button pada FlexPendant ... 26
Gambar 3.11 Cara memegang FlexPendant ... 27
Gambar 3.12 Menentukan TCP (Tool Center Point) ... 29
Gambar 3.13 Kalibrasi robot ... 31
Gambar 3.14 Tes piece yang akan diprogram ... 32
Gambar 3.15 Tampilan FlexPendant dalam kondisi stanbay ... 32
Gambar 3.16 Pergerakan MoveL ... 33
Gambar 3.17 pergerakan MoveC... 34
Gambar 3.18 Pergerakan instruksi MoveJ ... 34
Gambar 3.19 New Module... 35
Gambar 3.20 New Routine ... 36
vii
DAFTAR TABEL
Tabel 3.1 axis Robot ABB IRB 2600... 20 Tabel 3.2 Spesifikasi Robot IRB 2600 ... 20
1
BAB I
PENDAHULUAN
1.1 Latar Belakang
PT. Garuda Maintenance Facility (GMF) AeroAsia, merupakan perusahaan terbesar di Indonesia dalam bidang jasa perawatan pesawat, tentu mempunyai sistem pengolahan industri tersendiri sehingga mampu menunjang segala aspek kegiatan yang terdapat didalamnya. Teknologi industri yang kini kian berkembang seolah memaksa perusahaan untuk dapat ikut serta didalamnya. PT. GMF AeroAsia tidak hanya memiliki konsentrasi pada bidang Aviation namun anak perusahaan dari PT. Garuda Indonesia Airlines Grup ini juga mempunyai konsentrsi pada bidang non-Aviation. Unit SBU Power Services yang memiliki konsentrasi kerja pada perawatan Gas Turbine engine dan Power
Generator kini telah mampu bersaing di kancah industri nasional. Gas Turbine Engine dan Power Generator merupakan salah satu bentuk aplikasi dalam bidang
elektronika industri, maka dari itu penulis ingin mengetahui kegiatan yang berlangsung dalam divisi non-Aviation ini khususnya pada unit SBU Power
Services ini.
Penggunaan robot dalam dunia industri bertujuan untuk mempercepat proses produksi serta mengurangi tingkat kecelakaan kerja. SBU Power Services divisi TZP pada bagian Part Repair mesin turbin kini telah menggunakan sistem robotik dalam proses coating part Turbine Engine. Coating merupakan pelapisan sebuah benda kerja menggunakan sebuah powder tertentu untuk melindungi benda dari suhu yang tinggi serta mengurangai tingkat korosi pada benda tersebut dengan cara memanaskan benda kerja terlebih dahulu dalam suhu yang tinggi, kemudian menyemprotkan powder pada benda kerja tersebut. kegiatan coating yang dilakukan oleh unit ini awalnya secara manual, akan tetapi banyaknya benda kerja yang harus di coating dan waktu yang menuntut untuk cepat dalam penyelesaiannya, maka pengunaan sistem robotik menjadi salah satu jawaban yang kemudian diterapkan pada proses coating ini.
Plasma Spray Coating with ABB IRB 2600 Robotic System merupakan
sistem yang digunakan oleh SBU Power Services bagian Part Repair untuk mempercepat produksi serta mengurangi kecelakaan kerja pada saat proses
coating. Robot ABB IRB 2600 terintegrasi oleh Controller IRC5 dan Flexpendant
yang kemudian menggerakkan robot, serta terintegrasi dengan HVOF System (High Velocity Oxygen Fuel) untuk proses coating. Penggunaan sistem robotik dalam industri sudah lumrah. Maka dari itu, kesempatan bagi penulis untuk dapat mempelajari sistem robot yang terdapat pada industri sehingga dapat berguna dikemudian hari dan dapat berbagi ilmu mengenai robot yang digunakan pada industri, dalam hal ini digunakan oleh GMF Power Services untuk proses coating.
1.2 Tujuan Kerja Praktek
Adapun tujuan dari kerja praktek pada bagian GMF Power Services ini adalah :
1. Mendapatkan pengalaman kerja pada bidang robot industri di PT. Garuda Maintenace (GMF) Facility AeroAsia.
2. Mengetahui cara kerja dari ABB IRB 2600 Robotic System.
3. Mampu membuat program sederhana pada ABB IRB 2600 Robotic
System untuk test piece coating.
1.3 Target Kerja Praktek
Adapun target yang ingin dicapai dalam kegitan kerja praktek ini ialah : 1. Paham serta mampu dalam mengoperasikan ABB IRB 2600 Robotic
System.
2. Mampu membuat program untuk pengoperasian robot ABB IRB 2600 untuk test piece coating.
3. Terampil dalam menggunakan Robot ABB IRB 2600.
1.4 Sistematika Penulisan
Untuk memudahkan penulisan dan penggunaan laporan, disusunlah suatu sistematika penulisan. Sistem penulisan dalam laporan kerja praktek ini terbagi
menjadi beberapa bab. Bab-bab tersebut dibagi menjadi beberapa sub bab yang akan membahas mengenai hal-hal pokok. Bagian-bagian tersebut antara lain :
BAB I : PENDAHULUAN
Pada bab ini terdapat pembahasan mengenai latar belakang, tujuan kerja praktek, target kerja praktek, serta sistematika laporan.
BAB II: TINJAUAN UMUM PERUSAHAAN
Bab ini membahas mengenai profil singkat perusahaan yang mencakup sejarah singkat perusahaan, visi dan misi, struktur organisasi, fasilitas perusahaan, peran nasional serta internasional perusahaan dan informasi lainnya mengenai perusahaan.
BAB III: KEGIATAN KERJA PRAKTEK DAN PEMBAHASAN Bab ini akan membahas mengenai kegiatan yang dilakukan ketika kerja praktek dan pembahasan topik yang dipilih.
BAB IV : KESIMPULAN
Bab ini berisikan mengenai kesimpulan dari laporan kerja praktek serta saran yang akan diberikan setelah dilakukannya kerja praktek.
DAFTAR PUSTAKA
Pada Daftar Pustaka akan berisiskan mengenai semua sumber referensi yang digunakan untuk membantu pengerjaan laporan kerja praktek.
LAMPIRAN
Pada lampiran akan berisikan mengenai Log Book yang merupakan catatan aktivitas kegiatan selama pelaksanaan kerja praktek berlangsung serta dokumentasi dari segala macam hal yang terkait saat terlaksananya kerja praktek ini.
4
BAB II
TINJAUAN UMUM PERUSAHAAN
3.1 Profil Perusahaan
3.1.1 Sejarah Perusahaan dan Prokpektus Perusahaan
Garuda Maintenance Facility Aero Asia (GMF AeroAsia) merupakan salah satu anak cabang dari perusahaan Garuda Indonesia yang diresmikan pada tanggal 26 April 2002. Bisnis utama PT. GMF AeroAsia adalah penyediaan jasa perawatan dan perbaikan pesawat terbang yang mencakup rangka pesawat, mesin, komponen dan jasa pendukung lainnya secara terintegrasi atau dikenal dengan bisnis Maintenance, Repair, and Overhaul (MRO).
Sebagai unit bisnis, PT. GMF AeroAsia terus mengembangkan diri dengan meningkatkan fasilitas perawatan, infrastruktur, dan kompetensi personil yang mampu mendukung on time performance dalam melaksanakan perawatan dan perbaikan pesawat terbang dengan ground time minimum serta tingkat efisiensi yang tinggi sehingga dapat bersaing dalam memperoleh kepercayaan maskapai penerbangan lainnya.
Kemampuan PT. GMF AeroAsia semakin diakui dengan keberhasilannya merih sertifikasi DKU-PPU (Direktorat Kelaikan Udara dan Pengoperasian Pesawat Udara), FAA (Federal Aviation and Administration) dan EASA (European Aviation Safety Agency). Sejak tahun 1974, PT. GMF AeroAsia sudah mampu merawat pesawat F-28 dan DC-9. Pada akhir tahun 1990, PT. GMF AeroAsia sudah dapat melaksanakan overhaul pesawat A300, DC10, dan B747. Lalu pada akhir tahun 1993, PT. GMF AeroAsia juga mampu merawat D-chechk untuk pesawat B-737.
