BAB II
TINJAUAN PUSTAKA DAN LANDASAN TEORI
BAB II
TINJAUAN PUSTAKA DAN LANDASAN TEORI 2.1 Tinjauan Pustaka
Pengontrolan robot melalui media nirkabel (wireless) sudah banyak dikembangkan saat ini. Hal ini dikarenakan sistem pengontrolan ini jauh lebih praktis dibandingkan dengan media kabel. Beberapa realisasi kontrol robot jarak jauh yang berhasil penulis temukan dalam literatur antara lain:
1) Perancangan dan Implementasi Kendali Robot Jarak Jauh Melalui Media Wireless Fidelity (Wi-Fi) [1]. Merupakan Tugas Akhir dari Rendy Ariffian dan Elvanno Hatongaran, Mahasiswa Politeknik Negeri Bandung Angkatan 2006 Program Studi D4 Teknik Telekomunikasi Nirkabel. Sistem kendali robot yang direalisasikan menggunakan PC sebagai transmitter kontrolernya dan modul Wiz610WI produk dari Wiznet sebagai receiver pada bagian robot. Modul ini memiliki spesifikasi 802.11 b/g yaitu dengan frekuensi kerja 2,4 GHz. Robot yang dikendalikan merupakan robot beroda yang hanya dapat bekerja pada bidang datar saja.
2) Rancang Bangun Aplikasi Kontrol Robot Ruangan Berbasis Wireless [2]. Realisasi ini dikerjakan oleh Afdhol Dzikri, Tri Ramadani, Iip Iriani, Mardiyanto, mahasiswa Politeknik Negeri Batam. Pada realisasi proyek ini, instruksi dikirimkan dengan komunikasi PC to PC dengan media Wi-Fi. 3) Rancang Bangun Rescue Robot dengan Kendali Wireless [3]. Merupakan
Tugas Akhir dari Fakhruddin, mahasiswa Universitas Hasanuddin. Pada Tugas Akhir ini, direalisasikan sebuah robot yang dapat bergerak di bidang yang cenderung tidak rata. Media transmisi yang digunakan yaitu RF dengan frekuensi kerja 122 Hz dengan jangkauan 20-40 meter. Namun Tugas Akhir ini lebih membahas pada pembuatan robotnya, bukan kontrolernya.
Seperti yang sudah disebutkan di bab sebelumnya, tujuan dari Tugas Akhir ini yaitu merealisasikan suatu kontroler untuk robot rescue. Karena tujuannya untuk rescue, maka dibutuhkan suatu sistem yang praktis dan efisien, baik pada robot rescue-nya, maupun pada kontrolernya.
Pada literatur poin satu, frekuensi kerja yang digunakan sebgai transmisinya yaitu 2,4 GHz, sehingga kebal terhadap interferensi. Namun sistem ini memiliki kelemahan, yaitu pada kontrolernya yang berupa PC sehingga tidak praktis. Selain itu, robot yang digunakan pun hanya dapat bergerak pada bidang yang datar saja.
Sama dengan literatur poin satu, pada literatur point dua menggunakan PC sebagai transmitter kontrolernya. Hal ini tentu kurang efisien jika direalisasikan pada robot rescue. Selain itu, penggunaan komputer client membatasi ruang gerak robot, karena masih terkendala dengan kabel penghubung.
Pada literatur poin tiga, robot yang direalisasikan cukup efektif, karena dibuat sedemikian rupa sehingga dapat bergerak di bidang yang tidak rata. Namun frekuensi kerja yang digunakan untuk media transmisi sangat rendah, sehingga sangat rentan terhadap noise dan interferensi.
Dalam Tugas Akhir ini, akan dibuat suatu sistem pengontrolan pada quadcopter (robot terbang) dengan menggunakan handphone sebagai kontrolernya. Komunikasi yang dilakukan antara quadcopter dan sistem kontrol diubah menggunakan teknologi Internet Protokol (IP) melalui transmisi Wireless Fidelity (Wi-Fi) dengan frekuensi kerja 2,4 GHz. Kontroler ini dapat mengatur pergerakan dari quadcopter.
