PROSI
DI
NG
Semi
nar
Nasi
onal
Expo
Tekni
k
El
ektro
2017
&
Banda
Aceh,
18
Oktober
2017
Orgi
ni
zer:
PROSIDING
(ISSN: 2088-9984)
Seminar Nasional dan Expo Teknik Elektro ke-6
SNETE VI
Tahun 2017
http://snete.unsyiah.ac.id/2017/
dengan tema:
“Penguatan dan konstribusi Teknik Elektro dan Komputer di Sektor Energi Baru dan
Terbarukan (EBT) dalam Rangka Meningkatkan Ketahanan Energi Nasional”
Tanggal 18 Oktober 2017
AAC Prof. Dayan Dawood
Banda Aceh - Provinsi Aceh
Tim Editor:
Dr. Suriadi, ST., M.Sc
Mohd. Syaryadhi, ST., M.Sc
Zulhelmi, ST., M.Sc
Aulia Rahman, ST., M.Sc
Diselenggarakan Oleh:
JURUSAN TEKNIK ELEKTRO DAN KOMPUTER
FAKULTAS TEKNIK
PANITIA SEMINAR NASIONAL DAN EXPO TEKNIK ELEKTRO
SNETE VI TAHUN 2017
Penanggung Jawab Dr. Ir. Taufik Saidi, M.Eng.
(Dekan Fakultas Teknik Universitas Syiah Kuala) Wakil Penanggung Jawab Dr. Ir. Rizal Munadi, MM., MT.
(Wakil Dekan I Bidang Akademik Fakultas Teknik) Dr. Zahrul Fuadi, S.T., M.Eng
(Wakil Dekan II Bidang Akademik Fakultas Teknik) Koordinator Dr. Nasaruddin, ST., M.Eng
(Ketua Jurusan Teknik Elektro dan Komputer) Wakil Koordinator Dr. Fitri Arnia, S.T., M.Eng
(Ketua Program Studi Magister Teknik Elektro Unsyiah) Afdhal, S.T., M.Sc
(Koordinator Program Studi Teknik Komputer) Pengarah Prof. Dr. Ir. Yuwaldi Away, M.Sc
Dr. Khairul Munadi, ST., M.Eng Dr. Taufiq A Gani, S.Kom., M.Eng.Sc Dr. Ir. Syahrial, M.Eng
Ir. Agus Adria, M.Sc
Dr. Teuku Yuliar Arief, S.T., M.Kom Ir. Syahrizal, M.T
Ketua Panitia Dr. Suriadi, S.T., M.Sc Wakil Ketua Panitia Zul Syukri, S.T
Sekretaris Aulia Rahman, ST., M.Sc Bendahara M. Irhamsyah, S.T., M.T Koordinator Kesekretariatan Syukriyadin, S.T., M.T Koordinator Publikasi dan Dokumentasi Zulfikar, ST., M.Sc
Hubbul Walidainy, S.T., M.T. Edi Syukriyansyah, ST., MT. Koordinator Program dan Sponsorsip Ahmadiar, ST., M.Sc
Koordinator Logistik dan Tempat Ramdhan Halid Siregar, ST., M.T Roslidar, ST., M.Sc Ali Imron, ST. Syahrul, ST. Yudha Iskandar, ST. Ismahadi Jasmiaty, A.Md Yusmanidar, SP.
KATA PENGANTAR
Alhamdulillah, segala puji bagi Allah Subhanallahu Wata’ala yang telah memberi rahmat dan
hidayahnya kepada kita semua sehingga terlaksananya kembali Seminar Nasional dan Expo Teknik
Elektro yang ke-6 (SNETE-VI) pada tahun 2017 ini. Shalawat dan salam untuk junjungan kita Nabi
besar Muhammad Shalallahu ‘Alaihi Wassalam yang telah membawa kita dari alam jahiliah ke alam
yang berilmu pengetahuan. Seminar ini merupakan ajang tahunan yang diselenggarakan oleh Jurusan
Teknik Elektro dan Komputer Fakultas Teknik Universitas Syiah Kuala dalam rangka mempublikasi
hasil-hasil karya ilmiah dibidang Teknik Elektro dan Komputer dari berbagai perguruan tinggi di
Indonesia. Adapun tema yang diusung pada tahun ini adalah “Penguatan dan Kontribusi Teknik
Elektro dan Komputer Disektor Energi Baru dan Terbarukan (EBT) dalam Rangka Meningkatkan
Ketahanan Energi Nasional”.
Pelaksanaan seminar tahun ini bergabung dengan seminar utama yang diselenggarakan oleh
universitas Syiah Kuala yaitu Annual International Conference (AIC) yang menaungi beberapa seminar
antara lain : SNETE, ICELTICS dan beberapa seminar lainnya baik nasional maupun international.
Pembukaan akan dilakukan secara bersama dan diawali dengan presentasi oleh pembicara kunci dari
dalam negeri dan luar negeri.
Kegiatan SNETE ke 6 tahun 2017 ini akan menampilkan presentasi karya ilmiah dalam bentuk
makalah oleh para akademisi dan peneliti dari berbagai universitas dan lembaga/institusi nasional.
