Abstrak— Akhir-akhir ini pengolahan citra digital memegang peranan yang cukup penting. Salah satu peranannya adalah melakukan pengenalan pola. Pengenalan pola bisa diaplikasikan dalam kegiatan industri pertahanan untuk dapat mengenali kecacatan pada peluru, sehingga dapat mempermudah dan mempercepat proses pemisahan antara peluru cacat dan baik.
Tujuan penelitian ini adalah menggunakan teknik yang ada pada pengolahan citra digital untuk masukan pelatihan maupun pengujian. Serta algoritma Learning Vector Quantization(LVQ) untuk pengenalan pola pada peluru. Adapun tahap pengolahan citra yaitu mengubah citra masukan yang berupa RGB menjadi grayscale, cropping, normalisasi citra menjadi ukuran 50x50, proses filter menggunakan operasi Laplacian of Gaussian, dan proses binerisasi dengan Treshold 0.3. Hasil dari proses binerisasi itulah yang kemudian digunakan sebagai vektor input pada proses pelatihan dan pengujian algoritma Learning Vector Quantization (LVQ). Berdasarkan hasil pengujian menunjukkan sistem ini dapat mengenal bentuk peluru dengan tingkat keberhasilan 78%. Banyak faktor yang mempengaruhi kegagalan pada proses pengenalan yaitu noise atau gangguan yang terlalu banyak, dan kecacatan peluru yang sangat kecil sehingga tidak terdeteksi sewaktu filterisasi.
Kata Kunci--- Peluru, Pengolahan Citra, Laplacian of Gaussian (LoG), Jaringan Syaraf Tiruan, Learning Vector Quantization (LVQ).
I. PENDAHULUAN
NDUSTRI pertahanan di Indonesia mulai berkembang.
Oleh karena itu, untuk dapat melayani permintaan yang semakin banyak industri tersebut harus mempercepat proses produksi, menambah karyawan dan alat produksi. Selain itu mereka harus tetap mempertahankan kualitasnya. Hal ini perlu dilakukan supaya industri pertahanan indonesia dapat bersaing dengan industri pertahanan luar negeri. Misalnya pada seleksi peluru, untuk memisahkan peluru yang cacat dengan yang tidak. Selama ini proses tersebut masih dilakukan secara manual yang mengakibatkan waktu produksi kurang efektif.
Disisi lain, perkembangan teknologi semakin canggih.
Teknologi pengenalan pola menggunakan komputer banyak diterapkan dalam kegiatan industri. Teknologi tersebut dapat diterapkan pada industri pertahanan, yaitu dalam proses seleksi hasil produksi peluru antara baik dan cacat.
Penyeleksian hasil produksi peluru selama ini masih manual menggunakan penglihatan manusia dapat digantikan dengan teknologi tersebut.
Penelitian ini bertujuan menerapkan teknik pengolahan citra dan algoritma Learning Vector !uantization (LVQ) untuk
pengenalan kecacatan pada peluru. Beberapa penelitian sebelumnya juga menggunakan algoritma LVQ dalam pengenalan pola antara lain: pengenalan secara otomatis lima jenis sel darah putih [1], pengenalan tulisan [2], pengenalan tanda tangan[3], pengenalan jenis botol [4]. Dan algoritma ini dipilih karena menurut Maharani,dan kawan-kawan [5]
metode Learning Vector Quantization (LVQ) memiliki rata- rata waktu lebih baik dari metode backpropagation dalam hal pengenalan.
II. DASARTEORI A. Peluru
Peluru merupakan bagian dari senjata api yang memiliki beberapa jenis mulai 22 Long Rifle, 17 Hornady Mach 2, 4.7x33 DM11 Caseless, dan lain-lain. Berikut adalah contoh dari jenis-jenis peluru:
Peluru umumnya terdiri dari beberapa bagian yaitu catridge, bullet, catridge case, smokeles gunpowder, primer, hal ini ditunjukkan pada gambar 2.2.