Berbicara tentang pergerakan quadcopter artinya kita memasuki dunia aeromodelling. Pada dunia aeromodelling, terdapat 3 pergerakan, yakni pitch, roll, dan yaw. Pitch adalah gerakan memiringkan posisi copter (helicopter, quadcopter, hexacopter, dan sebagainya) ke depan atau ke belakang, yaitu untuk membuat copter bergerak maju atau mundur. Roll adalah gerakan memiringkan posisi copter ke kanan atau ke kiri, yaitu untuk membuat copter bergeser ke kanan atau ke kiri. Yaw adalah gerakan memutar ke kiri atau ke kanan, yaitu untuk membelokkan copter ke kanan atau ke kiri.
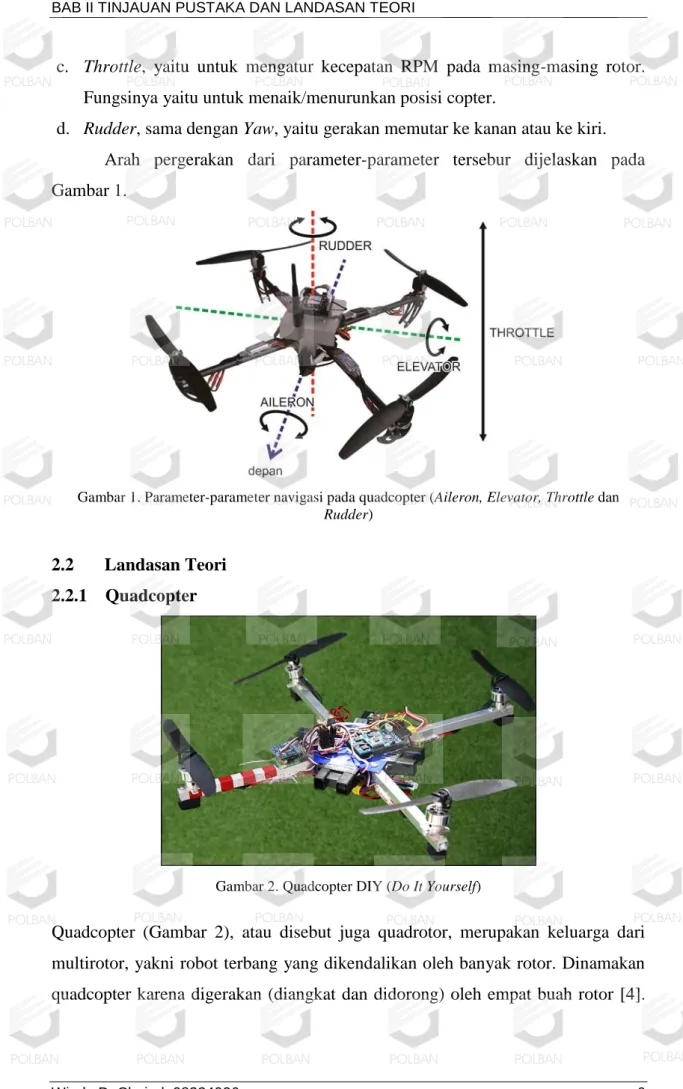
Terdapat 4 parameter navigasi pada dunia aeomodelling, yaitu sebagai berikut:
a. Aileron, yaitu pergeseran copter ke kanan atau ke kiri (Roll) b. Elevator, yaitu pergerakan maju atau mundur pada copter (Pitch)
c. Throttle, yaitu untuk mengatur kecepatan RPM pada masing-masing rotor. Fungsinya yaitu untuk menaik/menurunkan posisi copter.
d. Rudder, sama dengan Yaw, yaitu gerakan memutar ke kanan atau ke kiri. Arah pergerakan dari parameter-parameter tersebur dijelaskan pada Gambar 1.