Adapun bidang kajian meliputi disiplin ilmu teknik elektro dan komputer seperti : sistem energi
listrik, teknik telekomunikasi, elektronika dan instrumentasi, sistem kkntrol dan teknik komputer.
Sedangkan kegiatan expo akan diisi oleh berbagai produk teknologi dari karya peneliti dan industri.
Saya selaku ketua panitia SNETE ke 6 tahun 2017, menyampaikan penghargaan yang setinggi
tingginya kepada Rektor Universitas Syiah Kuala (Unsyiah), Dekan Fakultas Teknik Unsyiah,
Magister Teknik Elektro Unsyiah yang telah mendukung terselenggaranya kegiatan ini. Tak lupa
kami ucapkan terimakasih juga kepada P.T. BUANA PRIMA RAYA selaku sponsor, para pembicara
kunci serta peran aktif seluruh anggota panitia yang telah bekerja keras sehingga kegiatan ini dapat
dilaksanakan dengan baik. Yang teristimewa kepada seluruh pemakalah dan peserta yang telah
berhadir dan saya memberi apresiasi yang setinggi-tingginya atas partisipasi dan kontribusinya dalam
mensukseskan kegiatan ilmiah SNETE ke-6 tahun 2017 ini.
Banda Aceh, 18 Oktober 2017
Panitia Pelaksana SNETE VI Tahun 2017
Ketua,
DAFTAR REVIEWER
Prof. Dr. Yuwaldi Away
Universitas Syiah Kuala
Dr. Syafruddin H.S.
Universitas Sumatera Utara
Dr. Surya Hardi
Universitas Sumatera Utara
Dr. Fitri Arnia
Universitas Syiah Kuala
Dr. Ing. Melvi Ulvan
Universitas Lampung
Dr. Ing. Ardian Ulvan
Universitas Lampung
Dr. Syafii
Universitas Andalas
Dr. Muhammad Daud
Universitas Malikussaleh
Dr. Teuku Yuliar Arif
Universitas Syiah Kuala
Dr. Ir. Rizal Munadi
Universitas Syiah Kuala
Dr. Ir. Syahrial
Universitas Syiah Kuala
Dr. Nasaruddin
Universitas Syiah Kuala
Dr. Taufiq A Gani
Universitas Syiah Kuala
Dr. Ira Devi Sara
Universitas Syiah Kuala
Dr. Rakhmad Syafutra Lubis
Universitas Syiah Kuala
KEYNOTE SPEAKERS
(in conjunction with ICELTICS)
Prof. Dr. Hitoshi Kiya
Chair of the Department of Information and Communication Systems, and Associate dean
of the Faculty of System Design, Tokyo Metropolitan University (TMU)
Prof. Ir. Dr. Mohd. Rizal Bin Arshad
Dean of the School of Electrical and Electronic Engineering, Universiti Sains Malaysia
(USM)
Seminar Nasional dan Expo Teknik Elektro ke-6 Tahun 2017
SNETE VI TAHUN 2017
DAFTAR ISI
TEKNIK ENERGI LISTRIK
Penerapan Automatic Voltage Regulator pada Sistem Eksitasi Harmonik Generator
Satu Fasa
Azhar, Muhammad Kamal, dan Subhan
1-7
Analisa Ketidakseimbangan Beban terhadap Arus Netral dan Losses pada Transformator
Distribusi
Feranita Abdul Jalil, Firdaus, Fahrurozi, dan Azriyeni Azhari Zakri
8-12
Desain Sistem Uninterruptible Power Supply DC Berdaya Rendah
M. Rizky Maulanda, Rakhmad Syafutra Lubis, dan Hafidh Hasan
13-16
Analisis Potensi Tenaga Angin Menggunakan Metode Weibull di Waduk Keliling Aceh
Besar
Husaini, Suriadi, dan Syahrizal
17-21
Studi Analisis Kompensasi Daya Reaktif dengan Motor Sinkron dan Kapasitor Bank
pada PT. PDAM Tirta Daroy
Muhammad Rizki, Rakhmad Syafutra Lubis, dan Mahdi Syukri
22-28
Perbaikan Harmonisa pada Jaringan Distribusi PLN 20KV Banda Aceh dengan Filter
Pasif
Ridhatullah, Rakhmad Syafutra Lubis, dan Hafidh Hasan
29-34
Model Perancangan Pembangkit Hibrid Tenaga Surya-Diesel dengan Aplikasi Homer
Pro V3.9.1
Matius Sau dan Hestikah Eirene Patoding
35-42
