Halaman Judul
FINAL PROJECT – TE 091399
TRACTION CONTROL IN PARALLEL HYBRID ELECTRIC
VEHICLE BY USING GENERALIZED PREDICTIVE
CONTROL
Ilmiyah Elrosa Citra Resmi NRP 2210 100 125
Advisor
Ir. Rusdhianto Effendi AK,MT. Eka Iskandar, ST., MT.
ELECTRICAL ENGINEERING DEPARTEMENT Faculty of Industrial Technology
Sepuluh Nopember Institute of Technology Surabaya 2014
vii
TRACTION CONTROL PADA PARALLEL HYBRID ELECTRIC VEHICLE DENGAN METODE
GENERALIZED PREDICTIVE CONTROL
Nama : Ilmiyah Elrosa Citra Resmi Pembimbing I : Ir. Rusdhianto Effendi AK,MT. Pembimbing II : Eka Iskandar, ST., MT
ABSTRAK
Dalam Hybrid Electric Vehicle, terutama pada Parallel Hybrid
Electric Vehicle (PHEV) terdapat suatu masalah, yaitu lambatnya
respons Internal Combustion Engine (ICE) apabila terjadi peningkatan kecapatan. Saat keadaan akselerasi ICE membutuhkan bantuan dari motor listrik. Karena jika tidak ada bantuan dari motor listrik dan terjadi secara terus menerus dapat mengurangi kinerja dari ICE. Oleh karena itu dibutuhkan pengaturan traksi motor listrik untuk membantu ICE dalam mencapai tingkat akselerasi yang diinginkan.
Pada Tugas Akhir ini digunakan metode Generalized Predictive
Control untuk mengatasi masalah kenaikan kecepatan. Dengan metode
ini yang memanfaatkan informasi masa depan, dapat menghasilkan respon yang mendekati model referensi. Dengan itu dapat membantu ICE dalam menanggung beban yang diberikan pada saat akselerasi. Berdasarkan hasil pengujian sistem pengaturan dengan metode GPC dapat memperbaiki respon yaitu peningkatan rise time dari 0,624s ke 0,35s, hal ini membuktikan bahwa kontroler GPC cocok untuk meningkatkan akselerasi
viii
ix
TRACTION CONTROL IN PARALLEL HYBRID ELECTRIC VEHICLE BY USING GENERALIZED PREDICTIVE CONTROL
Name : Ilmiyah Elrosa Citra Resmi Advisor I : Ir. Rusdhianto Effendi AK,MT. Advisor II : Eka Iskandar, ST., MT
ABSTRACT
In Hybrid Electric Vehicle, expecially for Parallel Hybrid Electric Vehicle (PHEV), there is a problem, decreasing Internal Combustion Engine(ICE) response when increasing of velocity happen. In the acceleration mode, ICE need a help from electric motor. If the electric motor doesn’t help,and it happen all time, that can decrease ICE’s performance. Hence, traction control is needed for electric motor to help ICE reach acceleration.
In this final project, Generalized Predictive Control is used for solve the increasing of velocity. With that method, using the future information can generate response that closed to reference model. With this method, can help ICE for bearing the load in acceleration mode. The testing result, control system using GPC can incresing rise time from 0,624s to 0,35s. it proves that GPC controler appropriate for increasing acceleration.
x
xi
KATA PENGANTAR
Puji syukur kehadirat Allah SWT yang senantiasa memberikan rahmat dan hidayah-Nya, sehingga penulis dapat menyelesaikan laporan Tugas Akhir ini dengan judul “Traction Control pada Parallel Hybrid
Electric Vehicle dengan Metode Generalized Predictive Control”. Tugas
Akhir ini disusun guna memenuhi persyaratan untuk mencapai Gelar Sarjana Teknik pada Bidang Studi Teknik Sistem Pengaturan, Jurusan Teknik Elektro Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember (ITS) Surabaya.
Pada kesempatan yang penulis juga mengucapkan terima kasih kepada
1. Keluarga saya atas doa dan dukungannya sehingga penulis dapat termotivasi untuk menyelesaikan Tugas Akhir.
2. Bapak Rusdhianto Effendi dan Bapak Eka Iskandar selaku pembimbing Tugas Akhir.
3. Teman-teman Bidang Studi Sistem Pengaturan yang selalu menemani penulis dalam pengerjaan Tugas Akhir dan thanks to
all of my teammates Wid, Gopar, Chacul.
4. Mas Rama dan mas Fahrul yang telah banyak membantu dalam pengerjaan software dan hardware.
5. Serta berbagai pihak yang turut membantu dalam pengerjaan Tugas Akhir ini baik secara langsung maupun tidak langsung. Penulis menyadari bahwa isi buku laporan Tugas Akhir ini masih jauh dari sempurna baik dalam penyusunan, maupun dalam pembahasan dan analisa permasalahan. Oleh karena itu, penulis mengucapkan mohon maaf yang sebesar-besarnya atas segala kekurangan dalam buku ini. Penulis juga berharap masukan dari pembaca agar penulis dapat mengurangi kesalahan pada penulisan berikutnya.
Besar harapan penulis bahwa buku Tugas Akhir ini dapat memberikan informasi dan manfaat bagi pembaca pada umumnya dan mahasiswa Jurusan Teknik Elektro pada khusunya.
Surabaya, Januari 2014 Penulis
xii
xiii
DAFTAR ISI
HALAMAN
Halaman Judul ... i
Pernyataan Keaslian ... iii
Lembar Pengesahan ... v
Abstrak ... vii
Abstract ... ix
Kata Pengantar ... xi
Daftar Isi ... xiii
Daftar Gambar ... xv
Daftar Tabel ... xix
BAB 1 Pendahuluan ... 1 1.1Latar Belakang ... 1 1.2Rumusan Masalah... 1 1.3Tujuan ... 2 1.4Batasan Masalah ... 2 1.5Sistematika Penulisan ... 2 1.6Relevansi ... 3
BAB 2 Tinjauan Pustaka ... 5
2.1Hybrid Electric Vehicle (HEV) ... 5
2.1.1HEV Seri ... 5
2.1.2HEV Paralel ... 6
2.1.3HEV Seri Paralel ... 7
2.2Internal Combustion Engine (ICE) ... 7
2.3Motor Listrik ... 10
2.4Rem Elektromagnetik ... 14
2.5Sistem Penyesuai Kecepatan ... 15
2.6Tachogenerator ... 16 2.7Arduino Uno ... 17 2.8MATLAB2010a ... 18 2.9Permodelan Sistem ... 20 2.9.1 Metode Viteckova ... 20 2.9.2 Metode Latzel ... 21 2.9.3 Identifikasi Strejc ... 21
2.9.4 Root Mean Square Error ... 24
2.10Kontrol Prediktif ... 24
2.11Generalized Predictive Control (GPC) ... 26
xiv
BAB 3 Perancangan Sistem ... 35
3.1Gambaran Umum Sistem ... 35
3.2Perancangan Perangkat Keras ... 36
3.2.1 Perancangan Mekanik ... 37
3.2.2 Perancangan Elektronik ... 43
3.3 Perancangan Perangkat Lunak ... 48
3.3.1 MATLAB2010a ... 48
3.3.2 Software Arduino ... 49
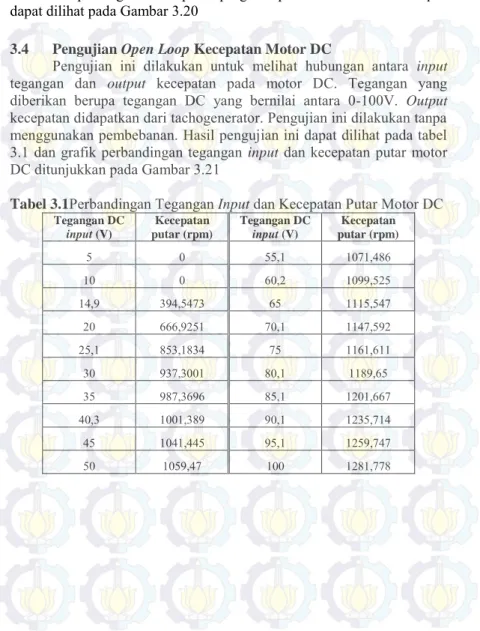
3.4 Pengujian Open Loop Kecepatan Motor DC ... 50
3.5 Pengujian Sensor ... 51
3.5.1 Potensiometer ... 51
3.5.2 Tachogenerator ... 52
3.6 Identifikasi dan Permodelan Sistem ... 53
3.6.1 Metode Pembebanan Plant ... 53
3.6.2 Metode Identifikasi dan Permodelan ... 54
3.6.3 Permodelan ICE ... 55
3.6.4 Permodelan Motor DC ... 60
3.6.5 Pengujian dan Validasi ... 62
3.6.6 Model Referensi... 67
3.7 Desain Sistem Pengaturan Traksi ... 68
3.7.1 Desain Generalized Predicitve Control ... 68
3.7.2 Desain Prediktor ... 70
3.7.3 Desain Observer ... 72
BAB 4 Pengujian dan Analisis ... 77
4.1 Gambaran Umum Pengujian Sistem... 77
4.2 Simulasi Sistem ... 77
4.2.1 Diagram Blok Simulasi Sistem ... 77
4.2.2 Pengujian Respons ... 79
4.3 Implementasi Sistem ... 94
4.3.1 Pengujian Kontroler GPC Satu Langkah Kedepan ... 95
4.3.2 Pengujian Kontroler GPC Tiga Langkah Kedepan ... 95
BAB 5 Penutup ... 97 5.1 Kesimpulan ... 97 5.2 Saran ... 97 DAFTAR PUSTAKA ... 99 LAMPIRAN ... 101 RIWAYAT PENULIS ... 105
xv
