BAB III
PERANCANGAN ALAT
Perancangan alat secara garis besar dibagi menjadi dua bagian yaitu : 1. Perancangan perangkat keras (hardware) meliputi perancangan desain
mekanik, bagan alur kerja alat, diagram blok, wiring diagram, konfigurasi i/o yang digunakan.
2. Perancangan program (software) meliputi penjelasan flowchart proses kerja alat, pemrograman LabView.
3.1 PERANCANGAN PRANGKAT KERAS ( HARDWARE ) 3.1.1 Desain Mekanik
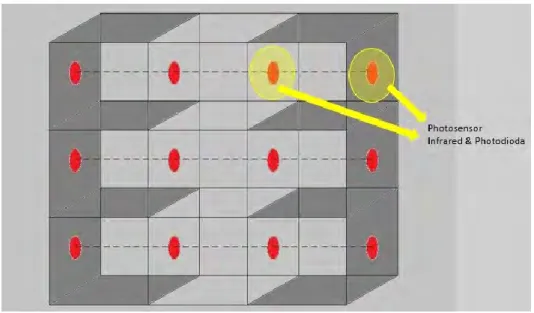
Perancangan tempat untuk alat penyimpanan dan pengambilan barang otomatis ini menggunakan rak master yang terdiri dari tiga row dan tiga kolom.
Perancangan desain mekanik untuk rak master dapat dilihat pada gambar 3.1 berikut :
Gambar 3.1 Perancangan Rak Master
Rak master terdiri dari sembilan kotak penyimpanan yang terdiri dari tiga row dan tiga kolom. Pada perancangan ini, masing-masing kotak pada rak akan dipasang fotosensor sebagai pendeteksi keberadaan barang.
3.1.2 Bagan Alur Kerja Alat
Bagan alur kerja alat penyimpanan dan pengambilan otomatis ini, terdiri dari motor stepper (Travel Motor Forward/Reverse), Motor Stepper (Lifter Motor Up/Down), dan motor dc (Fork Motor Advance/Return). Bagan alur kerja mesin dapat diilustrasikan seperti gambar di bawah ini :
Gambar 3.2 Bagan Alur Kerja Alat
Aktuator penggerak yang digunakan adalah motor stepper dan motor dc.
Masing-masing motor dapat bergerak otomatis sesuai input. Pergerakkan motor stepper (Travel Motor Forward/Reverse) dan motor stepper (Lifter Motor Up/Down) dapat berintepolasi berdasarkan rak yang dituju, dan motor dc (Fork Motor Advance/Return) akan bergerak maju mundur saat proses penyimpanan atau pengambilan barang.
3.1.3 Diagram Blok Sistem
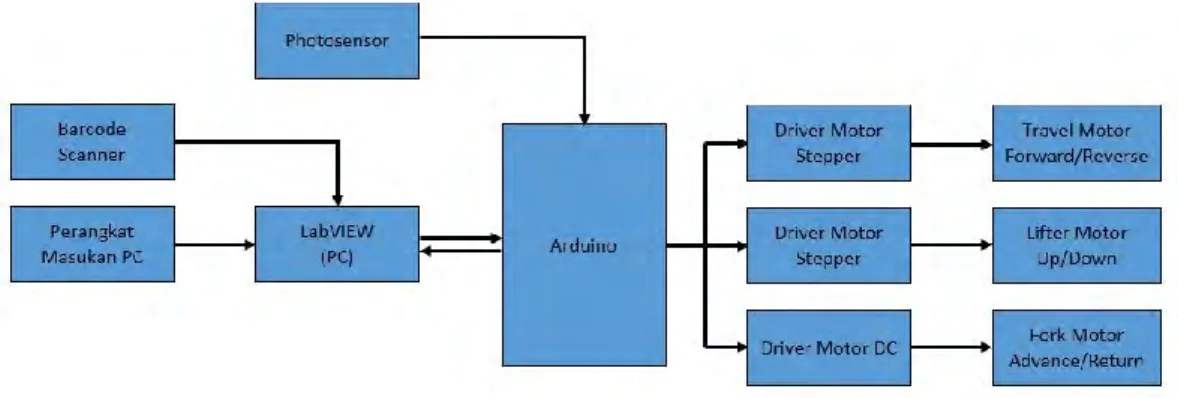
Diagram blok sistem secara keseluruhan dapat dilihat pada gambar 3.3 :
Gambar 3.3 Diagram Blok (terlampir)
Penjelasan secara umum perancangan alat ini sebagai berikut : 1. Input data menggunakan barcode scanner.
