Vol. 12 No. 2 Desember 2017
Majalah Ilmiah Populer
ISSN 1907-6169
Aplikasi Serat Optik pada Pesawat Udara
Inertial Measurement Unit (IMU) pada Sistem Pengendali Satelit
AKTUALITA
Memantau Suhu Permukaan L:aut dengan Sensor Advanced
Microwave Scanning Radiometer-2 (AMSR-2)
Perangkat Lunak Multi-Body Simulation (MBS) untuk Simulasi
Landing Gear Drop Test (LGDT) pada Pesawat Terbang dan UAV
SOSIALITA
Masalah Penguaasaan Teknologi Antariksa di Luar MTCR
Indikasi Perubahan Iklim dari Peristiwa Badai Debu dan Pasir
Peningkatan Kompetensi Penerbangan Melalui CPL-IR Training
Empat Langkah Kamera Menuju Antariksa
Pedoman Bagi Penulis Media Dirgantara
Media Dirgantara adalah majalah ilmiah populer yang ditulis dalam bahasa Indonesia untuk memasyarakatkan
perkembangan iptek dirgantara secara nasional. Sifat populer berarti istilah teknis dijelaskan secara populer dengan
bahasa sederhana, tidak menggunakan rumus-rumus dan tidak perlu daftar rujukan, kecuali menyebutkan sumber
yang bersifat umum seperti lazimnya koran/majalah populer. Gambar dan ilustrasi yang lebih menjelaskan isi tulisan
sangat diharapkan.
Media Dirgantara mengundang para penulis untuk mengirimkan naskah berupa hasil penelitian, kajian,
pengembangan, pemikiran, ulasan atau berita kedirgantaraan yang belum dipublikasikan atau dikirim ke media
publikasi manapun. Naskah yang dikirim akan dievaluasi Dewan Penyunting dari segi keaslian (orisinalitas),
kesahihan (validitas) ilmiah dan kejelasan pemaparan. Naskah yang tidak dimuat akan dikembalikan kepada penulis
dengan alasan penolakannya.
Naskah dikirimkan dalam format MS. Word, ke Sekretariat Redaksi Media Dirgantara, Jl. Pemuda Persil No. 1
Rawamangun, Jakarta 13220 atau melalui e-mail ke [email protected]; m.dirgantara @hotmail.com.
SUSUNAN REDAKSI MEDIA DIRGANTARA
Keputusan Kepala LAPAN Nomor 53 Tahun 2017 Tanggal 13 Maret 2017Penanggung Jawab:
Ir. Christianus R. Dewanto, M.Eng
Redaktur:
Ir. Jasyanto, MM.
Penyunting Penyelia:
Moedji Soedjarwo, ST.
Penyunting Pelaksana:
Dr. Arif Nur Hakim; Nanin Anggraini, S.Si, M.Si;
Drs. Gunawan Admiranto; Indah Susanti, ST;
Suhata, S.Si, MM; Dana Herdiana, S.T.;
Sekretariat Redaksi:
Mega Mardita, S.Sos.; M.Si, Murtani November,
ST,MM;
Disain Grafis: M. Luthfi.
Sampul Depan
Citra MODIS Terra tanggal 1 September 2015 yang menunjukkan putaran debu di Timur Tengah
2
7
10
16
19
22
25
29
Alamat Penerbit :
BIRO KERJASAMA, HUMAS DAN UMUM
Jl. Pemuda Persil No. 1 Rawamangun Jakarta Timur 13220
Telepon: (021) 4892802 (Hunting) Fax: (021) 47882726
e-mail: [email protected], [email protected]
situs:http//www.lapan.go.id
http//jurnal.lapan.go.id
Kemajuan sains dan teknologi ruang angkasa suatu bangsa tidak terlepas dari pengaruh politik
negara tersebut dalam kaitan hubungan antar bangsa. Oleh sebab itu, edisi Media Dirgantara kali
ini diawali dengan artikel tentang Missile Technology Control Regime yang membahas
kesepakatan antar bangsa dalam mengendalikan rudal sehingga hanya bisa dipakai untuk
pemakaian demi tujuan-tujuan damai. Terkait dengan sains antariksa, artikel tentang badai debu
dan kaitannya dengan perubahan iklim bisa memberikan wawasan baru tentang perubahan
iklim itu sendiri.
Selain itu, edisi ini memberi titik berat kepada masalah teknologi, seperti tinjauan tentang
penerapan serat optik pada pesawat udara, tinjauan perangkat lunak untuk simulasi peralatan
pendarat pada pesawat terbang dan UAV, serta artikel-artikel yang terkait dengan sistem kendali
dan pengamatan menggunakan satelit penginderaan jauh.
Harapan kami, edisi Media Dirgantara ini bisa memberikan sedikit tambahan informasi tentang
sains dan teknologi antariksa dan memberikan wawasan baru tentang bidang-bidang tersebut
di atas.
Selamat membaca
Redaksi Media Dirgantara
Alamat Penerbit :
BIRO KERJASAMA, HUMAS DAN UMUM
Jl. Pemuda Persil No. 1 Rawamangun Jakarta Timur 13220
Telepon: (021) 4892802 (Hunting) Fax: (021) 47882726
e-mail: [email protected], [email protected]
situs:http//www.lapan.go.id
http//jurnal.lapan.go.id
SALAM REDAKSI
Kemajuan sains dan teknologi ruang angkasa suatu bangsa tidak terlepas dari pengaruh politik
negara tersebut dalam kaitan hubungan antar bangsa. Oleh sebab itu, edisi Media Dirgantara kali
ini diawali dengan artikel tentang Missile Technology Control Regime yang membahas
kesepakatan antar bangsa dalam mengendalikan rudal sehingga hanya bisa dipakai untuk
pemakaian demi tujuan-tujuan damai. Terkait dengan sains antariksa, artikel tentang badai debu
dan kaitannya dengan perubahan iklim bisa memberikan wawasan baru tentang perubahan
iklim itu sendiri.
Selain itu, edisi ini memberi titik berat kepada masalah teknologi, seperti tinjauan tentang
penerapan serat optik pada pesawat udara, tinjauan perangkat lunak untuk simulasi peralatan
pendarat pada pesawat terbang dan UAV, serta artikel-artikel yang terkait dengan sistem kendali
dan pengamatan menggunakan satelit penginderaan jauh.
Harapan kami, edisi Media Dirgantara ini bisa memberikan sedikit tambahan informasi tentang
sains dan teknologi antariksa dan memberikan wawasan baru tentang bidang-bidang tersebut
di atas.
Selamat membaca
Redaksi Media Dirgantara
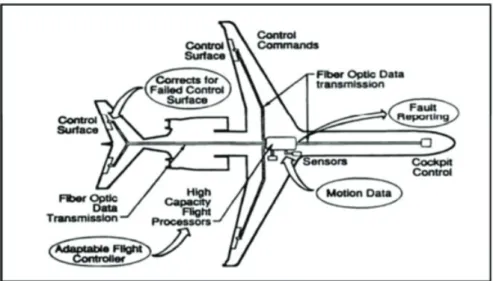
S
erat optik adalah saluran transmisi atau sejenis kabel yang terbuat dari kaca atau plastik yang sangat halus dan lebih kecil dari sehelai rambut, dan dapat digunakan untuk mentransmisikan sinyal cahaya dari suatu tempat ke tempat lain. Sumber cahaya yang digunakan biasanya adalah laserdan Light Emiting Diode (LED). Serat optik pertama kali ditemukan tahun 1930, dan mengalami perkembangan di amerika, eropa, bahkan jepang secara terusAPLIKASI SERAT OPTIK
PADA PESAWAT UDARA
menerus hingga saat ini. Perkembangan terjadi secara besar dibidang komunikasi, namun banyak aplikasinya berkembang seperti pada bidang kesehatan, industri rumah tangga, manufaktur dan penerbangan.Aplikasi serat optik di industri penerbangan dan pertahanan keamanan dirgantara banyak terdapat pada sistem Aviation Electronic (Avionic) yang terdiri atas sistem kontrol
Fly-By-Light (FBL) dan sensor. Dewi Anggraeni - Pusat Teknologi Penerbangan
Vol. 12 No. 2 Desember 2017 3 Komponen opto-elektronik ini memiliki
keunggulan pada data yang dibawa besar, kerugian sinyal yang kecil, keamanan yang besar dari bahaya percikan api dan bebas dari pengaruh gelombang elektromagnetik, serta diameter yang lebih kecil sehingga berat serat optik lebih ringan dari pada kabel listrik biasa. Sehingga teknologi serat optik merupakan resolusi untuk sistem avionik dan solusi ideal dalam memenuhi kebutuhan pesawat udara dimasa depan.
Karena keunggulan serat optik tersebut, tentara US segera mengembangkan fiber optik untuk komunikasi dan sistem taktis . Pada awal tahun 1970, angkatan laut memasang sistem telepon pada kapal USS Little Rock. Pada tahun 1976, angkatan udara Amerika mengikuti perkembangan serat optik ini dengan membuat program Airborne Light Optical
Fiber Technology (ALOFT). Dipertengahan
tahun 1980, perusahaan General Cable bekerja sama dengan perusahaan Boeing untuk mengembangkan salah satu dari kabel serat optik untuk sistem avionic yang di pasang pada pesawat AV-8B Harrier. Sistem Avionic
Avionic berasal dari kata aviation
electronic, sistem avionic adalah sistem
elektronik yang ada pada pesawat, satelit dan pesawat luar angkasa. Sistem ini
memuat bermacam – macam sistem managemen dan layar komunikasi dan navigasi, serta ratusan sistem yang ada pada pesawat untuk menampilkan beberapa fungsi tertentu.
Secara khusus, aplikasi transmisi serat optik pada pesawat udara, baik sipil maupun militer memerlukan bandwith yang tinggi pada on-board VHF dan UHF
radio frequency (RF) avionic, sinyal radar
menggunakan komponen Commercial
off-the-shelf (COTS).