Pemodelan Pembangkit Hibrid Energi Bayu dengan Energi Surya
Eodia Tasik Sedan Lobo dan Rombe
43-48
PLTA Siram: Pembangkit Hydro Berbasis Gravitasi Bumi untuk Menggerakkan Pompa
Air Perumahan
Noprida Sari, Zikra Latasya, Mitra Waliadin, Hendrik Leo, Muhammad Rizky Dimas Saputra, dan Ramdhan Halid Siregar
Pemodelan Estimasi Lokasi Gangguan pada Sistem Transmisi Adaptasi Metode ANFIS
Azriyenni Azhari Zakri, Feranita Abdul Jalil, dan Iswadi Hasyim Rosma
53-58
Harmonisa pada Peralatan X-Ray Mobile 100 mA
Partaonan Harahap
59-65
Analisis Potensi Tenaga Angin Menggunakan Metode Distribusi Weibull di Kawasan
Banda Aceh
Ilyas, Suriadi, dan Mansur Gapy
66-68
TEKNIK KOMPUTER
Metode Deteksi Kanker Payudara dengan Citra Thermal
Mentari Bella Al Rasyid, Yunidar, Khairul Munadi, dan Fitri Arnia
69-73
Penerapan Logika Fuzzy pada Sun Tracker Dual Axis Berbasis Sensor Tetrahedron
Geometri
Yuwaldi Away, Suriadi, Aulia Rahman, Teuku Reza Auliandra Isma, dan Muhamad Firdaus
74-80
Penerapan Wireless Sensor Network Berbasis Internet of Things pada Kandang Ayam
untuk Memantau dan Mengendalikan Operasional Peternakan Ayam
Teuku Ridha Muhammad Saputra, Mohd. Syaryadhi, dan Rahmad Dawood
81-88
Rancang Bangun Sistem Informasi Tugas Akhir di Jurusan Teknik Elektro dan
Komputer Universitas Syiah Kuala
Ryan Fahari, Zulfikar, dan Rahmad Dawood
89-96
Estimasi Panjang dan Lebar Ikan Berdasarkan Visual Capture
Raihan Islamadina, Nuriza Pramita, Fitri Arnia, dan Khairul Munadi
97-101
Dampak Sosial Internet of Things
Ernita Dewi Meutia
102-106
Perbandingan Metode Penekanan Noise Lokal dan Non-Lokal untuk Binerisasi
Dokumen Jawi Kuno
Khairun Saddami, Yuwaldi Away, Khairul Munadi, dan Fitri Arnia
107-112
Studi Literatur–Deteksi Kanker Payudara Menggunakan Citra Termal
I. Pendahuluan
Energi matahari merupakan energi terbarukan yang juga menjadi sumber dari sebagian besar bentuk energi lain di muka bumi. Jumlah energinya yang besar serta berlimpah menjadikan energi matahari sangat berpotensi untuk dimanfaatkan. Namun karena keterbatasan teknologi saat ini, hanya sedikit dari energi tersebut yang dapat diekstrak. Untuk kasus photovoltaic, efisiensi tertinggi secara teoritis adalah 55% [4] walaupun dalam prakteknya dapat relatif jauh lebih rendah.
Untuk meningkatkan ekstrak energi surya digunakan sun tracker. Sun tracker digunakan untuk memaksimalkan energi yang dapat diterima oleh panel surya dengan cara menjaga posisi panel surya agar selalu tegak lurus terhadap
sumber cahaya. Secara matematis maupun eksperimen, sun tracker mampu menambah jumlah energi yang diterima hingga sebesar 60 % [6,7,8]. Berbagai sistem sun tracker telah dikembangkan oleh banyak peneliti baik menggunakan algoritma khusus mumpun tipe sensor yang berbeda.
Penelitian ini merupakan lanjutan penelitian dual-axis sun tracker sensor based on tetrahedron geometry oleh Yuwaldi Away dan Muhamad Ikhsan pada awal tahun 2017 [1]. Penelitian ini termotivasi karena kebutuhan energi dunia yang terus meningkat serta intervensi kuat dari protokol Kyoto [1, 2] mengakibatkan sumber energi terbarukan menjadi pilihan di seluruh dunia, terbukti bahwa energi terbarukan memiliki tingkat pertumbuhan yang paling cepat dibandingkan sumber energi lainnya.