Gambar 1. Parameter-parameter navigasi pada quadcopter (Aileron, Elevator, Throttle dan
Rudder)
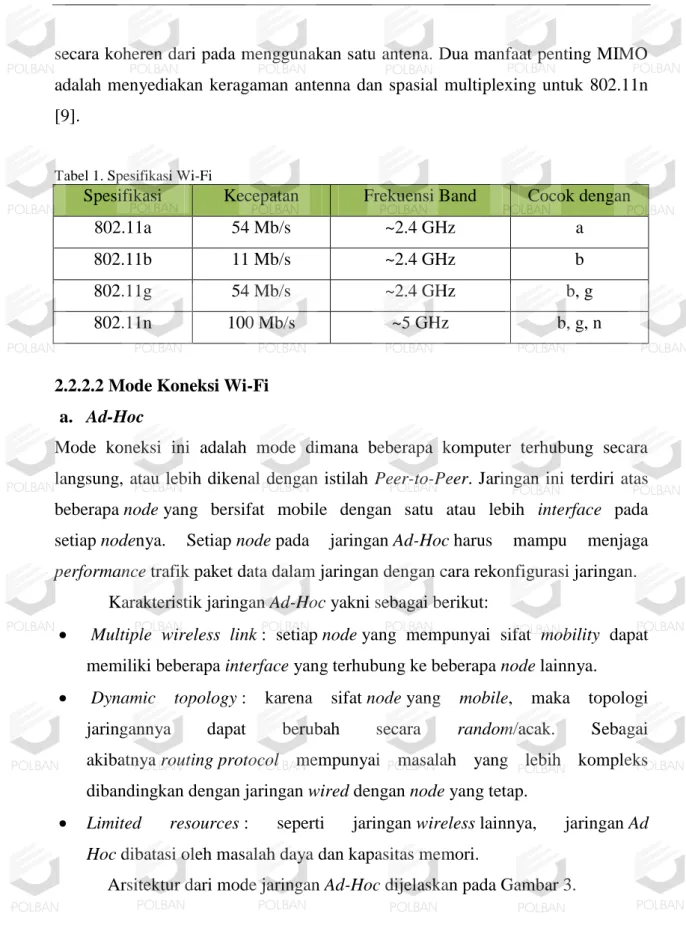
2.2 Landasan Teori 2.2.1 Quadcopter
Gambar 2. Quadcopter DIY (Do It Yourself)
Quadcopter (Gambar 2), atau disebut juga quadrotor, merupakan keluarga dari multirotor, yakni robot terbang yang dikendalikan oleh banyak rotor. Dinamakan quadcopter karena digerakan (diangkat dan didorong) oleh empat buah rotor [4].
Quadcopter yang akan dipakai pada Tugas Akhir ini menggunakan sensor gyro yang berfungsi untuk penstabil gerakan quadcopter.
2.2.2 Wireless Fidelity
Wi-Fi merupakan kependekan dari Wireless Fidelity, yang memiliki pengertian yaitu sekumpulan standar yang digunakan untuk Jaringan Lokal Nirkabel (Wireless Local Area Networks - WLAN) yang didasari pada spesifikasi IEEE 802.11.
Awalnya Wi-Fi ditujukan untuk penggunaan perangkat nirkabel dan Jaringan Area Lokal (LAN), namun saat ini lebih banyak digunakan untuk mengakses internet. Hal ini memungkinan seseorang dengan komputer dengan kartu nirkabel (wireless card) atau Personal Digital Assistant (PDA) untuk terhubung dengan internet dengan menggunakan titik akses (atau dikenal dengan hotspot) terdekat.[5]
Wi-Fi dirancang berdasarkan spesifikasi IEEE 802.11. Sekarang ini ada empat variasi dari 802.11, yaitu:
1. 802.11a 2. 802.11b 3. 802.11g 4. 802.11n
Spesifikasi b merupakan produk pertama Wi-Fi. Variasi g dan n merupakan pengembangan dari produk sebelumnya. Berikut ini diberikan penjelasan spesifikasi Wireless Fidelity (Wi-Fi).
2.2.2.1 Spesifikasi Wi-Fi a. 802.11a
IEEE 802.11a adalah sebuah teknologi jaringan nirkabel yang merupakan pengembangan lebih lanjut dari standar IEEE 802.11 yang asli, namun bekerja pada bandwidth 5.8 GHz dengan kecepatan maksimum hingga 54 Mb/s. Metode transmisi yang digunakan adalah Orthogonal Frequency Division Multiplexing (OFDM), yang mengizinkan pentransmisian data secara paralel di dalam sub-frekuensi. Penggunaan OFDM memiliki keunggulan resistansi terhadap
interferensi dengan gelombang lain, dan tentunya peningkatan throughput. Standar ini selesai diratifikasi pada tahun 1999 [6].
b. 802.11b
IEEE 802.11b merupakan pengembangan dari standar IEEE 802.11 yang asli, yang bertujuan untuk meningkatkan kecepatan hingga 5.5 Mb/s atau 11 Mb/s tapi tetap menggunakan frekuensi 2.45 GHz. Dikenal juga dengan IEEE 802.11 HR. Pada prakteknya, kecepatan maksimum yang dapat diraih oleh standar IEEE 802.11b mencapai 5.9 Mb/s pada protokol TCP, dan 7.1 Mb/s pada protokol UDP.