Secara umum sistem avionic merupakan wiring antara hubungan antena, audio dan komunikasi data yang terdiri dari kabel berbahan tembaga, dan memiliki diameter yang berbeda, hal tersebut dikarenakan sistem komunikasi pesawat yang berbeda–beda. Wiringnya terdiri dari beberapa kumpulan kabel listrik dalam ikatan yang besar. Sektor avionic memerlukan sejumlah besar informasi atau data yang perlu ditransmisikan, serta membutuhkan kecepatan yang sangat tinggi. Sistem berdasarkan kabel listrik ini tidak dapat memenuhi hal tersebut. Ada dua kecenderungan mengenai transmisi data yaitu kecepatan transmisi dan kebutuhan mengurangi berat kabel. Teknologi serat optik dapat memenuhi 2 hal tersebut di atas.
Fly-By-Light (FBL)
Teknologi Fly-By-Wire (FBW)
membawa revolusi pada sistem kontrol terbang pesawat udara. Sedangkan teknologi serat optik merupakan generasi mendatang dalam sistem kontrol terbang. Pertama kali di aplikasikan pada kapal, serat optik telah menambah dimensi baru pada sistem kontrol pesawat dalam bentuk sistem kontrol Fly-By-Light (FBL) [Atul Garg]. Dikutip dalam tesis Bryan, diawal tahun 90 an telah di eksplorasi program
Fiber Optic Control System (FOCSI)
oleh NASA/Angkatan laut, termasuk komunikasi data digital dan sensor optik pasif. Pada Gambar 3 dapat dilihat sejarah aplikasi FBW dan FBL, dimana FBW menjadi patokan/ukuran standar kontrol terbang pesawat udara dan serat optik menjadi media pilihan untuk performansi komunikasi yang tinggi. Beberapa mencoba untuk membuat menggabungkan keduanya dan menciptakan
Flight-By-Light (FBL). Gambar 2. Serat Optik. Sumber: ballo.wordpress.com
Fly-By-Light (FBL) mengandalkan pada
sistem yang sama pada FBW kecuali semua sensor berdasarkan pada prinsip kerja optik dari pada elektronik atau elektrikal. Pada tipe sistem kontrol ini, perintah sinyal input dikirim ke aktuator melalui medium serat optik. Arus balik dari permukaan kontrol dan sistem lain berjalan dengan arah yang sama. Komputer menyediakan data dari pergerakan kontrol permukaan pesawat melalui kabel ini. Hal ini menguntungkan pada ketahanan terhadap interferensi elektromagnetik (Electromagnetic Interference/EMI) dan intensitas medan radiasi yang tinggi (High
Intensity Radiated Fields/HIRF), data bandwith yang besar, berat yang ringan yang mengurangi kebutuhan maintenance, lebih tahan terhadap
impuls elektromaknetik dari sistem FBW
konvensional. Teknologi FBL tidak memerlukan kawat – kawat dan tahan secara alami terhadap
gangguan elektromagnetik, dengan kemampuan kontrol yang sama pada sistem fly-by-wire (FBW) tanpa kebutuhan pelindung tambahan.
Harrier AV-8B adalah pesawat tempur pertama dari hasil uji coba serat optik untuk aplikasi sistem kontrol terbang, serat optik tunggal dengan panjang 43 ft untuk hubungan komunikasi data, navigasi dan identifikasi, disertai cadangan elektrikal. Mampu beroperasi 45.000 jam terbang tanpa adanya kesalahan.
Sambungan serat optik pada Harrier sangat sederhana, data bandwith rendah pada sambungan data optiknya. Diawal terdapat permasalahan
maintenance akibat dari rute yang terlalu sedikit,
namun performansi sambungan/link berjalan dengan baik dalam operasi sebenarnya. Hal ini menunjukkan bahwa serat optik dapat diandalkan pada pesawat tempur yang dapat terbang pada kondisi yang keras.
Gambar 3. Garis waktu kontrol terbang dan serat optik Sumber: Tesis Bryan William Harris
5 Serat optik juga diimplementasikan pada
pesawat tempur yang lain seperti pesawat F-16, F-18 Super Hornet, Lockheed Martin F-22, F-35, Eurofighter Typhoon yang diterbangkan di tahun 2004, dan pesawat transportasi militer EC 130 H Block 30 yang memuat terminasi serat optik lebih banyak dari pada pesawat udara lainnya. Pesawat komersil seperti Boeing 777 juga memiliki jaringan kerja serat optik untuk avionic maupun fasilitas layar hiburan sejak tahun 1995. Demikian juga pesawat Boeing 787, memiliki tulang belakang serat optik yang memuat 110 link serat individu dan 1,7 km kabel serat optik.
Sensor
Sensor adalah komponen elektronika yang berfungsi untuk mengubah besaran mekanis, magnetis, panas, sinar dan kimia menjadi besaran listrik berupa tegangan resistansi dan arus listrik.
Sensor sering digunakan untuk pendeteksian pada saat melakukan pengukuran atau pengendalian. Sensor serat optik banyak digunakan pada
ground test dan disain. Namun beberapa sensor
serat optik sudah onboard pada pesawat yang mengudara. Salah satunya adalah fiber optic
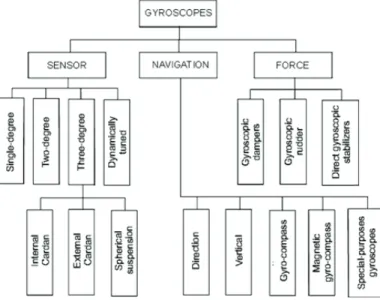
gyroscope. Sensor gyroscope digunakan sebagai
alat pengukuran dan diletakkan pada benda
Vol. 12 No. 2 Desember 2017 Gambar 5. Harrier AV-8B. Sumber: Tesis Bryan William Harris
yang bergerak, Gyroscope navigasi mengukur bidang cakrawala dan meridian. Force
Gyroscope melakukan pengendalian momen
dalam sistem untuk menstabilkan sudut dan mengurangi getaran (contohnya tipe flatter) dan berperan sebagai platform penstabil pada sistem mentarget obyek dan pelacakan obyek (contohnya peluru meriam dan roket).
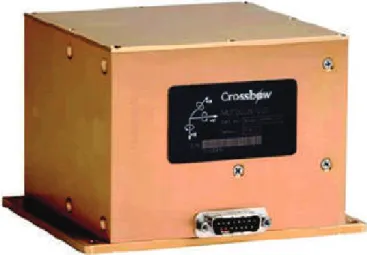
Dimulai dari aplikasi laser yang dikembangkan untuk instrumentasi avionic, pada platform navigasi inersia, fiber optik gyroscope menjadi penelitian yang dilakukan oleh Vali dan Shorthill di tahun 1976 karena sensitivitasnya yang lebih besar dan tidak memerlukan mekanik yang bergerak. Salah satu contoh sensor fiber optik gyroscope dengan 3 sumbu sudut dapat dilihat pada Gambar 8. Serat optik teraplikasi pada pesawat Gambar 7. Klasifikasi gyroscope. Sumber: buku karangan Awrejcewicz
7
S
atelit mikro merupakan satelit ukurankecil dengan berat di bawah 200 kg. Dalam kehidupan sehari-hari, satelit menjadi penting untuk mengeksplorasi ruang angkasa serta observasi bumi dari ruang angkasa. Untuk menjalankan misinya tersebut diperlukan sistem kontrol yang baik.
Attitude Determination and Control System
(ADCS) adalah sebuah sistem kontrol yang bertujuan untuk mengendalikan orientasi sebuah obyek. Sistem kontrol ini digunakan untuk mengendalikan keadaan obyek terhadap kerangka atau sumbu acuan dari bidang tertentu, seperti bidang x, y, dan z. Tujuannya supaya obyek yang dikendalikan dapat mempertahankan keadaan posisinya terhadap bidang acuan yang sudah ditentukan, meskipun obyek tersebut terus bergerak dan mendapat gangguan dari luar sistem.
ADCS satelit memiliki beberapa aktuator seperti reaction wheel, magnetic torque dan gas. Setiap jenis aktuator ini memiliki kelebihan dan kekurangannya masing-masing.
Reaction wheel memiliki akurasi yang baik,
namun lebih boros dalam penggunaan daya listrik. Magnetic torque memiliki akurasi kurang baik dibandingkan dengan reaction
wheel, namun pemakaian daya listriknya
lebih hemat. Sedangkan gas memiliki akurasi yang baik namun jika persediaan gas habis maka tidak bisa kita isi kembali. Reaction
wheel berfungsi untuk mengendalikan rotasi
dan sudut kemiringan dari satelit sehingga satelit tersebut dapat menunjuk ke arah obyek yang akan di-capture. Untuk mengendalikan satelit, reaction wheel akan berputar dengan kecepatan dan arah yang sesuai dengan arah yang diinginkan. Untuk memperoleh sudut yang diinginkan digunakan Inertial
Measurement Unit (IMU) yang merupakan
alat yang memanfaatkan sistem pengukuran dari gyroscope dan accelerometer.
INERTIAL MEASUREMENT
UNIT (IMU) PADA SISTEM
PENGENDALI SATELIT
MEMS GYROSCOPE
Teknologi MEMS gyroscope mengambil ide dari Foucault pendulum dan menggunakan elemen bergetar, yang dikenal sebagai
Micro Electro-Mechanical System (MEMS). Gyroscope berbasis MEMS awalnya dibuat
praktis dan producible oleh Systron Donner
Inertial (SDI). Pada umumnya gyroscope
terdiri dari tiga jenis, yaitu mechanical
gyroscope, piezoelektrik gyroscope, dan MEMS gyroscope. MEMS gyroscope
merupakan gyroscope paling modern. MEMS
gyroscope berukuran kecil (molekul) yang
dibuat di atas selembar silicon, bersama dengan elektronik pada permukaannya. Sistem ini bergetar pada tingkat tinggi seperti halnya pada gyroscope piezoelektrik.
Gyroscope adalah sensor yang
mendeteksi kecepatan sudut eksternal.