2. Interface pengolah data (controller) menggunakan LabVIEW.
3. Hardware I/O menggunakan arduino uno.
4. Sensor pendeteksi barang menggunakan fotosensor.
5. Aktuator penggerak menggunakan motor stepper dan motor dc.
3.1.4 Wiring Diagram
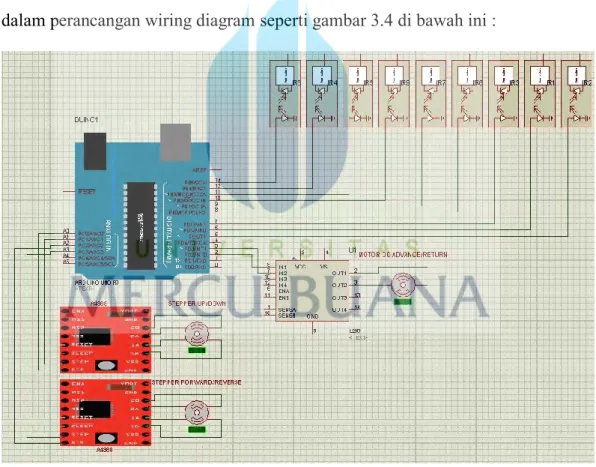
Dari penjelasan diagram blok di atas, maka penulis menerjemahkan dalam perancangan wiring diagram seperti gambar 3.4 di bawah ini :
Gambar 3.4 Wiring Diagram (terlampir)
Penjelasan konfigurasi I/O pada pin Arduino Uno sebagai berikut : 1. Pin 2 : Motor DC ( Fork Motor ) advance.
