RANCANGAN ALAT UKUR KETEBALAN KAYU DENGAN SENSOR HC-SR04 BERBASIS ARDUINO
PROJEK AKHIR 2
STEVANY LOURENTIA BR BANGUN 152411072
PROGRAM STUDI D3 METROLOGI DAN INSTRUMENTASI DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
MEDAN 2018
RANCANGAN ALAT UKUR KETEBALAN KAYU DENGAN SENSOR HC-SR04 BERBASIS ARDUINO
LAPORAN TUGAS AKHIR
Diajukan untuk melengkapi tugas dan memenuhi syarat memperoleh Ahli Madya
STEVANY LOURENTIA BR BANGUN 152411072
PROGRAM STUDI D3 METROLOGI DAN INSTRUMENTASI DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
MEDAN 2018
LEMBAR PENGESAHAN
Judul : Perancangan Alat Ukur Ketebalan kayu Menggunakan Sensor HC-SR04 dengan tampilan LCD Berbasis Arduino Kategori : Projek Akhir 2
Nama : Stevany Lourentia br Bangun NIM : 152411072
Program Studi : Diploma (D3) Metrologi Dan Instrumentasi Departemen : Fisika
Fakultas : Matematika Dan Ilmu Pengetahuan Alam Universitas Sumatera Utara
Disetujui di Medan, 16 Juli 2018
Disetujui Oleh
Program Studi D3 Metrologi dan Instrumentasi
Ketua, Dosen Pembimbing,
Dr.Diana Alemin Barus, M.Sc Drs. Herli Ginting, MS NIP.196607291992032002 NIP.195505191986011001
PERNYATAAN
RANCANGAN ALAT UKUR KETEBALAN KAYU DENGAN SENSOR HC-SR04 BERBASIS ARDUINO
TUGAS AKHIR
Saya mengakui bahwa Projek Akhir ini adalah hasil karya sendiri. Kecuali beberapa kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan, Juli 2018
STEVANY LOURENTIA 152411072
PENGHARGAAN
Puji syukur penulis ucapkan kepada Tuhan Yang Maha Esa karena atas limpahan rahmat dan karunia-Nya sehingga Projek Akhir 2 ini dapat terselesaikan.
Dalam kesempatan ini penulis menyampaikan rasa ucapan terima kasih yang sebesar-besarnya kepada, Project Akhir ini serta buat seluruh keluarga yang telah membantu, mendukung dan memberikan kelonggaran serta dukungan terhadap pendidikan saya hingga bisa seperti sekarang.
Serta orang-orang yang mendukung sehingga penulis dapat menyelesaikan Projek Akhir ini. Pada kesempatan ini penulis mengucapkan terima kasih banyak kepada :
1. Yth.Bapak Dekan Dr. Kerista Sebayang, MS beserta jajarannya di lingkungan FMIPA USU
2. Ibu Dr. Diana Alemin Barus, M.Sc, selaku Ketua Program Studi D3 Metrologi dan Instrumentasi FMIPA. Penulis sangat berterima kasih untuk setiap bimbingan, masukan, saran bahkan waktu yang senantiasa diberikan kepada penulis sampai pada akhir penyelesaian projek akhir ini.
3. Bapak Junedi Ginting, S.Si, M.Si selaku dosen penguji saya. Saya sangat berterima kasih untuk waktu yang senantiasa diberikan kepada penulis sampai pada akhir penyelesaian projek akhir ini.
4. Bapak Drs. Herli Ginting, MS selaku dosen pembimbing saya. Penulis sangat berterima kasih untuk setiap masukan, saran bahkan waktu yang senantiasa diberikan kepada penulis sampai pada akhir penyelesaian projek akhir ini.
5. Seluruh Dosen dan Karyawan Program Studi D3 Metrologi Dan Instrumentasi Departemen Fisika FMIPA-USU
6. Kepada, Hendro Milano, Galio Agriva, dan Sinta Sibero, atas dukungan dan kerjasamanya yang telah membantu mengerjakan segala sesuatunya bersama- sama sehingga penulis menyelesaikan projek akhir ini dengan baik meskipun banyak halangan yang kita dapat.
7. Kepada Gledis Karlina Bangun yang dengan semangat memberikan waktunya dan sabar menunggu menyelesaikan Project akhir ini sampai tuntas terimakasih atas bantuan yang sangat luar biasa.
8. Kepada teman-teman seperjuangan di D3 Metrologi dan Instrumentasi Stambuk 2015 atas dorongan dan kesabaran kalian untuk menghadapi teman seperti saya ini.
9. Kepada orangtuaku Marken Bangun dan Harta Malem br Surbakti, yang sudah selalu menyemangati, mendukung, memberi semua yang terbaik serta mendoakan saya hingga sampai saya bisa menyelesaikan Projek Akhir saya ini.
Tak ada gading yang tak retak tak ada sesuatu yang sempurna, begitu juga dengan Tugas Akhir saya ini. Penulis menyadari bahwa Projek Akhir ini belum sempurna. Untuk itu, penulis mengharapkan kritik dan saran yang bersifat konstruktif guna perbaikan di masa mendatang. Dan berharap ini bermanfaat dan dapat menambah wawasan kita.
Medan, 23 Juli 2018 Penulis,
Stevany Lourentia
RANCANGAN ALAT UKUR KETEBALAN KAYU DENGAN SENSOR HC-SR04 BERBASIS ARDUINO
ABSTRAK
Tujuan dalam perancangan dan pembuatan alat pengukur ketebalan kayu dapat di manfaatkan di seebuah industri perkayuan. dengan menggunakan alat ini dapat diketahui ketebalan kayu secara otomatis. Sistem yang di buat terdiri dari arduino , sensor hc-sr04 dan LCD. Sistim ini bekerja pada saat sensor hc-sr04 membaca data yang kemudian diolah oleh arduino dan data ditampilkan ke LCD. sistem ini sensitif pada jarak centimeter 10 (cm) sesuai dengan keperluan pengukuran ketebalan benda.
Kata Kunci : Kayu, Arduino, HCRS-04, dan LCD
ABSTRACT
The purpose of designing and manufacturing of wood thickness gauges can be utilized in the timber otomatically. The system creates consist of arduino , sensor hcsr-04 and LCD. This system works when the sensor hc-sr04 reading data which is then prossesed by the arduino and data displayed to the LCD. This system can sensitif at 10 centimeter (cm) measurement of thickness corresponding bend with purposes.
Keywords : Wood, Arduino, HCSR-04, and LCD .