Gyroscope memiliki kesamaan prinsip kerja
dengan accelerometer. Namun, gyroscope dapat mengubah input kecepatan sudut perpindahan massa. Untuk tujuan ini,
gyroscope menggunakan prinsip percepatan coriolis, dimana massa gyroscope bergetar
dalam satu poros, dan ketika ada kecepatan sudut eksternal, massa tersebut mulai bergetar dalam sumbu lain sesuai dengan prinsip percepatan coriolis. Kedua getaran tersebut memiliki besar yang sebanding dengan besarnya kecepatan sudut yang diberikan. Oleh karena itu, skema penginderaan
gyroscope memiliki besar kecepatan sudut
masukan dengan mengekstraksi besarnya getaran sekunder.
ACCELEROMETER
Accelerometer adalah suatu perangkat
elektromekanik yang mengukur gaya akselerasi. Gaya ini dapat berupa gaya statis seperti gaya gravitasi konstan dan
Vol. 12 No. 2 Desember 2017 Desti Ika Suryanti
gaya dinamis yang disebabkan oleh pergerakan atau getaran dari akselerometer. Prinsip kerja perangkat ini berdasarkan hukum fisika yaitu apabila suatu konduktor digerakkan melalui suatu medan magnet, atau apabila suatu medan magnet digerakkan melalui suatu konduktor, maka akan timbul suatu tegangan induksi pada konduktor tersebut.
INERTIAL MEASUREMENT UNIT (IMU)
Inertial Measurement Unit (IMU)
adalah suatu alat elektronik yang memanfaatkan pembacaan dari sensor gyroscope dan
accelerometer untuk mendapatkan nilai
perkiraan posisi relatif, kecepatan, serta akselerasi dari putaran motor. IMU merupakan bagian dari sistem navigasi yang lebih dikenal dengan nama Inertial Navigation System (INS). IMU pertama kali didemonstarikan oleh C.S. Draper pada tahun 1949. IMU sering digunakan pada kendaraan udara untuk bermanuver termasuk UAV dan kendaraan luar angkasa seperti satelit, karena IMU bekerja dengan mendeteksi tingkat percepatan serta perubahan variabel rotasi, termasuk pitch, roll, dan yaw. Pitch, roll, dan
yaw masing-masing merupakan rotasi dari ketiga
dimensi yaitu dimensi x, dimensi y, dan dimensi z. Ketiga sudut roll, pitch, dan yaw menetukan orientasi (attitude) dari sebuah satelit di ruang angkasa terhadap bumi.
IMU sudah beredar luas secara komersil dengan tipe, ukuran dan bentuk yang berbeda-beda. Berdasarkan jumlah Degree of Freedom (DOF), IMU dapat dibedakan menjadi empat, yaitu IMU dengan tiga buah DOF, IMU dengan lima buah DOF, IMU dengan enam buah DOF, dan IMU dengan sembilan buah DOF. Perbedaannya ada pada jumlah komponen yang digunakan pada IMU tersebut. IMU dengan tiga buah DOF memiliki konfigurasi sensor berupa dua buah akselerometer dan satu buah giroskop yang mengukur yaw. IMU dengan lima buah DOF memiliki konfigurasi sensor berupa tiga buah akselerometer dan dua buah giroskop mengukur pitch dan roll. IMU dengan enam buah DOF memiliki konfigurasi sensor berupa tiga buah akselerometer dan tiga buah giroskop mengukur pitch, roll, dan yaw. IMU dengan Sembilan buah DOF memiliki konfigurasi sensor berupa tiga buah akselerometer, tiga buah giroskop mengukur pitch, roll, dan yaw, serta tiga buah magnetometer.
Berdasarkan cara pemasangannya, ada dua jenis IMU yang sering digunakan, yaitu IMU
gimbaled (Gambar 1) dan IMU strap-down
(Gambar 2). IMU strap-down banyak dipakai saat ini. Prinsip kerja IMU yaitu mempertahankan 6-degree-of-freedom (DOF) yang memperkirakan gerakan yaitu posisi (X, Y, dan Z) serta orientasi (roll, pitch dan yaw).
Blok diagram cara kerja IMU di tunjukkan pada Gambar 3. Berdasarkan blok diagram
Gambar 1. Inertial Measurement Unit (IMU) gimbaled
9
tersebut IMU menggunakan tiga buah
accelerometer orthogonal dan tiga buah gyroscope orthogonal. Nilai yang terbaca
oleh gyroscope (ω) diintegrasikan untuk mempertahankan perkiraan orientasi motor (θ) secara terus menerus. Pada waktu yang sama, tiga buah accelerometer digunakan untuk memperhitungkan nilai akselerasi dari motor. Nilai ini kemudian di transformasikan melalui perhitungan dari nilai orientasi motor relative terhadap gravitasi, sehingga vector gravity dapat dihitung dan diekstrak berdasarkan pengukuran. Hasil akselerasi kemudian diintegrasi untuk mendapatkan nilai kecepatan motor dan kemudian diintegrasi lagi untuk mendapatkan nilai posisi (r).
Sensor gyro berfungsi untuk
mengukur kecepatan putar dari sudut roll, sudut pitch dan sudut yaw. Kecepatan putar adalah perubahan sudut terhadap satuan waktu. Accelerometer berfungsi untuk mengukur percepatan dari sebuah benda yang bergerak, seperti satelit, pesawat terbang atau UAV yang sedang bergerak dengan percepatan tertentu. Sensor gyroscope yang berada dalam MEMS berukuran kecil (antara 1 sampai 100 mikrometer ukuran rambut manusia)
yang apabila sensor ini diputar maka massa beresonansi kecil digeser sebagai perubahan atas kecepatan sudut. Gerakan ini diubah menjadi sinyal listrik yang sangat rendah yang dapat diperkuat dan dibaca oleh mikrokontroler.
Accelerometer pada IMU berfungsi
untuk mengkompensasi drift/ error yang terjadi pada sudut roll dan sudut pitch, karena accelerometer dapat dipakai untuk menentukan sudut-sudut attitude seperti sudut roll dan sudut pitch, meskipun secara langsung accelerometer mengukur gaya gravitasi.
IMU sangat sensitif mengukur
kesalahan pada gyroscope dan
accelerometer. Penyimpangan atau kesalahan bacaan pada kedua sensor tersebut dapat mengakibatkan kesalahan perhitungan dari orientasi motor dan mengakibatkan kegagalan misi dari satelit. Kombinasi dari accelerometer dan gyroscope memungkinkan kita untuk melakukan tracking dan dapat menangkap gerakan secara penuh dalam bentuk 3D (tiga dimensi). Hal ini dapat meningkatkan kinerja dalam sistem navigasi satelit untuk mendapatkan hasil yang akurat.
Vol. 12 No. 2 Desember 2017 Gambar 3. Diagram blok Inertial Measurement Unit (IMU)
SUHU PERMUKAAN LAUT
Suhu Permukaan Laut (SPL) merupakan salah satu parameter geofisika yang diperlukan oleh peneliti untuk berbagai aplikasi. Teknik konvensional yang dapat digunakan untuk mendapatkan nilai suhu permukaan laut adalah dengan menggunakan kapal, stasiun pantai atau buoy dalam wilayah cakupan yang terbatas. Teknologi satelit memungkinkan kita untuk melakukan pengukuran SPL dengan lebih cepat dan cakupan yang luas.
Metode untuk menentukan SPL dari satelit penginderaan jauh mencakup sensor optik (kanal inframerah termal) dan
microwave. Kedua metode tersebut mempunyai
kelebihan dan kelemahannya masing-masing. Keterbatasan utama menggunakan sensor optik adalah adanya tutupan awan terutama di wilayah tropis seperti di Indonesia. Di wilayah ini, sistem sensor microwave mempunyai keuntungan tambahan untuk menghasilkan pencahayaannya sendiri, kemampuannya untuk menembus awan dan beroperasi di berbagai kondisi iklim. Tulisan ini akan membahas pemanfaatan sensor microwave, yaitu sensor Advanced Microwave Scanning
Radiometer-2 (AMSR-2) untuk suhu
permukaan laut.
SENSOR AMSR-2
Advanced Microwave Scanning Radiometer-2 (AMSR-2) adalah sensor
pasif microwave dari satelit Global Change
Observation Mission – Water (GCOM-W1)
milik Japan Aerospace Exploration Agency (Jaxa) yang diluncurkan pada tanggal 18 Juli 2012. Sensor AMSR-2 adalah penerus sensor AMSR pada satelit Jepang ADEOS-II dan AMSR-E pada satelit NASA Aqua. Keberhasilan sistem pendahulunya (sensor
Memantau Suhu Permukaan
Laut dengan Sensor Advanced
Microwave Scanning
Radiometer-2 (AMSR-2)
AMSR) dalam memantau fenomena seperti El Nino, La Nina, dan laut es di daerah kutub membuat instrument microwave buatan Jepang terpercaya. Kedua sensor tersebut juga telah berkontribusi untuk aplikasi praktis, seperti prediksi cuaca numerik oleh Japan Meteorological Agency (JMA) dan informasi kondisi laut untuk nelayan oleh Japan Fisheries Information
Service Center (JAFIC).
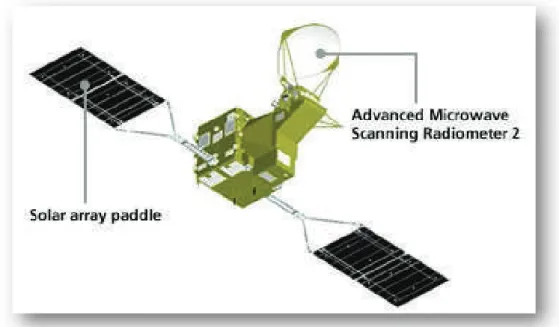
GCOM-W1 tergabung dengan konstelasi A-Train yang dipimpin oleh NASA. A-Train atau Afternoon Constellation adalah gabungan beberapa satelit yang mempunyai jalur orbit yang sama yang saling mengikuti satu sama lain. Ada enam satelit yang tergabung dalam A-Train, yaitu OCO-2, GCOM-W1, Aqua, CALIPSO, CloudSat, dan Aura (Gambar 1). Keikutsertaan GCOM-W1 ke dalam konstelasi A-Train memungkinkan pengamatan simultan dengan instrument yang dipasang di satelit lain dan akan meningkatkan penelitian ilmiah menggunakan data AMSR-2. Karakteristik sensor AMSR-2 pada satelit GCOM-W1 secara umum dan tiap kanalnya ditampikan pada Tabel 1 dan 2, sedangkan penampakkan satelit GCOM-W1 ditampilkan pada Gambar 2.