2. Pin 3 : Motor DC ( Fork Motor ) return.
3. Pin 4 : N/A.
4. Pin 5 : Fotosensor rak 2.
5. Pin 6 : Fotosensor rak 1.
6. Pin 7 : Fotosensor rak 3.
7. Pin 8 : Fotosensor rak 8.
8. Pin 9 : Fotosensor rak 7.
9. Pin 10 : Fotosensor rak 9.
10. Pin 11 : Fotosensor rak 5.
11. Pin 12 : Fotosensor rak 4.
12. Pin 13 : Fotosensor rak 6.
13. Pin A0 : Motor Stepper ( Lifter Motor ) direction (digital).
14. Pin A1 : Motor Stepper ( Lifter Motor ) step (digital).
15. Pin A2 : Motor Stepper ( Travel Motor ) direction (digital).
16. Pin A3 : Motor Stepper ( Travel Motor ) step (digital).
3.2 PERANCANGAN PROGRAM ( SOFTWARE )
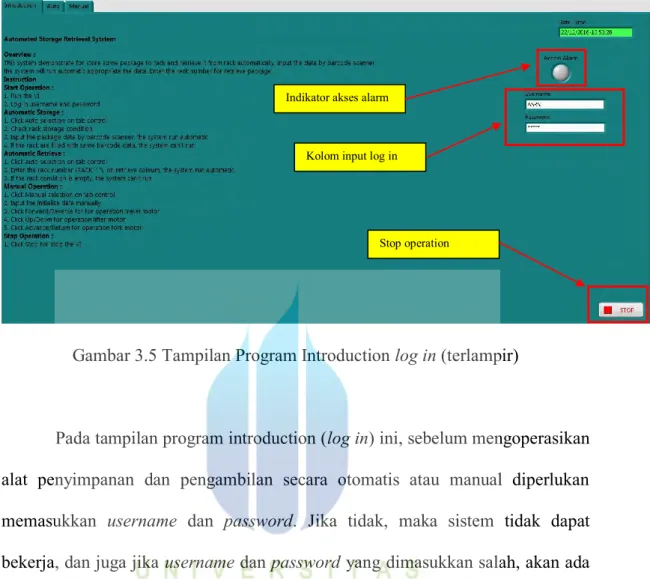
Program rancang bangun penyimpanan dan pengambilan barang otomatis ini menggunakan software pemrograman LabVIEW. Penulis merancang menjadi tiga program, yaitu program introduction (login), program kendali auto (storage dan retrieve) dan program kendali manual. Tampilan program introduction (login) dapat dilihat pada gambar 3.5 berikut :
Gambar 3.5 Tampilan Program Introduction log in (terlampir)
Pada tampilan program introduction (log in) ini, sebelum mengoperasikan alat penyimpanan dan pengambilan secara otomatis atau manual diperlukan memasukkan username dan password. Jika tidak, maka sistem tidak dapat bekerja, dan juga jika username dan password yang dimasukkan salah, akan ada indikator akses alarm. Program ini berfungsi, sebagai proteksi bahwa alat ini hanya dapat dioperasikan oleh orang yang berkepentingan saja.
Jika tidak diproteksi maka dikhawatirkan akan ada orang yang tidak berkepentingan mengoperasikan alat ini. Hal ini merupakan sistem standar yang digunakan oleh maker-maker mesin untuk memproteksi mesin dari abnormality operation. Untuk detail username dan password akan dijelaskan pada saat pengujian alat penyimpanan dan pengambilan barang otomatis ini.
Kolom input log in Indikator akses alarm
Stop operation
3.2.1 Program Auto Storage
Tampilan program Auto Storage dijelaskan pada gambar 3.6 di bawah :
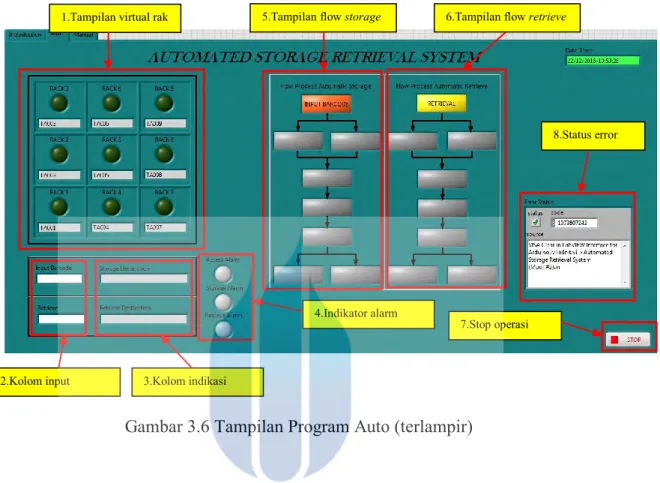
Gambar 3.6 Tampilan Program Auto (terlampir)
Tampilan (Graphical User Interface / GUI) pada front panel kendali program auto dibagi menjadi dua kendali sistem, yaitu penyimpanan (storage) dan pengambilan (retrieve). Pada sub-subbab ini penulis akan menjelaskan program kendali auto storage. Penjelasan detail front panel kendali auto sebagai berikut :
1. Tampilan virtual rak : Tampilan kondisi aktual rak (isi/kosong) dengan indikator lampu dan data.
2. Kolom input
Input Barcode : Kolom input barcode scanner untuk proses penyimpanan barang.
7.Stop operasi 1.Tampilan virtual rak
4.Indikator alarm
5.Tampilan flow storage 6.Tampilan flow retrieve
8.Status error
3.Kolom indikasi 2.Kolom input
Retrieve : Kolom input data (RACK “ “) untuk proses pengambilan barang.
3. Kolom indikasi
Storage Destination : Tampilan indikasi rak yang dituju dan indikasi alarm input proses untuk penyimpanan barang.