Gambar 1 Bagian-bagian dari Peluru[5]
Dalam pembuatan peluru tidak jarang terdapat kecacatan yang dapat mempengaruhi daya tahan, kualitas, maupun tingkat keamanan pengguna. Kecacatan pada peluru bermacam, secara umum adalah smeared, Defective Head, Nicked or Dent, Defective Crimp dan lain-lain.
Identifikasi Cacat Peluru dengan Menggunakan Pengolahan Citra Digital Berbasis Learning Vector
Quantization (LVQ)
Angger Gusti Z dan Dwi Ratna S
Jurusan Matematika, Fakultas Matematika dan Ilmu Pengetahuan Alam Institut Teknologi Sepuluh Nopember (ITS) Surabaya
Jl. Arief Rahman Hakim, Surabaya 60111 Indonesia
e-mail: [email protected]I
B. Pengolahan Citra Digital
Pengolahan citra digital adalah proses memanipulasi dan menganalisis citra, khususnya dengan menggunakan komputer, menjadi citra yang kualitasnya lebih baik.
Pengolahan citra dilakukan untuk memperbaiki kualitas citra agar mudah diinterpretasi oleh manusia atau mesin (dalam hal ini komputer). Operasi-operasi yang dilakukan di dalam pengolahan citra banyak jenisnya, antara lain konversi format citra digital, mengubah format RGB menjadi Grayscale, cropping, scalling, filtering Laplacian of Gaussian dan binerisasi.
1. Grayscalling
Grayscalling adalah teknik yang digunakan untuk mengubah citra berwarna (RGB) menjadi citra yang memiliki nilai keabuan (dari hitam menuju putih). Pengubahan dari citra berwarna ke bentuk grayscale mengikuti aturan berikut :
𝑠 =𝑟+𝑔+𝑏
3 (1) dengan :
S = Nilai intensitas citra grayscale
r = Nilai intensitas warna merah dari citra asal g = Nilai intensitas warna hijau dari citra asal b = Nilai intensitas warna biru dari citra asal 2. Cropping
Cropping bertujuan untuk memotong citra sehingga citra yang diolah lebih kecil. Pemotongan tersebut dilakukan dengan cara mencari piksel-piksel terluar dari setiap sisi (atas, bawah, kiri, kanan). Piksel-piksel terluar itulah yang akan menjadi batas pemotongan, sehingga didapat citra segiempat yang siap diproses lebih lanjut.
3. Scalling
Scalling bertujuan untuk mengubah ukuran pixel menjadi pixel ukuran M x N. Hal ini dilakukan karena setiap citra yang diolah belum tentu mempunyai ukuran yang sama. Scalling juga digunakan untuk memperkecil citra digital agar jumlah pixel yang akan diolah tidak terlalu banyak. Semakin banyak jumlah pixel maka semakin banyak data inputan. Sehingga menyebabkan semakin lama waktu komputasi.
4. Laplacian of Gaussian
Laplacian of Gaussian terbentuk dari proses Gaussian yang diikuti operasi laplace. Fungsi Gaussian akan mengurangi derau sedangkan Laplacian akan menajamkan citra. Operator Laplace juga dapat mendeteksi lokasi tepi lebih akurat khususnya pada tepi yang curam. Hal ini dikarenakan zero- crossing sendiri yang mendefenisikan lokasi tepi. Pada tepi yang curam, turunan keduanya mempunyai zero-crossing, yaitu titik dimana terdapat pergantian tanda nilai turunan kedua sedangkan pada tepi yang landai tidak terdapat zero- crossing.
Fungsi dari Laplacian of Gaussian sebagai berikut, 𝐿𝑂𝐺 𝑥, 𝑦 = 2𝜎2−𝑥2+𝑦2
2𝜎2 𝑒
𝑥 2+𝑦 2
2𝜎 2 (2) Algoritma Laplacian of Gaussian
1. Input image
2. Pengaburan image, pengaburan ini dilakukan dengan convolving image menggunakan Gaussian (sebuah
low pass filter umum memiliki riak, dan riak ditampilkan sebagai tepi)
3. Melakukan filter Laplacian pada image 5. Binerisasi
Binerisasi citra merupakan proses merubah citra ke dalam bentuk biner (0 dan 1). Dengan merubah ke bentuk biner, citra hanya akan mempunyai 2 warna yakni, hitam dan putih.