DAFTAR ISI
Halaman
PERSETUJUAN ... i
PERNYATAAN ... ii
PENGHARGAAN ... iii
ABSTRAK ... v
ABSTRACT ... vi
DAFTAR ISI ... vii
DAFTAR TABEL ... ix
DAFTAR GAMBAR ... x
DAFTAR LAMPIRAN ... xi
BAB I PENDAHULUAN 1.1. Latar Belakang ... 1
1.2. Rumusan Masalah ... 1
1.3. Batasan Masalah ... 2
1.4. Tujuan Penulisan ... 2
1.5. Manfaat Penulisan ... 2
1.6. Sistematika Penulisan ... 3
BAB II LANDASAN TEORI 2.1. Hardware Arduino ... 4
2.2. Software Arduino ... 5
2.3. Sumber Daya dan Tegangan Pin ... 10
2.4 Power ... 12
2.5 Sensor HCSR-04 ... 8
2.6 Prinsip Kerja Sensor HCSR04 ... 8
2.7 LCD (Liquid Crystal Display) ... 9
2.8 Resistor ... 10
2.9 PCB ... 12
2.10 LED ... 15
BAB III PERANCANGAN DAN PEMBUATAN SISTEM 3.1. Diagram Blok Rangkaian ... 16
3.2. Prinsip Kerja Alat ... 16
3.3. Rangkaian LCD ... 17
3.4. Prosedur Penelitian ... 18
3.5. Diagram Alir (Flowchart) Alat ukur ... 18
BAB IV PENGUJIAN DAN HASIL RANGKAIAN 4.1 Data Percobaan ... 20
4.3 Pengujian Keseluruhan ... 22
BAB V KESIMPULAN DAN SARAN 5.1 Kesimpulan ... 25
5.2 Saran ... 25 Daftar Pustaka ... 26
DAFTAR TABEL
No. JUDUL HALAMAN
2.1 Deskripsi Pin pada LCD 21
4.1 Data Percobaan Hasil Pengukuran 31
DAFTAR GAMBAR
No. JUDUL HALAMAN
2.1 Hardware Arduino 4
2.2 Sensor HCSR-04 8
2.3 Sistem pewaktu pada sensor HC-SR04 9
2.4 LCD (Liquid Crystal Display) 20
2.5 Gambar dan Lambang Resistor 22
2.6 Papan PCB 25
3.1 Diagram Blok Rangkaian 27
3.2 LCD 2 x 16 Karakter 27
3.3 Skematik Rangkaian LCD 27
3.4 Diagram Alir (Flowchart) 29
4.1 Aplikasi Arduino 40
BAB I
PENDAHULUAN
1.1. Latar Belakang
Pengukuran merupakan kegiatan yang sering dilakukan dan dibutuhkan dalam kehidupan sehari-hari. Bantuan alat dalam hal ini alat ukur sangat dibutuhkan untuk mengetahui nilai dari proses pengukuran. Alat bantu ini menggunakan sistem instrumentasi yang banyak digunakan di industri dan perusahaan khususnya di bidang metrologi dan perusahaan yang bergerak di bidang infrastruktur.
Di berbagai tempat dan di bidang metrologi kita jumpai alat ukur panjang khususnya alat untuk mengukur ketebalan kayu masih analog dan hasilnya tidak akurat karena masih menggunakan system perhitungan/pengukuran analog. Hal ini tentunya tidak di inginkan dan akan menimbulkan nilai yang berbeda beda setiap melakukan pemeriksaan/pengukuran di berbagai tempat. Alat ukur ketebalan kayu ini menggunakan sensor HC-SR04 berbasis Arduino Uno sebagai pusat kendalinya, sensor HC-SR04 sebagai sensor jarak yang akan mengukur ketebalan kayu sedangkan LCD sebagai penampilnya. Alat ini bekerja secara otomatis dengan merespon berapa besar tebal kayu yang dideteksi oleh sensor HC-SR04 berbasis Arduino Uno kemudian diproses dan memberikan output yang telah diprogram sebelumnya. Hasil pengukuran ini kemudian ditampilkan pada LCD..
Dalam penggunaan alat ini kebanyakan pemakai hanya mengetahui fungsi dasarnya saja dan tanpa di sadari bahwa alat ini masih mempunyai kegunaan yang dapat di kembangkan untuk lebih menghasilkan fungsi yang lain yang sangat penting. Oleh sebab itu penulis akan mencoba untuk membuat suatu alat yang berjudul ”Perancangan Alat Ukur Ketebalan kayu Menggunakan Sensor HC- SR04 dengan Tampilan LCD Berbasis Arduino”. Disini penulis memilih alat ukur tersebut sebagai alat yang di kembangkan karena sangat mempermudah dan membantu pekerjaan industri. .
1.2. Rumusan Masalah
Dari pembahasan latar belakang masalah uraian yang telah ada maka Projek Akhir I ini diarahkan pada permasalahan berikut:
1. Bagaimana prinsip kerja dari rangkaian alat ukur jarak ketebalan keyu.
2. Bagaimana perinsip kerja sensor HC-SR04 sebagai pengukur ketebalan.
3. Bagaimana fungsi dari masing - masing komponen utama yaitu, sensor HC-SR04, LCD dan konfigurasi pin yang digunakan pada Arduino, serta komponen pendukung lainnya.
1.3. Batasan Masalah
Mengingat keterbatasan waktu dan untuk menghindari topik yang tidak perlu maka penulis membatasi pembahasan pembuatan alat ini. Adapun permasalahan ini adalah :
1. Hasil pembacaan pengukuran ditampilkan pada LCD berukuran 16x2.
2. Skala terbesar pada Alat ukur ketebalan benda adalah 29 cm
3. Pada rancang bangun alat ukur, sensor yang digunakan berjenis HC- SR04
1.4. Maksud Dan Tujuan
Adapun maksud dan tujuan penulis melakukan penelitian ini adalah :
1. Sebagai salah satu syarat untuk dapat menyelesaikan mata kuliah pada program Diploma Tiga Metrologi Dan Instrumentasi FMIPA Universitas Sumatera Utara.
2. Pengembangan kreatifitas mahasiswa dalam bidang ilmu instrumentasi pengontrolan dan elektronika sebagai bidang diketahui.
3. Untuk menambah pengetahuan penulisan dalam membuat dan menganalisa suatu hasil praktek dengan teori ketika membuat alat ukur ketebalan benda.
1.5. Manfaat
Adapun manfaat pembahasan ini adalah :
1. Mempermudah perhitungan untuk mengukur ketebalan benda 2. Meningkatkan efisiensi waktu dalam pengukuran.
3. Sebagai persyaratan dalam mencapai gelar Ahli Madya sekaligus telah menyelesaikan pendidikan di Universitas Sumatera Utara.
1.6 Sistematika Penulisan
Untuk mempermudah penulisan Projek akhir 2 ini, penulis membuat suatu sistematika penulisan yang terdiri dari :
BAB I: PENDAHULUAN
Bab ini akan membahas latar belakang Projek akhir 2 , identifikasi masalah, batasan masalah, tujuan, metode penelitian, tinjauan pustaka, dan sistematika penulisan.
BAB II: LANDASAN TEORI
Bab ini akan menjelaskan tentang teori pendukung yang digunakan untuk pembahasan.
BAB III: PERANCANGAN DAN SISTEM KERJA RANGKAIAN
Bab ini membahas tentang perencanaan dan pembuatan sistem secara keseluruhan.
BAB IV: HASIL DAN PEMBAHASAN
Berisi tentang uji coba alat yang telah dibuat, pengoperasian dan spesifikasi alat dan lain-lain.
BAB V: PENUTUP
Sebagai bab terakhir penulis akan menguraikan beberapa kesimpulan dari uraian bab-bab sebelumnya, dan penulis akan berusaha memberikan saran yang mungkin bermanfaat.
BAB II
LANDASAN TEORI
2.1 Hardware Arduino
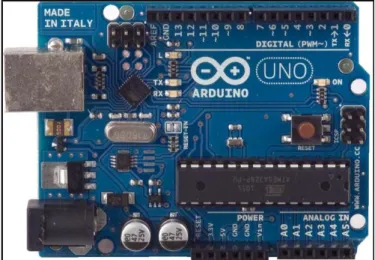
Papan Arduino merupakan papan mikrokontroler yang berukuran kecil atau dapat diartikan juga dengan suatu rangkaian berukuran kecil yang didalamnya terdapat komputer berbentuk suatu chip yang kecil.Arduino didefinisikan sebagai sebuah platform elektronik yang open source, berbasis pada software dan hardware yang fleksibel dan mudah digunakan, yang ditujukan untuk seniman, desainer, hobbies dan setiap orang yang tertarik dalam membuat objek atau lingkungan yang interaktif. Arduino pada awalnya dikembangkan di Ivrea, Italia.