Saat ini, PT. GMF AeroAsia telah memasuki bidang jasa perawatan
Industrial Gas Turbine Engine (IGTE) serta perawatan Industrial Generator Overhaul, yang diharapkan menjadi sumber pendapatan baru disamping
akhirnya, PT. GMF AeroAsia mampu menjadi perusahaan yang memberikan jasa
total solution untuk pesawat, baik dalam bidang Aviation maupun non-Aviation.
3.1.2 Visi dan Misi Perusahaan
Adapun Visi yang junjung oleh PT. GMF AeroAsia ialah : “ To become the world class MRO of customer’s choice 2015.”
Visi diatas dapat diartikan kedalam bahasa indonesia yaitu PT. GMF AeroAsia menjadi perusahan MRO berkelas dunia sebagai pilihan konsumen. Visi tersebut dibuat agar dapat mewujudkan mimpi atau tujuan perusahaan dalam bidang strategis yang dikenal dengan “Global Challenge”. Global Challenge terdiri dari tiga tahapan dan saat ini PT. GMF AeroAsia telah memasuki tahap kedua dari program Global Challenge tersebut setelah melewati tahap pertama dan mempersiapkan landasan yang kokoh untuk tahap berikutnya.
Misi : “ To provide integrated and reliable Maintenance, Repair, and
Overhaul solutions for a safer sky and secured-quality of life of mankind.”
Misi tersebut dapat diartikan bahwa PT. GMF AeroAsia menyediakan solusi Maintenance, Repair, and Overhaul (MRO) yang terintegrasi dan andal untuk keamanan udara dan menjamin kualitas hidup manusia.
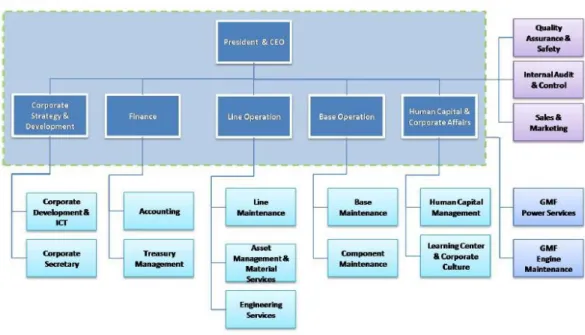
3.1.3 Struktur Organisaasi Perusahaan
Gambar 2.1Struktur organisasi PT. GMF AeroAsia
PT. GMF AeroAsia dipimpin oleh seorang President and CEO (Chief
Executive Officer) yang saat ini dijabat oleh Bapak Richard Budihadianto
Sukadarisman. Seorang President and CEO membawahi secara langsung divisi
Corporate Development and Marketing, Finance, Base Operation, dan Human Capital and Corporate Affair. Selain itu, Presiden and CEO dibantu oleh tiga
orang Vice President diantaranya VP Quality and Assurance, VP Internal Audit
and Control serta VP Corporate Secretary.
Berikut pembagian tugas masing-masing bagian pada struktur organisasi PT. GMF AeroAsia:
a. President and CEO
Bertugas memimpin jalannya perusahaan dan memberi arahan untuk mencapai sistem perusahaan yang terintegrasi serta mampu meningkatkan pelayanan di bidang maintenance pesawat terbang.
b. Quality and Assurance
Bagian ini bertugas untuk mengontrol dan memfasilitasi berbagai hal berkaitan dengan keamanan dan kinerja sistem yang dijalankan pada perusahaan sehingga kualitas dari pelayanan tetap terjaga.
c. Internal Audit and Control
Melakukan kontrol dan audit secara berkala untuk memastikan setiap kegiatan administrasi yang dilakukan sesuai dengan prosedur yang ada.
d. Corporate Secretary
Mengawasi setiap administrasi kesekretariatan yang masuk dan keluar pada perusahaan.
e. Corporate Development and Marketing
Melakukan proses pemasaran dan penjualan untuk mendapatkan proyek dari berbagai pihak untuk menjaga stabilitas PT. GMF AeroAsia. Serta melakukan perencanaan strategis dan pengembangan dalam hal proses bisnis untuk mencapai terobosan-terobosan baru guna meningkatkan kualitas bisnis.
f. Finance
Mengawasi setiap proses keuangan pada PT. GMF AeroAsia sehingga proses menganggarkan dan mengkalkulasi biaya dapat berjalan dengan baik.
g. Base Operation
Bertugas mengatur Aircraft Base Maintenance untuk mencapai produk layanan yang berkualitas dengan biaya dan Turn Around Time yang telah
ditargetkan.
h. Human Capital and Corporate Affair
Bertugas mengatur segala hal yang berkaitan dengan pengelolaan sumber daya manusia yang ada di dalam perusahaan serta sebagai representative dan penyusun strategi dalam membina relasi antar perusahaan.
3.1.4 Fasilitas Perusahaan
Fasilitas produksi PT. GMF AeroAsia berada dikawasan Bandar Udara Soekarno-Hatta, Cengkareng. Menempati lahan seluas 92,54 ha di dalam kawasan berikat dan non-kawasan berikat, fasilitas PT. GMF AeroAsia yang merupakan salah satu terbesar di Asia ini terdiri dari area publik dan servis sosial, perkantoran, perbengkelan (workshop), hangar pesawat, pergudangan, power
house, industrial waste water treatment, dan Ground Support Equipment (GSE).
3.1.4.1 Hangar
PT. GMF AeroAsia mempunyai 3 buah hangar, yaitu hangar 1, hangar 2, dan hangar 3 yang masing-masing digunakan untuk tipe perawatan pesawat yang berbeda.
Gambar 2.2 Hangar I
Hangar 1 digunakan untuk perawatan pesawat yang berbadan lebar (wide
Body) mampu memuat 2 pesawat terbang berbadan lebar dalam waktu yang
bersamaan. Hangar 2 digunakan untuk melakukan perawatan ringan (light
maintenance) yaitu A-check dan B-check.
Gambar 2.3 Hangar II
Hangar 2 dapat memuat 3 pesawat terbang berbadan lebar dalam waktu yang bersamaan. Dan hangar 3 digunakan untuk melakukan perawatan berat (heavy mainntenance) yang mempunyai luas yang sama dengan hangar 2.
Gambar 2.4 Hangar III
3.1.4.2 General Store
Tempat yang berfungsi menyediakan komponen-komponen (spare part) pesawat terbang baik untuk Garuda Indonesia itu sendiri mapun pesawat terbang lainnya yang sedang di perbaiki di PT. GMF AeroAsia.
3.1.4.3 Workshop Building
Workshop Building terdiri atas 2 bagian yaitu Workshop 1 yang
merupakan tempat untuk perawatan komponen-komponen struktur, rem, ban, peralatan kabin, serta landing gear, dan Workshop 2 yang merupakan tempat untuk perawatan avionik seperti alat-alat komunikasi, navigasi, epralatan elektronik. Workshop 2 digunakan untuk perawatan hidraulic, peumatic, dan bahan bakar.
3.1.4.4 Ground Support Equipment (GSE) Building
Tempat perawatan dan perbaikan semua peralatan penunjang proses perawatan pesawat terbang.
3.1.4.5 Spesial Store
Tempat yang digunakan untuk menyimpan bahan-bahan kimia dan bahan bakar pesawat terbang.
3.1.4.6 Industrial Waste Treatment
Tempat yang digunakan untuk menampung limbah-limbah, baik dari pesawat terbang, bengkel, dan sampah berada di Industrial Waste Treatment.
3.1.4.7 Apron
Tempat ini digunakan untuk memarkirkan pesawat terbang, selain itu juga digunakan sebagai tempat pencucian pesawat terbang dan engine run-up.
3.1.4.8 Engine Maintenance
Perbaikan-perbaikan atau perawatan engine yang sifatnya shop visit dilakukan di tempat ini.
3.1.4.9 Engine Test Cell
Tempat yang digunakan untuk pengujian APU (Auxilary Power Unit) dan engine dengan menggunakan komputer.