Proses pembineran dilakukan dengan membulatkan ke atas atau ke bawah untuk setiap nilai keabuan dari piksel yang berada di atas atau dibawah harga ambang. Metode untuk menentukan besarnya harga ambang disebut thresholding.
Thresholding digunakan untuk mengatur jumlah derajat keabuan yang ada pada citra. Denganadanya thresholding maka derajat keabuan bisa diubah sesuai keingin dengan persamaan berikut :
𝑓 𝑥, 𝑦 ′= 𝑎1, 𝑓 𝑥, 𝑦 < 𝑇
𝑎2, 𝑓 𝑥, 𝑦 ≥ 𝑇 (3) dengan :
𝑓 𝑥, 𝑦 ′ = Nilai intensitas yang baru 𝑓(𝑥, 𝑦) = Nilai intensitas yang lama T = Nilai Threshold
C. Learning Vector Quantization
Learning Vector Quantization (LVQ) adalah suatu metode untuk melakukan pembelajaran pada lapisan kompetitif yang terawasi. Suatu lapisan kompetitif akan secara otomatis belajar untuk mengklasifikasikan vektor-vektor input. Kelas-kelas yang didapatkan sebagai hasil dari lapisan kompetitif ini hanya tergantung pada jarak antara vektor-vektor input. Jika 2 vektor input mendekati sama, maka lapisan kompetitif akan meletakkan kedua vektor tersebut ke dalam kelas yang sama.
Gambar 2 Arsitekture LVQ Adapun langkah-langkah dari algoritma LVQ adalah sebagai berikut [6]:
Langkah 1 : Inisialisasi vektor referensi dan learning rate Langkah 2 : Selama kondisi berhenti bernilai salah,
kerjakan a, b, dan c berikut:
a. Untuk setiap vektor x, kerjakan point 1 dan 2 berikut:
1. Temukan J sehingga ||x – wj|| minimum 2. Update wj dengan mengikuti rumus:
Jika T = cj maka wj = wj + α[x - wj] Jika T ≠ cj maka wj = wj - α[x – wj] b. Kurangi learning rate
c. Periksa kondisi berhenti
x : vektor pelatihan (x1, ..., xj, ..., xn)
T : kategori atau kelas yang benar untuk vektor pelatihan wj : vektor bobot untuk unit luaran ke-j (w1j, .., wij, .., wnj) cj : kategori atau kelas hasil komputasi oleh unit luaran j
||x – wj|| : jarak Eucledian antara vektor masukan dengan unit luaran
III. PERANCANGANSISTEM A. Perancangan Data
1. Data Masukan
Data masukan dalam sistem ini adalah data yang dimasukkan oleh pengguna berupa citra peluru. Data ini merupakan hasil dari pengambilan citra peluru pada tempat yang telah di sediakan.
2. Data Proses
Berikut adalah data-data proses dalam sistem identifikasi cacat peluru.
Tabel 1 Data Proses
Nama Data Tipe Data Keterangan Citra cropping Uint8 Data ini berupa matriks
hasil cropping citra Peluru Area scalling Uint8
Data ini berupa matriks yang merupakan hasil dari scalling citra cropping.
Filter LoG(Laplacian
of Gaussian)
Uint8
Data ini berupa nilai piksel hasil dari filter LoG citra scalling.
Binerisasi Logical
Data ini berupa nilai piksel biner( 0 dan 1) citra filter LoG
Tipe data Uint8 adalah tipe data yang mempunyai rentang nilai 0-255(bulat positif). Sedangkan logical mempunyai nilai 0 dan 1 dan menghasilkan warnahitam dan putih.
3. Data Luaran
Data luaran pada sistem ini berupa hasil pengenalan oleh algoritma LVQ terhadap data yang diberikan.