Standard ini sempat diterima oleh pemakai di dunia dan masih bertahan sampai saat ini. Tetapi sistem b bekerja pada band yang cukup kacau, seperti gangguan pada Cordless dan frekuensi Microwave dapat saling menganggu bagi daya jangkaunya. Standard 802.11b hanya memiliki kemampuan tranmisi standard dengan 11Mbps atau rata rata 5MBbit/s yang dirasakan lambat, mendouble (turbo mode) kemampuan wireless selain lebih mahal tetapi tetap tidak mampu menandingi kemampuan tipe a dan g [7].
a. 802.11g
IEEE 802.11g adalah sebuah standar jaringan nirkabel yang dipublikasikan pada bulan Juni 2003. Standar ini bekerja pada frekuensi 2,45 GHz dan dengan kecepatan mencapai 54 Mb/s. Metode modulasi yang digunakan pada standar ini yaitu dengan menggunakan modulasi sinyal OFDM, sehingga lebih resistan terhadap interferensi dari gelombang lainnya [8].
d. 802.11n
802.11n merupakan pengembangan dari standar 802.11 sebelumnya untuk meningkatkan throughput lebih dari standar sebelumnya, yaitu dengan menambahkan multiple-input multiple-output (MIMO) dan 40 MHz ke lapisan saluran fisik (PHY), dan frame agregasi ke MAC layer. MIMO adalah teknologi yang menggunakan beberapa antena untuk menyelesaikan informasi lebih lanjut
secara koheren dari pada menggunakan satu antena. Dua manfaat penting MIMO adalah menyediakan keragaman antenna dan spasial multiplexing untuk 802.11n [9].
Tabel 1. Spesifikasi Wi-Fi
Spesifikasi Kecepatan Frekuensi Band Cocok dengan
802.11a 54 Mb/s ~2.4 GHz a
802.11b 11 Mb/s ~2.4 GHz b
802.11g 54 Mb/s ~2.4 GHz b, g
802.11n 100 Mb/s ~5 GHz b, g, n
2.2.2.2 Mode Koneksi Wi-Fi a. Ad-Hoc
Mode koneksi ini adalah mode dimana beberapa komputer terhubung secara langsung, atau lebih dikenal dengan istilah Peer-to-Peer. Jaringan ini terdiri atas beberapa node yang bersifat mobile dengan satu atau lebih interface pada setiap nodenya. Setiap node pada jaringan Ad-Hoc harus mampu menjaga performance trafik paket data dalam jaringan dengan cara rekonfigurasi jaringan.
Karakteristik jaringan Ad-Hoc yakni sebagai berikut:
Multiple wireless link : setiap node yang mempunyai sifat mobility dapat memiliki beberapa interface yang terhubung ke beberapa node lainnya.
Dynamic topology : karena sifat node yang mobile, maka topologi jaringannya dapat berubah secara random/acak. Sebagai akibatnya routing protocol mempunyai masalah yang lebih kompleks dibandingkan dengan jaringan wired dengan node yang tetap.
Limited resources : seperti jaringan wireless lainnya, jaringan Ad Hoc dibatasi oleh masalah daya dan kapasitas memori.
Arsitektur dari mode jaringan Ad-Hoc dijelaskan pada Gambar 3.
Gambar 3. Jaringan Ad-hoc
b. Infrastructure
Jaringan ini menggunakan Access Point yang berfungsi sebagai pengatur lalu lintas data, sehingga memungkinkan banyak client dapat saling terhubung melalui jaringan (network). Gambar 4 merupakan arsitektur dari mode jaringan Infrastructure
Gambar 4. Jaringan Infrastructure
2.2.3 Arduino
2.2.3.1 Sekilas Tentang Arduino
Arduino [10] adalah pengendali mikro single-board yang bersifat open-source, diturunkan dari Wiring platform, dirancang untuk memudahkan penggunaan elektronik dalam berbagai bidang. Hardware-nya memiliki prosesor Atmel AVR dan software-nya memiliki bahasa pemrograman sendiri (Arduino Programming Language).