Yennie Marini - Pusat Pemanfaatan Penginderaan Jauh - LAPAN [email protected]
11
AKTUALITA
Vol. 12 No. 2 DESEMBER 2017
11
Tabel 1. Karakteristik GCOM-W1/AMSR2
Scan and rate
Conical scan at 40 rpm
Antenna
Offset parabola with 2.0 m diameters
Swath width
1450 km
Incidence angle
Nominal 55 degrees
Digitization
12 bits
Dynamic range
2.7 – 340.000
Polarization
Vertical and horizontal
Sumber : https://www.star.nesdis.noaa.gov/mirs/amsr2.php
Tabel 2. Karakteristik Kanal Karakteristik GCOM-W1/AMSR2
Center Freq.
[GHz]
Band Width
[MHz]
Polarization
(Ground res. [km])
Beam width [deg]
interval [km]
Sampling
6.925
350
V and H
1.8 (35x62)
10
7.30
350
V and H
1.8 (35x62)
10
10.65
100
V and H
1.2 (24x42)
10
18.7
200
V and H
0.65 (14x22)
10
23.8
400
V and H
0.75 (15x26)
10
36.5
1000
V and H
0.35 (7x12)
10
89.0
3000
V and H
0.15 (3x5)
5
Sumber : https://www.star.nesdis.noaa.gov/mirs/amsr2.phpGambar 2. Satelit GCOM-W1 [Sumber: http://global.jaxa.jp/countdown/f21/overview/shizuku_e.htm]
Produk Data Sensor AMSR-2
Sensor AMSR-2 pada satelit GCOM-W1 adalah
instrumen penginderaan jauh untuk mengukur emisi
panjang gelombang microwave lemah dari permukaan
dan atmosfer bumi. Dari ketinggian 700 km di atas
permukaan bumi, sensor AMSR-2 akan memberikan
pengukuran intensitas emisi microwave dengan akurasi
tinggi. Antena AMSR-2 berotasi per 1,5 detik dan
AKTUALITA
Vol. 12 No. 2 DESEMBER 2017 11
Tabel 1. Karakteristik GCOM-W1/AMSR2
Scan and rate Conical scan at 40 rpm Antenna Offset parabola with 2.0 m diameters
Swath width 1450 km
Incidence angle Nominal 55 degrees
Digitization 12 bits
Dynamic range 2.7 – 340.000
Polarization Vertical and horizontal
Sumber : https://www.star.nesdis.noaa.gov/mirs/amsr2.php
Tabel 2. Karakteristik Kanal Karakteristik GCOM-W1/AMSR2
Center Freq.
[GHz] Band Width [MHz] Polarization (Ground res. [km]) Beam width [deg] interval [km] Sampling
6.925 350 V and H 1.8 (35x62) 10 7.30 350 V and H 1.8 (35x62) 10 10.65 100 V and H 1.2 (24x42) 10 18.7 200 V and H 0.65 (14x22) 10 23.8 400 V and H 0.75 (15x26) 10 36.5 1000 V and H 0.35 (7x12) 10 89.0 3000 V and H 0.15 (3x5) 5 Sumber : https://www.star.nesdis.noaa.gov/mirs/amsr2.php
Gambar 2. Satelit GCOM-W1 [Sumber: http://global.jaxa.jp/countdown/f21/overview/shizuku_e.htm]
Produk Data Sensor AMSR-2
Sensor AMSR-2 pada satelit GCOM-W1 adalah instrumen penginderaan jauh untuk mengukur emisi panjang gelombang microwave lemah dari permukaan
dan atmosfer bumi. Dari ketinggian 700 km di atas permukaan bumi, sensor AMSR-2 akan memberikan pengukuran intensitas emisi microwave dengan akurasi tinggi. Antena AMSR-2 berotasi per 1,5 detik dan
Vol. 12 No. 2 Desember 2017 Gambar 2. Satelit GCOM-W1 [Sumber: http://global.jaxa.jp/countdown/f21/overview/shizuku_e.htm]
12
Sensor AMSR-2 pada satelit GCOM-W1 adalah instrumen penginderaan jauh untuk mengukur emisi panjang gelombang microwave lemah dari permukaan dan atmosfer bumi. Dari ketinggian 700 km di atas permukaan bumi, sensor AMSR-2 akan memberikan pengukuran intensitas emisi
microwave dengan akurasi tinggi. Antena
AMSR-2 berotasi per 1,5 detik dan menghasilkan data
swath sejauh 1450 km. Mekanisme pengamatan
kerucut (conical scanning) ini memungkinkan AMSR-2 menghasilkan data set siang dan malam dengan cakupan 99% permukaan bumi tiap 2 hari. Dengan menggunakan kanal multi frekuensi AMSR-2 dapat menghasilkan estimasi hujan, uap air, SPL, dan kecepatan angin di atas permukaan laut global.
Data AMSR-2 tersedia di website Remote
Sensing System (RSS). RSS adalah sebuah
AKTUALITA
menghasilkan data swath sejauh 1450 km. Mekanisme pengamatan kerucut (conical scanning) ini memungkinkan AMSR-2 menghasilkan data set siang dan malam dengan cakupan 99% permukaan bumi tiap 2 hari. Dengan menggunakan kanal multi frekuensi AMSR-2 dapat menghasilkan estimasi hujan, uap air, SPL, dan kecepatan angin di atas permukaan laut global.
Data AMSR-2 tersedia di website Remote Sensing
System (RSS). RSS adalah sebuah perusahaan penelitian
ilmiah yang terletak di California bagian utara dan mempunyai spesialisasi dalam penginderaan jauh bumi
menggunakan satelit microwave. Berdiri sejak tahun 1974 oleh Frank J. Wents.
Data AMSR-2 yang tersedia di RSS sejak tanggal 2 Juli 2012, terdiri dari data SPL, Surface Wind Speeds (low and medium frequency), Atmosperic Water Vapor,
Cloud Liquid Water, dan Rain Rate. Data dapat diunduh
pada link http://data.remss.com/amsr2, dengan sebelumnya mendaftar sebagai user di website RSS. Data yang tersedia adalah data harian, rata-rata 3-harian, mingguan, dan bulanan. Gambar-gambar berikut adalah contoh-contoh produk data sensor AMSR-2.
(a) Suhu Permukaan Laut (b) Surface Wind Speeds Low Frequency
(c) Surface Wind Speeds Medium Frequency (d) Atmosperic Water Vapor
(e) Cloud Liquid Water (f) Rain Rate
Gambar 3. Produk Harian Data Sensor AMSR-2 [http://data.remss.com/amsr2]
di California bagian utara dan mempunyai spesialisasi dalam penginderaan jauh bumi menggunakan satelit microwave. Berdiri sejak tahun 1974 oleh Frank J. Wents.
Data AMSR-2 yang tersedia di RSS sejak tanggal 2 Juli 2012, terdiri dari data SPL, Surface
Wind Speeds (low and medium frequency), Atmosperic Water Vapor, Cloud Liquid Water,
dan Rain Rate. Data dapat diunduh pada
link http://data.remss.com/amsr2, dengan
sebelumnya mendaftar sebagai user di website RSS Data yang tersedia adalah data harian, rata-rata 3-harian, mingguan, dan bulanan. Gambar-gambar berikut adalah contoh-contoh produk data sensor AMSR-2.
13
AKTUALITA
Vol. 12 No. 2 DESEMBER 2017 13
(a) Suhu Permukaan Laut (b) Surface Wind Speeds Low Frequency
(c) Surface Wind Speeds Medium Frequency (d) Atmosperic Water Vapor
(e) Cloud Liquid Water (f) Rain Rate
Gambar 4. Produk Rata-rata 3-Harian Data Sensor AMSR-2 [http://data.remss.com/amsr2]
AKTUALITA
14 Vol. 12 No. 2 DESEMBER 2017
(a) Suhu Permukaan Laut (b) Surface Wind Speeds Low Frequency
(c) Surface Wind Speeds Medium Frequency (d) Atmosperic Water Vapor
(e) Cloud Liquid Water (f) Rain Rate
Gambar 5. Produk Rata-rata Mingguan Data Sensor AMSR-2 [http://data.remss.com/amsr2]
Vol. 12 No. 2 DESEMBER 2017 15
(a) Suhu Permukaan Laut (b) Surface Wind Speeds Low Frequency
(c) Surface Wind Speeds Medium Frequency (d) Atmosperic Water Vapor
(e) Cloud Liquid Water (f) Rain Rate
Gambar 6. Produk Rata-rata Bulanan Data Sensor AMSR-2 [http://data.remss.com/amsr2]
Suhu Permukaan Laut Data AMSR-2
RSS menyediakan data SPL harian, 3-harian, mingguan dan bulanan. Data harian terdiri dari dua liputan data, yaitu ascending orbit segment (siang hari) dan descending orbit segment (malam hari). Data 3-harian, merupakan data rata-rata 3 hari dan termasuk tanggal data. Misalnya data 3-harian tanggal 3 April 2017, maka data tersebut merupakan rata-rata dari data tanggal 1, 2, dan 3 April 2017. Data mingguan merupakan data rata-rata 7 hari, yang dimulai dari hari Minggu hingga Sabtu. Misalnya, tanggal data SPL mingguan adalah 8 April 2017, maka data tersebut merupakan rata-rata dari data harian tanggal 2 April 2017 (Minggu) hingga 8 April 2017 (Sabtu). Sedangkan data bulanan merupakan rata-rata dari semua data dalam satu bulan kalender.
Setiap data binary yang tersedia di
http://data.remss.com/amsr2, terdiri dari empat belas
grid (data harian) dan enam grid (data rata-rata) yang
berukuran 0.25 X 0.25 derajat dari (1440,720) byte peta.