Bahasa pemrograman arduino adalah bahasa pemrograman yang umum digunakan untuk membuat perangkat lunak yang ditanamkan pada arduino board.Pada Gambar dibawah dapat dilihat sebuah papan Arduino dengan beberapa bagian komponen didalamnya.
Gambar 2.1 Hardware Arduino Pada hardware arduino terdiri dari 20 pin yang meliputi:
a. 14 pin IO Digital (pin 0–13)
Sejumlah pin digital dengan nomor 0–13 yang dapat dijadikan input atau output yang diatur dengan cara membuat program IDE.
b. 6 pin Input Analog (pin 0–5)
Sejumlah pin analog bernomor 0–5 yang dapat digunakan untuk membaca nilai input yang memiliki nilai analog dan mengubahnya ke dalam angka antara 0 dan 1023.
c. 6 pin Output Analog (pin 3, 5, 6, 9, 10 dan 11)
Sejumlah pin yang sebenarnya merupakan pin digital tetapi sejumlah pin tersebut dapat diprogram kembali menjadi pin output analog dengan cara membuat programnya pada IDE.
Papan Arduino Uno dapat mengambil daya dari USB port pada komputer dengan menggunakan USB charger atau dapat pula mengambil daya dengan menggunakan suatu AC adapter dengan tegangan 9 volt. Jika tidak terdapat power supply yang melalui AC adapter, maka papan Arduino akan mengambil daya dari USB port.
Tetapi apabila diberikan daya melalui AC adapter secara bersamaan dengan USB port maka papan Arduino akan mengambil daya melalui AC adapter secara otomatis.
2.2 Software Arduino
Software arduino yang digunakan adalah driver dan IDE, walaupun masih ada beberapa software lain yang sangat berguna selama pengembangan arduino.
IDE atau Integrated Development Environment suatu program khusus untuk suatu komputer agar dapat membuat suatu rancangan atau sketsa program untuk papan Arduino.IDE arduino merupakan software yang sangat canggih ditulis dengan menggunakan java. IDE arduino terdiri dari:
1. Editor Program
Sebuah window yang memungkinkan pengguna menulis dan mengedit program dalam bahasa processing
2. Compiler
Sebuah modul yang mengubah kode program menjadi kode biner bagaimanapun sebuah mikrokontroler tidak akan bisa memahami bahasa processing.
3. Uploader
Sebuah modul yang memuat kode biner dari komputer ke dalam memory di dalam papan Arduino
Dalam bahasa pemrograman arduino ada tiga bagian utama yaitu :
a. Struktur Program Arduino 1) Kerangka Program
Kerangka program arduino sangat sederhana, yaitu terdiri atas dua blok.
Blok pertama adalah void setup() dan blok kedua adalah void loop.
Blok Void setup () : Berisi kode program yang hanya dijalankan sekali sesaat setelah arduino dihidupkan atau di-reset. Merupakan bagian persiapan atau instalasi program.
Blok void loop() : Berisi kode program yang akan dijalankan terus menerus. Merupakan tempat untuk program utama.
2) Sintaks Program
Baik blok void setup loop () maupun blok function harus diberi tanda kurung kurawal buka “{“ sebagai tanda awal program di blok itu dan kurung kurawal tutup “}” sebagai tanda akhir program.Variabel adalah sebuah program secara garis besar dapat didefinisikan sebagai instruksi untuk memindahkan angka dengan cara yang cerdas dengan menggunakan sebuah varibel.
Pada proses Uploader dimana pada proses ini mengubah bahasa pemrograman yang nantinya dicompile oleh avr-gcc (avr-gcc compiler) yang hasilnya akan disimpan kedalam papan arduino.Avr-gcc compiler merupakan suatu bagian penting untuk software bersifat open source. Dengan adanya avr-gcc compiler, maka akan membuat bahasa pemrogaman dapat dimengerti oleh mikrokontroler. Proses terakhir ini sangat penting, karena dengan adanya proses ini maka akan membuat proses pemrogaman mikrokontroler menjadi sangat mudah.Berikut ini merupakan gambaran siklus yang terjadi dalam melakukan pemrogaman Arduino:
1. Koneksikan papan Arduino dengan komputer melalui USB port.
2. Tuliskan sketsa rancangan suatu program yang akan dimasukkan ke dalam papan Arduino.
3. Upload sketsa program ke dalam papan Arduino melalui kabel USB dan kemudian tunggu beberapa saat untuk melakukan restart pada papan Arduino.
4. Papan Arduino akan mengeksekusi rancangan sketsa program yang telah dibuat dan di-upload ke papan Arduino.
2.3 Sumber Daya dan Pin Tegangan Arduino
Arduino uno dapat diberi daya melalui koneksi USB (Universal Serial Bus) atau melalui power supply eksternal. Jika arduino uno dihubungkan ke kedua sumber daya tersebut secara bersamaan maka arduino uno akan memilih salah satu sumber daya secara otomatis untuk digunakan. Power supplay external (yang bukan melalui USB) dapat berasal dari adaptor AC ke DC atau baterai.Adaptor dapat dihubungkan ke soket power pada arduino uno. Jika menggunakan baterai, ujung kabel yang dibubungkan ke baterai dimasukkan kedalam pin GND dan Vin yang berada pada konektor POWER.
Arduino uno dapat beroperasi pada tegangan 6 sampai 20 volt. Jika arduino uno diberi tegangan di bawah 7 volt, maka pin 5V akan menyediakan tegangan di bawah 5 volt dan arduino uno munkin bekerja tidak stabil. Jika diberikan tegangan melebihi 12 volt, penstabil tegangan kemungkinan akan menjadi terlalu panas dan merusak arduino uno. Tegangan rekomendasi yang diberikan ke arduino uno berkisar antara 7 sampai 12 volt.
2.4 Power
ArduinoUno dapat diaktifkan melalui koneksi USB atau dengan satu daya eksternal. Sumber daya dipilih secara otomatis.Eksternal(non-USB) dapat di ambil baik berasaldari AC ke adaptor DC ataubaterai. Adaptor ini dapat dihubungkan dengan menancapkan plug jack pusat-positif ukuran 2.1mm konektor POWER.
Ujung kepala dari baterai dapat dimasukkan kedalam Gnd dan Vin pin header dari konektor POWER.Kisaran kebutuhan daya yang disarankan untuk board Uno adalah7 sampai dengan 12 volt, jika diberi daya kurang dari 7 volt kemungkinan pin 5v Uno dapat beroperasi tetapi tidak stabil kemudian jikadiberi daya lebih dari 12V, regulator tegangan bisa panas dan dapat merusak board Uno. VIN. Tegangan masukan kepada board Arduino ketika itu menggunakan sumber daya eksternal (sebagai pengganti dari 5 volt koneksi USB atau sumber daya lainnya).5V. Catu daya digunakan untuk daya mikrokontroler dan komponen lainnya3v3. Sebuah pasokan 3,3 volt dihasilkan oleh regulator on-board. GND. Ground pin.
2.5 Sensor HC-SR04
Sensor HC-SR04 adalah sensor pengukur jarak berbasis gelombang ultrasonik.
Prinsip kerja sensor ini mirip dengan radar ultrasonik. Gelombang ultrasonik di pancarkan kemudian di terima balik oleh receiver ultrasonik. Jarak antara waktu pancar dan waktu terima adalah representasi dari jarak objek. Sensor ini cocok untuk aplikasi elektronik yang memerlukan deteksi jarak termasuk untuk sensor pada robot.
