IMPLEMENTASI GESTURE STATIC PENGHITUNG JUMLAH JARI TANGAN MENGGUNAKAN LEAP MOTION SEBAGAI PENGENDALI GERAK MOTOR PADA MOBILE ROBOT BERBASIS RASPBERRY PI 3
MODEL B
OLEH :
RIAN FITRA PERDANA 09011181320002
JURUSAN SITEM KOMPUTER FAKULTAS ILMU KOMPUTER
UNIVERSITAS SRIWIJAYA
2019
i
IMPLEMENTASI GESTURE STATIC PENGHITUNG JUMLAH JARI TANGAN MENGGUNAKAN LEAP MOTION SEBAGAI PENGENDALI GERAK MOTOR PADA MOBILE ROBOT BERBASIS RASPBERRY PI 3
MODEL B
TUGAS AKHIR
Diajukan Untuk Melengkapi Salah Satu Syarat Memperoleh Gelar Sarjana Komputer
OLEH :
RIAN FITRA PERDANA 09011181320002
JURUSAN SITEM KOMPUTER FAKULTAS ILMU KOMPUTER
UNIVERSITAS SRIWIJAYA
2019
2ii
v
HALAMAN PERSEMBAHAN
Dari Abi Darda r.a. berkata, saya mendengar Rasuluullah Saw. Bersabda:
“ Bagi siapa menempuh jalan untuk menuntut ilmu, maka Allah akan memudahkan jalannya ke surga. Sesungguhnya para malaikat meletakkan
sayapnya (memayungkan sayapnya) kepada penuntut ilmu karena senang (rela) dengan yang ia tuntut.”
(HR. lbn Majah)
Skripsi ini kupersembahkan kepada : 1. Ayah dan Ibu tersayang
2. Saudara Saudariku
3. Orang orang terdekat yang selalu memberikan motivasi 4. Keluarga besar Sistem Komputer
5. Rekan-rekan seperjuangan di Sistem Komputer 2013 6. Almamaterku Universitas Sriwijaya
vi
KATA PENGANTAR
Puji syukur penulis panjatkan kehadiran Allah SWT yang telah memberikan rahmat, hidayah serta izin-Nya sehingga penulis dapat menyelesaikan penulisan tugas akhir ini. Tugas akhir dengan judul “Implementasi Gesture Static Penghitung Jumlah Jari Tangan Menggunakan Leap Motion Sebagai Pengendali Gerak Motor Pada Mobile Robot Berbasis Raspberry Pi 3 Model B”, dibuat dalam rangka memenuhi persyaratan untuk menyelesaikan pendidikan di Jurusan Sistem Komputer Fakultas Ilmu Komputer Universitas Sriwijaya.
Dalam penulisan Tugas Akhir ini penulis menyadari bahwa penulis banyak sekali mendapatkan dukungan dari berbagai pihak. Oleh karena itu dalam kesempatan ini penulis ingin mengucapkan terima kasih kepada :
1. Bapak Jaidan Jauhari, M.T. selaku Dekan Fakultas Ilmu Komputer.
2. Bapak Rossi Passarella, M.Eng. selaku Anggota Tim Penguji dan ketua Jurusan Sistem Komputer .
3. Ibu Sri Desy Siswanti, M.T. dan Bapak Ahmad Zarkasi, M.T. selaku Pembimbing Tugas Akhir.
4. Bapak Dr. Erwin, M.Si selaku Pembimbing Akademik.
5. Bapak Aditya Putra Perdana P, M.T. selaku Anggota Tim Penguji.
6. Bapak Dr. Ir. Bambang Tutuko, M.T. selaku Ketua Sidang.
7. Bapak dan Ibu dosen Sistem Komputer yang pernah mengajar selama masa studi.
8. Ayah, Ibu dan adik-adik yang selalu memberi doa, motivasi, dukungan dan kasih sayang.
9. Keluarga dan teman yang selalu membantu dan memotivasi, Kak Efri, Kak, Dodon, Kak Chan, Eko, Pebong, Faris, Dede, Aceng, Imam, Ulan, Elfa, Kusuma, Holil, Ilham dan Ojik.
