PENERAPAN MULTI-MIKROKONTROLER PADA
MODEL ROBOT MOBIL BERBASIS LOGIKA FUZI
Nuryono Satya Widodo
Program Studi Teknik Elektro, Fakultas Teknologi Industri, Universitas Ahmad Dahlan Kampus III UAD, Jl. Prof. Dr. Soepomo, Janturan, Yogyakarta, 55161.
Telp. (0274) 379418. Fax. (0274) 381523 e-mail: [email protected]
Abstract
This paper proposed a fuzzy logic based mobile robot as implemented in a multimicrocontroller system. Fuzzy logic controller was developed based on a behavior based approach. The Controller inputs were obtained from seven sonar sensor and three tactile switches. Behavior based approach was implemented in different level priority of behaviors. The behaviors were: obstacle avoidance, wall following and escaping as the emergency behavior. The results show that robot was able to navigate autonomously and avoid the entire obstacle.
Keywords: behavior-based approach, fuzzy logic, multi-microcontroller
Abstrak
Penelitian ini menghadirkan penerapan multi-mikrokontroler pada suatu model robot mobil berbasis logika fuzi untuk perilaku menghindari halangan dan menyusuri dinding. Kendali logika fuzi yang dibangun menggunakan pendekatan berbasis perilaku (behavior-based approach) berdasarkan informasi dari tujuh buah sensor ultrasonik dan tiga buah tactile switch. Pendekatan berbasis perilaku ini dimplementasikan dalam beberapa perilaku individual yang memiliki tingkat prioritas yang berbeda. Adapun perilaku yang dibangun adalah: menghindari rintangan, menyusuri dinding, dan sebuah perilaku darurat melepaskan diri. Hasil penelitian menunjukkan bahwa robot telah mampu bernavigasi pada ruangan dengan berbagai penghalang tanpa menabrak, namun ada kalanya memasuki ruangan yang sama secara berulang.
.
Kata kunci: multi-mikrokontroler, logika fuzi, pendekatan berbasis perilaku
1. PENDAHULUAN
Robot dalam segala bentuk dan fungsinya adalah salah satu hasil kemajuan teknologi yang banyak membantu aktivitas manusia. Penggunaan tersebar dari dunia militer, medis, sampai rumah tangga. Di dunia militer dan penanggulangan bencana, fenomena ini umumnya didasari pada keinginan yang kuat untuk mengurangi jumlah korban jiwa manusia pada berbagai tugas militer. Pada kebutuhan industri dan rumah tangga pada umumnya penggunaan robot didorong oleh keinginan untuk menjadikan robot sebagai pengganti pekerja manusia pada hal-hal yang sesuai dan menuntut untuk hal tersebut. Robot mobil adalah bentuk robot yang paling banyak digunakan pada kebutuhan rumah tangga dan bahkan pada industri. Untuk dapat menjalankan tugasnya maka robot mobil yang dirancang haruslah mampu melakukan hal-hal berikut:
1. Melakukan pergerakan secara autonomous/tanpa dikendalikan operator dengan sistem navigasi yang dimilikinya.
2. Mencari atau mendeteksi obyek atau benda yang menjadi bagian dari tugasnya. 3. Melakukan tindakan terhadap obyek sesuai dengan fungsi dari robot tersebut.
Navigasi sebagai salah satu kemampuan dasar untuk robot tersebut telah menjadi topik yang sering diangkat dalam penelitian robotika [1-2]. Walaupun ada kemungkinan untuk merancang sistem navigasi robot autonomous tanpa sistem kecerdasan, namun robot jenis ini mensyaratkan adanya kondisi tertentu pada lingkungannya agar dapat beroperasi, misalnya robot yang mengikuti garis. Jadi sistem kecerdasan buatan adalah suatu hal yang mutlak ada
dalam robot yang akan digunakan pada suatu daerah kerja yang belum direkayasa untuk penggunaan robot mobil. Berbagai penelitian sebelumnya menunjukkan bahwa sistem kecerdasan buatan dapat diwujudkan dengan berbagai macam algoritma, yang salah satunya adalah logika Fuzi. Logika Fuzi ini telah diterapkan di berbagai bidang, demikian pula di bidang robotika [1-5].