Sensor ini merupakan sensor ultrasonik siap pakai, satu alat yang berfungsi sebagai pengirim, penerima, dan pengontrol gelombang ultrasonik. Alat ini bisa digunakan untuk mengukur jarak benda dari 2cm - 4m dengan akurasi 3mm. Alat ini memiliki 4 pin, pin Vcc, Gnd, Trigger, dan Echo. Pin Vcc untuk listrik positif dan Gnd untuk ground-nya. Pin Trigger untuk trigger keluarnya sinyal dari sensor dan pin Echo untuk menangkap sinyal pantul dari benda.
Gelombang ultrasonik adalah gelombang bunyi yang mempunyai frekuensi sangat tinggi yaitu 20.000 Hz. Bunyi ultrasonik tidak dapat di dengar oleh telinga manusia.Bunyi ultrasonik dapat didengar oleh anjing, kucing, kelelawar, dan lumba-lumba.Bunyi ultrasonik nisa merambat melalui zat padat, cair dan gas.
Reflektivitas bunyi ultrasonik di permukaan zat padat hampir sama dengan reflektivitas bunyi ultrasonik di permukaan zat cair. A kan tetapi, gelombang bunyi ultrasonik akan diserap oleh tekstil dan busa.
Gambar 2.2 Sensor HC-SR04
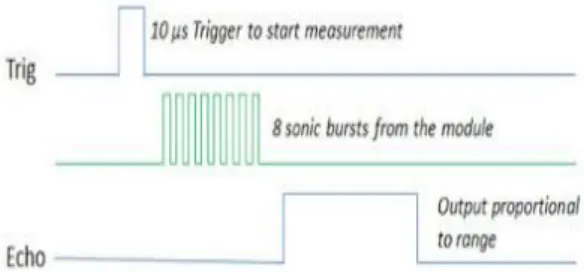
Cara menggunakan alat ini yaitu: ketika kita memberikan tegangan positif pada pin Trigger selama 10uS, maka sensor akan mengirimkan 8 step sinyal ultrasonik dengan frekuensi 40kHz. Selanjutnya, sinyal akan diterima pada pin Echo. Untuk mengukur jarak benda yang memantulkan sinyal tersebut, maka selisih waktu ketika mengirim dan menerima sinyal digunakan untuk menentukan
jarak benda tersebut.
Gambar 2.3 Sistem pewaktu pada sensor HC-SR04
Pada sensor ultrasonik, gelombang ultrasonik dibangkitkan melalui sebuah alat yang disebut dengan piezoelektrik dengan frekuensi tertentu. Piezoelektrik ini akan menghasilkan gelombang ultrasonik (umumnya berfrekuensi 40kHz) ketika sebuah osilator diterapkan pada benda tersebut. Secara umum, alat ini akan menembakkan gelombang ultrasonik menuju suatu area atau suatu target. Setelah gelombang menyentuh permukaan target, maka target akan memantulkan kembali gelombang tersebut. Gelombang pantulan dari target akan ditangkap oleh sensor, kemudian sensor menghitung selisih antara waktu pengiriman gelombang dan waktu gelombang pantul diterima. Gambar cara kerja sensor ultrasonik dengan transmitter dan receiver (atas), sensor ultrasonik dengan single sensor yang berfungsi sebagai transmitter dan receiver sealigus oleh transmitter dan waktu ketika gelombang pantul diterima receiver.
2.6 Prinsip Kerja Sensor HC-SR04
Secara detail, cara kerja sensor ultrasonik adalah sebagai berikut:
Sinyal dipancarkan oleh pemancar ultrasonik dengan frekuensi tertentu dan dengan durasi waktu tertentu. Sinyal tersebut berfrekuensi diatas 20kHz.
Untuk mengukur jarak benda (sensor jarak), frekuensi yang umum digunakan adalah 40kHz.
Sinyal yang dipancarkan akan merambat sebagai gelombang bunyi dengan kecepatan sekitar 340 m/s. Ketika menumbuk suatu benda, maka sinyal tersebut akan dipantulkan oleh benda tersebut.
Setelah gelombang pantulan sampai di alat penerima, maka sinyal tersebut akan diproses untuk menghitung jarak benda tersebut. Jarak benda dihitung berdasarkan rumus : S = 340.t/2 dimana S merupakan jarak antara sensor
ultrasonik dengan benda (bidang pantul), dan t adalah selisih antara waktu pemancaran gelombang.
2.7 LCD (Liquid Crystal Display)
LCD (Liquid Crystal Display) adalah suatu jenis media tampil yang menggunakan kristal cair sebagai penampil utama. LCD sudah digunakan diberbagai bidang misalnya alal–alat elektronik seperti televisi, kalkulator, ataupun layar komputer. Pada bab ini aplikasi LCD yang dugunakan ialah LCD dot matrik dengan jumlah karakter 2 x 16. LCD sangat berfungsi sebagai penampil yang nantinya akan digunakan untuk menampilkan status kerja alat. Adapun fitur yang disajikan dalam LCD ini adalah :
1. Terdiri dari 16 karakter dan 2 baris.
2. Mempunyai 192 karakter tersimpan.
3. Terdapat karakter generator terprogram 4. Dapat dialamati dengan mode 4-bit dan 8-bit 5. Dilengkapi dengan back light.
6. Tersedia VR untuk mengatur kontras.
7. Pilihan konfigurasi untuk operasi write only atau read/write.
8. Catu daya +5 Volt DC dan Kompatibel dengan DT-51 dan DT-AVR Low Cost Series serta sistem mikrokontroler/mikroprosesor lain.
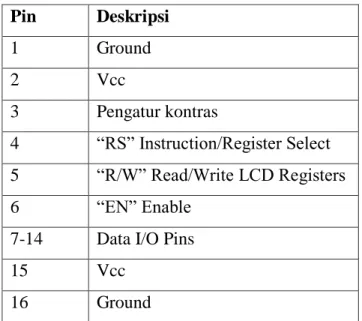
Gambar 2.4 LCD (Liquid Crystal Display) Adapun konfigurasi dan deskripsi dari pin-pin LCD antara lain:
1. Pin 1 dihubungkan ke Gnd 2. Pin 2 dihubungkan ke Vcc +5V
3. Pin 3 dihubungkan ke bagian tegangan potensiometer 10KOhm sebagai pengatur kontras.
4. Pin 4 untuk membritahukan LCD bahwa sinyal yang dikirim adalah data, jika Pin 4 ini diset ke logika 1 (high, +5V), atau memberitahukan bahwa sinyal yang dikirim adalah perintah jika pin ini di set ke logika 0 (low, 0V).
5. Pin 5 digunakan untuk mengatur fungsi LCD. Jika di set ke logika 1 (high, +5V) maka LCD berfungsi untuk menerima data (membaca data). Dan fungsi untuk mengeluarkan data, jika pin ini di set ke logika 0 (low, 0V). Namun kebanyakan aplikasi hanya digunakan untuk menerima data, sehingga pin 5 ini selalu dihubungkan ke Gnd.
6. Pin 6 adalah terminal enable. Berlogika 1 setiap kali pengiriman atau pembaca data.
7. Pin 7 – Pin 14 adalah data 8 bit data bus (Aplikasi ini menggunakan 4 bit MSB saja, sehingga pin data yang digunkan hanya Pin 11 – Pin 14).