Penerapan Logika Fuzzy pada Sun Tracker Dual
Axis Berbasis Sensor Tetrahedron Geometri
Yuwaldi Away1, Suriadi1, Aulia Rahman2, Teuku Reza Auliandra Isma2, dan Muhamad Firdaus2 1Program Magister Teknik Elektro, Universitas Syiah Kuala
2Jurusan Teknik Elektro dan Komputer, Universitas Syiah Kuala
Jl. Tgk. Syech Abdurrauf No.7, Darussalam, Banda Aceh 23111 e-mail: [email protected]
Abstrak—Potensi energi surya yang berlimpah di kawasan khatulistiwa, seperti negara Indonesia, hingga kini belum
dapat secara maksimal diserap untuk dimanfaatkan sebagai energi terbarukan. Pada penelitian ini diusulkan konsep baru suatu sun tracker dua sumbu berbasis geometri tetrahedron menggunakan metode logika fuzzy agar dapat menentukan secara lebih tepat posisi matahari atau intensitas cahaya terkuat (ketika ada gangguan awan). Hasil sementara penelitian ini adalah: 1) suatu desain sensor berbasis LDR dengan konstruksi geometri tetrahedron, 2) sistem data logger parameter panel surya dapat merekam secara terus-menerus kondisi panel surya seperti intensitas cahaya, posisi matahari, posisi motor penggerak, arus, tegangan dan daya, 3) konstruksi tracker panel surya dua sumbu, 4) hasil simulasi logika fuzzy untuk menentukan nilai input dan output penggerak sun tracker. Pada akhir penelitian ini akan dibangun konstruksi solar panel dua sumbu yang bertujuan untuk menguji algoritma kendali yang telah diperbaiki dan mengumpulkan data aktual cahaya matahari, dan membandingkan hasil energi surya yang diekstrak dari algoritma sun tracker baseline dan algoritma perbaikan yang diusulkan dalam penelitian ini. Kata kunci: : data logger, logika fuzzy, multichannel, panel surya, Atmega 328P
Abstract—The potential energy of solar in equatorial regions is very much, such as the Indonesia, nowday, can’t to
be maximally absorbed to be utilized as renewable energy. In this research, a new concept of a two-axis sun tracker based on tetrahedron geometry using fuzzy logic method in order to determine more precisely the position of the sun or the strongest intensity of light. The temporary results of this research are: 1) a design of sun tracker sensor based on LDR with geomentry tetrahedron construction, 2) data logger solar panel parameters can continuously record the condition of solar panels such as light intensity, sun position, position of motors, current, voltage and power, 3) dual-axis solar panel construction, 4) fuzzy logic simulation to determine the input and output value for the sun tracker. The final result of this research will be constructed dual-axis solar panel construction aimed at testing the improved control algorithm and collecting actual solar data, and comparing the results of solar energy extracted from the baseline sun tracker algorithm and the improvement algorithm proposed in this study.
Keywords: data logger, fuzzy logic, multichannel, solar panel, Atmega 328P
II. dasar TeorI
A. Sensor Intensitas Cahaya
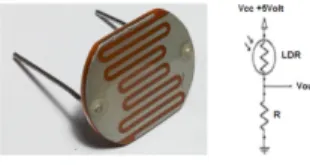
LDR merupakan resistor yang besar resistansinya tergantung terhadap intensitas cahaya yang menyinari permukaannya. Prinsip kerja LDR, makin kuat intensitas cahaya maka makin kecil nilai tahanannya dan makin lemah intensitas cahaya maka makin besar nilai tahanannya. Komponen LDR dibuat dari Cadmium Sulphide (CdS). Gambar 1 berikut merupakan rangkaian sederhana dari sensor intensitas cahaya. Gambar ini juga merupakan rangkaian pembagi tegangan. Tegangan Vout, maka dapat dirumuskan sebagai berikut:
(1)
Vout R Vcc
LDRR =
Dari persamaan di atas dapat dilihat bahwa nilai LDR jika menerima cahaya maka nilai keluaran Vout menjadi besar, dan begitu juga sebaliknya jika tidak ada cahaya yang diterima LDR maka nilai Vout menjadi kecil.
Sensor cahaya yang digunakan adalah Light Dependent Resistor (LDR). Hambatan Light Dependent Resistor (LDR) yang di hubungan pada analog Atmega328p akan memberikan pembacaan bervariasi antara 0 dan 1023, sesuai dengan jumlah cahaya yang jatuh di atasnya, berupa nilai hambatan yang belum deskriptif. Perlu beberapa teknik pembacaan yang akurat untuk mendiskripsikan pembacaannya. Hubungan antara RL resistensi dan intensitas cahaya Lux untuk LDR biasanya adalah :
500 ( )
RL k 2
Lux
= Ω
Jika LDR dihubungkan ke tegangan 5 V melalui resistor 10KΩ, maka tegangannya :
(
)
0 5 . (3) 10 L L R V R = +Karena nilai yang dihasilkan LDR antara 0 dan 1023, setiap langkah dapat didefinisikan oleh 5/1024 = 0,0048828125. Sehingga dapat diperoleh intensitas cahaya yaitu :
0 2500 (4 500 10 ) V Lux= −
(
0.0048828125 5002500)
5 10 ( ) AnalogRead x Lux − = B. Logika FuzzyPerbedaan antara logika digital dan logika Fuzzy adalah logika digital hanya menggunakan nilai 0 dan 1 sebagai acuan untuk mengekspresikan sesuatu sedangkan logika Fuzzy dapat menggunakan nilai diantara 0 dan 1 untuk menentukan nilai keanggotaan[3].