B. Gambaran Sistem Secara Umum
Sistem ini terdiri dari beberapa tahapan, yaitu tahap akuisisi, tahap pengolahan citra, dan tahap JST.
Tahap akuisisi adalah tahapan awal sebelum memulai proses lain. Pada tahap ini sistem melakukan pengambilan citra peluru yang telah diambil sebelumnya pada tempat yang telah di sediakan.
Adapun tahap pengolahan citra terdiri dari 4 proses sebagai berikut:
1. Proses cropping, yaitu proses memotong citra akuisisi sehingga diperoleh citra yang diharapkan. Dalam sistem ini, citra yang diharapkan adalah citra akuisisi yang dibatasi oleh piksel terluar yang nilai pikselnya ditentukan. Sehingga diperoleh citra yang terdapat obyek pelurunya saja.
Dari proses cropping, sistem akan menghasilkan ukuran citra yang dirumuskan sebagai berikut:
𝑤’ = (𝑋
𝑅– 𝑋
𝐿)
’ = (𝑌
𝐵– 𝑌
𝑇) (4)
dengan:𝑤’
adalah lebar citra cropping’
adalah tinggi citra cropping𝑋
𝑅 adalah piksel sumbu𝑥
paling kanan (batas kanan)𝑋
𝐿 adalah piksel sumbu𝑥
paling kiri (batas kiri)𝑌
𝐵 adalah piksel sumbu𝑦
paling bawah (batas bawah)𝑌
𝑇 adalah piksel sumbu𝑦
paling atas (batas atas) 2. Proses scalling, yaitu proses untuk mengubah ukurancitra menjadi citra normal yang sesuai dengan kebutuhan.
Dalam tugas akhir ini, citra peluru akan direpresentasikan ke dalam matriks berukuran 50x50 dengan luas yang sama di masing-masing area. Dengan demikian ukuran luas masing-masing area dapat dirumuskan sebagai berikut:
𝑤’’ = 𝑤’/50 ’’ = ’/50
(5) dengan:𝑤’’
adalah lebar per area hasil scalling’’
adalah tinggi per area hasil scalling3. Proses filter citra menggunakan operator Laplacian of Gaussian. Pendekatan operator LoG dimulai dengan proses pengaburan citra dengan menggunakan filter Gaussian
𝑔
𝑐𝑥, 𝑦 = e
(−𝑥2+𝑦 22𝜎 2 ) (6)Dilanjutkan dengan filter penajaman menggunakan filter laplacian
∇
2𝑓 𝑥, 𝑦 =
𝜕2𝑓(𝑥,𝑦)𝜕𝑥2+
𝜕2𝜕𝑦𝑓(𝑥,𝑦)2 (7)Dari persamaan (6) dan (7) akan didapatkan persamaan (2) yang merupakan rumus untuk mencari nilai kernel/mask dari filter Laplacian of Gaussian (LoG).
4. Proses Binerisasi dilakukan setelah citra dikenai proses filter menggunakan operator Laplacian of Gaussian.
Pada proses ini citra diubah menjadi citra biner(0 dan 1).
Untuk mengatur intensitas citra biner digunakan Tresholding yang dapat diatur.
Pada tahap selanjutnya adalah tahap JST terdiri dari 2 proses, yaitu:
1. Proses pelatihan (training), yaitu proses melatih sistem sehingga mampu mengenali apabila diberikan masukan baru.
2. Proses pengujian (testing), yaitu proses pencocokan ciri suatu masukan baru terhadap ciri referensi yang sebelumnya telah dilatihkan kepada sistem.
Gambaran sistem identifikasi kecacatan peluru dengan menggunakan algoritma LVQ mempunyai urutan tahap akuisisi, tahap pengolahan citra yaitu (proses cropping, proses scalling,proses filter, proses binerisasi), tahap selanjutnya adalah tahap JST. Tahapan-tahapan tersebut untuk lebih jelasnya dapat dilihat pada Gambar 3 berikut:
Gambar 3 Diagram Alir Proses Pelatihan (a) dan Diagram Alir Proses Pengujian (b)
IV. PENGUJIANDANPEMBAHASAN
Perangkat yang digunakan dalam pengujian sistem terdiri dari beberapa perangkat keras dan perangkat lunak. Perangkat keras yang digunakan yaitu komputer dengan Prosesor intel(R) core(TM) i3-2370M CPU2.4 GHz, Memory 4 GB DDR3,. Sedangkan perangkat lunak yang digunakan adalah Matlab R2013a.