8. Pin 15 dan Pin 16 adalah tegangan untuk menyalakan lampu LCD.
Tabel 2.1 Deskripsi Pin Pada LCD Pin Deskripsi
1 Ground
2 Vcc
3 Pengatur kontras
4 “RS” Instruction/Register Select 5 “R/W” Read/Write LCD Registers
6 “EN” Enable
7-14 Data I/O Pins
15 Vcc
16 Ground
Cara kerja LCD (Liquid Crystal Display) pada aplikasi umumnya RW diberi logika rendah “0”.Bus data terdiri dari 4-bit atau 8-bit.Jika jalur data 4-bit maka yang digunakan ialah DB4 sampai dengan DB7. Sebagaimana terlihat pada table diskripsi, interface LCD merupakan sebuah parallel bus, dimana hal ini sangat memudahkan dan sangat cepat dalam pembacaan dan penulisan data dari atau ke LCD. Kode ASCII yang ditampilkan sepanjang 8-bit dikirim ke LCD secara 4-bit atau 8 bit pada satu waktu.
2.8 Resistor
Resistor adalah komponen dasar elektronika yang digunakan untuk membatasi jumlah arus yang menaglir dalam suatu rangkaian.Sesuai dengan namanya resistor bersifat resistif dan umumnya terbuat dari bahan karbon.Dalam hukum ohm diketahui bahwa resistansi berbanding terbalik dengan jumlah arus yang mengalir melaluinya.Satuan dari resistansi dari resistor disebut Ohm atau dilambangkan dengan (Omega).
Gambar 2.5 Gambar dan Lambang Resistor
Resistor umumnya berbentuk tabung dengan dua kaki tembaga dikiri dan kana.
Dibadannya terdapat lingkaran berbentuk gelang kode warna yang memudahkan pemakai mengenali besar resistansi tanpa mengukur besarannya tanpa menggunakan Ohm meter.
2.9 PCB (Printed Circuit Board)
PCB Printed Circuit Board adalah sebuah papan yang penuh dengan komponen-komponen elektronika yang tersusun membentuk rangkaian elektronik atau tempat rangkaian elektronika yang menghubungkan komponen elektronik yang satu dengan lainnya tanpa menggunakan kabel. Disebut dengan Papan Sirkuit karena diproduksi secara massal dengan cara mencetak. PCB dilapisi lapisan logam (tembaga) yang berfungsi sebagai penghubung antar komponen, Lapisan logam ini nantinya akan menjadi kabel yang tersusun rapi, setelah kita melarutkan pada larutan Ferry Clorit + air.
Sejarah terciptanya PCB : Tahun 1936 - Papan sirkuit cetak pertama kali ditemukan oleh Paul Eisler, ilmuwan Austria yang memasukkan penggunaan papan sirkuit ini ke dalam sebuah radio. Tahun 1943 - Amerika Serikat menggunakan
papan sirkuit dengan jumlah besar dalam radio militer mereka. Tahun 1948 - Komersialisasi papan sirkuit cetak di Amerika Serikat.Setelah tahun 1950, papan sirkuit cetak telah digunakan secara massal di dalam industri elektronik.
Gambar 2.6 Papan PCB
Resistor variabel adalah sebuah komponen yang mempunyai karakteristik seperti resistor namun nilainya tidak tetap (variabel) dan bisa diubah selama pemakaian.Perubahan nilai resistor ini karena diubah oleh sesuatu dari luar misalnya diputar atau digeser.Perubahan nilai dari resistor variabel biasanya dimanfaatkan untuk mengatur sesuatu yang sifatnya tidak tetap dan bergantung dari kondisi penerapan rangkaian. Ada beberapa jenis resistor variabel seperti trimmer potensiometer (trimpot), slide potensiometer (slidepot) dan rotary potensiometer (potensio).Masing-masing jenis resistor variabel ini memiliki kegunaan dan penerapan yang berbeda-beda. Berikut ini beberapa penggunaan resistor variabel yang umum pada aplikasi sehari-hari :
1. Volume Control
2. Tone Control (Bass, Middle dan Treble) 3. Pengaturan tegangan dan arus
4. Pengaturan ukuran layar pada televisi analog 5. Setting referensi tegangan atau sinyal
6. Kontrol parameter alat seperti cahaya, kecepatan, frekuensi dan sebagainya.
Resistor variabel pada umumnya digambarkan menyerupai simbol resistor dengan tanda panah ditengahnya.Karena kebanyakan resistor variabel berkaki tiga maka panah yang berada ditengah merupakan kaki ketiga yang berada ditengah dengan nilai resistansi yang berubah-ubah terhadap kaki pinggir.Perubahan nilai resistor ini tergantung pada posisi kaki tengah terhadap kaki pinggir.
Nilai resistansi antara kaki pinggir merupakan nilai yang tertera pada body resistor variabel.Misalnya tertulis nilai 10kΩ maka besarnya resistansi antara kaki pinggir selalu tetap sebesar 10kΩ.Kemudian nilai resistansi antara kaki tengah dengan kaki pinggir berubah (variabel) sesuai dengan posisi kaki tengah terhadap kaki pinggir.Jika posisi potensio berana pada kiri penuh maka besarnya resistansi kaki tengah dengan kaki sebelah kiri sama dengan nol dan besarnya resistansi kaki tengah dengan kakai sebelah kanan sebesar 10kΩ. Dan sebaliknya saat posisi kanan penuh maka besarnya resistansi kaki tengah dengan kaki sebelah kanan sama dengan nol dan besarnya resistansi kaki tengah dengan kaki sebelah kiri sebesar 10 kΩ. Sering disingkat dengan trimpot.Adalah jenis resistor variabel yang diputar dengan obeng.Area putar dari trimpot berupa lekukan berbentuk tanda plus atau minus seperti pada kepala skrup.
2.10 LED (Light Emiting Dioda)
Led adalah jenis dioda yang memancarkan cahaya.Komponen ini biasa digunakan pada lampu senter atau lampu emergensi. Seperti hal nya dioda yang hanya mengalirkan arus listrik dari satu arah, led juga demikian. Itulah sebab nya, pemasangan led dirangkaian elektronika harus tidak terbalik. Dengan kata lain, led tidak berfungsi jika dipasang terbalik.Led yang umum dipakai berkaki dua. Salah satu kaki berkutub + (disebut anoda) dan yang lain adalah – (disebut katoda).
Namun, tidak tanda + atau – secara eksplisit.Pembedanya, led mempunyai kaki dengan panjang berbeda. Kaki yang panjang adalah anoda dan yang pendek adalah katoda.Sekiranya anda menemukan kaki led yang sudah terpotong sehingga kedua panjang kaki tidak bias dibedakan, indikasi yang menyatakan anoda atau katoda masih bias dilakukan.
Gambar 2.10 Bentuk Fisik LED
BAB III
PERANCANGAN ALAT DAN PEMBUATAN SISTEM
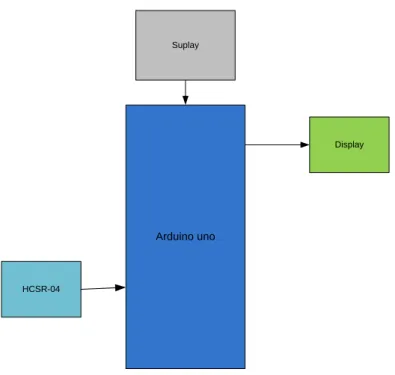
3.1. Diagram Blok Rangkaian
Arduino uno
Suplay
Display
HCSR-04
Gambar 3.1 Diagram Blok Dari Rangkaian Fungsi Setiap Blok
Blok Suplay : Sebagai Sumber Tegangan sensor HCSR-04 : Sebagai Pembaca ketebalan kayu
arduino uno : Sebagai media pengkonversi waktu, dan mengkonversi data menjadi jarak.