1. Himpunan Fuzzy: Himpunan Fuzzy merupakan rentang nilai-nilai, yang mana nilai tersebut memiliki derajat keanggotaan antara 0 sampai 1. Suatu himpunan Fuzzy à dalam semesta U dinyatakan dengan fungsi keanggotaan μà , yang nilainya berada dalam interval [0,1], dapat dinyatakan dengan :
μà : U → [0,1]. (6)
Himpunan Fuzzy A dalam semesta U dinyatakan sebagai sekumpulan pasangan elemen u (u anggota U) dan derajat keanggotaannya dinyatakan sebagai berikut:
( )
{( , | } (7)
à = u à uµ u U∈
Cara-cara untuk menotasikan himpunan Fuzzy adalah sebagai berikut:
• Himpunan Fuzzy ditulis sebagai pasangan berurutan, dengan elemen pertama menunjukkan nama elemen dan elemen kedua menunjukkan nilai keanggotaannya. • Apabila semesta X adalah himpunan yang diskret,
maka himpunan Fuzzy à dapat dinotasikan sebagai:
( )
1 / 1( )
2 / 2( )
/ (8) Ã=µÃ x x +µÃ x x + …+µÃ xn xn atau( )
1 ( n / 9) i à µÃ xi xi = =∑
• Apabila semesta X adalah himpunan yang kontinu maka himpunan Fuzzy à dapat dinotasikan sebagai:
( )
/ (10)Ã =
∫
xµÃ x xTanda ∫ bukan berarti integral, tapi memiliki arti bahwa keseluruhan unsur-unsur titik x ∈ X bersama dengan fungsi keanggotaan μÃ(x) dalam himpunan Fuzzy Ã. Tanda / juga bukan berarti pembagian, tetapi melambangkan hubungan antara satu elemen x pada himpunan Fuzzy à dengan fungsi keanggotaannya[1].
2. Fungsi Keanggotaan: Fungsi keanggotaan (membership function) adalah suatu kurva yang menunjukkan pemetaan titik-titik input data ke dalam nilai keanggotaan (derajat keanggotaan) yang memiliki interval antara 0 sampai 1. Ada beberapa fungsi yang bisa digunakan yaitu :
• Representasi Linear Naik: Kenaikan himpunan dimu-lai dari nidimu-lai domain yang memiliki nidimu-lai keanggotaan rendah atau nol (0) bergerak ke kanan menuju ke nilai domain yang memiliki derajat keanggotaan yang lebih tinggi seperti yang terlihat pada Gambar 2.
Fungsi keanggotaan:
( ) (
)
(
)
0 ; (11) ; x a x a x a x b b a µ ≤ − = < ≤ − Keterangan :a = nilai domain yang mempunyai derajat keanggotan nol b = nilai domain yang mempunyai derajat keanggotan satu x = nilai input yang akan diubah kedalam bilangan Fuzzy • Representasi Linear Turun: Garis linear yang dimulai
dari nilai domain dengan derajat keanggotaan terting-gi atau satu (1), kemudian bergerak turun ke nilai do-main yang memiliki derajat keanggotaan lebih rendah (Gambar 3). Fungsi keanggotaan :
(
)
(
)
; ( ) 0 ; (12) b x a x b x b a x b µ − ≤ < = − ≥ Keterangan :a = nilai domain yang mempunyai derajat keanggotan satu b = nilai domain yang mempunyai derajat keanggotan nol x = nilai input yang akan diubah kedalam bilangan Fuzzy • Representasi Kurva Segitiga: Representasi kurva
segi-tiga, pada dasarnya adalah gabungan antara dua repre-sentasi linear (reprerepre-sentasi linear naik dan reprerepre-sentasi
linear turun), seperti ditunjukkan pada Gambar 4. Fungsi keanggotaan :
( )
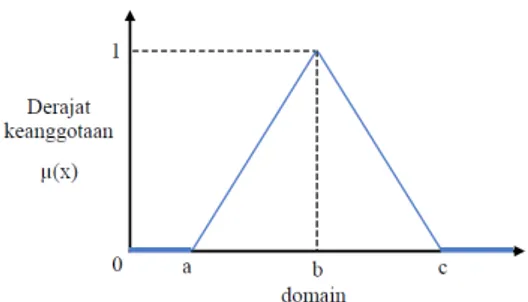
0 ; ; ; (13) x a dan x c x a x a x b b a c x b x c c b µ ≤ ≥ − = − < ≤ − < < − Keterangan :a = nilai domain terkecil memiliki derajat keanggotan nol b = nilai domain memiliki derajat keanggotan satu c = nilai domain terbesar memiliki derajat keanggotaan nol x = nilai input yang akan diubah kedalam bilangan Fuzzy • Representasi Kurva Trapesium: Representasi kurva
trapesium pada dasarnya seperti bentuk kurva segiti-ga, hanya saja ada beberapa titik yang memiliki nilai keanggotaan 1 (satu), seperti pada Gambar 5.
Fungsi keanggotaan :
( )
0 ; ; 1 ; (14 ; ) x a atau x d x a a x b b a x b x c d x c x d d c µ ≤ ≥ − < ≤ − = < ≤ − < < − Keterangan :a = nilai domain terkecil dengan derajat keanggotan nol b = nilai domain terkecil dengan derajat keanggotan satu c = nilai domain terbesar dengan derajat keanggotaan satu d = nilai domain terbesar dengan derajat keanggotaan nol
Gambar 2. Representasi Linear Naik
Gambar 3. Representasi Linear Turun
Gambar 4. Representasi Kurva Segitiga
x = nilai input yang akan diubah ke dalam bilangan Fuzzy 3. Metode Mamdani: Metode Mamdani bekerja
berdasarkan aturan-aturan linguistik. Sistem inferensi Fuzzy Metode Mamdani juga dikenal dengan nama metode Max-Min. Untuk mendapatkan output, diperlukan langkah-langkah sebagai berikut:
• Pembentukan himpunan fuzzy: Menentukan semua variabel yang terkait dalam proses yang akan ditentukan. Untuk masing-masing variabel input, tentukan suatu fungsi fuzzifikasi yang sesuai.