Retrieve Destination : Tampilan indikasi rak yang dituju dan indikasi alarm input untuk proses pengambilan.
4. Indikator alarm
Access Alarm : Tampilan indikator alarm kesalahan log in.
Storage Alarm : Tampilan indikator alarm untuk proses penyimpanan.
Retrieve Alarm : Tampilan indikator alarm untuk proses pengambilan.
5. Tampilan flow storage : Tampilan indikator proses penyimpanan dari input barcode sampai kembali ke home position.
6. Tampilan flow retrieve : Tampilan indikator proses pengambilan dari input data pengambilan sampai kembali ke home positon.
7. Stop Operasi : Stop pengoperasian alat.
8. Status Error : Indikator error pada LabVIEW.
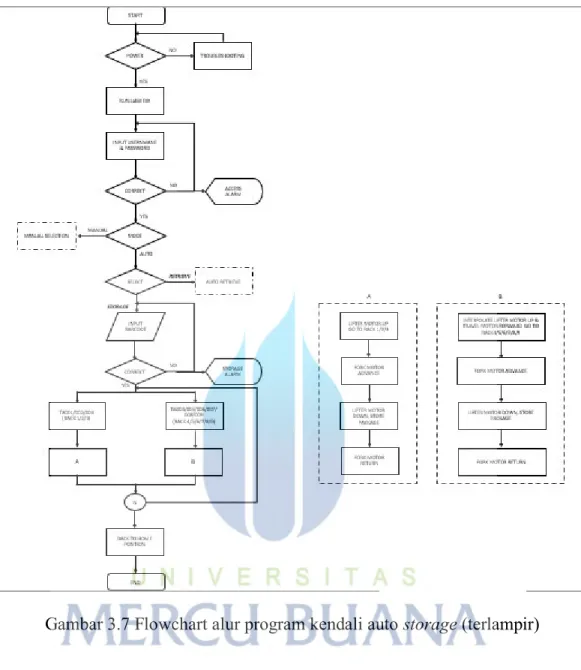
Detail proses Auto Storage dapat dilihat pada flowchart pada gambar 3.7 berikut :
Gambar 3.7 Flowchart alur program kendali auto storage (terlampir)
Pada tampilan front panel kendali auto (storage) ini terdapat satu input yaitu barcode scanner, data yang dihasilkan oleh barcode scanner akan tampil pada kolom Input Barcode, data tersebut merepresentasikan rak yang akan dituju untuk proses penyimpanan. Data barcode akan diverifikasi kebenarannya oleh program LabVIEW, jika data Input Barcode yang dimasukkan tidak sesuai, maka akan ada indikasi INPUT BARCODE ALARM pada kolom Storage Destination dan sistem tidak akan berjalan. Dan juga jika pada rak yang dituju sesuai data
barcode, telah terisi (indikator fotosensor keberadaan barang menyala), maka akan ada indikasi RACK FULL pada kolom Storage Destination dan sistem tidak akan berjalan.
Jika data yang dihasilkan oleh barcode scanner benar, dan tidak ada alarm, maka sistem akan berjalan sesuai data barcode yang telah diinisialisasi oleh program LabVIEW. Ketika yang dituju adalah rak 1/2/3, maka aktuator penggerak yang berjalan adalah motor stepper (Lifter Motor Up/Down), dan motor dc (Fork Motor Advance/Return) sampai barang tersimpan pada rak. Dan ketika yang dituju adalah rak 4/5/6/7/8/9, maka aktuator penggerak yang berjalan adalah motor stepper (Lifter Motor Up/Down) yang berinterpolasi dengan motor stepper (Travel Motor Forward/Reverse), dan motor dc (Fork Motor Advance/Return), sampai barang tersimpan pada rak.