Blok display : Sebagai output tampilan instruksi dari arduino.
3.2 Prinsip Kerja Alat
Alat ukur tingkat keasaman ini menggunakan Sensor HCSR-04 berbasis Arduino sebagai pusat kendalinya, Sensor HCSR-04 sebagai sensor sedangkan LCD sebagai penampil-nya. Alat ini bekerja secara otomatis dengan merespon berapa besar ketebalan kayu yang dideteksi Sensor HCSR-04 oleh. Arduino
kemudian memproses dan memberikan output yang telah diprogram sebelumnya.
Hasil pengukuran ini kemudian ditampilkan pada LCD..
3.3 Rangkaian LCD
LCD adalah suatu display dari bahan cairan kristal yang pengobrasiannya menggunakan sistem dot matriks. LCD banyak digunakan sebagai display alat-alat elektronika seperti kalkulator, multitester digital, jam digital dan sebagainya.
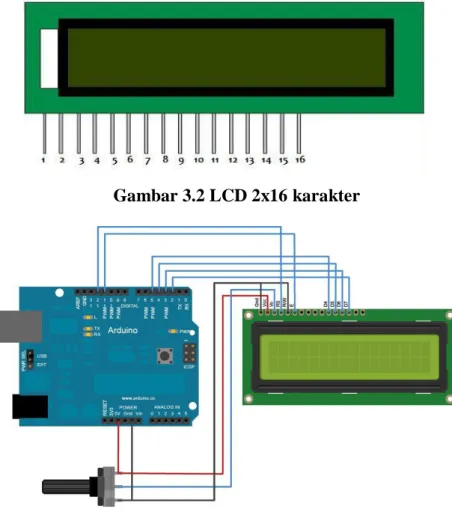
Gambar 3.2 LCD 2x16 karakter
Gambar 3.3 Skematik Rangkaian LCD
Dari gambar 3.2, Rangkaian LCD dapat dengan mudah dihubungkan dengan mikrokontroler Arduino Uno. LCD yang digunakan dalam percobaan adalah LCD 2 x 16, lebar display 2 baris 16 kolom, yang mempunyai 16 pin konektor, sehingga hanya mampu menampilkan angka, huruf, dan simbol sebanyak 2 baris dan disetiap baris mampu menampilkan 16 karakter. Pin-pin pada LCD terhubung langsung ke pin-pin Arduino. Dimana pin VSS dan VDD pada LCD terhubung ke pin VCC dan GND Arduino, pin VEE terhubung ke resistor variabel untuk mengatur kecerahan
LCD, pin RS terhubung ke pin 7, pin RW terhubung ke pin ground, pin E terhubung ke pin 6, kaki D4 dan D5 terhubung ke pin 5 dan 4, kaki D6 dan D7 terhubung ke pin 3 dan 8.Skematik LCD terhubung ke Arduino.
3.4 Prosedur Penelitian
Langkah-langkah dalam Perancangan Alat Ukur Ketebalan Kayu Dengan Menggunakan Sensor HCSR-04 Dan Tampilan LCD Berbasis Arduino terdapat 6 hal yaitu perancangan konsep, menyiapkan alat dan bahan dalam perancangan alat ukur ketebalan kayu, merancang hardware alat ukur ketebalan kayu seperti rangkaian arduino, LED, resistor, LCD, Trimpot dan Sensor HCSR-O4.
Merancang program (software) dan mendownload program ke arduino.
Melakukan percobaan pengukuran hasil dari pengukuran Ketebalan kayu dan membuat laporan penelitian.
3.5 Diagram Alir (Flowchart) Alat Ukur ketebalan Kayu
Tidak
Ya
Gambar 3.4. Flowchart Cara Kerja Sistem
Mulai
INISIALISASI PIN
BACA SENSOR HCSR-04
PEMBACAAN KAYU= X- PEMBACAAN SENSOR
TAMPILAN HASIL PEMBAAAN DALA CM
SELESAI
Keterangan : Pada proses inisialisasi pin, arduino akan membaca sensor HC-SR04 dengan echo mengirimkan sinya digital dan trigger menerima pantulan sinyal digital tersebut maka dapat diketahui berapa ketinggian benda . ketinggian benda terukur di kurangkan dengan total ketinggian kayu. Hasil yang didapat ditampilkan ke LCD dengan satuan centimeter (cm).
BAB IV
PENGUJIAN DAN HASIL RANGKAIAN
Pengujian pengukuran dilakukan terhadap beberapa sampel, dimana hasil pengukuran yang terbaca berupa panjang pantulan signal digital. Nilai yang terbaca akan dikonversikan menjadi logika 0/1 dan logika ini akan di hitung menggunakan pencacah yg terdapat pada arduino, kemudian nilai tersebut akan dikonversikan menjadi satuan jarak dalam satuan centimeter. Pengujian ini dilakukan di :
Tempat : Gedung Unit 8 FMIPA-USU Tanggal : 18 Juni 2018
Waktu / Pukul : 15.15 – 15.45 WIB
Pengujian dilakukan dengan metode pengukuran langsung dari suatu titik yang diukur ke titik akhir dengan membandingkan nilai pada standar dengan penunjukan pada alat ukur yang akan diuji. Standar berupa mistar dengan ketelitian hingga 0.5 milimeter dan maximal pengukuran sampai 30 cm. Pengujian pengukuran dilakukan sebanyak 3 kali.
Dibawah ini merupakan tabel data hasil percobaan alat pada interval jarak 2, 5, dan 6 centimeter dan hasil pengukuran di hitung untuk mencari nilai rata – ratanya untuk mendapatkan nilai ketepatan dari hasil pengukuran.
4.1 Data Percobaan
Data percobaan dari hasil pengukuran Alat Ukur Ketebalan Kayu dengan Menggunakan Sensor HCSR-04 dan Tampilan LCD Berbasis Arduino Uno yang dibandingkan dengan Mistar.
Tabel 4.1 Data Pecobaan Hasil Pengukuran
Pengujian keseluruhan sistem alat ukur ketebalan kayu pada sampel dengan menghitung persentase Kesalahan Relatif (KR) hasil pengukuran alat yang telah dibuat dari hasil pengukuran alat pembanding ketebalan kayu, adapun rumus yang digunakan adalah:
% KR =
Percobaan Sampel 1:
Percobaan Sampel 2:
Percobaan Sampel 3:
Percobaan Sampel 4 :
Percobaan Sampel 5 :
Sampel Alat Standar Ketebalan Kayu (cm)
Alat Ketebalan Kayu Yang dibuat (cm)
1. 4 4.2
2. 6 6.2
3. 8 8.2
4. 10 10
5. 15 15
4.2 Pengujian Keseluruhan
// ---
// Example NewPing library sketch that does a ping abo ut 20 times per second.
// ---
#include <NewPing.h>
#include <LiquidCrystal.h>
// initialize the library with the numbers of the interface pins LiquidCrystal lcd(2,3,4,5,6,7,8);
#define TRIGGER_PIN A4 // Arduino pin tied to trigger pin on the ultrasonic sensor.
#define ECHO_PIN A5 // Arduino pin tied to echo pin on the ultrasonic sensor.
#define MAX_DISTANCE 200 // Maximum distance we want to ping for (in centimeters). Maximum sensor distance is rated at 400-500cm.
NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE); // NewPing setup of pins and maximum distance.
double a[3];
void setup() {
Serial.begin(9600); // Open serial monitor at 115200 baud to see ping results.