• Aplikasi fungsi implikasi: Menyusun basis aturan, yaitu aturan-aturan berupa implikasi Fuzzy yang menyatakan relasi antara variabel input dengan variabel output. • Komposisi aturan: Apabila sistem terdiri dari beberapa
aturan, maka inferensi diperoleh dari kumpulan dan kolerasi antar aturan. Adapun metode-metode yang digunakan dalam melakukan inferensi sistem Fuzzy yaitu Metode Max (Maximum) dan Metode Additive (Sum)
• Defuzzifikasi: Input dari proses penegasan (defuzzifikasi) adalah suatu himpunan Fuzzy yang diperoleh dari komposisi aturan-aturan Fuzzy, sedangkan output yang dihasilkan merupakan suatu bilangan real yang tegas.
III. MeTode PenelITIan
A. Prosedur penelitian
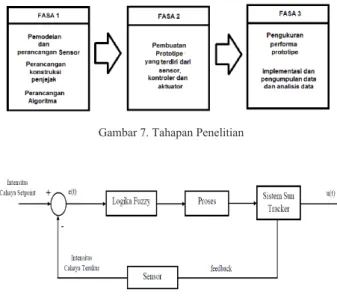
Dalam penelitian ini, yang menjadi subjek adalah sistem kendali berbasis mikrokontroler dan algoritma serta beberapa periperal lainnya, Sedangkan menjadi objek penelitian ini adalah variabel output (y) yaitu arah solar modul dan variable input (x) adalah posisi matahari (x1), intensitas cahaya matahari (x2) dan posisi motor penggerak (3). Secara ringkas diilustrasikan pada Gambar 6. Penelitian ini dijalankan dengan 3 tahapan yaitu fasa pertama perancangan sensor, konstruksi penjejak, fasa kedua pembuatan prototipe dan pemrograman, dan fasa ketiga adalah pengujian dan implementasi. Tahapan penelitian ditunjukkan pada Gambar 7.
Penelitian ini diperlukan alat dan bahan yang digunakan sebagai komponen sun tracker. Adapun alat dan bahan yang digunakan dapat dilihat pada Tabel 1.
B. Sistem Kendali
Sistem kendali sun tracker ini bergerak dengan input yang diterima mikrokontroler Atmega328p dari 3 sensor
LDR. Adapun diagram sistem kendali ini dapat dilihat pada Gambar 8.
Gambar 8 menjelaskan bahwa input konroler yang digunakan sebagai setpoint adalah LDR0 (LDR Referensi) dengan intensitas cahaya 360-512, sedangkan LDR1 dan LDR2 digunakan sebagai input pembanding. Kemudian input-input ini diproses menggunakan logika fuzzy. output dari proses ini yaitu sistem Sun Tracker yang terdiri dari pergerakan servo, perubahan intensitas cahaya dan perubahan posisi tracker. Feedback dari sistem Sun Tracker ini yaitu sensor LDR yang bertujuan untuk membandingkan nilai intensitas cahaya output (terbaru) dengan intensitas cahaya setpoint.
C. Menentukan faktor-faktor logika fuzzy
Kontroler sun tracker ini memiliki tiga input LDR yaitu LDR0, LDR1 dan LDR2, yang diletakkan dengan posisi yang berbeda arah (Bentuk Geometri Tetrahedron). Tiga input LDR ini mempunyai nilai membership yang sama yaitu ditunjukkan pada Gambar 13.
Gambar 9 menunjukkan bahwa rentang nilai dari tiga LDR yaitu 0 – 512 dan memiliki dua nilai membership yaitu NonRef dan Ref. Membership NonRef memiliki rentang nilai antara -10 sampai 390, sedangkan Ref memiliki rentang nilai antara 360 sampai 570.
Kontroler sun tracker ini juga dilengkapi dengan dua
Gambar 7. Tahapan Penelitian Tabel 1. Bahan yang digunakan untuk penelitian No. Alat dan Bahan Jumlah
1. Arduino Uno R3 1 unit 2. Sensor LDR 3 unit 3. Motor Servo 2 unit 4. Modul RTC 1 unit 5. Baterai Panasonic 7.2 maH 1 unit 6. Beterai Lippo 7500 maH 1 unit
motor servo yang digunakan sebagai output untuk bergerak ke arah vertikal (sumbu x) dan bergerak ke arah horizontal (sumbu y). Output dari dua motor servo ini juga memiliki nilai membership yang sama, seperti yang terlihat pada Gambar 10. Gambar tersebut menunjukkan bahwa rentang nilai untuk membership output yaitu dari 0 sampai 360 dan memiliki dua nilai membership yaitu diam dan bergerak. Membership untuk diam adalah 0, sedangkan membership bergerak memiliki rentang nilai 1 sampai dengan 360. Aturan-aturan yang digunakan untuk menghubungkan antara input dan output adalah sebagai berikut.