3.1.5 Peran Nasional dan Internasional Perusahaan
Sebagai sebuah unit bisnis, PT. GMF AeroAsia mengalami perkembagan yang cukup cepat. GMF melayani berbagai proyek maintenance pihak ketiga yaitu pihak diluar Garuda Airlines. Hal ini menjadikan PT. GMF AeroAsia sebagai salah satu perusahaan yang terpercaya dan menyandang predikat sebagai salah satu perusahaan Maintenance Repair and Overhaul terbesar didunia. Klien dan customer GMF meliputi perusahan airlines dan perusahaan industri. Klien tetap dari perusahaan airlines domestik diantaranya adalah :
Garuda Indonesia Mandala Airlines Lion Air Merpati Nusantara Batavia Air Cardig Air
Sriwijaya Air Pelita Air Service Citilink Republic Express Air Sedangkan klien dari worldwide diantaranya adalah :
ACG Acquisition XX LLC, USA
Aercap Group Services.Bu, Netherland
Air Asia, Malaysia
Air Atlanta, Islandic
Phuket Airlines, Thailand
Pulmantur Air, Spain
Sahara Airline, India
Korean Airlines, Korea, dan masih banyak lagi.
Selain maskapai penerbangan PT. GMF juga mempunyai klien dari perusahaan yang bergerak pada bidang pembangkit listrik maupun gas turbin, antara lain :
PLN (Persero) Pembangkitan Sektor Sumatera Bagian Selatan
PLN (Persero) Pembangkitan Sektor Sumatera Bagian Utara
PLN (Persero) Indonesia Timur
Indonesia Power (IP) all power plants
PJB UP Gresik
PJB UP Muara Karang
Indonesia Power Unit Bisnis Pemeliharaan
Indonesia Power UBP Bali
Indonesia Power UBP Semarang
Sulzer Hickam Indonesia
PKT Kaltim
Unindo
NUSCACO
Pertamina EP
Pertamina EP Region Jawa
Medco Power
12
BAB III
PELAKSANAAN KERJA PRAKTEK LAPANGAN
3.1 Rangkuman Jenis Pekerjaan dan Waktu Pelaksanaan PKL
Kegiatan Kerja Praktek dilaksanakan di salah satu unit GMF yaitu SBU
Power Services selama 6 minggu yang dimulai sejak tanggal 21 Juli – 05
September 2014. SBU Power Services merupakan salah satu unit di GMF yang bergerak dibidang non-Aviation, unit ini memfokuskan diri dalam perbaikan dan perawatan Industrial Gas Turbine Engine yang memiliki Visi dan Misi sebagai berikut.
Visi : “To Be One of The Indonesian Leading Maintenance Repair and
Overhaul of Indusrial Gas Turbine Engine and Related Accessories in 2015”.
Misi : “Provide high quality product, meet promised turn around time
and competitive price of maintenance repair and overhaul of industrial gas turbine engine and related accessories”.
TZP merupakan tempat dimana kegiatan kerja praktek berlangsung. TZP bagian Part Repair yaitu sebuah divisi yang menangani perbaikan bagian-bagian dari Turbine Engine. Proses dimulai dari primery inspection, blasting, inspeksi NDT (Non Destructive Test), welding, dresing, hingga coating dan blasting kembali. Semua proses dilakukan secara manual dan berurutan. Pada bagian proses coating terdapat alat bantu yaitu Plasma Spray Coating Sulzer Metco plasma 9MC dengan ABB IRB 2600 Robotic System. Sistem akan membantu pekerjaan selama proses coating yang awalnya dilakukan secara manual oleh pekerja (operator). Kehadiran sistem ini diharapkan mampu meningkatkan produktivias dan mengefisiensikan waktu dalam pekerjaan. Plasma Spray Coating Sulzer Metco plasma 9MC dengan ABB IRB 2600 Robotic System terdiri dari
Plasma Gun Spray, HVOF System (High Velocity Oxygen Fuel), dan ABB IRB
2600 Robotic System.
Selama kegiatan kerja praktek berlangsung, penulis berkesempatan untuk mempelajari ABB IRB 2600 Robotic System yang digunakan ketika proses
Tak hanya mempelajari sistem robot, penulis juga berkesempatan untuk turut serta dalam menangani maintenance mesin-mesin industri yang digunakan. PMI (Preventive Maintenance Instrucsion) adalah salah satu jenis perawatan yang dilakukan secara berkala oleh teknisi. Tujuan dari PMI ini adalah menghindari tingkat perbaikan yang semakin tinggi. Sebelum mencapai perbaikan sebaiknya dilakukan perawatan secara berkala. PMI dilakukan pada mesin mesin welding,
blasting, dan coating, hal yang dilakukan ialah dengan memeriksa wiring, motor,
dan mengoperasikannya sesuai dengan prosedur, serta mengganti jika terdapat kerusakan. Uraian kegiatan selama pelaksanaan kerja praktek berlangsung dapat dilihat pada logbook (terlampir).
3.2 Pembahasan 3.2.1 Pegertian Coating
Coating adalah pelapisan yang diterapkan pada permukaan suatu benda
atau substrat. Proses coating adalah salah satu proses yang sangat dibutuhkan dalam dunia industri. Tujuan dari coating sendiri adalah untuk dapat meningkatkan sifat permukaan dari benda yang dilapisi. Sifat permukaan tersebut diharapkan dapat ditambah dalam beberapa hal seperti penampilan, ketahanan terhadap air atau pengkaratan, ketahanan dari goresan atau bahkan untuk keausan serta mampu bertahan pada suhu yang sangat tinggi.
Proses coating diharapkan dapat menambah daya tahan peralatan atau mesin pada dunia industri. Salah satu penggunaan coating adalah untuk turbin pada Pembangkit Listrik. Coating tersebut akan melindungi turbin dari suhu yang tinggi. Banyak jenis untuk proses coating yang terdapat didunia industri, salah satunya adalah untuk proses coating part-part engine turbine. Proses coating pada
part-part Turbine Engine ini bertujuan untuk melindungi dari korosi serta tahan
terhadap suhu panas yang tinggi. Proses ini dilalukan dengan sistem HVOF (High
Velocity Oxygen Fuel).
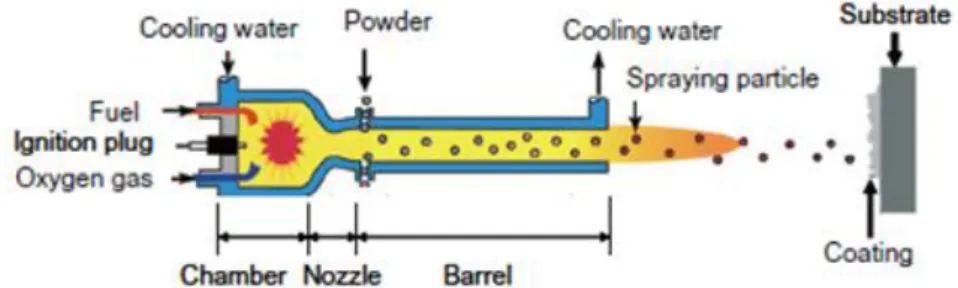
3.2.2 Sistem HVOF (High Velocity Oxygen Fuel)
Turbin gas merupakan bagian dari pembangkit tenaga listrik, dalam operasinya sering kali menemui kendala-kendala yang disebabkan
adanyabeberapa komponen dari turbin gas mengalami kerusakan akibat temperatur kerja yang tinggi (850-1070°C), sehingga turbin beroperasi tidak optimal. Nozzle adalah alat untuk mengekspansikan fluida sehingga kecepatannya bertambah. Fungsi sekunder dari nozzle ini adalah untuk memberikan dorongan yang pada bagian ini terjadi proses pembakaran antara bahan bakar dengan fluida kerja yang berupa udara bertekanan tinggi dan bersuhu tinggi. Kerusakan yang dapat dialami oleh suatu nozzle pada turbin adalah korosi akibat temperatur tinggi dan keausan. Metoda yang digunakan untuk melindungi nozzle dari masalah kerusakan yaitu dengan HVOF (High Velocity Oxygen Fuel) menggunakan material cobalt base superalloy atau Chromium Carbide/Nickle. Temperatur nyala proses HVOF adalah antara sekitar 2300oC sampai sekitar 3000oC. Partikel tersebut kemudian didorong keluar dari nosel gun dengan kecepatan lebih dari 1350 m/s menuju substrat atau forming die. Bahan bakar yang dapat digunakan adalah gas propana.