A. Pengujian Tahap Akuisisi
Tujuan dari pengujian tahap akuisisi adalah untuk mengetahui bahwa sistem telah mendapatkan piksel-piksel dari peluru. Pengujian dilakukan dengan cara menginputkan file citra Peluru ke dalam program yang telah dibuat.
Gambar 4 berikut merupakan gambar proses akuisisi oleh Matlab:
Gambar 4 Citra Peluru ukuran 1728x2592 pixel
B. Pengujian Tahap Pengolahan Citra Digital 1. Pengujian Proses Cropping
Pengujian proses cropping bertujuan untuk mengetahui bahwa sistem berhasil mengambil obyek, sehingga yang tersisa hanya citra peluru.
Gambar 5 berikut adalah gambar peluru yang telah dikenai proses cropping sehingga ukurannya menjadi lebih kecil. Ukuran pixelnya menjadi 375x369.
Gambar 5 Hasil Cropping Data Pelatihan 2. Pengujian Proses Scalling
Pengujian proses scallling bertujuan untuk mengetahui bahwa sistem telah mengubah ukuran pixel citra menjadi 50x50.
Gambar 6 berikut adalah gambar peluru yang telah di kecilkan menjadi ukuran 50x50.
Gambar 6 Hasil Scalling Citra Peluru 3. Pengujian Proses Filterisasi
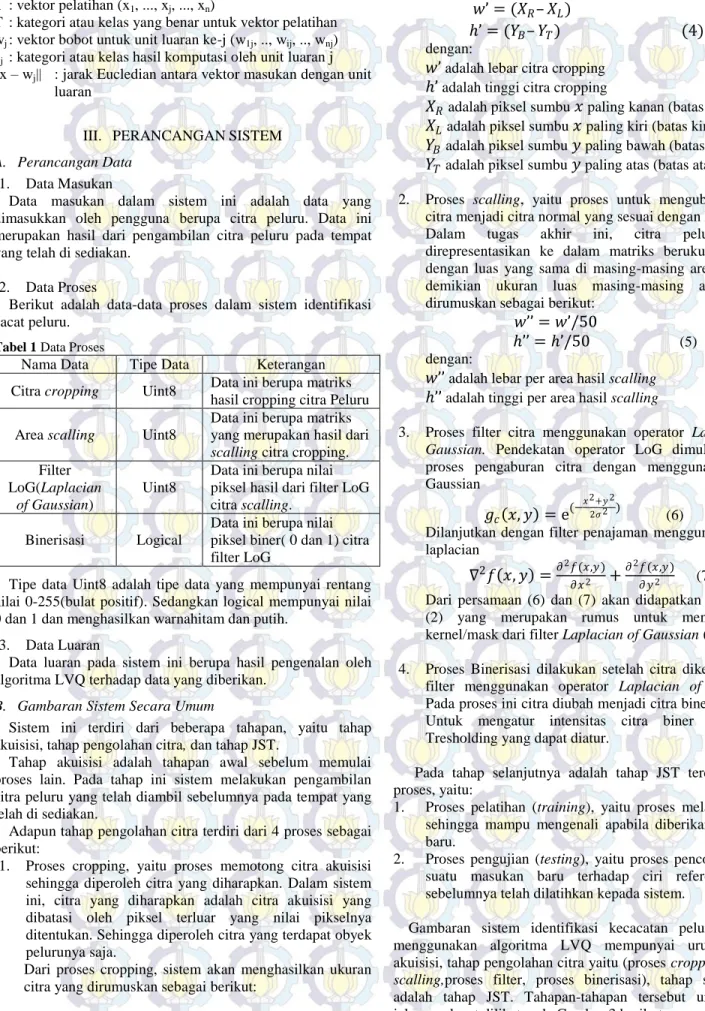
Pengujian tahap filterisasi ini bertujuan untuk mendapatkan citra hasil pemfilteran dari operator Laplacian of Gaussian. Citra pertama-tama akan dikaburkan oleh operator Gaussian yang bertujuan untuk menghilangkan nosie. Selanjutnya akan ditajamkan oleh operator Laplacian.