Penelitian sebelumnya [1], mendasarkan implementasi pada robot komersial sedangkan penelitian [2], menfokuskan penelitian hanya pada kemampuan untuk menghindari halangan. Penelitian ini bertujuan untuk melakukan implementasi kendali logika fuzi dengan pendekatan berbasis perilaku dengan sistem dan komponen yang tersedia secara luas dan murah sehingga dapat menjadi suatu basic building block bagi sistem navigasi robot mobil. Untuk itu dipilih mikrokontroler 8 bit namun dengan konfigurasi Master-slave. Konfigurasi yang digunakan didasarkan pada pertimbangan bahwa jika keseluruhan proses, yaitu pengaturan kerja sensor, inferensi fuzi dan pengaturan motor DC, diimplementasikan pada satu buah mikrokontroler saja, maka beban mikrokontroler tersebut akan terlalu besar terutama dari pembagian sumber daya yang berkaitan dengan timer/pewaktu, dikarenakan pengaturan kerja sensor ultrasonik membutuhkan sekurang-kurangnya satu timer 16 bit, sedangkan pengaturan motor DC membutuhkan dua buah timer yang dioperasikan secara independen sebagai pembangkit sinyal PWM (Pulse Width Modulation).
2. METODE PENELITIAN
Kemampuan pergerakan secara autonomous dapat dibangun jika robot memiliki kemampuan untuk mengindera lingkungannya. Untuk keperluan ini digunakan sensor ultrasonik produksi Parallax. Sensor ini dalam penggunaannya hanya membutuhkan satu pin I/O saja dari mikrokontroler yang mengendalikan kerja sensor tersebut. Dengan program yang sesuai sensor ini dapat dipergunakan untuk melakukan pengukuran jarak pada range 2-300 cm. Pada penelitian ini hanya dipergunakan range 2-255 cm saja, agar nilai pengukuran jarak dapat disimpan dalam sebuah variabel 8 bit (satu byte), jika dipergunakan resolusi 1 cm.
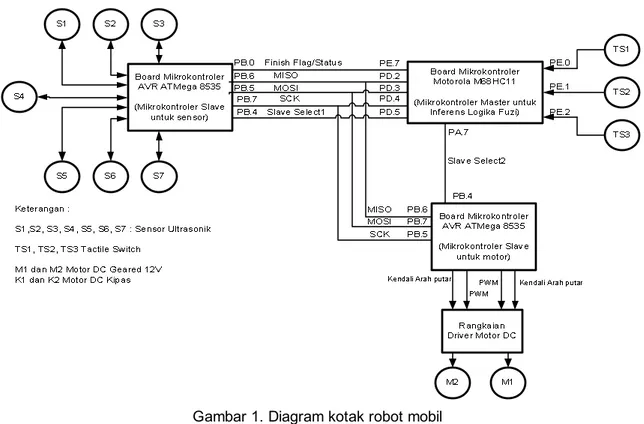
Gambar 1. Diagram kotak robot mobil
Diagram kontak robot mobil pada penelitian ini adalah ditunjukkan pada Gambar 1, sedangkan Rancangan secara fisik dari robot mobil pada penelitian ini adalah ditunjukkan pada Gambar 2. Robot menggunakan jenis robot mobil beroda, dengan penggerak differential yang
terdapat di sisi kanan dan kiri robot. Masing-masing sisi memiliki motor DC sebagai penggeraknya. Untuk dapat mencapai kemampuan autonomous, robot yang dirancang dilengkapi dengan sejumlah perilaku yang akan aktif ketika menghadapi kondisi tertentu.
Pengendali fuzi diimplementasikan pada Board Motorola M68HC11, database input/output, fungsi keanggotaannya serta aturan fuzi yang digunakan disusun menggunakan perangkat lunak FUDGE (Fuzzy Design Generator) dari Motorola. Pengendali logika fuzi yang disusun terdiri dari dua perilaku yaitu perilaku menghindari halangan (obstacle avoidance) dan perilaku menyusuri dinding/kontur (wall following/contour following). Perilaku menghindari halangan memiliki tiga buah input, yaitu variabel jarak yang diperoleh dari pengukuran tujuh sensor ultrasonik, serta memiliki dua output, yaitu kecepatan dan arah putar motor DC yang terletak di sisi kanan dan kiri robot mobil. Perilaku menyusuri dinding memiliki dua input, yaitu jarak robot terhadap dinding, sedangkan outputnya adalah seperti halnya perilaku menghindari halangan, yaitu kecepatan dan arah putar motor DC yang terletak di sisi kanan dan kiri robot mobil.