2.2.3.2 Arduino Uno
Arduino Uno [11] merupakan sebuah board mikrokontroler yang berbasis Atmega328. Arduino Uno memiliki 14 pin input/output digital, yang mana 6 diantaranya dapat digunakan sebagai output PWM (Pulse Width Modulation), 6 input analog, sebuah kristal osilator 16 MHz, koneksi USB, power jack, header ICSP, dan tombol reset. Board ini menyediakan segala sesuatu yang dibutuhkan untuk mendukung mikrokontroler, mudah untuk dikoneksikan dengan komputer menggunakan kabel USB atau dapat dinyalakan dengan adapter AC-to-DC/baterai untuk bisa mengaktifkannya. Arduino Uno dapat diprogram dengan software Arduino dengan menggunakan bahasa Arduino.
Tabel 2. Spesifikasi Arduino Uno
Microcontroller ATmega328
Operating Voltage 5V Input Voltage
(recommended)
7-12V
Input Voltage (limits) 6-20V
Digital I/O Pins 14 (of which 6 provide PWM output) Analog Input Pins 6
DC Current per I/O Pin 40 mA DC Current for 3.3V Pin 50 mA
Flash Memory 32 KB (ATmega328) of which 0.5 KB used by bootloader
SRAM 2 KB (ATmega328)
EEPROM 1 KB (ATmega328)
Clock Speed 16 MHz
Arduino Uno dapat diberi sumber daya melalui koneksi USB atau dengan menggunakan power supply eksternal. Sumber daya dipilih secara otomatis. Power supply eksternal (non-USB) bisa didapatkan dari sebuah AC-to-DC adapter atau dari baterai. Adapter dapat dihubungkan dengan menghubungkan plug center-positive 2,1 mm ke power jack pada board. Jika menggunakan baterai sebagai sumber daya, hubungkan polaritas baterai dengan pin Gnd dan Vin pada konektor POWER.
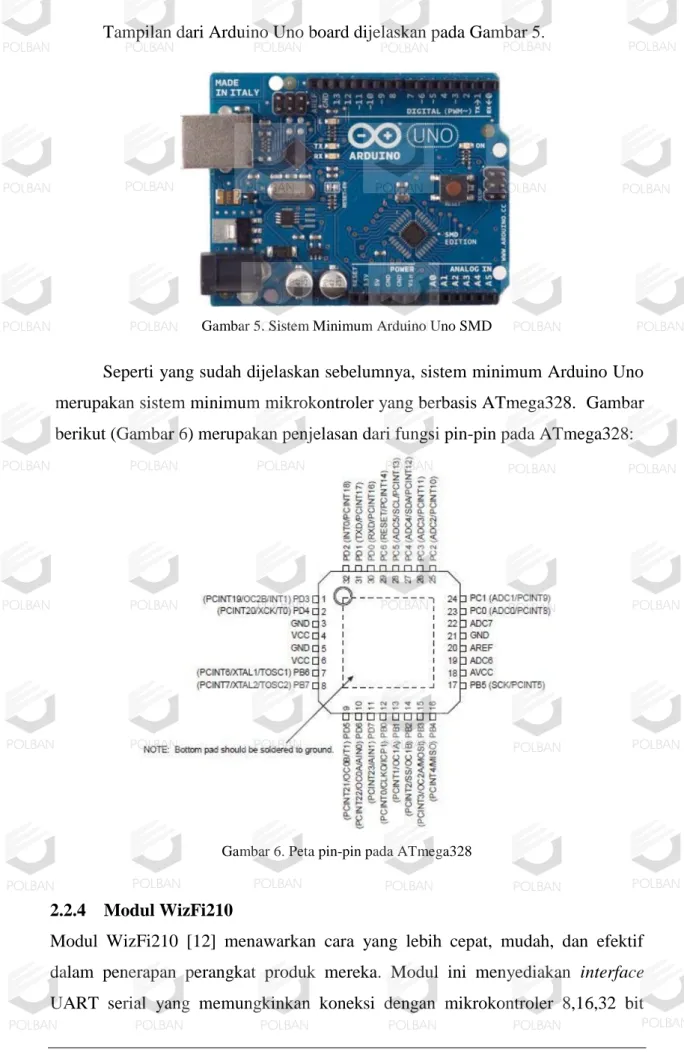
Tampilan dari Arduino Uno board dijelaskan pada Gambar 5.