DAFTAR GAMBAR
Gambar 2.1 Konfigurasi HEV Seri ... 5
Gambar 2.2 Konfigurasi HEV Paralel ... 6
Gambar 2.3 Konfigurasi HEV Seri-Paralel ... 7
Gambar 2.4 Komponen dalam Piston ... 8
Gambar 2.5 Prinsip Kerja ICE 2 Tak ... 10
Gambar 2.6 Langkah Pembakaran ICE 2 Tak ... 10
Gambar 2.7 Arah Putaran Motor DC ... 11
Gambar 2.8 Rangkaian dan Kurva Karakteristik Motor DC Seri... 12
Gambar 2.9 Rangkaian dan Kurva Karakteristik Motor DC Shunt ... 13
Gambar 2.10 Rangkaian dan Kurva Karakteristik Motor DC Kompon 13 Gambar 2.11 Rem Elektromagnetik ... 15
Gambar 2.12 Konfigurasi Gir Beda Poros ... 16
Gambar 2.13 Konfigurasi Gir Satu Poros ... 16
Gambar 2.14 Instrument Control Toolbox ... 19
Gambar 2.15 Penarikan Garis pada Metode Strejc ... 22
Gambar 2.16 Sinyal yang Dimanipulasi, Referensi, dan Sinyal Kontrol melalui Aksi Kontrol ... 25
Gambar 2.17 Blok Diagram Sistem dan Full Order State Observer ... 34
Gambar 3.1 Bentuk Fisik Simulator HEV ... 35
Gambar 3.2 Diagram Blok Sistem ... 35
Gambar 3.3 Konfigurasi Perangkat Keras Simulator HEV ... 36
Gambar 3.4 Bentuk Fisik Mesin Pemotong Rumput ... 38
Gambar 3.5 Bentuk Fisik Motor DC ... 38
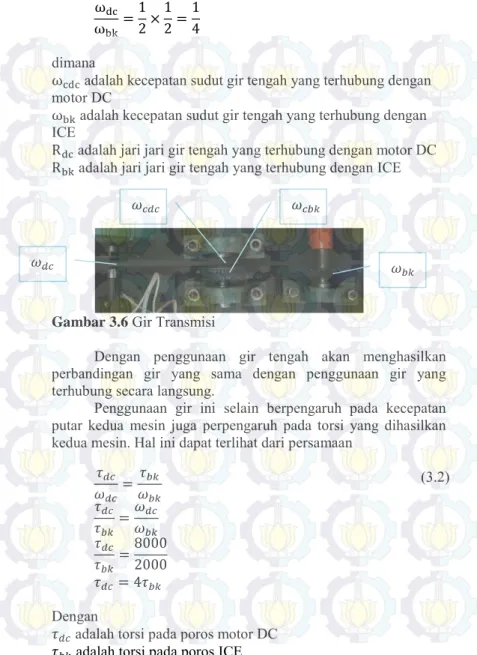
Gambar 3.6 Gir Transmisi ... 40
Gambar 3.7 Bentuk Fisik Potensiometer... 41
Gambar 3.8 Bentuk Fisik Rem Elektromagnetik ... 42
Gambar 3.9 Konstruksi Rem Elektromagnetik ... 42
Gambar 3.10 Bentuk Fisik Tachogenerator ... 43
Gambar 3.11 Bentuk Fisik Rangkaian Driver Motor DC ... 43
Gambar 3.12 Rangkaian Driver Motor DC ... 44
Gambar 3.13 Pin Arduino pada Sistem Pengaturan HEV ... 45
Gambar 3.14 Bentuk Fisik Rangkaian Pembagi Tegangan ... 46
Gambar 3.15 Rangkaian Pembagi Tegangan ... 46
Gambar 3.16 Rangkaian Penyearah Gelombang Penuh ... 47
Gambar 3.17 Bentuk Fisik Rangkaian Penyearah Gelombang Penuh . 47 Gambar 3.18 Blok Simulink MATLAB untuk Pengambilan Data Open Loop... 48
xvi
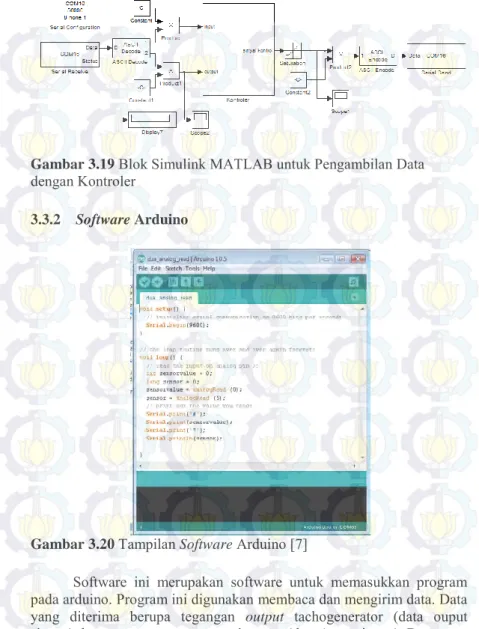
Gambar 3.19 Blok Simulink MATLAB untuk Pengambilan Data dengan
Kontroler ... 49
Gambar 3.20 Tampilan Software Arduino ... 49
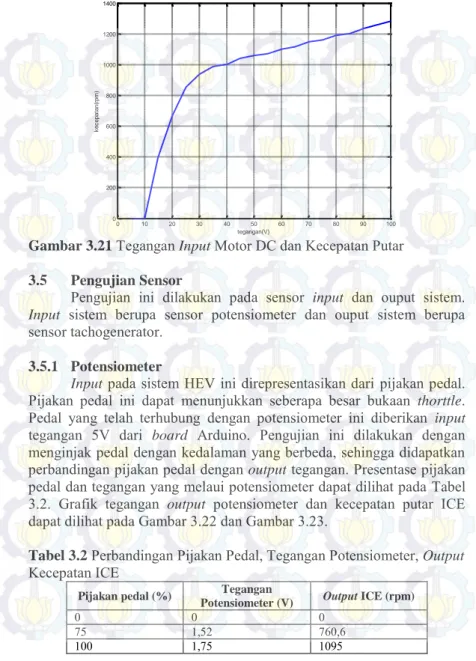
Gambar 3.21 Tegangan Input Motor DC dan Kecepatan Putar ... 51
Gambar 3.22 Pijakan pedal ... 52
Gambar 3.23 Respon Kecepatan Putar ICE ... 52
Gambar 3.24 Tegangan Output Tachogenerator terhadap Kecepatan Putar ... 53
Gambar 3.25 Respons ICE dengan Beban Minimal ... 56
Gambar 3.26 Respons ICE dengan Beban Nominal ... 58
Gambar 3.27 Respons ICE dengan Beban Maksimal ... 59
Gambar 3.28 Respons Kecepatan Motor DC ... 60
Gambar 3.29 Hasil Identifikasi dan Pemodelan ICE Beban Minimal ... 63
Gambar 3.30 Hasil Identifikasi dan Pemodelan ICE Beban Nominal ... 64
Gambar 3.31 Hasil Identifikasi dan Pemodelan ICE Beban Maksimal . 65 Gambar 3.32 Hasil Identifikasi dan Pemodelan Motor DC ... 66
Gambar 4.1 Diagram Blok Simulasi Kontrol dengan GPC ... 77
Gambar 4.2 Diagram Blok Kontroler GPC ... 78
Gambar 4.3 Diagram Blok Prediktor ICE ... 78
Gambar 4.4 Diagram Blok Prediktor Model Referensi ... 78
Gambar 4.5 Diagram Blok Observer ... 79
Gambar 4.6 Respons ICE Terhadap Sinyal Uji Step ... 79
Gambar 4.7 Sinyal Error antara Kecepatan ICE dan Model Referensi . 80 Gambar 4.8 Respons ICE terhadap Sinyal Step dengan Perubahan Amplitudo ... 80
Gambar 4.9 Sinyal Error antara Kecepatan ICE dan Model Referensi dengan Sinyal Uji Step dengan Perubahan Amplitudo ... 81
Gambar 4.10 Motor DC dengan Kontroler GPC Saat Informasi Masa Depan Diketahui ... 82
Gambar 4.11 Motor DC dengan Kontroler GPC Saat Informasi Masa Depan Tidak Diketahui ... 82
Gambar 4.12 Respons HEV dengan Kontroler GPC 3 Prediksi Kedepan dengan Input Sinyal Step ... 83
Gambar 4.13 Sinyal Kontrol GPC 3 Prediksi Kedepan dengan Input Sinyal Step ... 84
Gambar 4.14 Output Motor DC dengan Kontroler GPC 3 Prediksi Kedepan dengan Input Sinyal Step ... 84
Gambar 4.15 Respons HEV dengan Kontroler GPC 3 Prediksi Kedepan dengan Input Sinyal Step dan Informasi Masa Depan. ... 85
xvii
Gambar 4.16 Sinyal Kontrol GPC 3 Prediksi Kedepan dengan Input Sinyal Step dan Informasi Masa Depan. ... 86 Gambar 4.17 Output Motor DC dengan Kontroler GPC 3 Prediksi
Kedepan dengan Input Sinyal Step dan Informasi Masa Depan. ... 86 Gambar 4.18 Respons HEV dengan Kontroler GPC 3 Prediksi Kedepan
dengan Perubahan Amplitudo Input Sinyal Step ... 87 Gambar 4.19 Sinyal Kontrol GPC 3 Prediksi Kedepan dengan
Perubahan Amplitudo Input Sinyal Step ... 88 Gambar 4.20 Output Motor DC dengan Kontroler GPC 3 Prediksi
Kedepan dengan Perubahan Amplitudo Input Sinyal Step ... 88 Gambar 4.21 Respons HEV dengan Kontroler GPC 3 Prediksi Kedepan
dengan Perubahan Amplitudo Input Sinyal Step dan Infomasi Masa Depan ... 89 Gambar 4.22 Sinyal Kontrol GPC 3 Prediksi Kedepan dengan
Perubahan Amplitudo Input Sinyal Step dan Informasi Masa Depan ... 90 Gambar 4.23 Output Motor DC dengan Kontroler GPC 3 Prediksi
Kedepan dengan Perubahan Amplitudo Input Sinyal Step ... 90 Gambar 4.24 Respons HEV dengan Kontroler GPC 1 hingga 5 Prediksi
Kedepan dengan Input Sinyal Step ... 91 Gambar 4.25 Respons HEV dengan Kontroler GPC 1 hingga 5 Prediksi
Kedepan dengan Perubahan Amplitudo Input Sinyal Step ... 92 Gambar 4.26 Respons HEV dengan Kontroler GPC 1 hingga 5 Prediksi
Kedepan dengan Input Sinyal Step dan Infomasi Masa Depan... 93 Gambar 4.27 Respons HEV dengan Kontroler GPC 1 hingga 5 Prediksi
Kedepan dengan Perubahan Amplitudo Input Sinyal Step dan Infomasi Masa Depan ... 94 Gambar 4.28 Respons Hasil Implementasi dengan Kontroler GPC
dengan Prediksi Satu Langkah Kedepan ... 95 Gambar 4.29 Respons Hasil Implementasi dengan Kontroler GPC
xviii
xix
DAFTAR TABEL
Tabel 2.1Tabel Parameter Latzel ... 21 Tabel 2.2 Nilai Konstanta T ... 23 Tabel 2.3 Parameter Identifikasi Metode Strejc ... 23 Tabel 3.1Perbandingan Tegangan Input dan Kecepatan Putar Motor DC
... 50 Tabel 3.2 Perbandingan Pijakan Pedal, Tegangan Potensiometer, Output
Kecepatan ICE ... 51 Tabel 3.3 Perbandingan Nilai Tegangan dan Kecepatan Putar ... 53 Tabel 3.4 Permodelan dengan Beberapa Metode ... 54 Tabel 3.5 Persamaan Model dan Validasi Plant ICE Beban Minimal .. 63 Tabel 3.6 Persamaan Model dan Validasi Plant ICE Beban Nominal .. 64 Tabel 3.7 Persamaan Model dan Validasi Plant ICE Beban Maksimal 65 Tabel 3.8 Persamaan Model dan Validasi Plant Motor DC ... 66 Tabel 3.9 Pemilihan Model Plant ICE ... 67 Tabel 4.1 Nilai Rise Time dan Error Output HEV dengan Prediksi 1
hingga 5 Langkah Kedepan dan Input Sinyal Step ... 91 Tabel 4.2 Nilai Rise Time dan Error Output HEV dengan Prediksi 1
hingga 5 Langkah Kedepan dan Input Sinyal Step dengan Perubahan Amplitudo... 92 Tabel 4.3 Nilai Rise Time dan Error Output HEV dengan Prediksi 1
hingga 5 Langkah Kedepan, Input Sinyal Step dan Informasi Masa Depan... 93 Tabel 4.4 Nilai Rise Time dan Error Output HEV dengan Prediksi 1