// set up the LCD's number of columns and rows:
lcd.begin(16, 2);
lcd.setCursor(0, 0);
lcd.print("PROJEK AKHIR 2");
lcd.setCursor(0, 1);
lcd.print("METROLOGI & INST");
delay(3000);
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("STEVANY");
lcd.setCursor(0,1);
lcd.print("LOURENTIA");
delay(3000);
lcd.clear();
lcd.setCursor(4, 0);
lcd.print("ALAT UKUR");
lcd.setCursor(4,1);
lcd.print("KETEBALAN");
delay(2000);
lcd.clear();
}
void loop() {
float uS = sonar.ping(); // Send ping, get ping time in microseconds (uS).
float jarak=(uS/US_ROUNDTRIP_CM);
//Serial.print(uS / US_ROUNDTRIP_CM); // Convert ping time to distance in cm and print result (0 = outside set distance range)
int tinggi=(32-jarak);
if (tinggi<-0.00) tinggi=0.00;
lcd.setCursor(3, 0);
lcd.print ("ketebalan");
lcd.setCursor(4, 1);
lcd.print (tinggi);
lcd.print (" cm ");
delay(2000);
lcd.clear();
}
Gambar 4.1 Aplikasi Arduino
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan
1. Hasil pengukuran menunjukkan rata - rata pada interval jarak 4,6,8,10 dan 15 centimeter , untuk satuan centimeter kesalahan rata - rata pada setiap interval tidak lebih dari 1 %. Batas minimal pengukuran hanya mencapai ketelitian 1 centimeter pada alat uji.
2. Alat ukur ketebalan kayu ini menggunakan sensor HCSR-04 berbasis Arduino Uno sebagai pusat kendalinya, sensor HCSR-04 sebagai sensor jarak yang akan mengukur ketebalan kayu sedangkan LCD sebagai penampil-nya.
3. Alat ini bekerja secara otomatis dengan merespon berapa besar tebal kayu yang dideteksi oleh sensor HCSR-04 berbasis Arduino-Uno kemudian diproses dan memberikan output yang telah diprogram sebelumnya. Hasil pengukuran ini kemudian ditampilkan pada LCD.
5.2 Saran
1. Disarankan alat uji ini dikembangkan menggunakan android
2. Untuk perancangan alat berikutnya disarankan untuk menggunakan sensor yang lebih sensitif dan fokus terhadap jarak.
3. Disarankan untuk membuat rangkaian lebih baik dan program yang lebih spesifik sehingga dapat di aplikasikan ke penggunaan yang lain.
DAFTAR PUSTAKA
Tarigan, Pernantin. 2011. Sistem Tertanam (Embedded System). Graha Ilmu.
Yogyakarta.
Canara Dani.2012.Artikel sensor ultrasonic.UNY.Yogyakarta Hidayat Dayat.2015. Pengertian Arduino Uno.Surabaya Wesly.2008.Prinsip Kerja HCSR-04.Jakarta
http://eprints.uny.ac.id/6833/1/ARTIKEL...pdf Diakses pada tanggal 20 Desember 2017
https://www.google.com/search?q=prinsip+kerja+HCSR-04&ie=utf-8&oe=utf-8 Diakses pada tanggal 26 Desember 2017
http://dayatarduino.blogspot.co.id/2015/01/pengertian-arduino-uno.html Diakses pada tanggal 20 Desember 2017
http://repository.usu.ac.id/bitstream/123456789/61952/3/Chapter%20II.pdf Diakses pada : 29 Juni 2018
http://www.arduino.web.id/2012/03/belajar-arduino-dan-lcd.html Diakses pada : 29 Juni 2018
https://ryankudeta.wordpress.com/2012/12/17/pengertian-photodioda/
Diakses pada : 29 Juni2018
http://elektronika-dasar.web.id/operasional-amplifier-op-amp-ic-lm741/
Diakses pada : 01 Juli 2018
http://science-student14.blogspot.co.id/2015/03/pengertian-dan-penjelasan- tentang.html
Diakses pada : 01 Juli 2018
http://ulaslistrik.blogspot.co.id/2015/12/relay-adalah-saklar-elektronikyang.html Diakses pada : 02 Juli 2018
https://id.wikipedia.org/wiki/Transistor Diakses pada : 03 Juli 2018
LAMPIRAN I
(DATA SHEET ARDUINO-
UNO)
DATA SHEET ARDUINO
Arduino
Arduino is an open-source electronics design platform. The Arduino board is specially designed for programming and prototyping with Atmel microcontrollers.
An arduino interacts with physical world via sensors. Using arduino; electric equipments can be designed to respond to change in physical elements like temperature, humidity, heat or even light. [5] This is the automation process. For example, reading a humidity sensor and turning on and off of an automatic irrigation system. There several types of arduino boards. The open-source Arduino environment allows one to write code and load it onto the Arduino board's memory. The development environment is written in Java and based on Processing, AVR-GCC, and other open source software. [5] The Arduino programming language is an implementation of Wiring, a similar physical computing platform, which is based on the Processing multimedia programming environment. The arduino software is published as open source tools, available for extension by experienced programmers. The language can be expanded through C++ libraries, and people wanting to understand the technical details can make the leap from Arduino to the AVR C programming language on which it's based. Similarly, AVR-C code can be added directly into the Arduino programs if one so wishes.
Types of arduino boards Legacy Versions
Arduino legacy versions include Arduino NG, Diecimila, and the Duemilanove.
These arduinos use ATMEGA168 chips. They require manual selection of either USB or battery power.[5] For Arduino NG one is required to hold the rest button on the board for a few seconds before uploading a program on to it.
Figure 2.14 Different types of arduino
Arduino Uno
This is the most common arduino type. This arduino type uses ATmega328 AVR microcontroller.
Figure 2.15 Parts of arduino uno ATmega328 is more preferred due to the following features:
a. Have three 8-bit bi-directional I/O ports with internal pull-up resistors.[5]
b. 32K Bytes of flash memory.
c. 1K Bytes EEPROM d. 2K Bytes of RAM
e. 2 instruction words/vector.
f. 8-channel 10-bit successive approximation ADC g. Programmable Serial USART
h. 23 Programmable I/O Lines i. Operating Voltage 1.8 - 5.5Ve.t.c
Figure 2.16 Atmega 328 microcontroller pin configuration
2.2.3.2 Arduino Mega 2560
This is regarded as an advancement of arduino uno. It has more memory than arduino uno. It has a total of 54 input pins of which 16 are analog inputs. It has a larger PCB board than arduino. Overall it is more powerful than arduino uno. This arduino board is based on ATmega2560.
2.2.3.3 Arduino LilyPad
This arduino board is designed for wearable applications. It is usually sewn on fabric. This board requires the use of a special FTDI-USB TTL serial programming cable. Arduino LilyPad is used to design "smart" wearable.
2.2.3.4 Arduino Mega ADK
This arduino board is specifically designed to interact with android devices.
The system has three major parts; humidity sensing part, control section and the output section. The soil humidity was detected using YL-69 soil sensor (a resistance type sensor). The control unit was achieved using ATMega328 microcontroller based on arduino platform. The output was the control unit was used to control the irrigation system by switching it on and off depending on the soil moisture contents. Two stages of design were undertaken; hardware and software.
3.1 Hardware design
3.1.1 Control Unit: ATMega328 microcontroller on arduino platform
ATMega328 microcontroller on arduino platform was selected the control unit of the microcontroller. Arduino Uno was selected from the expansive arduino family.