• Jika LDR0 adalah Ref, LDR1 adalah NonRef dan LDR2 adalah NonRef, maka servo X dan servo Y akan bergerak;
• Jika LDR0 adalah Ref, LDR1 adalah NonRef dan LDR2 adalah Ref, maka servo X akan bergerak dan servo Y akan diam;
• Jika LDR0 adalah Ref, LDR1 adalah Ref dan LDR2 adalah NonRef, maka servo X akan diam dan servo Y akan bergerak;
• Jika LDR0, LDR1 dan LDR2 adalah Ref, maka servo X dan servo Y akan diam;
• Jika LDR0, LDR1 dan LDR2 adalah NonRef, maka servo X dan Servo Y akan bergerak;
• Jika LDR0 adalah NonRef, LDR1 adalah NonRef dan LDR2 adalah Ref, maka servo X akan bergerak dan servo Y akan diam;
• Jika LDR0 adalah NonRef, LDR1 adalah Ref dan LDR2 adalah NonRef, maka servo X akan diam dan servo Y akan bergerak;
• Jika LDR0 adalah NonRef, LDR1 adalah Ref dan LDR2 adalah Ref, maka servo X dan servo Y akan bergerak.
D. Desain menggunakan Matlab
Setelah menentukan nilai-nilai membership, tahap berikutnya adalah memasukkan nilai-nilai tersebut ke dalam fungsi FIS (Fuzzy Inference System) pada Matlab. Berikut adalah gambar pemodelan yang dilakukan pada
aplikasi Matlab.
Pemodelan simulasi yang dilakukan pada Matlab ini bertujuan untuk mendapatkan hasil dari proses fuzzifikasi sehingga dapat mengetahui nilai output yang dihasilkan dari input yang berbeda.
Gambar 11 menunjukkan desain Fuzzy yang akan disimulasikan yang terdiri dari tiga input yaitu LDR0, LDR1, LDR2 dan menghasilkan dua output yaitu ServoX dan ServoY. Metode fuzzy yang digunakan yaitu metode Mamdani dan proses defuzzifikasi menggunakan metode centroid.
IV. hasIldan PeMbahasan
A. Data pengujian
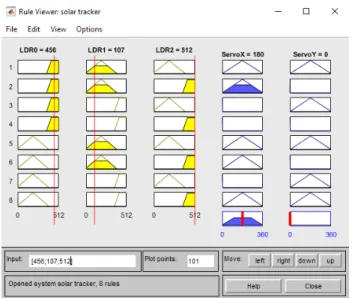
Data yang dihasilkan dari simulasi yang dilakukan oleh FIS (Fuzzy Inference System) pada Matlab. Gambar 12 menunjukkan bahwa ketika nilai LDR0, LDR1, LDR2 berada pada rentang nilai membership Ref (Referensi), maka output akan memberikan nilai nol pada kedua motor servo, yang menunjukkan bahwa kontroler sun tracker mengarah pada matahari.
Gambar 13 menunjukkan bahwa ketika nilai ketiga LDR dibawah nilai referensi (NonRef), maka akan memberikan output yaitu perintah untuk bergerak pada kedua motor servo.
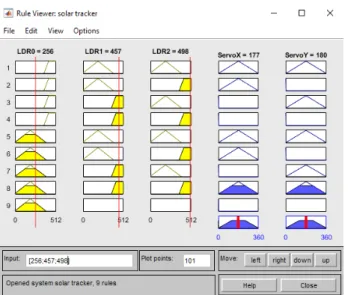
Gambar 14 menunjukkan bahwa ketika nilai LDR0 dan LDR1 mempunyai nilai referensi sedangkan nilai LDR2 dibawah nilai referensi (NonRef), maka output yang dihasilkan yaitu motor servo arah vertikal (ServoX) akan berhenti dan motor servo arah horizontal (ServoY) akan bergerak untuk mencari nilai referensi.
Gambar 15 menunjukkan bahwa ketika nilai LDR0 dan LDR2 mempunyai nilai referensi sedangkan nilai LDR1 dibawah nilai referensi (NonRef), maka output
Gambar 9. Membership Input LDR
Gambar 10 Membership Output Motor Servo
yang dihasilkan yaitu motor servo arah vertikal (ServoX) akan bergerak untuk mencari nilai referensi dan motor
servo arah horizontal (ServoY) akan berhenti.
Gambar 16 menunjukkan bahwa ketika nilai LDR0 (yang digunakan sebagai referensi dari ketiga sensor LDR) mempunyai nilai di bawah nilai referensi cahaya, sedangkan nilai LDR1 dan LDR2 memiliki nilai referensi cahaya, maka output yang dihasilkan yaitu kedua motor servo bergerak untuk menemukan nilai referensi LDR0.