hingga 5 Langkah Kedepan, Input Sinyal Step dengan Perubahan Amplitudo dan Informasi Masa Depan ... 94
xx
1
BAB I
PENDAHULUAN
1. BAB I1.1 Latar Belakang
Dalam kehidupan nyata, terdapat berbagai macam masalah yang sampai saat ini belum bisa diselesaikan. Salah satu masalah tersebut adalah masalah transportasi. Semakin meningkatnya jumlah alat transportasi mengakibatkan peningkatan tingkat emisi gas yang diakibatkan oleh asap asap kendaraan bermotor. Hal ini mengakibatkan memburuknya iklim di dunia (global warming). Ditambah lagi dengan penggunaan bahan bakar minyak (BBM) yang tergolong sumber daya alam yang tidak dapat diperbaharui, sehingga jika digunakan secara terus menerus akan terjadi kelangkaan..
Kendaraan listrik muncul untuk menyelesaikan permasalahan tersebut. Keunggulan kendaraan ini yaitu tidak mengeluarkan emisi karbon, tidak menggunakan BBM, dan tidak bising. Kelemahan kendaraan ini yaitu rendahnya kapasitas baterai, sehingga membuat waktu berkendara rendah dan membutuhkan waktu pengisian yang lama. Salah satu solusi untuk menyelesaikan permasalahan diatas adalah dengan menggunakan kendaraan hybrid (Hybrid Electric
Vehicle). Kendaraan hybrid merupakan kendaraan yang bekerja dengan
menggunakan dua jenis penggerak. Pada umumnya penggerak yang digunakan adalah Internal Combustion Engine (ICE) dan motor listrik. Motor listrik didesain untuk membantu motor bakar pada keadaan transien dan membatu ICE beroperasi lebih konstan, sehingga dapat meningkatkan efisiensi penggunaan bakan bakar dan rendah emisi. Alat untuk Implementas Tugas Akhir ini merupakan simulator HEV konfigurasi paralel yang telah dirancang sebelumnya oleh Galih Satrio dan Wahyu Sriwidodo [1][2].
1.2 Rumusan Masalah
Pada Hybrid Electric Vehicle terutama pada HEV konfigurasi paralel, ICE merupakan penggerak utama. Hal ini disebabkan kapasitas
charge baterai tidak terlalu besar, sehingga tidak dapat menggerakkan
motor listrik secara terus menerus. Dalam penggunaannya, kendaraan tidak terlepas dari adanya kenaikan atau penurunan kecepatan. Oleh karena itu dibutahkan pengaturan traksi untuk mengatasi kenaikan kecepatan. Ketika kecepatan dinaikkan ICE akan meningkatkan
2
kinerjanya sehingga untuk menstabilkan kinerja ICE motor listrik aktif untuk membantu motor bakar mencapai kecepatan yang diinginkan.
Metode GPC akan digunakan untuk pengaturan traksi dalam penelitian ini, metode ini digunakan untuk memprediksi adanya error sehingga dapat menghasilkan sinyal kontrol yang sesuai sehingga menghasikan output yang mengikuti model referensi. Selain itu metode ini berguna untuk menjaga kestabilan motor bakar dalam mencapai kecepatan yang diinginkan.
1.3 Tujuan
Dengan digunakannya kontroler GPC pada HEV, diharapkan dapat meningkatkan performansi HEV saat keadaan akselerasi. Dengan bantuan motor listrik, maka dapat menghemat penguunaan bahan bakar pada ICE dan mengurangi emisi gas. Hal ini dapat dicapai karena kontroler GPC memiliki kemampuan utntuk memprediksi nilai output masa depan, sehingga dapat menghasilkan sinyal kontrol yang sesuai.
Implemetasi metode ini diharapkan dapat memberikan kontribusi nyata terhadap dunia industri terutama industri otomotif. Selain itu juga dapat memberikan kontribusi pada bidang pendidikan dan dapat digunakan untuk referensi penelitian lebih lanjut.
1.4 Batasan Masalah
Permasalahan pada tugas akhir ini dibatasi oleh beberapa hal antara lain:
a. ICE dioperasikan secara manual dan tidak diberikan aksi kontrol. b. Motor listrik diberikan tegangan dari jala jala PLN, tidak
menggunakan baterai sehingga tidak ada mekanisme charging dan discharging.
c. Pengaturan traksi simulator HEVdilakukan oleh motor listrik saat keadaan akselerasi.
d. Kecepatan putar ICE merupakan kecepatan yang terukur pada poros motor DC, sehingga kecepatan terukur sebesar 25% kecepatan aktual
1.5 Sistematika Penulisan
Tugas akhir ini disusun dengan sistematika penulisan sebagai berikut:
3
BAB I : PENDAHULUAN
Bab ini berisi tentang latar belakang, rumusan masalah, tujuan, batasan masalah, sistematika penulisan, dan relevansi.
BAB II : TINJAUAN PUSTAKA
Bab ini berisi tentang teori yang menunjang penelitian, berupa teori tentang HEV dan komponennya, serta metode yang digunakan untuk pengaturan HEV.
BAB III : PERANCANGAN SISTEM
Bab ini berisi tentang perancangan perangkat keras, perangkat lunak, dan perancangan kontroler.
BAB IV : IMPLEMENTASI DAN ANALISA
Bab ini berisi tentang hasil simulasi kontroler dan analisanya. Selain itu berisi tentang hasil implementasi kontroler pada Simulator HEV beserta analisa hasil implementasi.
BAB V : KESIMPULAN DAN SARAN
Bab ini berisi tentang kesimpulan hasil penelitian dan saran untuk penelitian selanjutnya.
1.6 Relevansi
Hasil dari tugas akhir ini diharpkan dapat berkontribusi dalam pengembangan penelitian tentang HEV serta diharapkan dapan meningkatkan teknologi otomotif dalam negeri.
4
5
BAB 2
TINJAUAN PUSTAKA
2. BAB II2.1 Hybrid Electric Vehicle (HEV) [3]
HEV merupakan kendaraan yang melibatkan kombinasi dari dua sumber energi yaitu Internal Combustion Engine (ICE) dan motor listrik. Hal ini yang membedakan HEV dengan kendaraan konvensional yang beroperasi dengan ICE atau mesin bakar. Pada umumnya kendarann bekerja dengan bahan bakar fosil (bensin atau diesel), sedangkan HEV menggunakan bahan bakar dan listrik. Energi listrik tersebut dialirkan pada motor listrik. Dalam hal ini motor listrik dirancang untuk menangani variasi energi transien dan membantu mesin untuk beroperasi lebih konstan dengan efiseinsi tinggi dan emisi yang lebih rendah.
Ada beberapa jenis konfigurasi ICE dan motor listrik berdasarkan penghubungnya, yaitu HEV seri, HEV paralel. Dan HEV seri paralel.
2.1.1 HEV Seri
Dalam konfigurasi ini ICE tidak terhubung secara langsung ke rangkaian kereta penggerak, tetapi generator listrik sebagai gantinya. Konfigurasi HEV seri dapat dilihat pada Gambar 2.1. Generator ini terpisah dengan motor listrik kecil yang dipasang pada tiap roda. Dengan ini dapat memungkinkan pengaturan energi yang disalurkan pada tiap roda dan mempermudah dalam pengaturan traksi. Keunggulan dari tipe ini adalah fleksibilitas yang diberikan karena tidak adanya hubungan mekanis antara ICE dan roda.
6
Terdapat kelemahan dan kelebihan dari konfigurasi ini. Kelemahan dari HEV seri adalah membutuhkan pemisahan porsi antara motor dan generator yang dapat dikombinasikan dalam HEV paralel. Efisiensi gabungan dari ICE dan generator juga akan lebih rendah dibandingkan dengan transmisi konvensional. Namun penggunaan HEV konfigurasi seri ini lebih efisien pada kendaraan yang sering berhenti dan mulai kembali, seperti kendaraan pengirim, bus kota, dan lain sebagainya.