Gambar 7 Hasil filter Laplacian of Gaussian Citra Peluru Gambar 7 adalah gambar peluru yang telah dikenai proses filter oleh mask atau kernel dari operator Laplacian of Gasussian.
4. Pengujian Proses Binerisasi
Pengujian tahap Biner ini bertujuan untuk mendapatkan citra yang telah diubah menjadi citra biner(0 dan 1). Untuk mengatur intensitas citra biner digunakan Thresholding yang dapat diatur.
Gambar 8 Hasil Binerisasi Citra Peluru
Gambar 8 merupakan gambar hasil binerisasi dengan threshold=0.3.
C. Pengujian Tahap LVQ 1. Pengaruh Learning Rate
Learning rate dalam algoritma LVQ merupakan konstanta yang digunakan untuk mencari bobot baru. Rumus untuk mencari bobot dalam algoritma LVQ adalah sebagai berikut:
𝑤
𝑗𝑏𝑎𝑟𝑢= 𝑤
𝑗𝑙𝑎𝑚𝑎∓ 𝛼 𝑥 − 𝑤
𝑗𝑙𝑎𝑚𝑎(8)
dengan:𝑤𝑗 adalah bobot ke-𝑗 𝑥 adalah vektor pelatihan 𝛼 adalah learning rate
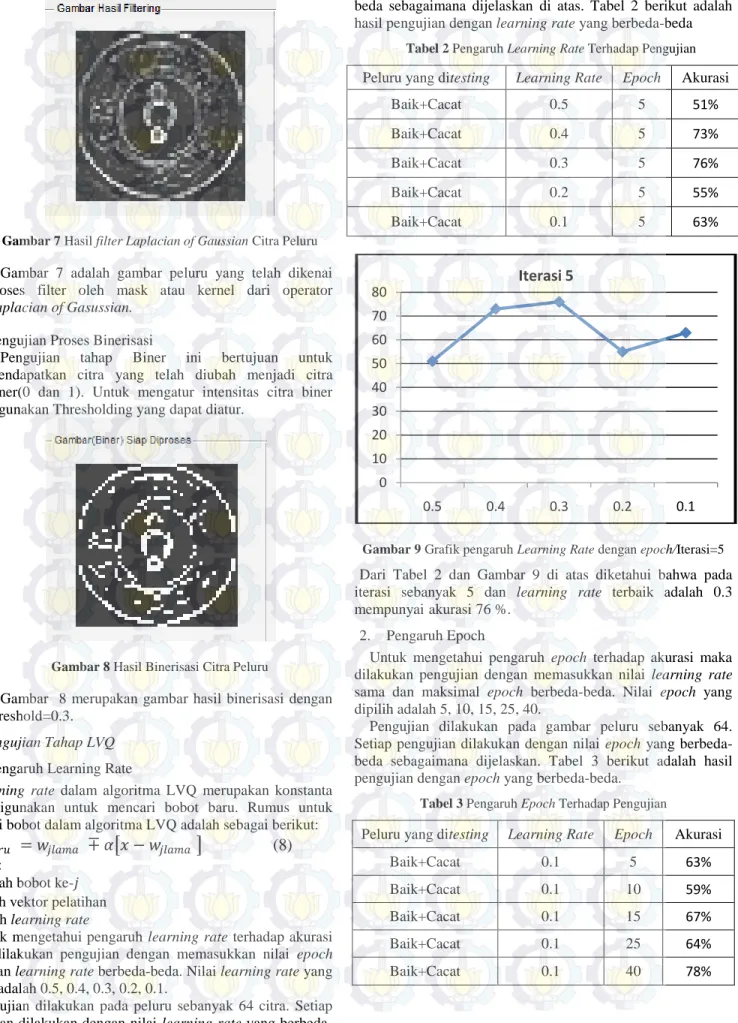
Untuk mengetahui pengaruh learning rate terhadap akurasi maka dilakukan pengujian dengan memasukkan nilai epoch sama dan learning rate berbeda-beda. Nilai learning rate yang dipilih adalah 0.5, 0.4, 0.3, 0.2, 0.1.