Nilai SPL pada data binary berada pada kisaran 0 – 255, dengan nilai-nilai spesifik yang telah ditentukan adalah: 0 – 250 = nilai SPL
251 = tidak ada nilai SPL dikarenakan hujan 252 = sea ice (tidak digunakan pada data set) 253 = ada liputan data AMSR-2 tapi tidak bagus 254 = tidak ada liputan data AMSR-2
255 = darat
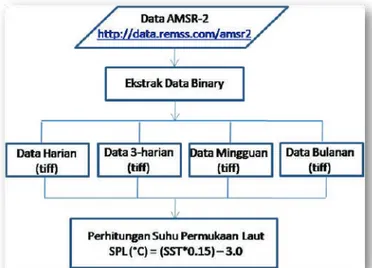
Untuk menghitung suhu permukaan dari data
binary, kalikan dengan faktor skala (0.15), dengan
persamaan sebagai berikut:
𝑺𝑺𝑺𝑺𝑺𝑺𝑺𝑺𝑺𝑺𝑺𝑺 (°𝑪𝑪𝑪𝑪) = (𝑺𝑺𝑺𝑺𝑺𝑺𝑺𝑺𝑺𝑺𝑺𝑺 ∗ 𝟎𝟎𝟎𝟎. 𝟏𝟏𝟏𝟏𝟏𝟏𝟏𝟏) − 𝟑𝟑𝟑𝟑. 𝟎𝟎𝟎𝟎 SPL (°C) = (SST * 0,15) - 3,0
Dimana:
SPL = Suhu Permukaan Laut (°C) SST = Nilai SPL data AMSR-2
Suhu Permukaan Laut Data AMSR-2
RSS menyediakan data SPL harian, 3-harian, mingguan dan bulanan. Data harian terdiri dari dua liputan data, yaitu ascending orbit segment (siang hari) dan descending orbit segment (malam hari). Data 3-harian, merupakan data rata-rata 3 hari dan termasuk tanggal data. Misalnya data 3-harian tanggal 3 April 2017, maka data tersebut merupakan rata-rata dari data tanggal 1, 2, dan 3 April 2017. Data mingguan merupakan data rata-rata 7 hari, yang dimulai dari hari Minggu hingga Sabtu. Misalnya, tanggal data SPL mingguan adalah 8 April 2017, maka data tersebut merupakan rata-rata dari data harian tanggal 2 April 2017 (Minggu) hingga 8 April 2017 (Sabtu). Sedangkan data bulanan merupakan rata-rata dari semua data dalam satu bulan kalender.
Setiap data binary yang tersedia di http:// data.remss.com/amsr2, terdiri dari empat belas
grid (data harian) dan enam grid (data rata-rata)
yang berukuran 0.25 X 0.25 derajat dari (1440,720)
byte peta. Nilai SPL pada data binary berada pada kisaran 0 – 255, dengan nilai-nilai spesifik yang telah ditentukan adalah:
0 – 250 = nilai SPL
251 = tidak ada nilai SPL dikarenakan hujan 252 = sea ice (tidak digunakan pada data set) 253 = ada liputan data AMSR-2 tapi tidak bagus 254 = tidak ada liputan data AMSR-2
255 = darat
Untuk menghitung suhu permukaan dari data
binary, kalikan dengan faktor skala (0.15), dengan
persamaan sebagai berikut:
15
AKTUALITA
16 Vol. 12 No. 2 DESEMBER 2017
Untuk mengekstrak data binary dapat digunakan
program Matlab, Fortran, IDL, atau Python. Setelah
data berhasil diekstrak kemudian data diubah ke dalam
format yang bisa dibaca program-program image
processing, seperti ER Mapper, Envi, dan lain-lain.
Diagram alir pengolahan data AMSR-2 ditampilkan
pada Gambar 7.
Gambar 7. Diagram Alir Pengolahan Data AMSR-2
Data SPL AMSR-2 ascending orbit segment Data SPL AMSR-2 descending orbit segment
Gambar 8. Data SPL Harian Ascending dan Descending Orbit Segment AMSR-2 Tanggal 14 April 2017
Gambar 8 menampilkan liputan data harian
AMSR-2, yaitu ascending orbit segment (siang hari) dan
descending orbit segment (malam hari). Data tersebut
masih dalam selang nilai 0 – 255, agar nilai tersebut
menjadi nilai SPL dalam °C maka harus dikalikan
dengan faktor skala seperti pada rumus di atas. Setelah
dikalikan dengan faktor skalanya, maka tampilannya
menjadi seperti Gambar 9.
Dimana:
SPL = Suhu Permukaan Laut (°C)
SST = Nilai SPL data AMSR-2
Untuk mengekstrak data binary dapat digunakan program Matlab, Fortran, IDL, atau Python. Setelah data berhasil diekstrak kemudian data diubah ke dalam format yang bisa dibaca program-program image processing, seperti ER Mapper, Envi, dan lain-lain. Diagram alir pengolahan data AMSR-2 ditampilkan pada Gambar 7.
Gambar 8 menampilkan liputan data harian AMSR-2, yaitu ascending orbit segment (siang hari) dan descending orbit segment (malam hari). Data tersebut masih dalam selang nilai 0 – 255, agar nilai tersebut menjadi nilai SPL dalam °C maka harus dikalikan dengan faktor skala seperti pada rumus di atas. Setelah dikalikan dengan faktor skalanya, maka tampilannya menjadi seperti Gambar 9.
Untuk mendapatkan data rata-rata harian, maka kedua data tersebut dioverlay dan dihitung rata-rata data hariannya. Gambar hasil rata-rata data harian AMSR-2 diperlihatkan pada Gambar 10.
Proses pengolahan data 3-harian, mingguan, dan bulanan sama dengan data harian. Gambar 11. diperlihatkan SPL harian, 3 harian, mingguan dan bulanan perairan Indonesia. Warna putih pada SPL AMSR-2 menunjukkan tidak adanya informasi SPL, hal ini bukan disebabkan oleh liputan awan, melainkan karena adanya kontaminasi side-lobe. Kontaminasi side-lobe ini menyebabkan tidak adanya informasi SPL pada bagian pesisir.
Dari Gambar 11 terlihat data SPL harian AMSR-2 mempunyai null value (warna putih) yang cukup besar, hal ini bukan karena liputan awan, namun karena adanya kontaminasi side
lobe di daerah pesisir, dan juga karena data
harian AMSR-2 mempunyai 2 liputan data, yaitu
ascending dan descending, ketika kedua data tersebut
digabungkan masih ada area yang tidak terliput.
Data 3-harian AMSR-2 sudah cukup representatif untuk mendapatkan gambaran sebaran SPL Indonesia, berbeda dengan data SPL inframerah, seperti NOAA atau MODIS yang memerlukan data mingguan atau bahkan bulanan untuk bisa memberikan gambaran sebaran SPL Indonesia, hal ini dikarenakan data SPL inframerah sensitif terhadap liputan awan sehingga menyulitkan dalam interpretasinya.
Data satelit AMSR-2 mempunyai kemampuan untuk menghasilkan liputan data tanpa terkendala dengan liputan awan, namun memiliki kekurangan dalam hal resolusi dan kontaminasi side lobe. Data SPL 3-harian dari AMSR-2 sudah bisa digunakan untuk mempelajari SPL secara global. Selain menghasilkan data SPL, data AMSR-2 juga menghasilkan data
Surface Wind Speeds (low and medium frequency), Atmosperic Water Vapor, Cloud Liquid Water, dan Rain Rate.
Vol. 12 No. 2 Desember 2017 Gambar 7. Diagram Alir Pengolahan Data AMSR-2
P
erkembangan perangkat lunak untuk kerekayasaan atau yang biasa disebutComputer Aided Engineering (CAE)
sangat berkembang pesat dalam beberapa tahun terakhir ini. Hal ini disebabkan adanya tren dunia saat ini untuk memodelkan kondisi real ke dalam komputer dengan metode simulasi. Dengan menggunakan simulasi, biaya pengembangan suatu produk teknologi bisa dihemat dalam jumlah yang cukup besar. Salah satu di antara banyak metode yang dikembangkan pada perangkat lunak CAE adalah Multi-Body Simulation (MBS). Perangkat lunak ini dapat digunakan untuk mensimulasikan pengujian drop test pada landing
gear pesawat terbang dan UAV.
Menurut Currey (1988) dalam tulisannya mengenai Aircraft landing gear, design Landing
gear adalah salah satu komponen utama
pada pesawat terbang yang berfungsi untuk penyerapan energi pada waktu proses landing, untuk pengereman dan untuk proses taxi di landasan. Pengujian drop test yang dilakukan pada landing gear bertujuan untuk menentukan gaya kontak/ impak yang terjadi pada saat landing
gear touchdown di landasan. Dari gaya kontak/
impak tersebut diperoleh nilai ground reaction
load factor.
Pada saat ini, perangkat lunak berbasis MBS telah ada dengan variasi yang sangat banyak baik yang berlisensi maupun yang open source. Dari
website Universitas Waterloo Canada, ada sekitar
30 perangkat lunak MBS yang telah dikembangkan. Dari sekian banyak perangkat lunak MBS tersebut, beberapa di antaranya berasal dari Asia, yaitu ReDySim dan RoboAnalyzer yang dikembangkan oleh Indian Institute of Technology.
Dari sekian banyak perangkat lunak MBS yang telah digunakan pada dunia penelitian, pada tulisan ini akan dibahas beberapa perangkat lunak yang populer digunakan untuk simulasi landing
gear drop test.
PERANGKAT LUNAK MULTI-BODY
SIMULATION (MBS) UNTUK SIMULASI
LANDING GEAR DROP TEST (LGDT) PADA
PESAWAT TERBANG DAN UAV
Dony Hidayat - Pusat Teknologi Penerbangan [email protected]
Perangkat lunak MSC ADAMS
Perangkat lunak MSC ADAMS dikembangkan oleh MSC Software yang berpusat di Amerika. MSC
Software merupakan pengembang perangkat lunak
yang banyak digunakan di dunia penerbangan, salah satunya MSC Patran/Nastran. Perangkat lunak MSC ADAMS bertujuan untuk membantu para perekayasa dalam mempelajari dinamika dari benda yang bergerak dan bagaimana beban dan gaya didistribusikan pada suatu sistem mekanikal.