2.1.2 HEV Paralel
Sistem ini menghubungkan ICE dan motor listrik langsung ke kereta penggerak. HEV ini dapat diklasifikasikan kembali berdasarkan rasio kontribusi energi. Dalam beberapa kasus mesin bakar adalah komponen yang dominan untuk memasok energi dan menggunakan energi baterai hanya ketika adanya percepatan. Selain itu ada pula kendaraan yang hanya menggunakan motor listrik. Pada umumnya HEV paralel menggabungkan generator listrik dan motor dalam satu unit yang terletak antara ICE dan gir tansmisi untuk menggantikan motor starter konvensional dan alternator.
Baterai yang besar diperlukan untuk memberikan tegangan yang lebih tinggi 12V dari kendaraan normal. Perlengkaan tambahan seperti
power steering dan AC mendapatkan energi dari motor listrik, sehingga
perlengkapan itu dapat terus berfungsi walaupun ICE dihentikan. Dengan ini dapat meningkatkan efisiensi dari sistem dibandingkan dengan dijalankan langsung dengan ICE. Konfigurasi HEV paralel ini dapat dilihat pada Gambar 2.2
7
2.1.3 HEV Seri Paralel
Kendaraan berjenis ini menggabungkan keunggulan dari kedua konfigurasi sebelumnya untuk menciptakan sistem yang efisien. Mode pertama, motor listrik digunakan untuk mengontrol kecepatan mesin sedangkan ICE memberikan sisa energi yang diperlukan untuk meningkatkan akselerasi. Mode kedua, penggunaan motor listrik dapat dikurangi. Masing msing motor digunakan untuk mengatur kecepatan mesin dalam kondisi yang berbeda. Dengan ini efisiensi dapat ditingkatkan dengan mengurangi sirkulasi energi melaui penggunaan gigi tetap. Konfigurasi HEV Seri Paralel dapat dilihat pada Gambar 2.3
Gambar 2.3 Konfigurasi HEV Seri-Paralel 2.2 Internal Combustion Engine (ICE) [4]
ICE sering digunakan dalam alat transportasi pribadi atau masal. Pada dasarnya ada dua jenis ICE yaitu mesin yang menmbutuhkan busi dan mesin yang mengandalkan kompresi fluida. Mesin yang membutuhkan busi mengambil campuran bahan bakar dan udara, mengkompresnya dan memicunya dengan menggunakan busi. Gambar 2.4 menunjukkan komponen dalam piston. Silinder piston pada dasarnya menggunakan mekanisme engkol silinder. Piston bergerak naik turun dengan gerakan berputar dari dua lengan. Lengan itu berputar dengan digerakkan oleh poros engkol. Piston ini terletak pada ruang pembakaran. Katup yang terletak diatas merupakan katup induksi dan pembuangan yang digunakan untuk memasukan campuran udara - bahan bakar dan pembuangan dari ruang residu. Pada mesin spark ignition diperlukan lecutan listrik untuk menyalakan campuran bahan bakar dan udara. Dalam mesin kompresi pengapian campuran menyatu pada suhu
8
dan tekanan yang tinggi. Titik terendah yang dicapai piston disebut tiitik mati bawah dan titik tertinggi yang dapat dicapai piston disebut titik mati atas. Rasio antara titik mati atas dan bawah disebut sebagai rasio kompresi. Rasio kompresi ini sangan penting dalam banyak aspek antara kompresi dan pengapian.
Gambar 2.4 Komponen dalam Piston
Kompresi dari mesin pengapian mengambil udara luar, mengkompresnya ke temperatur dan tekanan tinggi pada saat pembakaran terjadi. Mesin ini dibagi menjadi 2 yaitu ICE 2 tak dan 4 tak. Pada ICE 4 tak, piston melakukan empat stroke yang berbeda untuk tiap perputaran poros engkol 2 kali, sedangkan pada ICE 2 tak, piston melakukan dua stroke yang berbeda dalam satu putaran.
Ketika piston berada di titik mati bawah (TMB) katup intake terbuka, campuran bahan bakar dan air kemudian dikompresi ke titik mati atas (TMA), di mana busi digunakan untuk membakar campuran. Hal ini disebut stroke kompresi. Setelah memukul TMA campuran udara dan bahan bakar mengalami pembakaran. kekuatan dari stroke menyediakan energi yang dibutukan untuk mendorong poros engkol. Setelah piston kembali ke TMB maka katub buang akan membuka.
Stroke exhaust adalah tempat residu untuk meninggalkan ruang
pembakaran. Dengan ini agar residu exhaust dapat meninggalkan ruang pembakaran, tekanan ruang pembakaran harus lebih tinggi dari tekanan atmosfer. Kemudian piston begerak ke TMA, sehingga katub buang menutup. Stroke berikutnya adalah langkah isap. Selama langkah isap
9
katup intake terbuka sehingga memungkinkan campuran udara dan bahan bakar masuk ke ruang bakar dan mengulangi proses yang sama.
ICE 2 tak terbuat dari mesin pengapian kompresi. Output daya mesin ini biasanya tidak lebih dari 100W. Terdapat pula jenis lain dari ICE 2 tak yang memeiliki output daya lebih dari 100W yaitu mesin
spark ignition. Beberapa dari mesin yang berdaya tinggi ini relatif
terhadap berat mereka. Mesin ini digunakan pada sepeda motor, gergaji mesin, mesin pemotong rumput, dan generator kecil.
Prinsip kerja ICE 2 tak ditunjukkan pada Gambar 2.5. Proses pembakaran untuk ICE 2 tak ini melalui langkah langkah sebagai berikut:
a. Pada 60o sebelum memukul TMB, piston membuka exhaust port
(tempat pembuangan gas) dan exhaust meninggalkan silinder menuju tekanan atmosfer.
b. Pada 5-10o, inlet port akan membuka dan muatan yang telah
dikompres pada crankcase akan mengalir ke ruang utama dan bercampur dengan residu exhaust. Beberapa muatan akan meninggalkan exhaust port. Deflektor akan membantu dengan mengalihkan aliran dari inlet port ke exhaust port.
c. Pada sekitar 55o setelah TMB, ketika piston bergerak naik, inlet
port akan menutup. Oleh karena itu terdapat aliran kembali
muatan dari inlet port ke crankcase.
d. Pada 60o setelah TMB, exhaust port akan menutup dan piston
akan menekan muatan melalui gerakan ke atas.
e. Pada 60o sebelum TMA, port crankcase akan terbuka dan muatan
akan mengalir ke dalamnya. Muatan itu mengalir karena tekanan dalam crankcase berada dibawah tekanan ambien.
f. Ketika piston pada 10-40o sebelum TMA, muatan akan
dikompresi hingga bertemperatur tinggi. Kemudian pembakaran akan mengikuti pengapian dari busi. Proses ini dilakukan oleh mesin yang menggunakan campuran udara dan bahan bakar. Daya stroke dimulai ketika piston memukul TMA terus menerus hingga exhaust port terbuka, seperti pada langkah a.
10
Gambar 2.5 Prinsip Kerja ICE 2 Tak
Gambar 2.6 Langkah Pembakaran ICE 2 Tak 2.3 Motor Listrik[5]
Motor merupakan mesin yang mengubah energi listrik menjadi energi garak atau mekanik. Terdapat dua jenis motor listrik, yaitu motor AC dan motor DC. Pada subab ini hanya motor DC yang akan dibahas.
Motor DC merupakan salah satu mesin yang mengubah energi listrik yang berupa tegangan DC ke energi mekanik. Awalnya mesin ini dibuat dan diuji oleh Michael Faraday yang merumuskan konsep elektromagnetik.
Desain faraday dikembangkan dengan cepat, banyak mesin DC yang dibuat pada tahun 1880 ketika DC merupakan bentuk utama dari pembangkit tenaga listrik. Dengan munculnya AC 60Hz sebagai standard energi listrik di United States dan 50Hz di Eropa. Dengan
11
penemuan motor induksi dengan biaya produksi yang rendah, penggunaaan motor DC menjadi berkurang. Dalam beberapa tahun terakhir, penggunaan motor DC meningkat. Hal ini disebabkan karena karakteristik motor dc yang unik contohnya torsi starting yang tinggi untuk aplikasi traksi motor dan hampir sebagian besar peralatan yang mudah dibawa bekerja dengan sumber tegangan DC (seperti baterai).
Jika arus listrik melalui konduktor dan diletakkan pada medan magnet, terdapat gaya yang bekerja diatasnya. Nilai gaya adalah fungsi kerapatan fluks magnetik (B), arus listrik (I), dan vektor arah medan dan arus. Gaya pada konduktor dapat ditulis dengan persamaan
(2.1)
di mana L adalah panjang konduktor. Dari persamaan diatas dapat diketahui bahwa semakin besar arus dalam kawat atau semakin besar medan magnet maka semakin kawat akan bergerak semakin cepat.
Arah perputaran dari motor DC berdasarkan pada kaidah tangan kiri yang berbunyi “Apabila tangan kiri diletakkan di antara kutub utara dan selatan, sehingga garis garis gaya yang memiliki arah sesuai jari telunjuk dan arus di dalam kawat mengalir searah dengan jari tengah, maka kawat itu akan mendapat gaya yang arahnya sesuai dengan arah ibu jari.”. Dari kaidah ini arah putaran motor DC dapat ditunjukkan pada Gambar 2.7
Gambar 2.7 Arah Putaran Motor DC
Pada dasarnya, Motor DC terdiri dari kumparan jangkar yang disebut rotor dan kumparan jangkar yang disebut stator. Stator terletak pada luar bagian dari motor. Biasanya stator terdiri dari dua atau lebih potongan tiang magnet permanen atau elektromagnet. Rotor merupakan bagian dalam motor yang berotasi. Rotor dibentuk dari lilitan jangkar
12
yang terhubung ke rangkaian eksternal melalui komutator. Strator dan rotor terbuat dari bahan feromagnetik dan keduanya dipisahkan oleh gap udara.