Proses HVOF thermal spray merupakan proses yang menggunakan pembakaran gas campuran bahan bakar dan oksigen sebagai sumber panas untuk melelehkan partikel pelapis yang kemudian didorong dan di akselerasikan ke permukaan substrat. Sistem ini juga dikenal dengan diamond jet HVOF thermal
spraying yang merupakan teknik deposition flame dimana powder dilelehkan
dengan pembakaran gas oksigen dan bahan bakar dan didorong dengan kecepatan Gambar 3.1 Plasma Gun Spray
tinggi oleh udara bertekanan ke permukaan substrat. Pada daerah pembakaran,
powder memasuki nyala api sehingga meleleh atau setengah meleleh bergantung
pada temperatur leleh dan laju pemakanan material. Temperatur nyala proses HVOF adalah antara sekitar 2300oC sampai sekitar 3000oC. Partikel tersebut kemudian didorong keluar dari nosel gun dengan kecepatan lebih dari 1350 m/s menuju substrat atau forming die .
Campuran bahan bakar gas dan oksigen dimasukkan ke dalam ruang pembakaran, di mana mereka dinyalakan dan dibakar terus menerus. Gas panas yang dihasilkan di dekat tekanan untuk 1 bersumber MPa melalui nosel
divergen-konvergen dan perjalanan melalui bagian yang lurus. Bahan bakar dapat gas
(hidrogen, metana, propana, propylene, asetilena, gas alam, dll) atau cairan (minyak tanah, dll). Contoh reaksi kimia proses pembakaran dengan bahan bakar propan sebagai berikut :
Propan + Oksigen → air + Karbon dioksida + panas
Setelah pembakaran, propan dan oksigen membentuk air dan gas karbon dioksida. Karena temperatur deposisi yang tinggi,air menguap. Energi dari reaksi kimia dikonversikan menjadi panas dan tekanan, yang digunakan untuk melelehkan dan mempercepat partikel powder bersama gas pembawa. Kecepatan jet di pintu keluar dari laras (> 1000 m / s) melebihi kecepatan suara. Sebuah bahan baku bubuk disuntikkan ke dalam aliran gas, yang mempercepat bubuk sampai 800 m / s. Aliran gas panas dan bubuk diarahkan permukaan yang akan dilapisi. Serbuk sebagian meleleh di sungai, dan deposito di atas substrat. Lapisan yang dihasilkan memiliki porositas rendah dan kekuatan ikatan yang tinggi. Coating HVOF mungkin setebal 12 mm (1 / 2 "). Hal ini biasanya digunakan untuk deposit memakai dan lapisan tahan korosi pada bahan, seperti lapisan keramik dan logam. bubuk umum termasuk WC-Co, karbida kromium, MCrAlY, dan alumina. Proses ini telah paling berhasil untuk penyimpanan bahan keramik logam (WC-Co, dll) dan paduan tahan korosi lainnya (baja tahan karat, paduan berbasis nikel, aluminium, hidroksiapatit untuk implan medis, dll). Material Pelapis yang digunakan pada aplikasi pelapisan temperatur tinggi, ketahanan aus,
dan ketahanan korosi suhu tinggi / oksidasi adalah cobalt base superalloy atau
Chromium Carbide/Nickle. (wikipedia,2011).
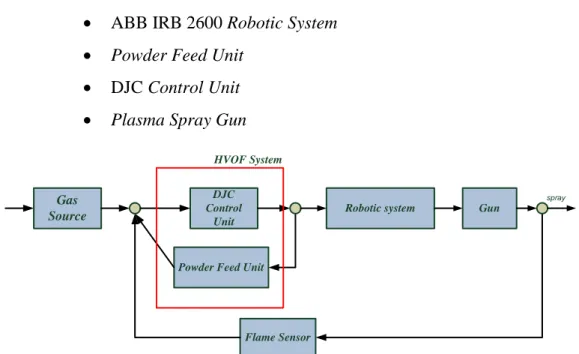
3.2.3 Plasma Spray Coating with ABB IRB 2600 Robotic System
Plasma Spray Coating with ABB IRB 2600 Robotic System merupakan
sistem yang digunakan oleh PT. GMF unit SBU Power Services untuk melakukan proses coating pada bagian-bagian Turbine Engine. Sistem ini terdari :
ABB IRB 2600 Robotic System
Powder Feed Unit
DJC Control Unit
Plasma Spray Gun
Gas Source DJC Control Unit Gun
Powder Feed Unit
Robotic system
Flame Sensor HVOF System
spray
Gambar 3.2 Blok diagram Plasma Spray Coating with ABB IRB 2600 Robotic System
Cara kerja dari sistem ini ialah sumber gas masuk kedalam DJC Control
Unit. Disini tekanan udara, oksigen, dan gas lainnya diatur sesuai dengan yang
dibutuhkan untuk proses coating. Oksigen diatur dengan tekanan 150 psi, udara sebesar 165 psi, dan gas lainnya seperti hidrogen, nitrogen atau argon masing-masing 150 psi.
Gambar 3.3 Diamond Jet DJC Control Unit
Setelah masing-masing gas diatur tekanannya, gas akan masuk kedalam
Powder Feed Unit (PFU) yang merupakan tempat beradanya powder (feedstock)
untuk coating. Powder Feed Unit ini akan mengatur keluarnya powder beserta gas lainnya. Ketika terdapat parameter yang tidak sesuia pada Powder Feed Unit ini, maka mesin ini akan memberikan sinyal kepada DJC Control Unit untuk menghentikan proses berikutnya . begitupula ketika semua parameter tekanan gas, air, dan powder sudah tercapai, PFU akan memberikan feedback ke DJC Control
Unit agar dapat menyalakan plasma gun spray.
Alat penyemprot atau Plasma spray gun terdiri dari komponen logam tungsten (W) sebagai katoda dan tembaga (Cu) sebagai anoda. Kedua anoda tersebut didinginkan oleh air agar tidak terjadi perubahan struktur komponen karena suhu plasma yang dihasilkan sangat tinggi yaitu sekitar 32000 K pada busur plasma keluarannya.
Gambar 3.4 Proses pada Plasama Gun Spray
Plasma gas yang terdiri dari gas oksigen, argon atau nitrogen, dan hidrogen mengalir di sekitar katoda dan melalui anoda membentuk pola nozzle yang menyempit. Pembentukan plasma diawali dengan adanya tegangan tinggi dari listrik yang menyebabkan ionisasi lokal dan menghasilkan busur konduktif di antara anoda dan katoda. Pemanasan gas oleh busur menyebabkan gas mengalami ionisasi membentuk plasma. Plasma yang keluar dari nozzle anoda merupakan plasma netral yang tidak memiliki muatan. Kemudian feedstock diinjeksikan melalui sebuah nozzle lain dari satu ataupun dua arah (atas dan bawah). Feedstock berupa ZrO2 serbuk dilelehkan oleh plasma kemudian dihambur dengan kecepatan tinggi menuju substrat. Jarak penyemprotan umumnya sekitar 25-150mm.
Setelah Plasma gun spray sudah menyala yaitu dalam kondisi preheat dimana Gun secara berkala akan meninggikan tekanan dan menaikkan suhu. Lalu, operator akan menjalankan robot menggunakan Flexperndant sesuai dengan program yang telah dibuat sebelumnya pada robot. Pergerakan robot dapat diatur dengan membuat program secara langsung pada robot ataupun melalui software RobotStudio.
3.2.4 ABB IRB 2600 Robotic System
ABB IRB 2600 Robotic System merupakan sebuah sistem terintegrasi yang terdiri atas Robot ABB tipe IRB 2600, IRC5 Controller, dan FlexPendant. Ketiga komponen ini merupakan satu kesatuan dalam Robotic System ini. Adanya ABB IRB 2600 Robotic System ini banyak membantu idustri dalam menpercepat
pengerjaan serta mengurangi tingkat kecelakaan kerja. Perawatan untuk sistem ini pun terbilang cukup mudah, dengan jangka waktu realibilitas yang tinggi mampu menekan biaya perawatan maupun pra perawantan (Preventive Maintenance).
Foundry Plus 2 merupakan salah satu keunggulan yang dimiliki oleh sistem ini.
Didesain ramah lingkungan serta mempunyai daya tahan yang lama dalam pengoperasiannya.