Para peneliti telah banyak menggunakan perangkat lunak ini untuk mensimulasikan drop test pada landing
gear, di antaranya Romeo dkk yang telah mempublikasikan
hal tersebut dalam Archive of Mechanical Engineering pada tahun 2014 dan Hidayat dkk dalam Jurnal Teknologi Dirgantara tahun 2017. Perangkat lunak ini mempunyai kelebihan pada tools analisisnya. Pengguna dapat secara langsung mengolah dan menampilkan data sesuai kebutuhan, serta dapat membuat model simulasi secara langsung.
17
Pada MSC ADAMS, pengguna dapat membuat model simulasi langsung menggunakan perangkat lunak ini, namun proses pembuatan modelnya masih seperti CAD awal tahun 2000-an. Untuk memudahkan, sebaiknya pengguna membuat model menggunakan perangkat lunak CAD seperti CATIA atau Solidworks, kemudian diimpor ke dalam MSC ADAMS.
Perangkat lunak Working Model 2D
Peneliti yang menggunakan perangkat lunak ini untuk simulasi drop test pada landing gear adalah Krason. Krason dkk mengembangkan model Multibody
rigid and 3D FE dengan analisis numerik, yang
dipublikasikan dalam Bulletin of the Polish Academy
of Sciences Technical Sciences tahun 2015. Perangkat
lunak ini dikembangkan oleh Design Simulation
Technology (DST). Working model 2D merupakan
perangkat lunak yang paling laris untuk kategori simulasi gerakan.
Untuk membuat model produk yang akan disimulasikan, pengguna dapat langsung membuatnya pada Working Model 2D. Selain itu, pengguna juga bisa mengimpor dari perangkat lunak CAD, namun hanya dalam bentuk 2 dimensi.
Kekurangan lainnya dari perangkat lunak ini adalah hasil simulasi hanya ditampilkan pada layar monitor saja, tidak seperti perangkat lunak MBS lainnya yang bisa di ekspor menjadi data yang dapat diolah menggunakan perangkat lunak seperti microsoft excel.
Namun di balik kekurangan itu, perangkat lunak ini sangat disukai perekayasa karena sangat cepat dan mudah untuk iterasi awal suatu desain. Pendekatan dua dimensi dari perangkat lunak ini memudahkan perekayasa melakukan perubahan – perubahan pada desainnya
Perangkat lunak SIMPACK
SIMPACK merupakan perangkat lunak yang dikembangkan oleh INTEC GmbH. Namun saat ini SIMPACK dipasarkan oleh Dassault Systemes yang biasa kita kenal sebagai perusahaan yang mengembangkan perangkat lunak CAD yang diberi nama CATIA.
Menurut Dassault dalam SIMPACK, Multibody
Simulation Software (2017), secara umum SIMPACK
adalah perangkat lunak Multi-Body Simulation yang digunakan oleh perekayasa untuk mensimulasikan pergerakan non-linear pada sistem mekanikal dan mekatronik.
Tampilan perangkat SIMPACK sudah seperti perangkat lunak modern saat ini. Berbeda dengan MSC ADAMS dan Working Model 2D yang masih terlihat kaku.
Simulasi landing gear drop test menggunakan SIMPACK dipublikasikan pada situs youtube seperti yang ditampilkan pada Gambar 4.
Vol. 12 No. 2 Desember 2017 Gambar 2. Tampilan perangkat lunak Working Model 2D
Gambar 3. Tampilan perangkat lunak SIMPACK
Gambar 4. LGDT menggunakan perangkat lunak SIMPACK [Sumber:www.youtube.com/watch?v=vPJUjcalNDs]
Analysis
Solidworks Motion Analysis
merupakan modul yang terdapat pada perangkat lunak Solidworks Premium. Perangkat lunak ini dipasarkan oleh
Dassault Systemes seperti SIMPACK. Solidworks Motion Analysis termasuk
ke dalam perangkat lunak entry level, sedangkan SIMPACK masuk ke dalam kelas
high end. Kelebihan dari Solidworks Motion Analysis adalah perangkat lunak ini add on pada Solidworks, jadi hasil dari desain
CAD dapat langsung dianalisis. Sedangkan perangkat lunak lainnya harus diimpor dulu
neutral file dari CAD.
Penelitian tentang simulasi landing
gear drop test menggunakan perangkat
lunak Solidworks Motion Analysis telah dilakukan oleh penulis pada tesis di Universitas Indonesia.
Fitur analisis pada Solidworks Motion
Analysis memang tidak selengkap MSC
ADAMS dan SIMPACK, namun untuk kasus
landing gear drop test, perangkat lunak ini
mampu memberikan analisis yang mirip dengan MSC ADAMS.
Di balik semua kemudahan Solidworks
Motion Analysis ini, ada beberapa
kekurangannya, di antaranya dibutuhkan spesifikasi komputer yang cukup tinggi untuk melakukan simulasi.
Perangkat lunak SimMechanics
SimMechanics yang sekarang berganti nama menjadi Simscape Multibody merupakan perangkat lunak buatan The Mathworks. Bagi pengguna MATLAB pasti sudah akrab dengan The Mathworks. SimMechanics menyediakan simulasi berbasis Multi-Body Simulation (MBS) untuk sistem 3D mekanikal seperti robotik, suspensi pada kendaraan, perlengkapan konstruksi dan landing gear pada pesawat.
Bagi enjiner yang terbiasa
menggunakan perangkat lunak CAE kebanyakan akan sedikit adaptasi dengan perangkat lunak ini karena SimMechanics mempunyai interface seperti simulink. Tampilan blok – blok diagram dan modul – modul sangat dominan pada perangkat lunak ini. Dari website resmi The Mathworks ditampilkan video tentang simulasi pergerakan landing gear retractable seperti yang ditampilkan pada Gambar 6.
Penerapan proses simulasi desain pada pengembangan suatu produk sangat membantu para perekayasa untuk
mengetahui kesalahan desain lebih awal, dapat melakukan perbaikan lebih cepat, dapat menemukan metode yang tepat untuk memperbaiki kesalahan dan yang paling utama dapat melakukan penghematan karena semuanya dilakukan hanya dalam komputer.
Dari 5 perangkat lunak CAE berbasis MBS yang telah diulas di atas, masing–masing mempunyai kelebihan dan kekurangan. Untuk kasus drop test pada landing gear, kelima perangkat lunak tersebut dapat membantu para perekayasa untuk mengetahui gaya kontak/impak yang terjadi saat landing gear dan
touch down di landasan.
Gambar 5. LGDT menggunakan perangkat lunak Solidworks Motion Analysis [Sumber : Hidayat, D., Simulation and Experimental Test of Commuter Aircraft’s Main Landing Gear in Mechanical Engineering2017, Universitas Indonesia: Indonesia]
Gambar 6. LGDT menggunakan perangkat lunak SimMechanics [Sumber:www. mathworks.com/products/simmechanics.html]
19
P
enguasaan Ilmu Pengetahuan danTeknologi Antariksa khususnya di bidang teknologi roket bagi Indonesia masih sulit, sehingga sampai sekarang pengembangan teknologi Roket Pengorbit Satelit (RPS) LAPAN masih jalan di tempat. Salah satu faktor penghambat adalah masalah the Missile
Technology Control Regime (MTCR). Sedangkan
beberapa negara dapat menguasai teknologi roket tanpa melalui kebijakan MTCR salah satunya India.
Pengertian umum MTCR adalah rezim pengendalian teknologi rudal dengan kemampuan jarak jangkau melebihi 300 km dan memiliki muatan sebesar 500 kg yang mampu membawa
MASALAH PENGUASAAN
TEKNOLOGI ANTARIKSA
DI LUAR MTCR
senjata pemusnah massal, weapons of mass
destruction (WMD). MTCR tidak dirancang
untuk menghambat/menghalangi kemajuan dan pengembangan teknologi roket nasional maupun kerjasama internasional sejauh tidak digunakan untuk sistem senjata pemusnah massal.
MTCR merupakan sebuah asosiasi informal dan sukarela dari negara-negara yang memiliki tujuan yang sama untuk melakukan non-proliferasi pada sistem pesawat tanpa awak dan teknologi misil yang mampu membawa senjata pemusnah massal yang menggunakan tenaga nuklir, kimia dan senjata biologis. Negara yang berminat dapat mengajukan keanggotaan pada MTCR, setelah itu anggota MTCR memutuskan
Gambar 1: Pesawat Ulang-Alik ISRO
Zakaria – Biro Kerjasama Hubungan Masyarakat dan Umum [email protected]
diterima atau tidak.
MTCR dibentuk pada tahun 1987 oleh negara G7 (Amerika Serikat, Kanada, Jerman, Perancis, Italia, Jepang, dan Inggris), dimotori oleh Amerika Serikat. Latar belakang berdirinya MTCR adalah adanya kekhawatiran AS terhadap uji coba misil balistik Korea Selatan tahun 1978, upaya Irak membeli roket-roket bertingkat (yang tidak digunakan lagi) dari Italia tahun 1979, uji co ba Satellite Launch Vehicle (SLV-3 ) oleh India tahun 1980, dan uji coba roket oleh perusahaan Jerman Barat di Libya pada tahun 1981.
Sejak berdirinya, MTCR telah berhasil membantu memperlambat dan menggagalkan beberapa negara dalam mengembangkan program rudal balistik. Menurut the Arms
Control Association: “Argentina, Mesir, dan Irak
meninggalkan program rudal balistik bersama penyapu ranjau Condor II mereka. Brasil, Afrika Selatan dan Taiwan juga menunda atau menghapuskan program peluncuran rudalnya. Beberapa negara Eropa Timur, seperti Polandia dan Republik Ceko, menghancurkan rudal balistik mereka. Pada bulan Oktober, 1994 ada kebijakan “no undercut” artinya jika satu anggota tidak menjual teknologi, maka anggota lain harus mematuhinya.