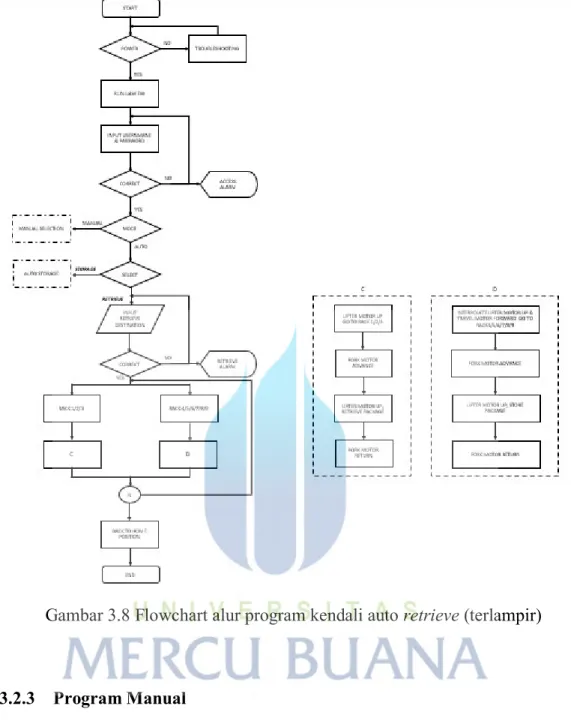
3.2.2 Program Auto Retrieve
Penjelasan untuk program kendali auto (retrieve) tidak jauh berbeda dengan program kendali auto (storage). Yang berbeda hanya pada input datanya menggunakan data (RACK “ “) dan proses pergerakkan aktuatornya. Pada program kendali ini, aktuator penggerak berjalan mengambil barang. Secara flow process dan interpolasi sama dengan program kendali auto (storage). Detail proses bisa dilihat pada flowchart pada gambar 3.8 di bawah ini :
Gambar 3.8 Flowchart alur program kendali auto retrieve (terlampir)
3.2.3 Program Manual
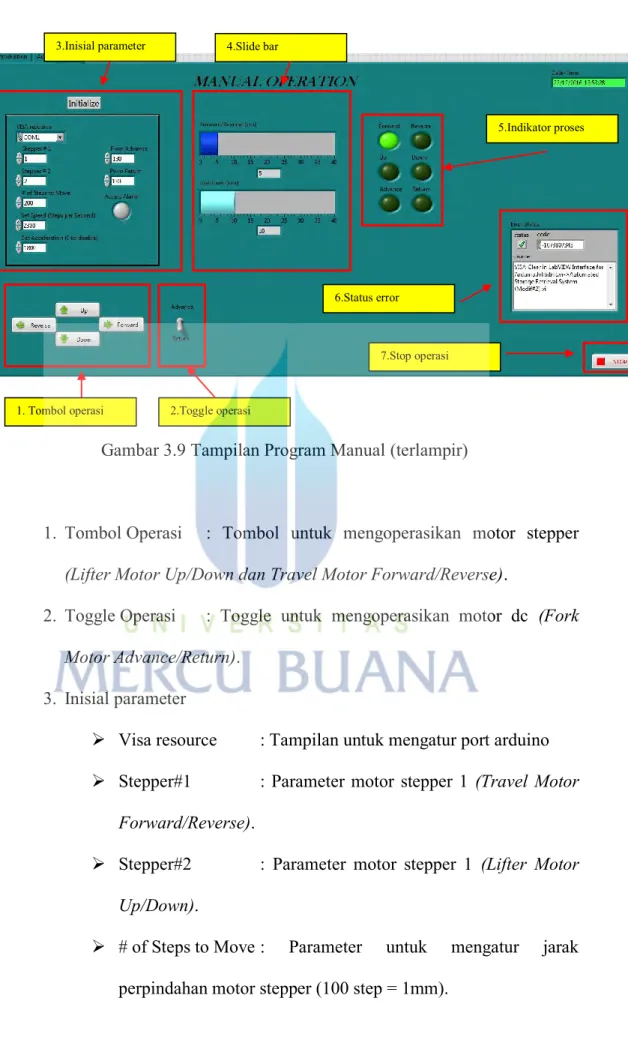
Program kendali manual ini, menampilkan proses kendali dan indikator motor stepper (Lifter Motor Up/Down dan Travel Motor Advance/Return) dan motor dc (Fork Motor Advance/Return) secara manual satu per satu. Sebelum menjalankan proses secara manual, terlebih dahulu memasukan parameter jarak pergerakan (Step), kecepatan (Set Speed), percepatan (Set Acceleration) untuk motor stepper dan parameter (PWM) untuk motor dc. Tampilan program manual
dapat dilihat pada gambar 3.9 berikut :
Gambar 3.9 Tampilan Program Manual (terlampir)