Simulasi sun tracker berbasis logika Fuzzy dengan Fuzzy Inference System (FIS) pada Matlab menggunakan nilai random dapat dilihat pada Tabel 2.
Berdasarkan Tabel 2 dapat dilihat bahwa kedua motor servo akan bergerak ketika LDR0 yang digunakan sebagai sensor referensi (acuan) tidak mencapai intensitas cahaya yang ditetapkan sebagai nilai referensi atau LDR1 dan LDR2 tidak mencapai intensitas cahaya referensi.
Gambar 12. Kondisi Semua Input LDR pada Nilai Referensi
Gambar 14. Kondisi Ketika LDR0 dan LDR1 pada Nilai Referensi Sedangkan LDR2 Non-Referensi
Gambar 13. Kondisi Semua Input LDR pada nilai Bukan Referensi
Gambar 15 Kondisi Ketika LDR0 dan LDR2 pada Nilai Referensi Sedangkan LDR1 Non-Referensi
Tabel 2. Simulasi Fuzzy pada Matlab Menggunakan Nilai Random
No. Input Output LDR0 LDR1 LDR2 Servo X Servo Y 1. 102 154 301 180 180 2. 404 187 225 180 180 3. 438 501 015 0 180 4. 512 171 496 180 0 5. 402 488 504 0 0 6. 325 404 397 180 180 7. 178 445 038 0 180 8. 109 98 398 180 0
V. KesIMPulan
Berdasarkan hasil simulasi yang telah didapat menunjukkan bahwa input dari tiga LDR dapat mempengaruhi motor servo untuk menentukan arah sasaran posisi cahaya. LDR0 digunakan sebagai acuan (sensor referensi) untuk membandingkan nilai dari LDR1 dan LDR2 berdasarkan nilai membership yang ditentukan pada metode logika Fuzzy.
ucaPan TerIMa KasIh
Penelitian ini dibiayai oleh Universitas Syiah Kuala, Kementerian Riset, Teknologi dan Pendidikan Tinggi RI, Sesuai dengan Surat Perjanjan Penugasan Pelaksanaan Penelitian Profesor Tahun Anggaran 2017 Nomor: 1442/ UN11/SP/PNBP/ 2017 Tanggal 18 Mei 2017. Terima kasih dan Penghargaan yang tinggi kepada Rektor dan
Ketua LPPM Unsyiah, serta para peneliti dan pembantu peneliti pada PUSMATIK diantaranya adalah Muhammad Ikhsan, M. Ilham, Ikhramuddin, dan Darmawan.
referensI
[1] Away Y, M. Ikhsan Dual-Axis Sun Tracker Sensor Based on Tetrahedron Geometry, Elsevier: Automation in Construction, 73 (2017) 175–183
[2] Bandgap Engineering in High-Efficiency Multijunction Concentrator Cells.International Conference on Solar Concentrators for the Generation of Electricity or Hydrogen, 1-5 May 2005, Scottsdale, Arizona
[3] Firdaus M, Pengendalian Robot Mobil Otonom P e m o t o n g Rumput Menggunakan Metode Logika Fuzzy, Universitas Syiah Kuala, Aceh, 2017.
[4] T. Soe., N. Afifi., “Design of an Online Data Logging System for Hybrid Renewable Energy System,” The 2nd Joint International Conference on SEE, Bangkok, Thailand, 2006.
[5] Ira Devi Sara, “Analisis Potensi Kondisi Suhu dan Radiasi Sinar Matahari di Kota Banda Aceh untuk Pengembangan Pembangkit Listrik Tenaga Surya,” SNETE, 2014, pp. 142-145.
[6] M. Ikhsan., Yuwaldi A., “Tenik Reduksi Energi Pada Perancangan data logger parameter matahari,” Unsyiah, Aceh, Indonesia, 2014.
[7] M. Fuentes, M.Vivar, J.M.Burgos, J.Aguilera, J . A . V a c a s , “Design of anaccurate, lowcost autonomous data logger for PV system monitoring using Arduino™ that complies with IEC standards”, Solar Energy Materials & Solar Cells, 130, 2014, pp: 529–543.
[8] Agus Purwadi, Yanuarsyah Haroen., dkk., “Prototype Development of a Low Cost Data Logger for PV Based LED Street Lighting System,” in International Conference on Electrical Engineering and Informatics, IEEE., 2011.
[9] Yansen., “Data Logger Parameter Panel Surya,” Tugas Akhir, Fakultas Elektronika dan Komputer, Universitas Kristen Satya Wacana, Salatiga, Indonesia, 2013.
[10] Paulescu, M., Paulescu, E., Gravila, P., Badescu, V., “Weather Modeling and Forecasting on PV System Operation,” Springer, Hardcover, XVIII, 355 p. 166 illus.,2013.
Gambar 16 Kondisi Ketika LDR1 dan LDR2 pada Nilai Referensi Sedangkan LDR0 Non-Referensi