Tidak semua negara yang memiliki kemampuan dalam pengembangan teknologi rudal balistik mematuhi MTCR. Beberapa negara yang telah diketahui melanggar peraturan MTCR secara sembunyi-sembunyi adalah Tiongkok, Iran, Israel, Korea Utara, dan Pakistan yang terus melanjutkan program rudal mereka dan bekerja sama dengan berbagai negara melalui bantuan luar negeri untuk pengembangan rudal balistik jarak menengah yang dapat menempuh jarak lebih dari 1.000 kilometer. Israel, India, Korea Utara dan Tiongkok khususnya telah mengembangkan rudal jelajah yang diluncurkan dari kapal selam,
Submarine Launched Cruise Missile (SLCM)
dan Inter Continental Ballistic Missile (ICBM) berhulu ledak nuklir. Negara-negara tersebut juga menjadi penjual senjata. Korea Utara, misalnya, dipandang sebagai sumber utama proliferasi misil balistik di dunia saat ini. Tiongkok telah memasok misil balistik dan teknologi ke Pakistan. Tiongkok juga memasok misil balistik nuklir jarak menengah satu tingkat berpendorong roket cair dan Intermediate Range Ballistic Missile (IRBM) ke Arab Saudi. Iran telah memasok teknologi rudal ke Suriah, Israel mengekspor sistem peluncuran antariksa Shavit ke negara lain, meskipun pada tahun 1994 pemerintahan Clinton melarang tetapi pada tahun 2002 izin ini dicabut.
anggota MTCR namun telah menyetujui untuk mematuhi pedoman dan membangun Pernyataan Bersama 1994 mengenai Nonproliferasi misil. Pada tahun 2004 Tiongkok mendaftar untuk bergabung dengan MTCR, namun anggota tidak menawarkan keanggotaan Tiongkok karena kekhawatiran tentang standar kontrol ekspor Tiongkok. Israel, Rumania dan Slovakia juga sepakat untuk secara sukarela mengikuti peraturan ekspor MTCR meski belum menjadi anggotanya. Rezim memiliki keterbatasan dalam mengontrol MTCR karena masih terjadi pelanggaran peraturan secara sembunyi-sembunyi.
Badan antariksa yang sukses melakukan transfer teknologi roket antara lain adalah The Indian Space Research Organization (ISRO)
mulai mengembangkan teknologi roket pada tahun 1980 melalui lobi dan pendekatan kerja sama internasional secara intens dengan beberapa negara untuk memperoleh alih teknologi roket. ISRO pernah merintis kerja sama dengan Jepang tapi tidak berhasil. ISRO juga berupaya mendekati perusahaan General Dynamics Corporation guna memperoleh alih teknologi tetapi transfer dana yang diminta sangat tinggi, begitu juga tawaran yang diajukan ke Europe’s Arianespace. Akhirnya ISRO membina hubungan kerja sama dengan negara Soviet Union yang sekarang Rusia. Pihak Soviet bersedia memberikan dua buah mesin roket bekas Soyuz yang pernah digunakan untuk misi ke bulan tahun 1964. Untuk dua motor roket tipe RD-56 dan KVD-1 yang dirancang oleh the
Isayev Design Bureau. ISRO mentransfer dana
sebesar $200 million ke pihak Soviet.
Dengan modal dua buah motor roket dari Soviet tersebut, para peneliti ISRO bekerja keras guna menguasai teknologi roket peluncur satelit berupa Polar Satellite Launch Vehicle (PSLV) di bawah bimbingan ahli roket Uni Soviet. Tahun 1991 ISRO meningkatkan kerja sama dengan Russian Space Agency Glavkosmos guna memperoleh transfer of cryogenic technology. Glavkosmos dan ISRO sepakat melakukan the
manufacture of the cryogenic engines di Kerala Hi-tech Industries Limited (KELTEC).
Pada tahun 1993 Presiden Russia Boris Yeltsin bersedia mentransfer teknologi cryogenic ke ISRO dengan biaya 350 juta US dolar. Tahun 1994, Moscow kembali memperbarui kesepakatan kerja sama guna meningkatkan kemampuan ISRO memproduksi sendiri mesin roket KVD-1. Sekarang ISRO memiliki dua roket peluncur satelit yaitu Polar Satellite Launch Vehicle
(PSLV) dan Geosynchronous Satellite Launch
21
Roket PSLV dan GSLV banyak digunakan oleh berbagai negara termasuk LAPAN. GSLV mampu membawa satelit komunikasi berbobot hingga 5 ton ke orbit GSO. Itu artinya India tak lagi bergantung pada negara lain untuk mengirim satelit berukuran besar ke orbit. Keberhasilan ISRO meluncurkan GSLV MK-III dan berbagai satelit ke orbit merupakan hasil kerja keras para peneliti ISRO tanpa terhalang dengan ketentuan MTCR. ISRO tidak berhenti di situ, sekarang ISRO sedang megembangkan teknologi pesawat ulang-alik guna melanjutkan misi antariksa yang lebih besar seperti misi antar planet. Guna merampungkan proyek besar tersebut ISRO mengalokasikan anggaran setiap tahun mencapai 4-5 triliun rupiah.
Meskipuan dalam proses transfer teknologi roket yang dilakukan ISRO bekerjasama dengan Soviet sekarang Rusia mendapat kecaman dan sangsi dari Amerika karena dianggap melanggar ketentuan kesepakatan MTCR. Tetapi pihak Rusia mengabaikan teguran tersebut. Hanya India yang mendapat sangsi embargo ekspor peralatan teknologi dari Amerika selama dua tahun. Bagi ISRO hal tersebut tidak berpengaruh karena mereka sudah menguasai teknologi roket secara total.
Setelah sukses menguasai teknologi Roket, India baru mengajukan keanggotaan MTCR pada bulan Juni 2015 dan bergabung dengan MTCR pada tanggal 27 Juni 2016 setelah mendapat keputusan konsensus dari anggota MTCR.
Minimal ada tujuh keuntungan bagi India menjadi anggota MTCR yaitu :
• Membuka jalan bagi India untuk membeli teknologi rudal kelas atas,
• Peluang untuk membeli pesawat pengintai mutakhir seperti Predator AS,
• Meningkatkan kerjasama India-Rusia di bidang teknologi roket khususnya pengembangan
Cryogenic engines untuk eksplorasi antariksa
dan misi antar planet,
• India dapat menjual Indo-Russian Supersonic
Cruise Missile (BrahMos) ke Vietnam,
• Peluang India masuk ke Kelompok Pemasok Nuklir, Nuclear Suppliers Group (NSG) yang beranggotakan 48 negara. Kelompok ini akan membantu India melakukan perdagangan secara lebih efektif di bidang teknologi nuklir, • Peluang India mengembangkan Ballistic
Missile System dan membeli misil Arrow II
milik Israel,
• ISRO berterima kasih kepada pemerintah India menjadi anggota MTCR, karena akan memudahkan ISRO dalam pengadaan komponen dan bahan bakar roket. Hal ini akan meningkatkan frekuensi bisnis peluncuran roket PSLV – ISRO.
LAPAN sampai sekarang belum menentukan sikap apakah menjadi anggota MTCR sebagai jalan menuju penguasaan teknologi roket melalui pendekatan sesama anggota atau mencari terobosan di luar keanggotaan MTCR. Keputusan tersebut terus dikaji Oleh Pusat Kajian Kebijakan Penerbangan dan Antariksa (KKPA- LAPAN). Indonesia sebagai negara besar sangat membutuhkan teknologi antariksa khusunya teknologi roket, hal ini sejalan dengan amanat Undang-Undang RI Nomor 21 Tahun 2013 tentang Keantariksaan yang kemudian dijabarkan dalam Peraturan Presiden Nomor 45 Tahun 2017 tentang Rencana Induk Penyelenggaraan Keantariksaan Tahun 2016—2040. Pada saat ini, LAPAN sedang mengembangkan teknologi roket sipil untuk keperluan Roket Pengorbit Satelit (RPS) yang mampu meluncurkan satelit ke orbit rendah Low Earth Orbit (LEO).
Terakhir Kapus KKPA menyelenggarakan
Workshop Posisi Keanggotaan Indonesia Dalam Missile Technology Control Regime (MTCR) di
Hotel NEO Green Savana Sentul City Bogor selama dua hari tanggal 27 – 28 April 2017. Pertemuan tersebut menghimpun berbagai masukan dan tanggapan-tanggapan yang disampaikan oleh para stakeholder. Hasilnya akan disampaikan kepada Kepala LAPAN.
Perkembangan teknologi roket LAPAN ke depan sangat tergantung pada kekuatan lobi dan kesiapan dana untuk kerjama internasional baik diluar maupun di lingkungan anggota MTCR. LAPAN harus dapat mengubah tantangan MTCR menjadi peluang dalam penguasaan teknologi roket. Bravo LAPAN.
P
eristiwa badai debu dan pasir (dustand sand storm) adalah bencana yang
disebabkan oleh cuaca, yaitu unsur angin dan suhu udara. Kejadian badai debu dan pasir memang belum pernah atau bahkan tidak dapat dan tidak mungkin pernah terjadi di Indonesia. Hal ini karena Indonesia adalah negara yang berbentuk kepulauan (maritime continent) sehingga tidak memiliki padang pasir atau gurun pasir yang luas seperti yang terdapat di negara Tiongkok, India, Amerika Serikat, Australia, Asia Tengah (Arab Saudi), dan Kanada yang negaranya berbentuk kontinen atau benua (daratan yang luas). Indonesia hanya memiliki padang rumput yang diselingi pepohonan (sabana) yaitu di kawasan Nusa Tenggara Timur. Untuk badai, Indonesia hanya mengenal dan mendapat bencana badai berupa angin puting beliung.