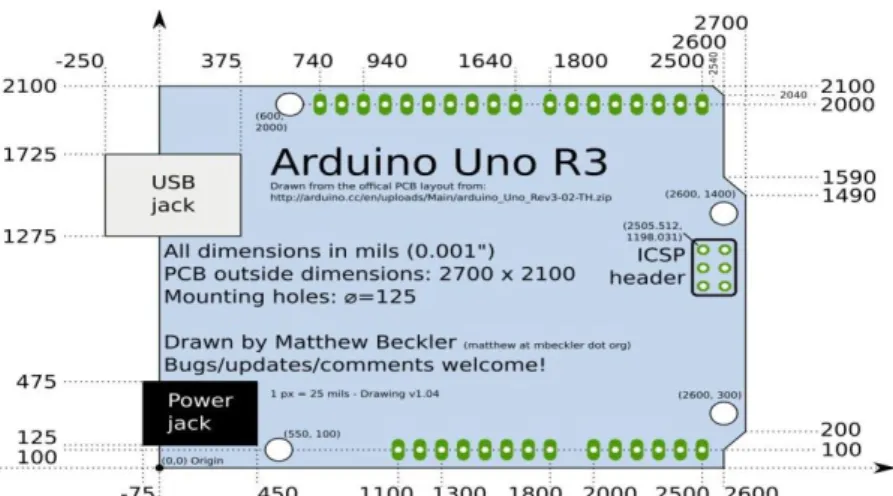
Arduino Uno has a total of 20 inputs pins of which 14 are digital and 6 are analog inputs. [5] The digital pins can be used as either inputs or outputs and also 6 of the 14 pins can be utilized as PMW. The board has a 16 MHz ceramic resonator, a USB connection and a power jack.
Figure 3.1 Arduino Uno
In the design of the system analog pins were selected as the arduino input and digital pin was selected as the arduino output pins.
Other important pins on the arduino board are shown in the table below.
AREF Analog Reference pin
GND(Digital side) Digital Ground
Vin Input voltage (external power source) 5V Regulated power to the microcontroller 3.3V 3.3V generated by the on-board FTDI chip
GND Ground
Table 3-1 Important pins in arduino
The pins on the arduino were selected as shown below.
Pin Connections
Digital pin 2 LCD D7 pin Digital pin 3 LCD D6 pin Digital pin 4 LCD D5 pin Digital pin 5 LCD D4 pin Digital pin 11 LCD Enable Digital pin 12 LCD RS pin
Digital pin 7 Connection to Water Pump Digital pin 8 LED Pin indicating Soggy soil Digital pin 9 LED Pin indicating Moist soil Digital pin 10 LED Pin indicating Dry soil
Analog Pin 4 Connection to Soil Moisture Sensor
VCC 5VDC
GND Ground
Table 3-2 Selected pins on arduino
LAMPIRAN II
(DATA SHEET SENSOR HC-
SR04)
DATA SHEET SENSOR HC-SR04
Ultrasonic Ranging Module HC - SR04 Product features:
Ultrasonic ranging module HC - SR04 provides 2cm - 400cm non-contact measurement function, the ranging accuracy can reach to 3mm. The modules includes ultrasonic transmitters, receiver and control circuit. The basic principle of work:
(1) Using IO trigger for at least 10us high level signal
(2) The Module automatically sends eight 40 kHz and detect whether there is a pulse signal back.
(3) IF the signal back, through high level , time of high output IO duration is the time from sending ultrasonic to returning. Test distance = (high level time×velocity of sound (340M/S) / 2,
Wire connecting direct as following:
5V Supply
Trigger Pulse Input Echo Pulse Output 0V Ground
Electric Parameter
Picture. Sensor HCSR-04
Timing diagram
The Timing diagram is shown below. You only need to supply a short 10uS pulse to the trigger input to start the ranging, and then the module will send out an 8 cycle burst of ultrasound at 40 kHz and raise its echo. The Echo is a distance object
that is pulse width and the range in proportion .You can calculate the range through the time interval between sending trigger signal and receiving echo signal.
Formula: uS / 58 = centimeters or uS / 148 =inch; or: the range = high level time * velocity (340M/S) / 2; we suggest to use over 60ms measurement cycle, in order to prevent trigger signal to the echo signal.
Picture. Timing Diagram
LAMPIRAN III
(DATA SHEET LCD)
DATA SHEET LCD
LCD (Liquid Crystal Display) screen is an electronic display module and find a wide range of applications. A 16x2 LCD display is very basic module and is very commonly used in various devices and circuits. These modules are preferred over seven segments and other multi segment LEDs. The reasons being: LCDs are economical; easily programmable; have no limitation of displaying special & even custom characters (unlike in seven segments), animations and so on.
A 16x2 LCD means it can display 16 characters per line and there are 2 such lines.
In this LCD each character is displayed in 5x7 pixel matrix. This LCD has two registers, namely, Command and Data.
The command register stores the command instructions given to the LCD. A command is an instruction given to LCD to do a predefined task like initializing it, clearing its screen, setting the cursor position, controlling display etc. The data register stores the data to be displayed on the LCD. The data is the ASCII value of the character to be displayed on the LCD. Click to learn more about internal structure of a LCD.
Pin Diagram:
Pin Description:
Pin
No Function Name
1 Ground (0V) Ground
2 Supply voltage; 5V (4.7V – 5.3V) Vcc
3 Contrast adjustment; through a variable resistor VEE
4 Selects command register when low; and data register when high
Register Select 5 Low to write to the register; High to read from the
register
Read/write 6 Sends data to data pins when a high to low pulse is given Enable 7
8-bit data pins
DB0
8 DB1
9 DB2
10 DB3
11 DB4
12 DB5
13 DB6
14 DB7
15 Backlight VCC (5V) Led+
16 Backlight Ground (0V) Led-
LAMPIRAN IV
(PROGRAM ALAT)
PROGRAM
// ---
// Example NewPing library sketch that does a ping abo ut 20 times per second.
// ---
#include <NewPing.h>
#include <LiquidCrystal.h>
// initialize the library with the numbers of the interface pins LiquidCrystal lcd(2,3,4,5,6,7,8);
#define TRIGGER_PIN A4 // Arduino pin tied to trigger pin on the ultrasonic sensor.
#define ECHO_PIN A5 // Arduino pin tied to echo pin on the ultrasonic sensor.
#define MAX_DISTANCE 200 // Maximum distance we want to ping for (in centimeters). Maximum sensor distance is rated at 400-500cm.
NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE); // NewPing setup of pins and maximum distance.
double a[3];
void setup() {
Serial.begin(9600); // Open serial monitor at 115200 baud to see ping results.
// set up the LCD's number of columns and rows:
lcd.begin(16, 2);
lcd.setCursor(0, 0);
lcd.print("PROJEK AKHIR 2");
lcd.setCursor(0, 2 );
lcd.print("METROLOGI & INST");
delay(3000);
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("STEVANY");
lcd.setCursor(0,1);
lcd.print("LOURENTIA");
delay(3000);
lcd.clear();
lcd.setCursor(4, 0);
lcd.print("ALAT UKUR");
lcd.setCursor(4,1);
lcd.print("KETEBALAN");
delay(2000);
lcd.clear();
}
void loop() {
float uS = sonar.ping(); // Send ping, get ping time in microseconds (uS).
float jarak=(uS/US_ROUNDTRIP_CM);
//Serial.print(uS / US_ROUNDTRIP_CM); // Convert ping time to distance in cm and print result (0 = outside set distance range)
int tinggi=(32-jarak);
if (tinggi<-0.00) tinggi=0.00;
lcd.setCursor(3, 0);
lcd.print ("ketebalan");
lcd.setCursor(4, 1);
lcd.print (tinggi);
lcd.print (" cm ");
delay(2000);
lcd.clear();
}