Sistem robot dapat diprogram dengan 2 cara, yaitu membuat program secara langsung pada robot menggunakan FlexPendant atau dengan software
offline RobotStudio. Membuat program melalui RobotStudio, terlebih dahulu
membuat simulasi robot serta benda kerja yang akan di kerjakan, kemudian membuat program dengan RAPID.
3.2.4.1 Robot ABB IRB 2600
Robot ABB merupakan robot industri yang diproduksi oleh ABB
Robotics Coorporation. Robot ini banyak digunakan oleh industri-industri besar
seperti otomotif, welding industrial, dan industri-industri lainnya yang berkecimpung dalam dunia pengelasan, assembly, coating, machining, serta Arc
welding applications. Robot ABB mempunyai Operating System tersendiri yaitu
RobotWare atau RobotStudio.
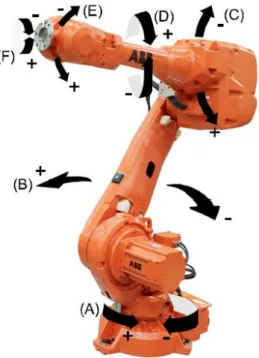
Robot ABB IRB 2600 merupakan robot Foundry yang mempunyai kegunaan utama untuk mesin perawatan (machine tending), penanganan meterial (material handling), las api (arc welding), mesin pemotong (machine cutting),
assembly, palletizing and packing, measuring, and coating. Robot ini memiliki 6
Gambar 3.5 Axis Robot ABB IRB 2600
Tabel 3.1 Axis Robot ABB IRB 2600
Berikut spesifikasi dari robot ABB IRB 2600
Tabel 3.2 Spesifikasi Robot IRB 2600 Kegunaan utama
Mesin perawatan (Machine tending), material handling, arc welding,Mesin pemotong (Machine cutting), dispensing, assembly, palletizing and packing, Pengukuran (measuring), and coating
Spesifikasi
Jenis Jangkauan Muatan Beban
keseluruhan
IRB 2600 1.65m 12kg 15kg
Protection Standar IP7; optional FoundryPlus 2
Pos Deskripsi Pos Deskripsi
A Axis 1 B Axis 2
C Axis 3 D Axis 4
Penempatan Lantai, dinding, papan, dimiringkan, dibalikkan IRC5 Controller Single Cabinet Kondisi Fisik
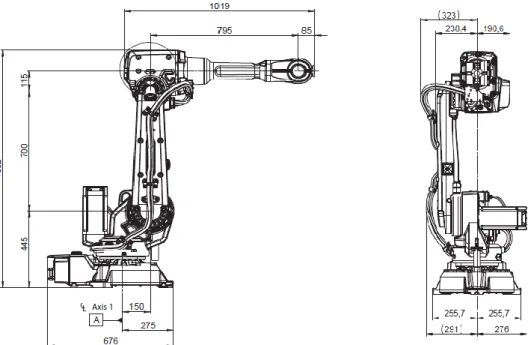
Dimensi Bentuk Dasar 676 x 511
Tinggi Robot 1382 mm
Berat Robot 272 to 284 kg
Performance (Berdasarkan kepada ISO 9283)
Position repeatability (RP) 0.04mm
Path repeatability (RT) 0.13mm Perpindahan
Perpindahan Axis Workking
range Maximum speed Axis 1 +180⁰ to -180⁰ 175 ⁰/s Axis 2 + 155⁰ to -95⁰ 175 ⁰/s Axis 3 +75⁰ to -180⁰ 175 ⁰/s Axis 4 +400⁰ to -400⁰ 360 ⁰/s Axis 5 +120⁰ to -120⁰ 360 ⁰/s Axis 6 +400⁰ to -400⁰ 360 ⁰/s Electrical connections Sumber Tegangan 200-600V, 50-60 Hz Enviroment
Ambient temperatur for mechanical unit
Selama pengoperasian +5⁰C (41⁰F) to +45⁰C(113⁰F)
Selama penyimpanan -25⁰C (-13⁰F) to +55⁰C
Gambar 3.7 Gambar jangkauan robot ABB IRB 2600 Gambar 3.6 Gambar Dimensi Robot ABB IRB 2600
3.2.4.2 IRC5 Controller
IRC5 Controller berisikan seluruh fungsi yang dibutuhkan untuk menggerakkan dan mengatur robot. IRC5 Controller terdiri atas single cabinet,
single cabinet controller. Selain single cabinet IRC5 controller juga mempunyai
tipe dual cabinets. Dimana cabinet pertama terhubung dengan controller dan
cabinet kedua terintegrasi dengan sistem lainnya.
Sebuah controller terdiri atas dua modul, yaitu modul pengendali (control) dan modul drive. Module control terdiri atas control electronic sebagai komputer utama, papan I/O, dan flash memory. Control module akan menjalankan seluruh software yang dibutuhkan ketika sedang mengoperasikan robot. Drive
module terdiri atas daya listrik yang akan disupply ke motor robot. IRC5 drive module dapat men-drive 9 unit motor serta dapat menangani 6 axes internal
ditambah 2 atau axis tambahan sesuai dengan tipe robot. Ketika sedang mengoperasikan lebih dari satu robot dengan menggunakan satu controller, maka
drive modulei harus ditambahkan juga sebagai tambahan pada robot, namun tetap
menggunakan satu modul control.
IRC5 Controller merupakan sumber listrik untuk mejalankan robot dan
FlexPendant. Alat ini yang akan mengolah data ataupun instruksi lainnya pada FlexPendant agar dapat dilakukan oleh robot sesui dengan perintah yang
diberikan. IRC5 Controller juga dapat mengolah sinyak ketika terjadi suatu yang tidak sesuai dengan perintah, dan secara otomatis akan menghentikan pergerakan robot.
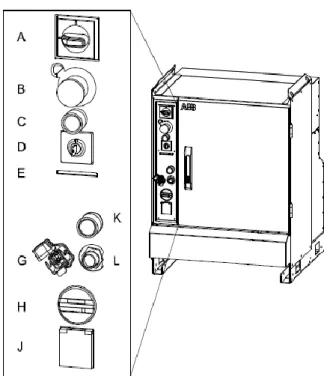
Gambar 3.8 Tombol pada IRC5 Controller
Keterangan :
A : Tombol utama (On/Off) untuk menghidupkan dan mematikan IRC5 Controller.
B : Tombol darurat (Emergency stop). Tombol yang digunakan ketika tejadi sesuatu yang darurat.
C : Lampu indikator untuk motor.
D : Tombol Mode.
E : Safety chain LEDs.
F : USB port.
G : Service port for PC.
J : Service outlet 115/230 V, 200W.
K : Hot plug button.
L : konektor untuk Flexpendant.
3.2.4.3 FlexPendant
FlexPendant adalah sebuah alat yang diberfungsi untuk mengontrol serta
memberikan tugas termasuk ketika robot sedang beroperasi : menjalankan program, jogging the manipulator, memodifikasi program robot dan lain sebagainya. FlexPendant didisain untuk dapar beroperasi pada lingkungan industri yang berbahaya sekalipun, serta menggunakan layar sentuh untuk memudahkan dalam pengoperasian serta tahan terhadap air, minyak dan percikan las.
FlexPendant terdiri atas dua perangkat keras dan lunak komputer secara
penuh yang ada didalamnya. Alat ini merupakan bagian dari IRC5, menghubungkan ke controller melalui integrated cable yang ada didalamnya.
Keterangan:
A : Connector E : USB port
B : Touch screen F : Enabling device
C : Emergency stop button G : Stylus pen
D : Joystick H : Reset button
Gambar 3.10 Hard Button pada FlexPendant
Keterangan :
A-D : Programmable keys, 1-4.
E : tombol untuk memilih mechanical unit
F : Toggle motion mode, reorientasi atau linear
G : Toggle motion mode, untuk memilih axis 1-3 atau axis 4-6
H : Toggle increments
J : Step BACKWARD button.
K : START button. Tombol untuk memulai eksekusi program
M : STOP button. Tombol untuk menghentika program yang sedang dieksekusi.