Badai debu dan pasir memang tidak terjadi di Indonesia, tetapi dampaknya berupa penyebaran debu dan pasir dapat sampai ke
INDIKASI PERUBAHAN
IKLIM DARI PERISTIWA
BADAI DEBU DAN PASIR
Indonesia. Hasil penelitian penulis dan kawan-kawan menggunakan model trayektori Hysplitt, statistika, dan bukti dari citra satelit menunjukkan bahwa kota Bandung telah mendapat pencemaran udara berupa debu yang berukuran kurang 2,5 mikron yang berasal dari daratan Cina dan Australia.
Debu dan pasir yang terbawa oleh badai memiliki dua aspek yaitu fisika dan kimia. Aspek fisik berupa ukuran debu dan pasir, sedangkan aspek kimia mencakup kandungan kimia yang terdapat dalam debu dan pasir tersebut. Ukuran debu dan pasir yang sangat kecil dapat mencapai kurang dari 2 mikron (1 mikron = 10-6 cm) akan
dengan mudah diterbangkan oleh angin dan dapat mencapai Indonesia sebagai bentuk pencemaran udara jarak jauh. Partikel debu yang sangat kecil dapat bergerak melayang sampai jarak 100 – 1000 km.
Secara kuantitas atau fisik PM2,5 adalah debu yang berukuran kurang dari 2,5 mikron,
Gambar 1. Badai debu yang menjadikan langit berwarna kemerahan di Arizona (sumber: https:// www. accuweather. com/en/weather-news)
Lilik S. Supriatin - Kelompok Penelitian Perubahan Iklim Pusat Sains Dan Teknologi Atmosfer, LAPAN
23
tetapi secara kualitas atau kimiawi di dalam PM2,5 juga terkandung unsur kimia. Amonium
nitrat (NH4NO3), ammonium sulfat ((NH4)2SO4), natrium nitrat (NaNO3) dan karbon organik sekunder sebagian besar berukuran kurang dari 2,5 µm.
Mekanisme Pencemaran Udara Jarak Jauh (badai debu dan pasir)
Mekanisme transpor polutan udara jarak jauh ini terjadi karena adanya badai debu dan pasir (dust storm and sand) di wilayah sumber pencemar (negara-negara yang memiliki gurun pasir yang luas). Topografi negara yang memiliki gurun pasir yang luas dan terletak di iklim sub tropis seperti Tiongkok, Rusia, India, Australia, dan Amerika Serikat pada saat musim panas memiliki kecepatan angin yang relatif kuat. Selain itu, dengan kondisi topografi yang berbentuk gurun pasir dan terbuka membuat medan angin bergerak bebas sehingga jika terjadi badai debu dan pasir, angin akan banyak membawa debu dan pasir melintasi negara lain. Badai debu dan pasir adalah fenomena alami yang telah terjadi ribuan tahun silam sampai dengan sekarang. Tabel 1 menyajikan jenis pergerakan partikel debu beserta karakteristiknya.
SOSIALITA
Vol. 12 No. 2 DESEMBER 2017
27
organik sekunder sebagian besar berukuran kurang dari 2,5 µm.
Mekanisme Pencemaran Udara Jarak Jauh (badai debu dan pasir)
Mekanisme transpor polutan udara jarak jauh ini terjadi karena adanya badai debu dan pasir (dust storm
and sand) di wilayah sumber pencemar (negara-negara
yang memiliki gurun pasir yang luas). Topografi negara yang memiliki gurun pasir yang luas dan terletak di iklim sub tropis seperti Tiongkok, Rusia, India, Australia, dan
Amerika Serikat pada saat musim panas memiliki kecepatan angin yang relatif kuat. Selain itu, dengan kondisi topografi yang berbentuk gurun pasir dan terbuka membuat medan angin bergerak bebas sehingga jika terjadi badai debu dan pasir, angin akan banyak membawa debu dan pasir melintasi negara lain. Badai debu dan pasir adalah fenomena alami yang telah terjadi ribuan tahun silam sampai dengan sekarang. Tabel 1 menyajikan jenis pergerakan partikel debu beserta karakteristiknya.
Tabel 1. Klasifikasi Kekuatan Kecepatan Angin
No Katagori Karakteristik Visibilitas horizontal Kondisi cuaca
1. Drifting dust (debu bergerak) Debu tersuspensi di
udara < 10 km Angin lemah
2. Blowing dust (debu terbang) Debu atau pasir
terbawa oleh angin < 10 km Kecepatan angin moderat 3. Dust and sand storm (badai
debu dan pasir) Debu dan pasir terbawa oleh angin yang kuat dan terjadi turbulensi
< 1 km Angin kuat dan
terjadi turbulensi 4. Badai debu dan pasir yang
bengis (severe dust and sand
storm)
Debu dan pasir terbawa oleh angin yang sangat kuat sehingga terjadi turbulensi
< 50 m Angin kuat dan
terjadi turbulensi
Selain kecepatan angin yang kuat, kondisi atmosfer yang turut mendukung terjadinya badai debu dan pasir antara lain:
• Cold wave (gelombang dingin) akan mengakibatkan badai debu dan pasir dengan skala besar. Gelombang dingin sering melanda daratan Siberia dan Mongolia pada musim dingin dan musim semi. Gelombang dingin ini membangkitkan gerakan udara yang kuat dan mendukung adanya kondisi dinamik bagi peristiwa dan perkembangan badai debu dan pasir,
• Angin siklon adalah angin yang masuk ke daerah pusat tekanan udara rendah yang dikelilingi oleh wilayah dengan pusat tekanan udara tinggi. Siklon Mongolia adalah tipe sistem cuaca yang merangsang perkembangan badai debu dan pasir. Siklon Mongolia yang kuat akan membentuk sirkulasi eddy,
• Ketidakstabilan suhu atmosfer sering terjadi di daerah gurun. Ketidakstabilan atmosfer di dekat permukaan akan menyebabkan pergerakan udara vertikal dan pergerakan turbulensi di dekat permukaan yang akan merangsang erosi aeolis
(erosi pada butiran tanah karena pengaruh tenaga angin).
• Selain ke tiga faktor pendukung terjadinya badai debu dan pasir seperti disebutkan di atas. Perubahan kondisi atmosfer yang sangat drastis seperti penurunan kelembapan udara dan arah serta kecepatan angin juga dapat menyebabkan terjadinya badai debu dan pasir.
Indikasi Perubahan Iklim dari Peningkatan Kejadian Badai Debu dan Pasir
Polutan udara berupa debu dan pasir harus diwaspadai. Pertama karena dampak debu dan pasir baik di negara asal tempat sumber badai debu dan pasir terjadi, maupun di negara lain yang terkena dampak penyebarannya.Kandungan kimia dari debu dan pasir yang dihasilkan dari badai debu dan pasir konsentrasinya dapat mencapai ratusan kali lebih besar melebihi baku mutu nasional negara yang terkena dampak pencemaran jarak jauh sehingga lebih berbahaya daripada pencemaran udara lokal. Kandungan kimia dari debu berbahaya bagi kesehatan dan visibilitas atmosfer. Partikulat atau debu dengan konsentrasi lebih besar dari 26 mikrogram/m3 adalah sumber utama haze
dan mendukung adanya kondisi dinamik bagi peristiwa dan perkembangan badai debu dan pasir,
• Angin siklon adalah angin yang masuk ke daerah pusat tekanan udara rendah yang dikelilingi oleh wilayah dengan pusat tekanan udara tinggi. Siklon Mongolia adalah tipe sistem cuaca yang merangsang perkembangan badai debu dan pasir. Siklon Mongolia yang kuat akan membentuk sirkulasi eddy,
• Ketidakstabilan suhu atmosfer sering terjadi di daerah gurun. Ketidakstabilan atmosfer di dekat permukaan akan menyebabkan pergerakan udara vertikal dan pergerakan turbulensi di dekat permukaan yang akan merangsang erosi aeolis (erosi pada butiran tanah karena pengaruh tenaga angin).
• Selain ke tiga faktor pendukung terjadinya badai debu dan pasir seperti disebutkan di atas. Perubahan kondisi atmosfer yang sangat drastis seperti penurunan kelembapan udara dan arah serta kecepatan angin juga dapat menyebabkan terjadinya badai debu dan pasir.
Selain kecepatan angin yang kuat, kondisi atmosfer yang turut mendukung terjadinya badai debu dan pasir antara lain:
• Cold wave (gelombang dingin) akan mengakibatkan badai debu dan pasir dengan skala besar. Gelombang dingin sering melanda daratan Siberia dan Mongolia pada musim dingin dan musim semi. Gelombang dingin ini membangkitkan gerakan udara yang kuat
Indikasi Perubahan Iklim dari Peningkatan Kejadian Badai Debu dan Pasir
Polutan udara berupa debu dan pasir harus diwaspadai. Pertama karena dampak debu dan pasir baik di negara asal tempat sumber badai debu dan pasir terjadi, maupun di negara lain yang terkena dampak penyebarannya.Kandungan kimia dari debu dan pasir yang dihasilkan dari badai debu dan pasir konsentrasinya dapat mencapai ratusan kali lebih besar melebihi baku

![Gambar 1. A-Train [Sumber: https://atrain.gsfc.nasa.gov/]](https://thumb-ap.123doks.com/thumbv2/123dok/4286749.3146890/12.903.383.895.465.765/gambar-train-sumber-https-atrain-gsfc-nasa-gov.webp)
![Gambar 3. Produk Harian Data Sensor AMSR-2 [http://data.remss.com/amsr2]](https://thumb-ap.123doks.com/thumbv2/123dok/4286749.3146890/14.903.106.729.516.1032/gambar-produk-harian-data-sensor-amsr-http-remss.webp)
![Gambar 5. Produk Rata-rata Mingguan Data Sensor AMSR-2 [http://data.remss.com/amsr2]](https://thumb-ap.123doks.com/thumbv2/123dok/4286749.3146890/15.903.167.734.679.1106/gambar-produk-rata-mingguan-data-sensor-amsr-remss.webp)
![Gambar 6. Produk Rata-rata Bulanan Data Sensor AMSR-2 [http://data.remss.com/amsr2]](https://thumb-ap.123doks.com/thumbv2/123dok/4286749.3146890/16.903.114.775.142.715/gambar-produk-rata-bulanan-data-sensor-amsr-remss.webp)