Gambar 5. Sistem Minimum Arduino Uno SMD
Seperti yang sudah dijelaskan sebelumnya, sistem minimum Arduino Uno merupakan sistem minimum mikrokontroler yang berbasis ATmega328. Gambar berikut (Gambar 6) merupakan penjelasan dari fungsi pin-pin pada ATmega328:
Gambar 6. Peta pin-pin pada ATmega328
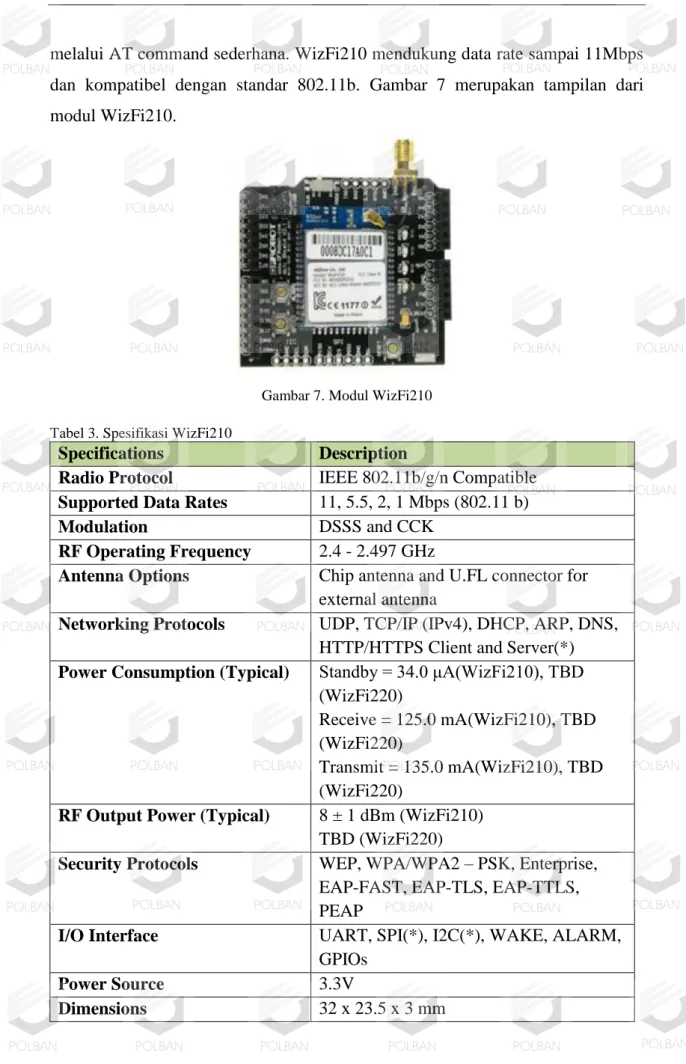
2.2.4 Modul WizFi210
Modul WizFi210 [12] menawarkan cara yang lebih cepat, mudah, dan efektif dalam penerapan perangkat produk mereka. Modul ini menyediakan interface UART serial yang memungkinkan koneksi dengan mikrokontroler 8,16,32 bit
melalui AT command sederhana. WizFi210 mendukung data rate sampai 11Mbps dan kompatibel dengan standar 802.11b. Gambar 7 merupakan tampilan dari modul WizFi210.
Gambar 7. Modul WizFi210 Tabel 3. Spesifikasi WizFi210
Specifications Description
Radio Protocol IEEE 802.11b/g/n Compatible
Supported Data Rates 11, 5.5, 2, 1 Mbps (802.11 b)
Modulation DSSS and CCK
RF Operating Frequency 2.4 - 2.497 GHz
Antenna Options Chip antenna and U.FL connector for external antenna
Networking Protocols UDP, TCP/IP (IPv4), DHCP, ARP, DNS, HTTP/HTTPS Client and Server(*)
Power Consumption (Typical) Standby = 34.0 μA(WizFi210), TBD
(WizFi220)
Receive = 125.0 mA(WizFi210), TBD (WizFi220)
Transmit = 135.0 mA(WizFi210), TBD (WizFi220)
RF Output Power (Typical) 8 ± 1 dBm (WizFi210) TBD (WizFi220)
Security Protocols WEP, WPA/WPA2 – PSK, Enterprise, EAP-FAST, EAP-TLS, EAP-TTLS, PEAP
I/O Interface UART, SPI(*), I2C(*), WAKE, ALARM, GPIOs Power Source 3.3V Dimensions 32 x 23.5 x 3 mm