Pengujian dilakukan pada peluru sebanyak 64 citra. Setiap pengujian dilakukan dengan nilai learning rate yang berbeda-
beda sebagaimana dijelaskan di atas. Tabel 2 berikut adalah hasil pengujian dengan learning rate yang berbeda-beda
Tabel 2 Pengaruh Learning Rate Terhadap Pengujian Peluru yang ditesting Learning Rate Epoch Akurasi
Baik+Cacat 0.5 5 51%
Baik+Cacat 0.4 5 73%
Baik+Cacat 0.3 5 76%
Baik+Cacat 0.2 5 55%
Baik+Cacat 0.1 5 63%
Gambar 9 Grafik pengaruh Learning Rate dengan epoch/Iterasi=5 Dari Tabel 2 dan Gambar 9 di atas diketahui bahwa pada iterasi sebanyak 5 dan learning rate terbaik adalah 0.3 mempunyai akurasi 76 %.
2. Pengaruh Epoch
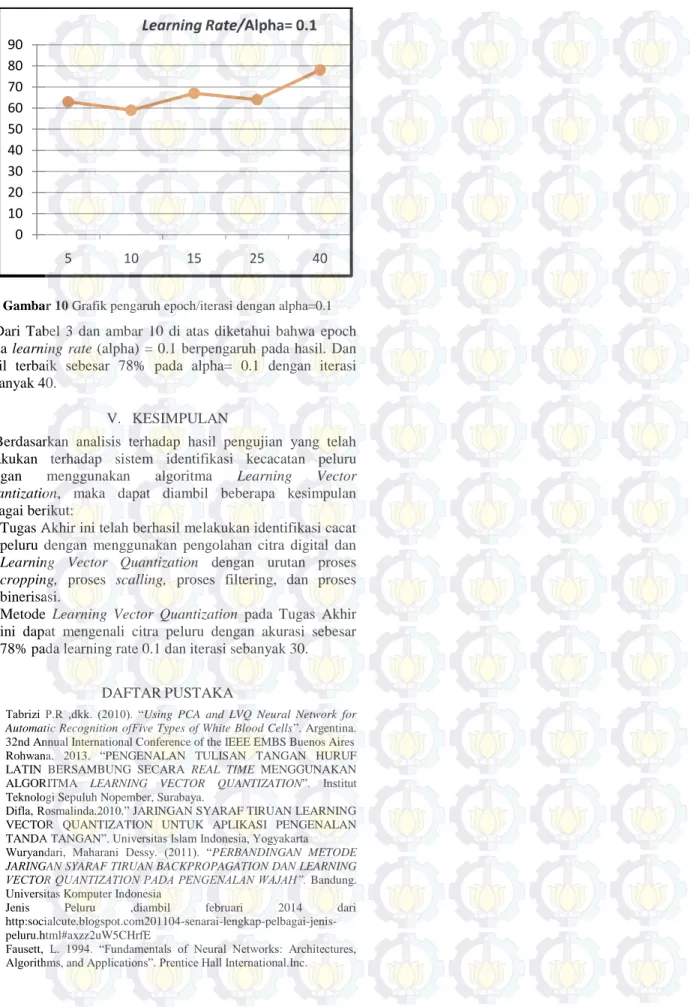
Untuk mengetahui pengaruh epoch terhadap akurasi maka dilakukan pengujian dengan memasukkan nilai learning rate sama dan maksimal epoch berbeda-beda. Nilai epoch yang dipilih adalah 5, 10, 15, 25, 40.