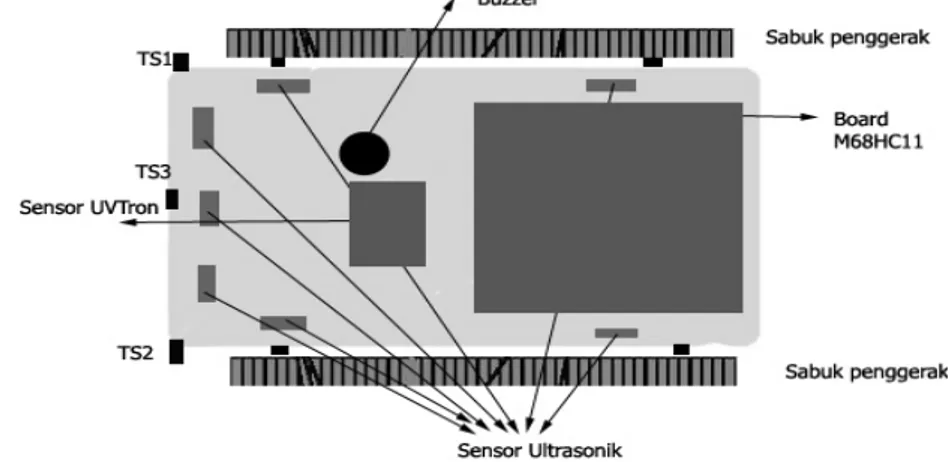
Gambar 2. Rancangan fisik robot mobil
FUDGE adalah suatu perangkat lunak untuk pengembangan program logika fuzi yang ditujukan pada Mikrokontroler Motorola maupun untuk aplikasi ANSI C. FUDGE digunakan untuk menyusun dan menguji aturan-aturan dan fungsi keanggotaan bagi aplikasi yang tengah dibuat. FUDGE dapat mengkodekan basis pengetahuan fuzi yang disusun untuk dipergunakan bersama-sama dengan kernel yang sesuai untuk mengimplementasikan suatu rutin logika fuzi. Rutin ini selanjutnya dapat digunakan sebagai bagian dari program aplikasi yang dapat di-download pada mikrokontroler Motorola maupun menjadi bagian dari suatu program dalam ANSI C.
Gambar 3. Proses Pengembangan Aplikasi pada FUDGE
Kernel logika fuzi atau juga disebut inference engine, adalah suatu potongan kode yang bersifat tetap yang melakukan fuzifikasi, evaluasi aturan dan defuzifikasi. Ketika suatu Kernel
digabungkan dengan aturan-aturan dan fungsi keanggotaan yang spesifik untuk suatu aplikasi, maka gabungan kode tersebut dapat dipergunakan sebagai suatu rutin logika fuzi. Secara grafis tahapan pengembangan suatu aplikasi fuzi melalui FUDGE adalah ditunjukkan pada Gambar 3. Pada penelitian ini pengendali fuzi yang disusun menggunakan fungsi keanggotaan segitiga dan trapesium, baik untuk perilaku menghindari halangan maupun menyusuri dinding. 2.1. Pengendali Fuzi untuk perilaku menghindari halangan.
Pada perilaku menghindari halangan ketujuh sensor ultrasonik dibagi menjadi tiga kelompok, yaitu Kanan, Kiri dan Tengah. Dipilih peletakan sensor seperti pada gambar 2 agar robot dapat mendeteksi keberadan benda/halangan yang terletak di depannya mengingat robot akan lebih banyak bergerak ke arah depan serta mengingat daerah kerja sensor ultrasonik yang menyerupai kerucut. Ketiga sensor ultrasonik yang menghadapa ke arah depan kemudian dilakukan operasi Min, agar diperoleh nilai yang terkecil dari ketiganya, nilai inilah yang menjadi input Tengah bagi sistem fuzi, yang selanjutnya disebut SONTE.