Motor DC diklasifikasikan berdasarkan rangkaian listrik dari kumparan jangkar dan kumparan medan. Perbedaan rangkaian ini mengakibatkan mesin beroperasi dengan karakteristik yang berbeda. kumparan medan dapat melalui penguatan sendiri atau penguatan terpisah, yaitu lilitan terhubung dengan tegangan input atau disuplai dari sumber tegangan terpisah. Peguatan sendiri terjadi jika lilitan terhubung langsung dengan terminal sumber tegangan input baik secara seri atau paralel
Motor DC seri. Ketika kumparan medan dan jangkar terhubung secara seri dengan sumber tegangan. Pada motor ini medan magnet dihasilkan oleh arus yang melalui kumparan jangkar, hasilnya medan magnet lemah ketika beban motor ringan (kumparan jangkar mengalirkan sedikit arus). Medan magnet akan kuat saat beban berat (kumparan jangkar mengalirkan arus maksimum). Akibatnya kecepatan motor DC seri ditentukan oleh arus beban. Kecepatan rendah pada beban berat dan sangat cepat saat tanpa beban. Sehingga saat beroperasi tanpa beban, motor akan beroperasi dengan cepat dan akan merusak komponen didalamnya. Torsi pada motor DC tergantung pada perkalian arus jangkar dan medan magnet. Sehingga torsi akan besar pada arus jangkar tinggi dan pada awal pengaktifan. Motor seri dapat beradaptasi dengan beban inersia yang berat dan berguna sebagai penggerak pada bus listrik, kereta, dan aplikasi traksi beban berat. Dibandingkan dengan motor shunt, motor DC seri mempunyai torsi starting tinggi dan regulasi kecepatan rendah. Rangkaian dan kurva karakteristik motor DC seri ditunjukkan pada Gambar 2.8
Gambar 2.8 Rangkaian dan Kurva Karakteristik Motor DC Seri
Motor DC shunt. Ketika kumparan medan dan jangkar dihubungkan secara shunt atau paralel terhadap sumber tenaga. Dengan itu tegangan yang melewati dua kumparan sama tetapi kumparan
13
jangkar mengalirkan arus lebih dari kumparan medan. Torsi dihasilkan dari interaksi arus pada kumparan jangkar dengan medan magnet yang dihasilkan kumparan medan. Jika tegangan dc konstan, tegangan jangkar dan tegangan jangkar konstan. Regulasi kecepatan cukup baik, kecepatan adalah fungsi dari arus jangkar dan tidak selalu konstan. Jangkar berotasi dalam medan magnet, EMF diinduksi. EMF memiliki arah yang bertolak belakang dengan sumber EMF and disebut counter EMF (CEMF), yang mengakibatkan perubahan kecepatan putar. Arus yang melalui kumparan jangkar adalah selisih antara EMF dan CEMF. Ketika beban meningkat, kecepatan motor menurun dan sedikit CEMF diinduksi, yang terus meningkatkan arus jangkar dan meningkatkan torsi untuk kenaikan beban. Rangkaian dan kurva karakteristik motor DC shunt ditunjukkan pada Gambar 2.9.
Gambar 2.9 Rangkaian dan Kurva Karakteristik Motor DC Shunt
Motor DC kompon. Motor dengan menggabungkan karakteristik operasi dari motor seri dan paralel. Kemampuan torsi yang tinggi dari motor DC seri yag mengakibatkan kecepatan yang berlebihan. Kekurangan itu dapat dikurangi dengan penambahan medan shunt, dihubungkan sedemikan hingga membantu medan seri. Motor dapat menjadi mesin kompon komulatif. Rangkaian dan kurva karakteristik motor DC kompon ditunjukkan pada Gambar 2.10.
14
2.4 Rem Elektromagnetik [6]
Ketika fluks magnet melalui konduktor, arus eddy dibangkitkan pada konduktor tersebut. Arus eddy bersirkulasi dalam konduktor menghasilkan medan magnet yang memiliki polaritas yang berlawanan. Interaksi dari dua medan magnet menyebabkan gaya yang menghambat perubahan fluks magnet. Namun karena hambatan dalam dari materal konduktif, arus eddy akan didisipasikan menjadi panas dan gaya akan berkurang. Selama arus eddy didisipasi, energi dipindahkan dari sistem dan mengakibatkan efek peredaman.
Salah satu sifat yang berguna pada peredaman arus eddy adalah memindahkan energi sistem tanpa bersentuhan langsung dengan struktur. ada 2 tipe dasar dari rem arus eddy yaitu rem arus eddy sirkular dan rem arus eddy linier
a. Rem arus eddy sirkular.
Rem elektromagnetik ini sama dengan motor listrik, disk metal non feromagnetik(rotor) dihubungkan pada kumparan putar dan medan magnet antara rotor dan kumparan membentuk hambatan yang digunakan untuk menghasilkan listrik atau panas. Ketika menggunakan elektromagnet, pengaturan aksi pengereman dibuat degan memvariasikan kekuatan dari medan magnet. Gaya pengereman terjadi ketika arus listrik melalui elektromagnet. Pergerakan metal melalui medan magnet menghaslkan arus eddy pada disk. Arus eddy menimbulkan medan magnet yang berlawanan yang kemudian menghambat perputaran disk.
b. Rem arus eddy linier
Rem ini terdiri dari beban magnetik dengan kumparan listrik yang diletakkan sepanjang lintasan beban magnetik ini menjadi magnet alternatif kutub utara dan selatan. Magnet ini tidak menyentuh lintasan, tetapi berjarak cukup kecil dari lintasan. Ketika magnet digerakkan melalui lintasan, akan menghasilkan mendan magnet non stasioner pada ujung lintasan yang menghasilkan tagangan listrik (hukum induksi faraday) dan menyebabkan arus eddy. Dengan gangguan dari medan magnet, medan magnet memberikan gaya yang berlawanan sehingga menciptakan gaya horizontal yang melawan gerak magnet. Rem elektormagnet biasa diletakkan dekat dengan bagian yang bergerak. Rem ini bekerja pada kondisi yang dingin dan memenuhi persyaratan energi pengereman kecepatan tinggi karena tanpa adanya
15
gesekan. Poros baling baling dibedakan dan disesuaikan dengan sliding
universal joint dan dihubungkan ke coupling flange pada rem, rem
disesuaikan dengan sasis kendaraan dan dengan pemasangan anti getar. Letak rem dalam kendaran mencengah tumbukkan langsung dari udara yang disebabkan oleh gerakan kendaraan. Setiap aliran udara dalam sasis memiliki efek yang besar pada lairan udara sekitar ban dan suhu cakram depan dan belakang. Bentuk rem elektromagnetik ditunjukkan pada Gambar 2.11
Gambar 2.11 Rem Elektromagnetik 2.5 Sistem Penyesuai Kecepatan [1][2]
Dalam mengkombinasikan dua mesin penggerak yang memilki
range kerja yang berbeda, maka dibutuhkan suatu sistem untuk
mengubah kecepatan sudut dan torsi. Gir merupakan alat yang digunakan untuk mentransmisikan gaya dan momen. Secara fisik, gir berbentuk lingkaran dengan gerigi pada bagian luarnya.
Ada 2 jenis konfigurasi gir yang biasa digunakan yaitu gir beda poros dan gir satu poros. Bentuk konfigurasi gir beda poros (reduction
gear) ditunjukkan pada Gambar2.12. Pada penggunaannya konfigurasi
gir ini biasa dikombinasikan dengan timing belt karena jika terhubung secara langsung membutuhkan dimensi tempat yang berdekatan. Berikut adalah aturan yang berlaku pada gir yang berbeda poros.
(2.2)
(2.3)
(2.4)
16
dengan V, R, , F, dan adalah kecepatan tangensial gir (m/s), jari jari gir (m), kecepatan sudut (rad/s), gaya tagensial (N), dan torsi (Nm).
Gambar 2.12 Konfigurasi Gir Beda Poros
Konfigurasi gir yang kedua adalah gir satu poros (compound
gear). Gir memiliki kecepatan yang sama pada porosnya dan biasa
digunakan untuk menghubungkan dua gir agar mengurangi dimensi gir dan tetap dapat menjalankan fungsi yang sama dalam mengubah kecepatan atau torsi. Konfigurasi gir satu poros dapat dilihat pada Gambar 2.13,
Gambar 2.13 Konfigurasi Gir Satu Poros 2.6 Tachogenerator
Alat ini berupa generator elektromagekanik yang dapt memproduksi energi listrik dari energi mekanik. Generator akan menghasilkan tegangan yang proporsional dengan kecepatan batang berputar. Dengan desain dan konstruksinya, tachogenerator dapat
17
menghasilkan tegangan untuk range kecepatan tertentu, sehingga alat ini cocok untuk pengukuran kecepatan putar peralatan mekanik.
Tachogenerator juga dapat menunjukkan arah putaran dengan melihat polaritas dari tegangan output. Ketika magnet permanen pada tachogenerator berputar dengan arah yang berkebalikan, polaritas tegangan output akan berpindah.
Jangkar tachogenerator (rotor) ini terhubung dengan mesin penggerak yang kecepatannya akan dideteksi. Kumparan jangkar berputar pada medan magnet permanen, tegangan AC yang diinduksi dari kumparan jangkar. Tegangan ini akan dialirkan pada komutator dengan brush khusus dan pada prosesnya merubah putaran ke tegangan DC.
Tachogenerator DC menghasilkan tegangan dengan ripple yang kecil, frekuensi dan amplitudo tergantung pada kecepatannya, jumlah kutub magnet, jumlah slot jangkar dan jumlah segmen komutator. Kesalahan instalasi tachogenerator pada mesin penggerak dapat meningkatkan ripple.