FlexPendant biasanya dioperasikan saat berada di tangan.tangan kiri
digunakan untuk memegang FlexPendant kemudian tangan kanan untuk mengoperasikannya. Berikut cara memegang FlexPendant :
Gambar 3.11 Cara memegang FlexPendant
Untuk mengoperasikan atau menjalankan program maka tombol enabling
device pada FlexPendant harus di tekan, jika tidak maka motor pada robot tidak
akan berjalan. Joystick digunakan untuk menggerakkan robot sesuai dengan axis yang dipilih.
3.2.5 RobotStudio
RobotStudio adalah sebuah aplikasi PC untuk permodelan, pemrograman
offline, dan simulasi dari sbuah robot. RobotStudio tersedia dalam beberapa versi,
yaitu versi lengkap, versi interconnection, dan versi minimal installation. Minimal
installation digunakan untuk dapat bekerja ketika terhubung pada controller
(sebagai pelengkap pada FlexPendant). Versi lengkap dan interconnection menyediakan untuk penggunaan tingkat lanjut.
Ketika RobotStudio terhubung secara langsung pada controller yang sebenarnya, maka software ini akan berfungsi sebagai berikut :
1. Membuat atau menciptakan , memasang, dan menjaga sistem dengan menggunakan system builder.
2. memprograman dan mengedit program menggunakan editor cepat 3. mengatur file pada controller.
4. Administrasi pengguna pada Authorization System.
RobotStudio dapat digunakan tanpa harus terhubung dengan controller, yang dalam hal ini adalah IRC5 controller namun bisa digunakan pada sistem komputer (PC). RobotStudio banyak digunakan untuk mensimulasikan kegiatan robot dalam skala industri karena selain dapat memprogram, software ini juga mampu untuk mendesain peletakan komponen mesin-mesin industri ataupun robot industri beserta peralatan lainnya dan dapat diopresikan secara simulasi pada komputer. RobotStudi dapat diunduh secara opern source pada situs ABB Robotics.
3.2.6 Membuat Tooldata, Wobj, dan Menentukan Titik Awal
Program yang akan dibuat pada robot tidak akan berjalan dengan optimal sebelum robot diatur penggunaannya. Hal yang harus diperhatikan sebelum membuat gerakan robot atau membuat program untuk mengerjakan suatu routine ialah membuat data tool yang dibawa oleh robot, membuat data benda kerja, dan menentukan titik awal pada robot. Ketiga hal tersebut wajib dilakukan ketika akan membuat suatu program, hal ini bertujuan agar pergerakan pada robot dapat berjalan sesuai dengan peritah/instruksi dan memiliki ketepatan dalam geraknya.
Tool yang dibawa mempunyai berat dan dimensi yang berbeda untuk setiap jenis. Robot memerlukan data untuk setiap alat yang dibawanya guna menyelaraskan gerak serta menghitung secara otomatis beban keseluruhan. Berikut langkah dalam membuat data alat (tooldata).
1. Klik menu ABB.
3. Untuk membuat data tool yang baru maka pilih New, kemudian berikan nama pada data tool tersebut. Lalu tekan OK.
4. Pilih menu Edit, kemudian klik Define.
5. Tentukan jenis cara kalibrasi untuk robot dan tool yang dibawa pilih TCP & Z,X .
6. Menentukan titik 1, titik 2, titik 3, titik 4, titik elengator point X, titik elengator point Y. Titik ini di tentukan secara posisi
sembarang namun tetap pada satu titik acuan. Gunakan benda kerja yang memiliki bentuk lancip pada bagian ujung seperti jarum atau yang lainnya untuk diletakkan di tool yang dibawa robot dan pada meja kerja. Hal ini bertujuan untuk mendapatkan ketepatan pada titik acuan.
Gambar 3.12 Menentukan TCP (Tool Center Point)
7. Klik Modify Position ketika titik telah ditentuan untuk setiap bagiannya.
8. Setelah menentukan titik 1, 2, 3, dan 4 maka untuk membuat titik
dari titik acuan. Klik Modify Position. Untuk elengator point Y, tarik secara linear ke depan maupun ke belakang dari tiitk acuan. Klik Modify position.
9. Klik OK jika semua titik telah ditentukan.
Benda kerja yang akan diprogram memiliki dimensi yang berbeda, agar mempermudah ketika membuat program serta untuk menentukan titik awal (titik nol) dari benda kerja maka diperlukan data untuk setiap benda kerja yang akan dibuatkan program. Berikut langkah-langkah untuk membuat data benda kerja (Wobj)
1. Klik menu ABB.
2. Pilih menu Program Data, klik WobjData.
3. Klik New untuk membuat data benda kerja yang baru. Masukkan nama benda kerja. Pilih module dan routine yang akan digunakan untuk diprogram. Pilih dimensi dari benda kerja. Klik OK jika semua telah selesai.
4. Pilih menu Edit, klik Define.
5. Klik user method pilih “3point”. Tentukan user point X1, user
point X2, user point Y1. Klik modifiy position.
6. Klik OK jika telah selesai.
Setelah data tool dan data benda kerja dibuat, kemudian tentukan kalibrasi manual pada robot. Berikut langkah untuk kalibrasi posisi awal robot
1. Klik menu ABB.
2. Pilih menu Calibration. Kemudian pilih Update Revolutin
Gambar 3.13 Kalibrasi robot
3. Kemudian kalibrasi setiap axis dengan mengikuti garis yang telah terdapat pada masing-masing axisnya.
4. Setelah semua axis terkalibrasi, klik OK.
3.2.7 Pemrograman ABB IRB Robotic System untuk tets peice
Program pada robot ABB IRB 2600 terbagi menjadi Module dan Routine.
Module ialah kumpulan dari beberapa routine yang kelak akan dikerjakan oleh
robot. Sedangkan Routine ialah berisikan sintak maupun instruksi pada robot yang lebih spesifik. Berikut akan dijelaskan mengenai pembuatan program gerakan robot untuk Test piece.
Gambar 3.14 Tes piece yang akan diprogram
Langkah pertama yaitu menyalakan IRC5 Controller dengan memutar tombol utama ke mode On, tunggu hingga FlexpPendant dalam keadaan stanbay. Gunakan pengaturan toolData, Wobj, serta kalibrasi yang telah dilakukan sebelumnya agar mendapatkan kinerja yang optimal pada robot.
Gambar 3.15 Tampilan FlexPendant dalam kondisi stanbay
Sebelum membuat program, akan sedikit dijelaskan mengenai sintak yang akan digunakan dalam program ini. Sintak tersebut antara lain MoveL, MoveAbsj, MoveC, dan
1 2 3 4 5 6 7 8 9 10 11 12 13 14 A B C D E F G H I J
MoveJ. Program yang dibuat akan bergerak secara linear sesuai dengan benda kerja yang akan di coating yaitu plat alumunium dengan tebal 2mm dan ukuran (10cm x 12 cm).
MoveL adalah perintah untuk mengerakkan robot bergerak secara linear
dari satu titik ke titik yang lainnya. Misalnya, robot akan digerakkan dari titik A ke titik B maka yang harus dilakukan adalah pilih instruksi MoveL terlebih dahulu, tentukan posis awal (titik A). Kemudian klik modify position. Masukkan instruksi MoveL, letakkan instruksi kedua dibawah instruksi pertama. Sama halnya dengan instruksi pertama, yaitu menentukan posisi selanjutnya (titik B), kemudian pilih modify position. Berikut contoh program untuk MoveL :
Prog
MODULE coba1
PROC Routine Move_L ();
MoveL_A*, V100, Z50, GunSpray; MoveL_B*, V100, Z50, GunSpray; End Prog
A B C
Gambar 3.16 Pergerakan MoveL
MoveL* merupakan instruksi yang digunakan serta posisi yang sudah
ditentukan sebelumnya. V100 merupakan kecepatan robot yang digunakan ketika bergerak. Kecepatan ini dapat diatur sesuai dengan kebutuhan. Z50 adalah radius sebelum mencapai titik tujuan dalam hal ini robot akan membentuk radius sebesar 50mm sebelum menuju titik B. Besarnya nilai radius dapat diatur sesuai dengan kebutuhan. GunSpray adalah mode yang akan dilakukan oleh tool yang dibawa, mode dapat berupa GunSpray, Preheat, Standby, dan lain sebagainnya sesuai dengan tool yang digunakan oleh robot. Program diatas akan menggerakkan robot dari titik A ke titik B dengan kecepatan gerak sebesar 100() dan akan membentuk radius sebesar 50 mm sebelum titik B dengan mode tool GunSpray.