Sonar di sisi kanan dan kiri robot dikelompokkan menjadi dua input yang lain, yaitu SONKI dan SONKA. Nilai SONKI diperoleh dari operasi Min terhadap dua sensor ultrasonik yang terletak pada sisi kiri robot, sedangkan nilai SONKA diperoleh dari dua sensor ultrasonik yang terletak pada sisi kanan robot. Output dari sistem fuzi yang dibangun adalah arah dan kecepatan putar kedua motor penggerak yang disebut MOKI dan MOKA. Aturan fuzi yang dipergunakan pada pengendali fuzi untuk perilaku menghindari halangan adalah sebagai berikut:
IF SONKI IS Dekat AND SONTE IS Dekat THEN MOKI IS FastFor AND MOKA IS FastRev IF SONKI IS Dekat AND SONTE IS Jauh THEN MOKI IS FastFor AND MOKA IS FastFor IF SONKI IS Dekat AND SONTE IS Sedang THEN MOKI IS MedFor AND MOKA IS MedFor
IF SONKI IS Sedang AND SONTE IS Dekat AND SONKA IS Dekat THEN MOKI IS FastRev AND MOKA IS MedFor IF SONKI IS Sedang AND SONTE IS Dekat AND SONKA IS Sedang THEN MOKI IS MedFor AND MOKA IS FastRev IF SONKI IS Sedang AND SONTE IS Dekat AND SONKA IS Jauh THEN MOKI IS MedFor AND MOKA IS FastRev IF SONKI IS Sedang AND SONTE IS Sedang THEN MOKI IS MedFor AND MOKA IS MedFor
IF SONKI IS Sedang AND SONTE IS Jauh THEN MOKI IS FastFor AND MOKA IS FastFor IF SONKI IS Jauh AND SONTE IS Dekat THEN MOKI IS FastRev AND MOKA IS MedFor IF SONKI IS Jauh AND SONTE IS Sedang THEN MOKI IS MedFor AND MOKA IS MedFor IF SONKI IS Jauh AND SONTE IS Jauh THEN MOKI IS FastFor AND MOKA IS FastFor
2.2. Pengendali Fuzi untuk perilaku menyusuri dinding.
Pada perilaku menyusuri dinding hanya empat sesor ultrasonik yang dipergunakan, yaitu sensor yang terletak di sisi kanan dan kiri robot. Nilai pengukuran keempat sensor ini digunakan untuk menentukan terlebih dahulu apakah robot akan menyusuri dinding yang terletak di sebelah kanan atau di sebelah kiri robot. Robot akan memilih dinding yang terdekat untuk kemudian bergerak menyusuri dinding tersebut. Pengendali fuzi untuk perilaku ini memiliki dua input yaitu jarak sisi samping bagian depan robot terhadap dinding dan sisi samping bagian belakang robot terhadap dinding. Kedua input bagi sistem fuzi ini yang selanjutnya disebut SFR dan SB. Output dari sistem fuzi yang dibangun adalah arah dan kecepatan putar kedua motor penggerak yang disebut MOKI dan MOKA.
Perbedaan utama perilaku menyusuri dinding sebelah kiri dan kanan terletak pada pemilihan hasil pengukuran sensor yang dipergunakan sebagai variabel SFR dan SB serta aturan fuzi yang dipergunakan. Jika perilaku yang aktif adalah perilaku menyusuri dinding sebelah kiri maka hasil pengukuran dua buah sensor ultrasonik pada sisi kiri robot yang dipergunakan sebagai variabel SFR dan SB, sedangkan jika perilaku yang aktif adalah perilaku menyusuri dinding sebelah kanan maka hasil pengukuran dua buah sensor ultrasonik pada sisi kanan robot yang dipergunakan sebagai variabel SFR dan SB. Aturan fuzi yang dipergunakan pada pengendali fuzi untuk perilaku menyusuri dinding juga dibedakan antara menyusuri dinding sebelah kiri dengan menyusuri dinding sebelah kanan. Aturan fuzi untuk menyusuri dinding sebelah kiri adalah sebagai berikut:
IF SFR IS SMALL AND SB IS SMALL THEN MOKI IS FAST AND MOKA IS SLOW IF SFR IS SMALL AND SB IS MEDIUM THEN MOKI IS FAST AND MOKA IS MEDIUM IF SFR IS SMALL AND SB IS BIG THEN MOKI IS FAST AND MOKA IS SLOW IF SFR IS MEDIUM AND SB IS SMALL THEN MOKI IS MEDIUM AND MOKA IS FAST IF SFR IS MEDIUM AND SB IS MEDIUM THEN MOKI IS FAST AND MOKA IS FAST IF SFR IS MEDIUM AND SB IS BIG THEN MOKI IS FAST AND MOKA IS MEDIUM IF SFR IS BIG AND SB IS SMALL THEN MOKI IS SLOW AND MOKA IS FAST IF SFR IS BIG AND SB IS MEDIUM THEN MOKI IS MEDIUM AND MOKA IS FAST IF SFR IS BIG AND SB IS BIG THEN MOKI IS SLOW AND MOKA IS FAST
Aturan fuzi untuk menyusuri dinding sebelah kanan adalah sebagai berikut : IF SFR IS SMALL AND SB IS SMALL THEN MOKI IS MEDIUM AND MOKA IS FAST
IF SFR IS SMALL AND SB IS MEDIUM THEN MOKI IS MEDIUM AND MOKA IS FAST IF SFR IS SMALL AND SB IS BIG THEN MOKI IS SLOW AND MOKA IS FAST IF SFR IS MEDIUM AND SB IS SMALL THEN MOKI IS FAST AND MOKA IS MEDIUM IF SFR IS MEDIUM AND SB IS MEDIUM THEN MOKI IS FAST AND MOKA IS FAST IF SFR IS MEDIUM AND SB IS BIG THEN MOKI IS MEDIUM AND MOKA IS FAST IF SFR IS BIG AND SB IS SMALL THEN MOKI IS FAST AND MOKA IS SLOW IF SFR IS BIG AND SB IS MEDIUM THEN MOKI IS FAST AND MOKA IS MEDIUM IF SFR IS BIG AND SB IS BIG THEN MOKI IS FAST AND MOKA IS MEDIUM
2.3. Implementasi dan Integrasi Pada robot mobil
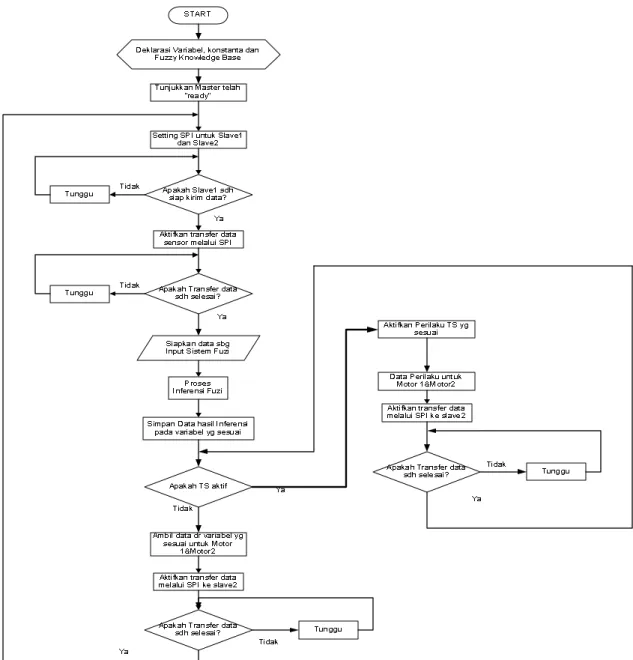
Untuk aplikasi pada robot mobil digunakan 7 buah sensor ultrasonik, untuk dapat berfungsi seperti pada Gambar 1. Flowchart untuk Mikrokontroler Master adalah sebagaimana Gambar 4.
Gambar 4. Flow chart untuk mikrokontroler master
Sebagai penggerak robot mobil ini digunakan dua buah motor DC yang dapat diatur kecepatan dan arah putarnya menggunakan mikrokontroler AVR ATMega 8535 sebagai slave2 dan rangkaian driver motor DC. Untuk dapat melakukan pengendalian kecepatan dan arah putar motor DC sesuai dengan output dari pengendali fuzi yang diimplementasikan pada Mikrokontroler M68HC11 sebagai Master, mikrokontroler AVR ATMega 8535 sebagai slave2
membutuhkan rangkaian driver motor DC. Rangkaian ini menggunakan L298 sebagai komponen utamanya. Rangkaian ini memiliki empat buah input untuk mengendalikan dua buah motor DC. Input tersebut adalah kendali arah putar dan kecepatan (PWM) untuk masing-masing motor DC.