2.7 Arduino Uno[7]
Arduino Uno adalah board mikrokontroler berbasis Atmega328. Alat ini mempunyai 14 pin input/output digital dan 6 diantaranya dapat digunakan sebagai output PWM, 6 input analog, resonator keramik 19MHz, koneksi USB, soket listrik, ICSP header, dan tombol reset. Dengan kabel USB alat ini mudah dihubungkan ke komputer dan dapat diaktifkan dengan baterai atau adaptor AC ke DC. Spesifikasi Arduino Uno adalah sebagai berikut :
Mikrokontroler : Atmega328
Tegangan operasi : 5V
Tegangan input
(direkomendasikan) : 7-12V
Tegangan input (batasan) : 6-20V
Pin input/output digital :14 (6 diantaranya output PWM)
Pin input analog : 6
Arus DC tiap pin I/O : 40mA
18
14 pin Input dan output Arduino Uno dapat digunakan dengan fungsi pinMode(), digitalWrite(), dan digitalRead(). Tiap pin memiliki tegangan operasi 5V dan dapat menerima arus maksimum 40mA. Beberapa pin memiliki fungsi khusus
a. Serial : 0(RX) dan 1(TX). Digunakan untuk menerima (RX) dan mengirim (TX) data serial TTL. Pin ini terhubung dengan pin pada Atmega8U2 USB ke cip USB ke TTL serial
b. External Interrupts: 2 dan 3.pin ini digunakan sebagai trigger gangguan pada nilai yang rendah, menaikkan dan menurunkan nilai, atau merubah nilai.
c. PWM: 3,5,6,9,10, dan 11. Menyediakan output PWM 8bit dengan fungsi analogWrite().
d. SPI (Serial Peripheral Interface): 10 (Slave Select), 11(Master Out Slave In), 12(Master In Slave Out), 13(Serial Clock). Pin ini
mendukung komunikasi SPI.
e. LED :13, LED ini terhubung dengan pin 13. Ketika pin memiliki nilai yang tinggi LED akan on dan ketika pin memiliki nilai yang rendah, LED akan off
Pada Arduino Uno terdapat 6 input analog, dengan nama A0 hingga A5. Pin tersebut memiliki resolusi 10bits (1024 nilai yang berbeda). Input analog ini berupa tegangan dari ground ke 5V, walaupun begitu terdapat kemungkinan untuk mengubah batas atas dan bawah dengan menggunakan pin AREF dan fungsi analogReference().
2.8 MATLAB2010a[8]
MATLAB2010a merupakan paket program dengan bahasa pemrograman yang tinggi untuk mengembangkan algoritma, visualisasi data, dan komputasi numerik. Program MATLAB ini dapat digunakan untuk menyelesaikan masalah komputasi dengan lebih cepat dibandingkan dengan bahasa pemrograman tradisional, seperti C, C++, dan Fortran. MATLAB digunakan untuk banyak aplikasi seperti signal
and image processing, desain kontrol, pengujian dan pengukuran,
permodelan, dan analisis.
Simulink merupakan bagian dari MATLAB untuk memodelkan, mensimulasikan, dan menganalisa sistem dinamik. Simulink dapat membentuk model dari awal atau memodifikasi model yang sudah ada sesuai dengan apa yang diinginkan. Selain itu simulink juga mendukung sistem linier dan non linier, permodelan waktu kontinyu atau diskrit, atau gabungan. Simulink ini dapat digunakan sebagai media untuk menyelesaikan masalah dalam industri nyata meliputi kedirgantaraan
19
dan pertahanan, otomotif, komunikasi, elektronik dan pemrosesan sinyal,
Salah satu modul dalam simulink yang dapat digunakan untuk komunikasi perangkat keras adalah Instrument Control Toolbox, seperti terlihat pada Gambar 2.14. Modul ini merupakan kunpulan fungsi M-file yang dibangun dilingkungan komputasi teknis MATLAB. Toolbox ini menyediakan kerangka kerja untuk komunikasi instrumen yang mendukung GPIB interface, standar VISA, TCP/IP, dan protokol UDP.
Toolbox ini memperluas fitur dasar serial port yang ada dalam
MATLAB. Selain itu toolbox ini berfugsi untuk komunikasi data antara workspace MATLAB dan peralatan lainnya. Data tersebut dapat berbentuk biner atau text.
Gambar 2.14 Instrument Control Toolbox [8]
Komunikasi serial merupakan protokol dasar tingkat rendah untuk komunikasi antara dua peralatan atau lebih. Pada umumnya satu komputer dengan modem, printer, mikrokontroler, atau peralatan lainnya. Serial port mengirim dan menerima informasi bytes dengan hubungan seri. bytes tersebut dikirimkan menggunakan format biner atau karakter ASCII (American Standard Code for Information
Interchange). Dalam komunikasi serial MATLAB, agar data ASCII
dapat diproses real time, maka digunakan ASCII encode dan decode yang terdapat pada xPC Target Library for RS232. ASCII encode merupakan blok dalam simulink yang digunakan untuk mengubah data
bytes menjadi karakter ASCII. Sedangkan ASCII decode merupakan
blok simulink yang digunakan untuk mengubah karakter ASCII menjadi data bytes yang kemudian dapat dikonversi sesuai kebutuhan.
20
2.9 Permodelan Sistem
Dalam dunia industri segala sesuatu harus dikontrol agar berjalan dengan aman dan efisien. Contohnya untuk mendesain regulator, dibutuhkan model dari proses, terdapat beberapa bentuk model dari sistem, antara lain grafik, tabel, dan model matematika. Diagram bode dari sistem merupakan salah satu contoh bentuk grafik dan contoh model matematika adalah persamaan diferensial dan persamaan beda. Model matematika ini cocok digunakan untuk analisa, prediksi, dan desain sistem, regulator, dan filter.
Model matematika dari sebuah sistem dapat diperoleh melalui dua cara yaitu permodelan fisik dan identifikasi sistem. Permodelan fisik merupakan pendekatan analitik berdasarkan hukum fisika seperti hukum newton dan hukum kesetimbangan. Permodelan ini menjelaskan dinamika dalam sistem. Yang kedua adalah identifikasi sistem. Hal ini dilakukan dengan pendekatan eksperimental. Model ini berdasarkan data dari eksperimen yang kemudian didapatkan nilai parameter sistem. Pada beberapa kasus yang sangat kompleks, sangat sulit untuk menentukan model berdasarkan pemahaman fisik.[9]
2.9.1 Metode Viteckova[10]
Metode Viteckova dapat didekati dengan model orde satu dan orde dua dengan delay. Fungsi alih orde 1 dapat dituliskan sebagai berikut (2.6) Dengan =1,245( )
Fungsi alih orde dua dapat dituliskan sebagai berikut (2.7) Dengan =0,794( )
21
2.9.2 Metode Latzel[10]
Metode Latzel merupakan metode yang berdasarkan pendekatan sistem dengan fungsi alih sebagai berikut
(2.8) di mana
Dengan adalah respons step ketika mencapai 10%, 50% dan 90% dari nilai akhir.
Paramater untuk menentukan permodelan dengan metode Latzel salah satunya adalah yang ditemukan dengan persamaan berikut
(2.9) Kemudian dientukan parameter yang mendekati parameter , orde faktor n, konstanta dapat ditemukan pada Tabel 2.1 Tabel 2.1Tabel Parameter Latzel
n n 0,137 2 1,880 0,596 0,257 0,456 11 0,142 0,094 0,065 0,174 2,5 1,245 0,460 0,216 0,472 12 0,128 0,086 0,060 0,207 3 0,907 0,374 0,188 0,486 13 0,116 0,079 0,056 0,261 4 0,573 0,272 1,150 0,499 14 0,106 0,073 0,053 0,304 5 0,411 0,214 0,125 0,512 15 0,097 0,068 0,050 0,340 6 0,317 0,176 0,108 0,523 16 0,090 0,064 0,047 0,370 7 0,257 0,150 0,095 0,533 17 0,084 0,060 0,045 0,396 8 0,215 0,130 0,085 0,543 18 0,078 0,057 0,042 0,418 9 0,184 0,115 0,077 0,552 19 0,073 0,054 0,040 0,438 10 0,161 0,103 0,070 0,561 20 0,069 0,051 0,039 2.9.3 Identifikasi Strejc [10]
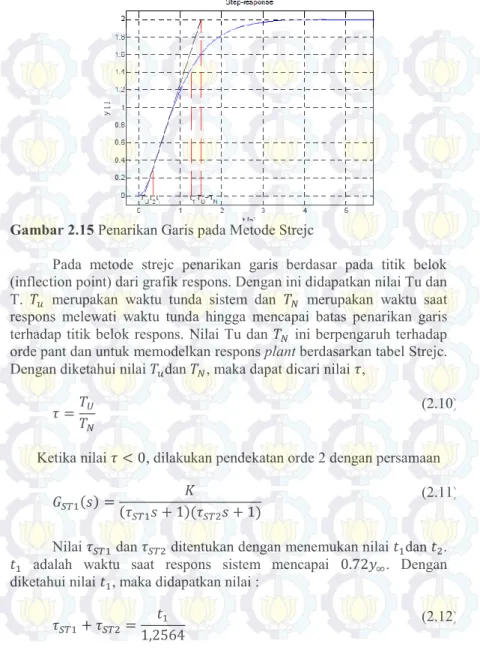
Metode Strejc merupakan metode untuk identifikasi plant dengan cara menarik garis singgung pada titik belok respons step plant dalam domain waktu. Penarikan garis ini ditunjukkan pada Gambar 2.15. Metode ini diterapkan terhadap plant orde tinggi yang memiliki respons
overdamped (ζ > 1) dan respons sistem memiliki time delay sebelum
22
Gambar 2.15 Penarikan Garis pada Metode Strejc
Pada metode strejc penarikan garis berdasar pada titik belok (inflection point) dari grafik respons. Dengan ini didapatkan nilai Tu dan T. merupakan waktu tunda sistem dan merupakan waktu saat respons melewati waktu tunda hingga mencapai batas penarikan garis terhadap titik belok respons. Nilai Tu dan ini berpengaruh terhadap orde pant dan untuk memodelkan respons plant berdasarkan tabel Strejc. Dengan diketahui nilai dan , maka dapat dicari nilai ,
(2.10)
Ketika nilai , dilakukan pendekatan orde 2 dengan persamaan
(2.11) Nilai dan ditentukan dengan menemukan nilai dan . adalah waktu saat respons sistem mencapai . Dengan diketahui nilai , maka didapatkan nilai :
(2.12)
23
(2.13)
Setelah mengetahui nilai , maka nilai y(t2) dapat diketahui dengan
melihat respons sistem. Dengan melihat Tabel 2.2 dapat diketahui nilai T. Setelah mendapatkan nilai T, maka dapat diketahui nilai
(2.14) Untuk sistem didekati dengan orde ke n dengan persamaan
(2.15)
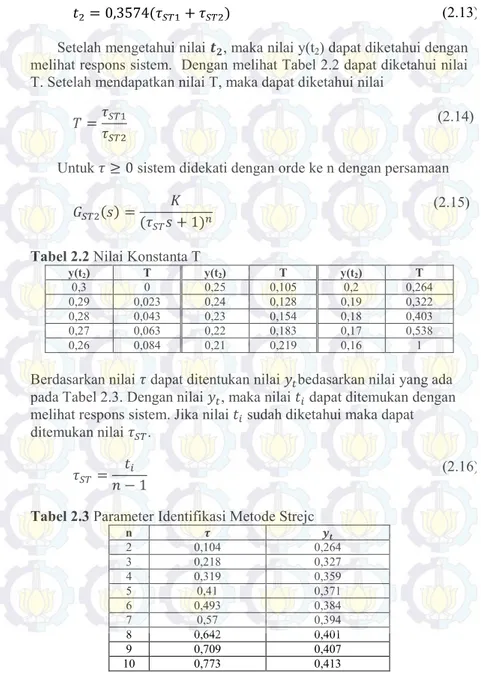
Tabel 2.2 Nilai Konstanta T
y(t2) T y(t2) T y(t2) T
0,3 0 0,25 0,105 0,2 0,264
0,29 0,023 0,24 0,128 0,19 0,322
0,28 0,043 0,23 0,154 0,18 0,403
0,27 0,063 0,22 0,183 0,17 0,538
0,26 0,084 0,21 0,219 0,16 1
Berdasarkan nilai dapat ditentukan nilai bedasarkan nilai yang ada pada Tabel 2.3. Dengan nilai , maka nilai dapat ditemukan dengan melihat respons sistem. Jika nilai sudah diketahui maka dapat ditemukan nilai .