MoveAbsj merupakan perintah untuk menggerakkan robot kembali
keposisi Home. Sama halnya dengan MoveL, posisi Home ditentukan secara manual oleh operator sesuai dengan kondisi yang diinginka, kemudian pilih
MoveC adalah perintah untuk menggerakkan robot bergerak membentuk
sebuah radius dari satu titik ke titik yang lainnya. Perintah ini digunakan untuk benda kerja yang permukaannya cembung., cekung, maupun bentuk lain yang memiliki radius. Besarnya nilai radius dapat diatur dengan mengubah pada nilai Z.
A B C
Gambar 3.17 pergerakan MoveC
MoveJ merupakan perintah untuk menggerakan robot untuk mencari
jalan tercepat menuju titik yang telah ditentukan tanpa harus melewati titik selanjutnya. Sebagai contoh, robot diprogram bergerak melewati 5 titik yang telah ditentukan. Namun pada loop ke 2 robot akan di atur untuk bergerak dari titik A langsung menuju titik D, maka MoveJ perintah yang tepat untuk digunakan.
A B C
D E
MoveJ
Gambar 3.18 Pergerakan instruksi MoveJ
Masih banyak instruksi-instruksi lainnya dengan berbagai macam kegunannya seperti ProcCall yang berfungsi untuk memanggil program atau routine lainnya, RETURN untuk mengulangi program kembali dari awal, Reset,
Set, UntilDo, WaitUntil, dan lain sebagainya. Namun, untuk membuat program test piece hanya dibutuhkan instruksi dasar yaitu MoveL dan MoveAbsj.
Klik menu ABB. Pilih Program Editor klik module kemudian klik New
Module. Maka layar akan menampilkan seperti gambar 3.19 .
Gambar 3.19 New Module
Klik OK setelah module diberi nama dan tipe program. Setelah membuat
module, langkah selanjutnya ialah membuat routine. Klik routine pada menu Program Editor. Klik New untuk membuat routine baru.
Gambar 3.20 New Routine
Masukkan nama pada routine sesuai dengan perintah yang akan dilakukan oleh robot. Pilih module yang telah dibuat. Klik OK setelah semua selesai. Pilih menu Add instruction untuk memasukkan instruksi yang akan dikerjakan (lihat gambar 3.21).
program ini akan memerintahkan robot untuk bergerak secara vertikal dan horizontal pada benda kerja. Pilih instruksi MoveAbsj, maka akan keluar tampilan seperti berikut.
MoveAbsj *\NoEOffs, V1000, Z50, GunSpray;
Posisikan robot pada keadaan standby, lalu klik modify position. Instruksi ini akan menggerakkan robot ke titik awal (keadaan standby). Instruksi selanjutnya ialah menggerakkan robot secara vertikal dari titik 1 ke titik yang bergerak linear dengan menggunakan instruksi MoveL. Klik MoveL.
MoveL*, V100, Z50, GunSpray;
Gerakkan robot menuju titik 1. Klik modify position. Kemudian klik kembali MoveL.
MoveL*, V100, Z50, GunSpray;
Gerakkan robot menuju titik 2. Klik modify position. Lakukan hal sama untuk titik 3 hingga titik 14 sesuai dengan instruksi sebelumnya. Sehingga program akan seperti berikut .
Prog
MODULE coba1
PROC Routine Gerak_Vertikal ();
MoveAbsj *\NoEOffs, V1000, Z50, GunSpray; MoveL*, V100, Z50, GunSpray; MoveL*, V100, Z50, GunSpray; MoveL*, V100, Z50, GunSpray; MoveL*, V100, Z50, GunSpray; MoveL*, V100, Z50, GunSpray; MoveL*, V100, Z50, GunSpray; MoveL*, V100, Z50, GunSpray; MoveL*, V100, Z50, GunSpray; MoveL*, V100, Z50, GunSpray;
MoveL*, V100, Z50, GunSpray; MoveL*, V100, Z50, GunSpray; MoveL*, V100, Z50, GunSpray; MoveL*, V100, Z50, GunSpray; MoveL*, V100, Z50, GunSpray; Endprog
Selanjutnya untuk membuat gerakan horizontal, lakukan hal yang sama seperti gerakan vertikal dengan menggunakan titik 1 sebagai acuan awal. Letakkan kursor pada instruksi titik 1, kemudian pilih menu edit klik copy. Letakkan kembali kursor pada instruksi terakhir, kemudian klik paste. Maka instruksi pada titik 1 sudah di duplikasikan. Lakukan hal sama ketika membuat gerakan vertikal dari titik 1 menuju titik 2 untuk gerakan yang dimulai dari titik A ke titik B hingga menuju titik J. Sehingga hasil akhir program adalah sebagai berikut.
Prog
MODULE coba1
PROC Routine Gerak_Vertikal ();
MoveAbsj *\NoEOffs, V1000, Z50, GunSpray; ( Robot pada posisi standby)
MoveL*, V100, Z50, GunSpray; ( robot bergerak ke titik 1 )
MoveL*, V100, Z50, GunSpray; ( robot bergerak vertikal ke titik 2 )
MoveL*, V100, Z50, GunSpray; ( robot bergerak horizontal ke titik 3 )
MoveL*, V100, Z50, GunSpray; ( robot bergerak vertikal ke titik 4 )
MoveL*, V100, Z50, GunSpray; ( robot bergerak horizontal ke titik 5 )
MoveL*, V100, Z50, GunSpray; ( robot bergerak vertikal ke titik 6 )
MoveL*, V100, Z50, GunSpray; ( robot bergerak horizontal ke titik 7 )
MoveL*, V100, Z50, GunSpray; ( robot bergerak vertikal ke titik 8 )
MoveL*, V100, Z50, GunSpray; ( robot bergerak horizontal ke titik 9 )
MoveL*, V100, Z50, GunSpray; ( robot bergerak vertikal ke titik 10 )
MoveL*, V100, Z50, GunSpray; ( robot bergerak vertikal ke titik 12 )
MoveL*, V100, Z50, GunSpray; ( robot bergerak horizontal ke titik 13 )
MoveL*, V100, Z50, GunSpray; ( robot bergerak vertikal ke titik 14 )
MoveL*, V100, Z50, GunSpray; ( robot bergerak ke titik 1/A )
MoveL*, V100, Z50, GunSpray; ( robot bergerak horizontal ke titik B )
MoveL*, V100, Z50, GunSpray; ( robot bergerak vertikal ke titik C )
MoveL*, V100, Z50, GunSpray; ( robot bergerak horizontal ke titik D )
MoveL*, V100, Z50, GunSpray; ( robot bergerak vertikal ke titik E )
MoveL*, V100, Z50, GunSpray; ( robot bergerak horizontal ke titik F )
MoveL*, V100, Z50, GunSpray; ( robot bergerak vertikal ke titik G )
MoveL*, V100, Z50, GunSpray; ( robot bergerak horizontal ke titik H )
MoveL*, V100, Z50, GunSpray; ( robot bergerak vertikal ke titik I )
MoveL*, V100, Z50, GunSpray; ( robot bergerak horizontal ke titik J )
Endprog.
Setelah program selesai, untuk menjalankannya pilih menu Debug klik
PP to Routine kemudian pilih routine yg telah dibuat. Klik OK. Tekan Undifine Device dan tekan tombol START pada Flexpendant. Enabeling Device pada FlexPendant tetap ditekan selama program dijalankan.
BAB IV
KESIMPULAN
4.1 Kesimpulan
Berdasarkan pelaksanaan kegiatan kerja praktek berlangsung maka didapatka kesimpulan sebagai berikut :
Robot industri yang digunakan pada unit TZP Part Repair GMF
Power Services merupakan robot ABB IRB 2600. Robot ini
terintegrasi dengan sistem High Velocity Oxygen Fuel (HVOF). Tugas robot ini adalah sebagai penggerak Plasma Gun Spray pada proses Coating.