3. HASIL DAN PEMBAHASAN 3.1. Pengujian sensor Ultrasonik
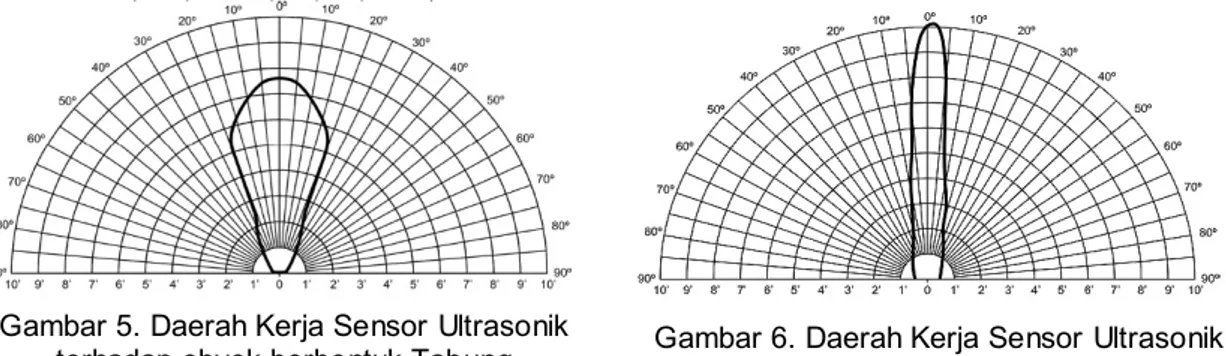
Rangkaian pengukuran jarak telah dapat berfungsi sebagai pengukur jarak. Jarak obyek yang terdeteksi ditampilkan pada penampil LCD. Daerah kerja sensor ultrasonik terhadap obyek berbentuk tabung dengan diameter 9 cm ditunjukkan oleh Gambar 5, sedangkan daerah kerja sensor terhadap obyek berupa benda datar berukuran 30x30 cm ditunjukkan pada Gambar 6.
Gambar 5. Daerah Kerja Sensor Ultrasonik
terhadap obyek berbentuk Tabung Gambar 6. Daerah Kerja Sensor Ultrasonik terhadap obyek berbentuk benda datar 3.2. Perilaku robot mobil.
Implementasi pengendali fuzi untuk perilaku menghindari halangan dan menyusuri dinding telah dapat dicapai. Robot telah mampu bernavigasi pada ruangan dengan berbagai penghalang tanpa menabrak. Ketika perilaku menyusuri dinding aktif robot telah mampu menjaga jarak 5 sampai 7 cm dengan dinding. Namun demikian robot ada kalanya memasuki ruangan yang sama secara berulang. Robot telah diujikan pada maket bangunan berukuran 240 cm x 240 cm, tinggi dinding maket bangunan 30 cm, sedangkan ketebalan dinding adalah 2 cm, serta menggunakan keramik sebagai lantainya.
4. SIMPULAN
Model robot dengan kendali multi-mikrokontroler berbasis logika fuzi dengan pendekatan berbasis perilaku yang dikembangkan pada penelitian ini telah menunjukkan kemampuan dasar yang dibutuhkan sebagai sebuah robot mobil, yaitu pergerakan autonomous. Pada penelitian ini, kemampuan untuk kembali ke tempat semula belum dapat diwujudkan. Penelitian selanjutnya hendaknya membangun kemampuan ini dengan melengkapi robot dengan sensor posisi dan orientasi.
DAFTAR PUSTAKA
[1]. Thongchai S., et al., “Sonar Behavior–Based Fuzzy Control for a Mobile Robot”, Proceeding of the IEEE International Conference on Systems, Man, and Cybernetics, Nashville, Tennessee, October 8-11, 2000.
[2]. Polat K., S. Sahan, and S. Gunes, “Finding The Direction Of a Mobile Robot Using Microcontroller Based Ultrasonic Distance Measuring Device And Fuzzy Logic”, Proceeding of International Conference on Signal Processing, Volume:1, Number:2, 2003. [3]. Nasution, H., “Development of Fuzzy Logic Control for Vehicle Air Conditioning
System”, Jurnal TELKOMNIKA, UAD, Yogyakarta, Vol. 6, No.2, Agustus 2008.
[4]. Moudgal Vivek G., A.K. Waihon, K.M. Passino., “Fuzzy Learning Control for a Flexible Link Robot”, IEEE Transactions on Fuzzy Systems, Vol.3, Issue 2, May 1995.
[5]. Saffiotti A., “The uses of fuzzy logic in autonomous robot navigation”, Soft Computing 1 (4): 180-197, 1997.