(2.16)
Tabel 2.3 Parameter Identifikasi Metode Strejc
n 2 0,104 0,264 3 0,218 0,327 4 0,319 0,359 5 0,41 0,371 6 0,493 0,384 7 0,57 0,394 8 0,642 0,401 9 0,709 0,407 10 0,773 0,413
24
2.9.4 Root Mean Square Error
Persamaan permodelan digunakan pada banyak bidang ilmu, di mana variabelnya harus diukur dengan ada tidaknya error. Tujuannya adalah agar nilai pada permodelan mendekati nilai real sistem.
Untuk melakukan validasi model dapat digunakan beberapa tolok ukur. Salah satunya adalah RMSE. Dalam penggunaanya, harus ditentukan terlebih dahulu jumlah data dan interval toleransi RMSE. Jika nilai RMSE kecil, menunjukkan bahwa nilai parameter sesuai dengan apa yang diinginkan sebelumnya
Dengan e adalah error antara nilai estimasi dan nilai sebenarnya dan n adalah jumlah data.
(2.17)
2.10 Kontrol Prediktif [11]
Kontrol prediktif berdasarkan model merupakan metode baru pada teknik pengaturan. Pada dasarnya metode ini memperhitungkan dalam optimasi variabel, tidak pada saat ini tapi juga nilai dimasa mendatang. Tujuan yang ingin dicapai yaitu memilih variabel dan mensimulasikan tujuan proses. Jika sinyal kontrol tidak menghasilkan respons yang memuaskan, maka urutan variabel yang dimanipulaasi akan mengubah aksi kontrol hingga mencapai hasil yang sesuai. Terdapat perbedaan yang mendasar antara kontrol prediktif dan kontrol konvensional. Kontroller konvensional hanya mengamati variabel proses pada saat ini dan melihat pada masa lalu. Sedangkan kontroler prediktif dapat mengamati variabel proses saat ini dan masa depan serta juga melihat variabel di masa lampau.
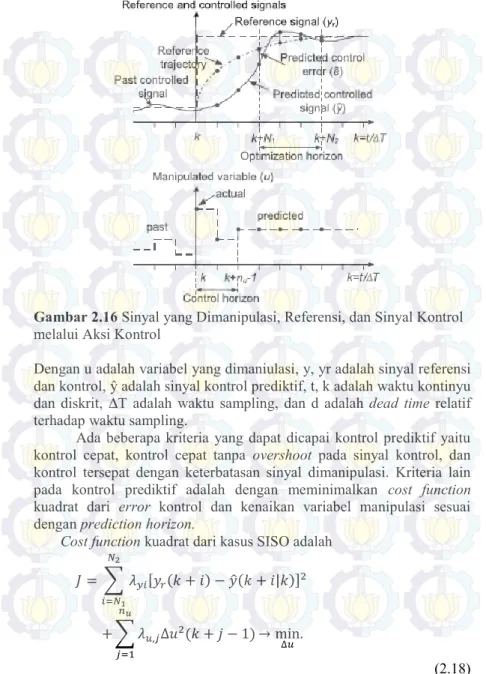
Kontrol prediktif dapat menjalankan beberapa tugas. Pertama kontrol prediktif dapat meminimalkan kesalahan kontrol beberapa langkah kedepan dari saat ini (antara k+N1 dan k+N2). Kedua yaitu menghilangkan nilai kontrol beberapa langkah kedepan (nu-1) dari saat ini. Dan ketiga yaitu memperhitungkan keterbatasan dalam kontrol dan variabel dalam perhitungan. Gambar 2.16 menunjukkan nilai yang dimanipulasi, referensi, dan sinyal kontrol dalam pengaturan.
25
Gambar 2.16 Sinyal yang Dimanipulasi, Referensi, dan Sinyal Kontrol
melalui Aksi Kontrol
Dengan u adalah variabel yang dimaniulasi, y, yr adalah sinyal referensi dan kontrol, ŷ adalah sinyal kontrol prediktif, t, k adalah waktu kontinyu dan diskrit, ΔT adalah waktu sampling, dan d adalah dead time relatif terhadap waktu sampling.
Ada beberapa kriteria yang dapat dicapai kontrol prediktif yaitu kontrol cepat, kontrol cepat tanpa overshoot pada sinyal kontrol, dan kontrol tersepat dengan keterbatasan sinyal dimanipulasi. Kriteria lain pada kontrol prediktif adalah dengan meminimalkan cost function kuadrat dari error kontrol dan kenaikan variabel manipulasi sesuai dengan prediction horizon.
Cost function kuadrat dari kasus SISO adalah
26
dengan merupakan sinyal referensi i langkah kedepan dari waktu saat ini, merupakan sinyal output prediksi (dan terkontrol) i langkah kedepan, dan merupakan kenaikan
output terkontrol i langkah kedepan. Di mana menunjukkan
sinyal akan datang yang diprediksi pada basis informasi yang tersedia hingga waktu tertentu.
Parameter yang akan ditala pada algoritma kontrol adalah a. yang merupakan titik pertama dari prediction horizon
berdasarkan waktu saat ini
b. yang merupakan titik terakhir dari prediction horizon berdasarkan waktu saat ini
c. yang merupakan panjang control horizon (jumlah perubahan yang dikehendaki berturut turut dalam sinyal kontrol)
d. yang merupakan faktor pembebanan dari error kontrol, biasanya diasumsikan bernilai 1 ( = 1 pada kasus SISO).
e. yang merupakan faktor pembebanan dari kenaikan kontrol, biasanya diasumsikan bernilai sama (dan didefinisikan dengan ).
Variabel manipulasi dipengaruhi oleh sinyal kontrol hanya setelah dead time, nilai pertama dan terakhir dari error kontrol horizon disebut
dan . Dengan nilai dan . Dengan dinotasikan kembali menjadi
(2.19)
Cost function mengandung dua bagian yaitu cost untuk
mengontrol error selama horizon error kontrol biasa disebut optimasi atau prediction horizon dan cost untuk menghilangkan kenaikan sinyal kontrol selama horizon variabel manipulasi yang disebut control
horizon.
2.11 Generalized Predictive Control (GPC) [11][12]
GPC yang telah diperkenalkan oleh Clarke et al [12] telah banyak digunakan pada proses dalam industri. Hal ini disebabkan kerena
27
kemampuan pengaturan yang stabil untuk sistem dengan parameter,
dead time, dan orde model yang berubah ubah.
Ketika memperhatikan titik operasi, plant non linier umumnya menggunakan model linier pada daerah tertentu
(2.20)
dengan u(t) input kontrol, y(t) variabel yang terukur atau output, dan x(t) gangguan. Di mana A dan B adalah polinomial
Jika plant tidak mempunyai dead time maka polinomial B bernilai nol. x(t) dianggap rata rata bergerak dengan
(2.21)
di mana
Pada persamaan ini, adalah rangkaian nilai acak berkorelasi. Dengan menggabungkan Persamaan 2.20 dan 2.21 maka akan diperoleh model CARMA (Controlled Auto-Regresive Moving Average),
(2.22) Walaupun sebagian besar teori self tuning berdasarkan pada model ini. Teori ini tidak tepat untuk banyak aplikasi industri yang gangguanya tidak seimbang. Pada prakteknya terdapat dua jenis gangguan yang sering ditemui yaitu nilai acak pada waktu yang acak (contohnya perubahan kualitas material) dan brownian motion (ditemukan pada
plant yang mengandalkan keseimbangan energi). Pada kedua kasus ini
model yang sesuai yaitu
28
di mana adalah operator differensial . Jika digabung dengan Persamaan 2.10 akan menghasilkan model CARIMA (Controlled
Auto-Regresive Integrated Moving Average).
(2.24) Sinyal gangguan berupa sinyal deterministik atau stokastik. Pada perkembangan GPC, diasumsikan berupa sinyal stokastik.
Dengan model linier, yang membatasi kriteria kontrol optimal kuadrat diajukan dalam kenaikan input output plant. Fungsi harga yang diminimumkan adalah (2.25)
di mana adalah costing horizon minimal, adalah costing horizon maksimal, adalah urutan kontrol pembebanan.
Fungsi harga diatas dikondisikan pada data pada waktu t dengan asumsi sinyal kontrol diterapkan dalam loop terbuka. Kontrol pertama diterapkan dan diminimalisasi hingga sampel berikutnya. Hukum kontrol yang dihasilkan dikenal sebagai open loop feedback optimal
control dapat dilihat bahwa fungsi harga dipengaruhi oleh seluruh input
masa depan yang mempengaruhi output.