ABB IRB 2600 Robotic System terdiri atas IRC5 Controller,
Flexpendant, dan Robot ABB tipe IRB 2600. IRC5 Controller
merupakan tempat komunikasi antara robot dan FlexPendant.
Module control dan module drive berada pada controller. FlexPendant ialah serial komunikasi interface yang akan
memberikan input kepada robot. Operator dapat membuat program pada robot dengan menggunakan FlexPendant atau dengan memprogram secara offline melalui aplikasi komputer RobotStudio.
Program robot untuk test piece dapat dibuat dengan menggunakan
FlexPendant. Sebelum membuat program, terlebih dahulu buat
data tool, data benda kerja, serta mengkalibrasi robot pada titik awal (titik nol robot) agar robot dapar beroperasi secara optimal serta akurat dalam pergerakannya. Instruksi yang digunakan pada saat membuat program test piece plat alumunium ukuran 12 cm x 10 cm adalah MoveL dan MoveAbjs serta mengatur parameter parameter pada tiap instruksinya seperti mengatur kecepatan
gerak dengan mengubah nilai V, mengatur radius pergerakan (Z), dan mengubah mode tool.
4.2 Saran
Ruangan control robot panas dan luasnya terbatas, sebaiknya ruangan control di pasang pendingin agar mesin IRC5 Controller dan DJC Control Unit terhindar dari korosi serta kerusakan lainnya yang ditimbul akibat suhu yang panas.
Meja kerja untuk menempatkan benda kerja yang akan di coating masih manual, hal ini dapat memberikan kerugian karena posisi meja yang dapat berubah-ubah sehingga titik kerja yang semula telah dikalibrasi oleh robot menjadi berubah. Sebaiknya dibuat meja kerja yang tetap dan dapat terintegrasi dengan sistem robot agar memudahkan dalam proses pengerjaan coating.
Daftar Pustaka
ABB Robotic. (2013). Operating Manal RobotStudio. Swedia: ABB Robotic.
ABB Robotic. (2013). Operating Manual IRC5 with FlexPendant. Swedia: ABB Robotic. ABB Robotic. (2009). Product Spesification Controller IRC5 with FlexPendant. Swedia: ABB Robotic.
Fobuma. (n.d.). Material Coating. Retrieved August 30, 2014, from http://www.gordonengland.co.uk/ps.htm
Librarytama Grup. (2014, January 03). Mengenal Proses Coating. Retrieved August 30, 2014, from Librarytama Grup: http://libratama.com/mengenal-proses-coating/
Robotic, A. (2009). Product Spesification IRB 2600. Swedia: ABB Robotic.
SCI. (2012, September 29). Powder Coating : Apa dan Bagaimana ? Retrieved August 30, 2014, from SCI: http://sci-pusat.blogspot.com/2012/09/powder-coating-apa-dan-bagaimana.html
Sujono, I. (2007, May 14). Teknologi Perlindungan pada Nozzle Turbin Gas dengan Sistem HVOF Spraying. Retrieved August 30, 2014, from Meine Notizen: http://rdsujono.blogspot.com/2011/05/teknologi-perlindungan-pada-nozzle.html
LAMPIRAN
LEMBAR KEGIATAN LAPANGAN
NAMA MAHASISWA
: GUNTUR KURNIAWAN NAMA PEMBIMBING
: Dwi Harianto
NIM : 121311007 JABATAN :IGTE Part Repair Technician
NAMA PERUSAHAAN
:PT. Garuda Maintenance Facility Aero Asia
Minggu Ke-1
NO HARI,
TANGGAL
URAIAN KEGIATAN PARAF
PEMBIMBING 1 Senin, 21
Juli 2014
Mengurusi berkas-berkas administrasi
2 Selasa, 22 Juli 2014
Membuat Pas Intern
3 Rabu, 23 Juli 2014
Pengenalan lingkungan perusahaan
Pengenalan K3 di perusahaan 4 Kamis, 24
Juli 2014
Pengenalan mengenai TZP bagian part repair
Pengenalan mengenai robot ABB IRB 2600 5 Jum’at,
25 Juli 2014
Minggu Ke-2
NO HARI,
TANGGAL
URAIAN KEGIATAN PARAF
PEMBIMBING 1 Senin, 4
Agustus 2014
Melalukan maintenance dan check pada tools yang ada diindustri, serta mengkalibrasi alat ukur dan transducer yang ada
Backup data Robot ABB 2 Selasa, 5
Agustus 2014
Mempelajari manual book dari Robot ABB
Mempelajari pengoperasian Robot ABB melalui aplikasi RobotStudio sebagai simulasi
3 Rabu, 6 Agustus 2014
Mengupgrade tools industri yang ada diindustri, check & repair serta check time calibration
Mempelajari Manual Book Robot ABB dan RobotStudio
4 Kamis, 7 Agustus 2014
Belajar mengenai RobotStudio cara membuat
Newstation dan proses Jogging pada robot.
PMI (Preventive Maintenance Instructions)
Eelectrical Forklift
5 Jum’at, 8 Agustus
2014
PMI (Preventive Maintenance Instruction) Pemeriksaan komponen-komponen maupun peralatan industri
Maintenance Robot ABB pada bagian mesin
Minggu Ke-3
NO HARI,
TANGGAL
URAIAN KEGIATAN PARAF
PEMBIMBING 1 Senin, 11
Agustus 2014
Maintenance Cooling Water pada bagian Motor. Terjadi sebuah kerusakan yang diprediksi akibar beban berlebih (overload) pada pengguaannya. Motor yang dibongkar dilihat dan di cek
pengkabelannya apakah ada yang putus atau tidak serta pengukuran pundilakukan. Dengan hasil akhir bahwa motor telah rusak karena overload.
2 Selasa, 12 Agustus
2014
Mengerjakan PMI (Preventive Maintenance
Instruction) pada alat-alat kerja yang ada di tempat
praktek. PMI yg dilakukan adalah mengecek wiring
diagram pada alat-alat tersebut.
Belajar Manual Book Robot ABB IRB 2600 3 Rabu, 13
Agustus 2014
Belajar Manual Book Robot ABB IRB 2600
Ikut Maintenance Blasting Machine
4 Kamis, 14 Agustus 2014 - SAKIT 5 Jum’at, 15 Agustus 2014
Minggu Ke-4
NO HARI,
TANGGAL
URAIAN KEGIATAN PARAF
PEMBIMBING 1 Senin, 18
Agustus 2014
Melalukan maintenance dan check pada peralatan welding, PMI (Preventive Maintenance Instruction) control Oven
Mencoba program pada Robot ABB IRB 2600 2 Selasa,19
Agustus 2014
PMI (Preventive Maintenance Instructions)
Membuat Program Robot ABB IRB 2400 untuk Coating Test Lempeng besi
3 Rabu, 20 Agustus
2014
Praktek membuat program pada Robot ABB IRB 2600 untuk benda kerja lempeng besi. Program yang dibuat ialah program horizontal dan vertikal. Program ini akan digunakan untuk pada saat coating nanti.
4 Kamis, 21 Agustus
2014
Melanjutkan kegitan pada hari rabu, yaitu
membuat program pada Robot ABB IRB 2600 untuk benda kerja lempeng besi dengan gerakan Vertikal dan horizontal.
5 Jum’at, 22 Agustus
2014
Praktek cara mengkalibrasi Robot dengan Tools yang dibawa. Tools yang digunakan pada Robot ini adalah GunSpray.
Sharing dengan General Manager bagian SBU Power Services mengenai kegiatan selama
Minggu Ke-5
NO HARI,
TANGGAL
URAIAN KEGIATAN PARAF
PEMBIMBING 1 Senin, 25
Agustus 2014
Maintenance dan modifikasi mesin Blasting
Mengerjakan laporan
2 Selasa, 26 Agustus
2014
Maintenance mesin Dust Colector
3 Rabu, 27 Agustus
2014
Repair motor pada mesin oven
Praktek cara kalibrasi robot
4 Kamis, 28 Agustus
2014
Mengerjakan laporan
Sharing mengenai SBU Power Services
Maintenance mesin Blasting pada bagian pulp
electric. 5 Jum’at,
29 Agustus
2014
Menyelesaikan maintenance mesin Blasting
Uji coba mesin Blasting yang telah diperbaiki
Membuat laporan sederhana untuk hasil