1. Tombol Operasi : Tombol untuk mengoperasikan motor stepper (Lifter Motor Up/Down dan Travel Motor Forward/Reverse).
2. Toggle Operasi : Toggle untuk mengoperasikan motor dc (Fork Motor Advance/Return).
3. Inisial parameter
Visa resource : Tampilan untuk mengatur port arduino
Stepper#1 : Parameter motor stepper 1 (Travel Motor Forward/Reverse).
Stepper#2 : Parameter motor stepper 1 (Lifter Motor Up/Down).
# of Steps to Move : Parameter untuk mengatur jarak
3.Inisial parameter 4.Slide bar
5.Indikator proses
7.Stop operasi 6.Status error
2.Toggle operasi 1. Tombol operasi
Set Speed : Parameter untuk mengatur kecepatan motor stepper.
Set Acceleration : Parameter untuk mengatur percepatan motor stepper.
Pwm Advance : Parameter untuk mengatur kecepatan motor dc (Fork Motor Advance).
Pwm Return : Parameter untuk mengatur kecepatan motor dc (Fork Motor Return).
4. Slide Bar : Tampilan jarak pergerakkan motor stepper secara aktual (cm).
5. Indikator Proses : Tampilan indikator proses manual.
6. Status Error : Indikator error pada LabVIEW 7. Stop Operasi : Stop pengoperasian alat
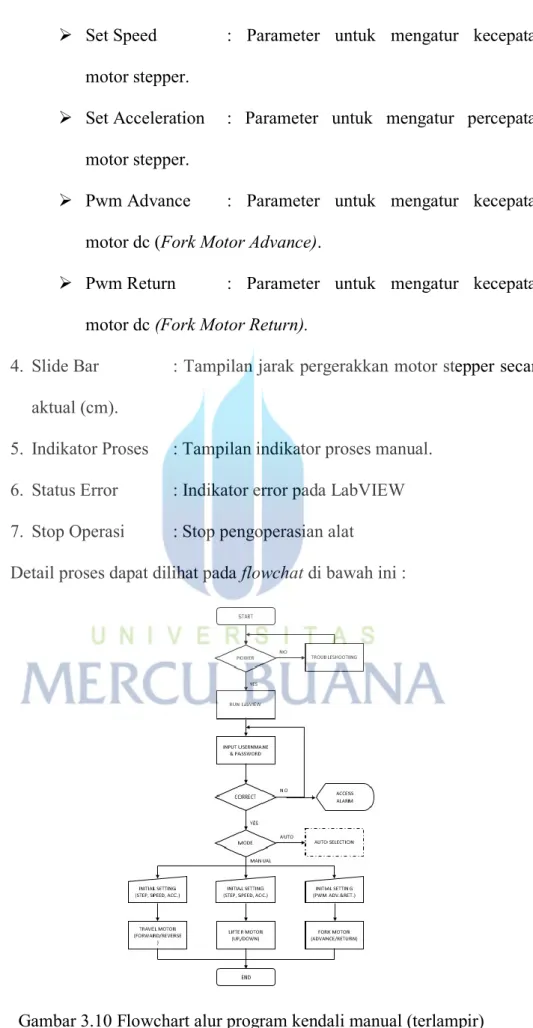
Detail proses dapat dilihat pada flowchat di bawah ini :
Gambar 3.10 Flowchart alur program kendali manual (terlampir)