Sinyal output prediksi dituliskan sebagai penjumlahan dari free response dan force response. Persamaan force
response adalah sebagai berikut :
29 (2.26) dengan
adalah fungsi alih pulsa dari proses tanpa dead time fisik dan adalah fungsi alih pulsa dari proses yang diperpanjang dengan integrator tanpa dead time fisik.
Free Response merupakan respons hasil pengaruh dari input lampau
pada output yang akan datang dengan asumsi aksi kontrol dari waktu saat ini (2.27) di mana ,
Vektor dari output prediksi adalah penjumlahan dari respons prediksi paksa dan bebas
(2.28)
30 (2.29) atau di mana ,
Variabel manipulasi untuk saat ini dan akan datang disebut didesain dengan waktu diskrit, dan bisa ditulis . Untuk lebih mudahnya penulisan hanya ditulis .
H merupakan koefisien respons unit step
Respons step didefinisikan sebagai waktu diskrit positif, elemen matrix segitiga atas H bernilai nol. Cost function kuadrat dapat ditulis
(2.30) Mensubstitusikan vektor dengan penjumlahan hasil forced response dan free response
31
Minimalisasi tanpa batasan dari cost function berdasarkan persamaan kenaikan input menyebabkan
(2.32) Dengan hasil (2.33)
matriks pembebanan berbentuk simetris dan umumnya diagonal, walaupun error pengaturan dan kenaikan kontrol berbentuk fungsi
square dari waktu dan bukan hasil perkalian cross ke nilai antara waktu
yang berbeda.
(2.34) Sebagai matriks diagonal, nilai matriks transpose sama dengan mariks semula, dan , persamaan sinyal kontrol menjadi
(2.35)
Biasanya nilai konstanta diagonal matriks pembebanan bernilai sama = dan = (di mana I adalah matriks identitas) dengan ukuran yang sama. Nilai , dengan
(2.36)
Aksi kontrol dipengaruhi hubungan antara , sehingga ketika salah satu faktor pembebanan diatur bernilai 1, contohnya maka
32
diasumsikan dengan kontrol single input single output (SISO), jika tidak ditetapkan sebelumnya.
Berdasarkan strategi receding horizon hanya kenaikan input pertama digunakan dan dihitung dan diulang ke langkah kontrol selanjutnya,
(2.38) di mana vektor memilliki nilai nol.
2.12 State Observer[13]
Pada sistem pengaturan dengan pendekatan pole placement dilakukan ketika semua variabel dapat terbaca sebagai umpan balik. Pada kenyataannya, tidak semua state variabel dapat terbaca, sehingga dibutuhkan estimasi dari state variabel yang tidak terukur yang disebut
observer. Terdapat bebrapa cara menemukan observer antara lain full order state observer, reduced order state observer, dan minimum order state observer.
Pada Full order state observer orde state observer sama dengan orde plant. Jika persamaan plant adalah sebagai berikut :
(2.39)
Model matematika observer didefinisikan sebagai berikut :
(2.40)
Dengan menggunakan rumus Ackermann untuk pole placement untuk sistem diatas, ditemukan matriks K
33
Dalam mendesain full order state observer, harus menyelesaikan dual
problem, yang dapat diselesaikan dengan pole placement untuk dual
sistem
(2.42)
Berdasarkan rumus Ackermann untuk pole placement diubah menjadi
(2.43)
Sehingga matriks gain diketahui dari nilai , di mana didapat dari
Persamaan 2.43. sehingga (2.44)
di mana adalah karakteristik polinomial yang diinginkan dari state
observer adalah
(2.45) dengan adalah eigenvalue yang diinginkan
Blok diagram sistem dan full order state observer ditunjukkan pada Gambar 2.17
34
ʃ
B +
-Full order state observer
C A Ke + -ʃ B + - C A + -u x
35
BAB 3
PERANCANGAN SISTEM
3. BAB III3.1 Gambaran Umum Sistem [1][2]
Simulator HEV menggunakan penggerak yang terdiri dari ICE dan motor DC. Bentuk fisik simulator HEV ditunjukkan pada Gambar 3.1. ICE digunakan sebagai penggerak utama dan motor DC digunakan untuk membantu ICE dalam meningkatkan torsi kendaraan. Selain itu digunakan rem elektromagnetik untuk memberikan efek pembebanan. Pembebanan ini digunakan untuk menguji pengaruh motor DC dalam membantu motor bakar meningkatkan akselerasi. Diagram blok sistem ditunjukkan pada Gambar 3.2.
Gambar 3.1 Bentuk Fisik Simulator HEV
Driver aktuator Kontroler GPC
Input (pedal) Output
HEV Model referensi + + + -ICE Motor DC tachogenerator Rem elektromagnetik Input (autotrafo) HEV observer Output ICE Prediktor model referensi Prediktor ICE Output Motor DC
36
Dalam sistem ini, motor DC merupakan komponen yang dikontrol agar mencapai output yang diinginkan. Hal ini dilakukan dengan membandingkan nilai model referensi dan nilai output tachogenerator. Hasil dari perbandingan tersebut berupa sinyal error yang kemudian akan diolah kontroler GPC. Kontroler ini akan mengeluarkan sinyal kontrol yang kemudian dikirimkan ke driver aktuator untuk menggerakkan motor DC. Dengan ini output yang dihasilkan diharapkan mempunyai nilai yang menyerupai model referensi.
3.2 Perancangan Perangkat Keras
Pada tahap perancangan ini, terdapat 2 jenis peracangan yang dilakukan, yaitu perancangan mekanik dan elektrik. Perancangan mekanik merupakan perancangan untuk plant dan sensor untuk input dan output plant. Plant berupa ICE, motor DC, dan rem elektromagnetik. Sensor input berupa potensiometer dan sensor output berupa tachogenerator. Perancangan elektronik merupakan perancangan untuk kontroler, aktuator, dan rangkaian pendukung lain. Kontroler akan diprogram pada Arduino. Arduino juga akan menerima tegangan dari sensor input dan output. Aktuator yang digunakan berupa board driver yang terdiri dari beberapa komponen elektronik. Rangkaian pendukung berupa rangkaian penyearah gelombang penuh dan rangkaian pembagi tegangan. Konfigurasi perangkat keras pada simulator HEV dapat dilihat pada Gambar 3.3
Motor DC ICE Gear 4:1 Beban tachogenerator Rem Elektromagnetik
Arduino R3 Driver Motor Power Supply
Power Supply
37
3.2.1 Perancangan Mekanik
Pada simulator HEV ini terdapat beberapa peralatan yang digunakan, antara lain ICE dan motor DC sebagai tenaga penggerak. Untuk menggabungkan kedua mesin ini digunakan gir transmisi. Alat ini digunakan karena perbedaan range kerja dari kedua mesin. Selain itu terdapat rem elektromagnetik yang digunakan untuk memberikan efek pembebanan. Rem elektromagnetik diberikan sumber tegangan yang dihasilkan autotrafo yang telah melalui penyearah gelombang penuh.
Input ICE berupa bukaan throttle yang direpresentasikan dengan
potensiometer. Output kedua mesin diukur oleh tachogenerator yang tercouple dengan motor DC. Tachogenerator memberikan masukan ke arduino dan arduino melakukan aksi kontrol yang kemudian diaktuasi oleh driver ke motor DC.
a. Internal Combustion Engine (ICE)
ICE yang dipilih merupakan jenis mesin pemotong rumput. Alat ini dipilih karena memliliki karakteristik yang menyerupai ICE pada kendaraan 2 tak. Bentuk fisik mesin pemotong rumput yang digunakan dapat dilihat pada Gambar 3.4 Spesifikasi mesin pemotong rumput adalah sebagai berikut :
Tipe : 2 tak
Bahan bakar : Bensin dan oli samping
Perbandingan bensin : oli : 25 :1
Kapasitas silinder : 33,8 cc
Pemasukan bahan bakar : Karburator
Starter : Recoil starter
Sistem pengapian : Electronic ignition
Sistem kopling : Kering, sentrifugal
Kecepatan putar maks. : 8000 rpm
38
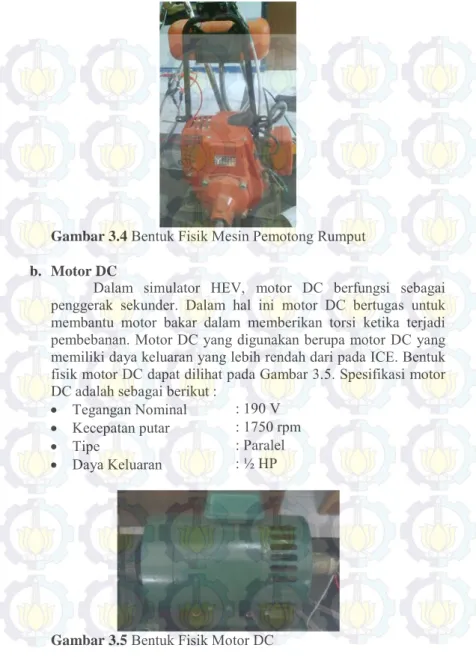
Gambar 3.4 Bentuk Fisik Mesin Pemotong Rumput b. Motor DC
Dalam simulator HEV, motor DC berfungsi sebagai penggerak sekunder. Dalam hal ini motor DC bertugas untuk membantu motor bakar dalam memberikan torsi ketika terjadi pembebanan. Motor DC yang digunakan berupa motor DC yang memiliki daya keluaran yang lebih rendah dari pada ICE. Bentuk fisik motor DC dapat dilihat pada Gambar 3.5. Spesifikasi motor DC adalah sebagai berikut :
Tegangan Nominal : 190 V
Kecepatan putar : 1750 rpm
Tipe : Paralel
Daya Keluaran : ½ HP
![Gambar 2.6 Langkah Pembakaran ICE 2 Tak 2.3 Motor Listrik[5]](https://thumb-ap.123doks.com/thumbv2/123dok/4135779.3068919/28.629.74.558.110.637/gambar-langkah-pembakaran-ice-tak-motor-listrik.webp)