Pengujian dilakukan pada gambar peluru sebanyak 64.
Setiap pengujian dilakukan dengan nilai epoch yang berbeda- beda sebagaimana dijelaskan. Tabel 3 berikut adalah hasil pengujian dengan epoch yang berbeda-beda.
Tabel 3 Pengaruh Epoch Terhadap Pengujian
Peluru yang ditesting Learning Rate Epoch Akurasi
Baik+Cacat 0.1 5 63%
Baik+Cacat 0.1 10 59%
Baik+Cacat 0.1 15 67%
Baik+Cacat 0.1 25 64%
Baik+Cacat 0.1 40 78%
0 10 20 30 40 50 60 70 80
0.5 0.4 0.3 0.2 0.1
Iterasi 5
Gambar 10 Grafik pengaruh epoch/iterasi dengan alpha=0.1 Dari Tabel 3 dan ambar 10 di atas diketahui bahwa epoch pada learning rate (alpha) = 0.1 berpengaruh pada hasil. Dan hasil terbaik sebesar 78% pada alpha= 0.1 dengan iterasi sebanyak 40.
V. KESIMPULAN
Berdasarkan analisis terhadap hasil pengujian yang telah dilakukan terhadap sistem identifikasi kecacatan peluru dengan menggunakan algoritma Learning Vector Quantization, maka dapat diambil beberapa kesimpulan sebagai berikut:
1. Tugas Akhir ini telah berhasil melakukan identifikasi cacat peluru dengan menggunakan pengolahan citra digital dan Learning Vector Quantization dengan urutan proses cropping, proses scalling, proses filtering, dan proses binerisasi.
2. Metode Learning Vector Quantization pada Tugas Akhir ini dapat mengenali citra peluru dengan akurasi sebesar 78% pada learning rate 0.1 dan iterasi sebanyak 30.
DAFTARPUSTAKA
[1] Tabrizi P.R ,dkk. (2010). “Using PCA and LVQ Neural Network for Automatic Recognition ofFive Types of White Blood Cells”. Argentina.
32nd Annual International Conference of the IEEE EMBS Buenos Aires [2] Rohwana. 2013. “PENGENALAN TULISAN TANGAN HURUF LATIN BERSAMBUNG SECARA REAL TIME MENGGUNAKAN ALGORITMA LEARNING VECTOR QUANTIZATION”. Institut Teknologi Sepuluh Nopember, Surabaya.
[3] Difla, Rosmalinda.2010.” JARINGAN SYARAF TIRUAN LEARNING VECTOR QUANTIZATION UNTUK APLIKASI PENGENALAN TANDA TANGAN”. Universitas Islam Indonesia, Yogyakarta [4] Wuryandari, Maharani Dessy. (2011). “PERBANDINGAN METODE
JARINGAN SYARAF TIRUAN BACKPROPAGATION DAN LEARNING VECTOR QUANTIZATION PADA PENGENALAN WAJAH”. Bandung.
Universitas Komputer Indonesia
[5] Jenis Peluru ,diambil februari 2014 dari http:socialcute.blogspot.com201104-senarai-lengkap-pelbagai-jenis- peluru.html#axzz2uW5CHrfE
[6] Fausett, L. 1994. “Fundamentals of Neural Networks: Architectures, Algorithms, and Applications”. Prentice Hall International.Inc.
0 10 20 30 40 50 60 70 80 90
5 10 15 25 40
Learning Rate/Alpha= 0.1
![Gambar 1 Bagian-bagian dari Peluru[5]](https://thumb-ap.123doks.com/thumbv2/123dok/3587578.3871968/1.918.122.814.86.1097/gambar-bagian-bagian-dari-peluru.webp)
![Gambar 2 Arsitekture LVQ Adapun langkah-langkah dari algoritma LVQ adalah sebagai berikut [6]:](https://thumb-ap.123doks.com/thumbv2/123dok/3587578.3871968/2.918.122.842.80.1089/gambar-arsitekture-adapun-langkah-langkah-algoritma-sebagai-berikut.webp)