10. Seluruh Teman Sistem Komputer Angkatan 2013 yang tidak bisa disebutkan satu persatu.
vii
viii
ix
x DAFTAR ISI
Halaman
HALAMAN JUDUL ... i
LEMBAR PENGESAHAN ... ii
HALAMAN PERSETUJUAN ... iii
HALAMAN PERNYATAAN ... iv
HALAMAN PERSEMBAHAN ... v
KATA PENGANTAR ... vi
ABSTRAK ... viii
DAFTAR ISI ... x
DAFTAR GAMBAR ... xiii
DAFTAR TABEL ... xvi
DAFTAR LAMPIRAN ... xvii
BAB I. PENDAHULUAN ... 1
1.1.Latar Belakang ... 1
1.2.Perumusan dan Batasan Masalah ... 2
1.2.1. Perumusan Masalah ... 2
1.2.2. Batasan Masalah ... 3
1.3.Tujuan ... 3
1.4.Manfaat ... 3
1.5.Metodologi Penelitian ... 4
1.6.Sistematika Penelitian ... 5
BAB II. TINJAUAN PUSTAKA ... 7
2.1 Pendahuluan ... 7
2.2 Leap Motion ... 7
xi
2.3 Klasifikasi Gestures pada Leap Motion ... 11
2.3.1. Action Gesture ... 12
2.3.2.1. Static Gesture ... 12
2.4 Center Of Gravity ... 14
2.5 Motor DC ... 15
BAB III. METODOLOGI PENELITIAN ... 17
3.1 Pendahuluan ... 17
3.2 Tahapan Penelitian ... 17
3.3 Perancangan Sistem ... 19
3.3.1. Perancangan Sistem Perangkat Lunak ... 20
3.3.2. Perancangan Sistem Perangkat Keras ... 23
3.4 Komponen Perangkat ... 29
3.4.1 Raspberry Pi 3 Model B ... 29
3.4.2 Modul Motor Driver L298N ... 30
3.5 Pengembangan Sistem Deteksi Jumlah Jari Tangan ... 31
3.5.1. Jumlah Jari ... 31
3.5.2. Koordinat Deteksi ... 32
3.5.3. Area Interaksi ... 33
BAB IV. HASIL DAN ANALISIS ... 36
4.1.Pendahuluan ... 36
4.2.Pengujian Sistem Deteksi Jumlah Jari ... 36
4.2.1 Pengujian Jumlah Jari 1 (Satu) ... 38
4.2.2 Pengujian Jumlah Jari 2 (Dua) ... 40
4.2.3 Pengujian Jumlah Jari 3 (Tiga) ... 42
4.2.4 Pengujian Jumlah Jari 4 (Empat) ... 43
4.2.5 Pengujian Jumlah Jari 5 (Lima) ... 45
4.3.Pengujian Sistem Deteksi Jumlah Jari Pada Mobile Robot ... 46
4.3.1. Pengujian Jumlah Jari 0 (Nol) Pada Mobile Robot ... 51
4.3.2. Pengujian Jumlah Jari 1 (Satu) Pada Mobile Robot ... 53
4.3.3. Pengujian Jumlah Jari 2 (Dua) Pada Mobile Robot ... 55
xii
4.3.4. Pengujian Jumlah Jari 3 (Tiga) Pada Mobile Robot ... 57
4.3.5. Pengujian Jumlah Jari 4 (Empat) Pada Mobile Robot ... 59
4.3.6. Pengujian Jumlah Jari 5 (Lima) Pada Mobile Robot ... 61
4.4.Analisis Pengujian Sistem Pengendali Mobile Robot dengan Jumlah Jari Tangan ... 64
BAB V. KESIMPULAN DAN SARAN ... 65
5.1 Kesimpulan ... 65
5.2 Saran... 66
DAFTAR PUSTAKA ... 67
xiii
DAFTAR GAMBAR
Halaman
Gambar 1.1. Diagram Alir Metodelogi Penelitian ... 5
Gambar 2.1. Sistem Koordinat Leap Motion ... 8
Gambar 2.2. Leap Motion Hand Trakcing ... 9
Gambar 2.3. Palm Position dan Palm Direction ... 9
Gambar 2.4. Tip Position ... 10
Gambar 2.5. Tulang pada tiap jari ... 11
Gambar 2.6. Diagram Klasifikasi Gestures pada Leap Motion ... 12
Gambar 2.7. Static Iconic ... 13
Gambar 2.8. Static Semaphoric ... 13
Gambar 2.9. Center Of Gravity ... 14
Gambar 2.10. Motor DC ... 15
Gambar 3.1. Tahapan Penelitian ... 18
Gambar 3.2. Blok Diagram Perancangan Sistem ... 19
Gambar 3.3. Flowchart Sistem Perangkat Lunak ... 21
Gambar 3.4. Flowchart Hitung jumlah Jari ... 22
Gambar 3.5. Flowchart Center Of Gravity ... 23
Gambar 3.6. Diagram Wiring Mobile Robot ... 24
Gambar 3.7. Body Robot Bagian Bawah Tampak Atas ... 25
Gambar 3.8. Body Robot Bagian Atas Tampak Atas ... 26
Gambar 3.9. Body Robot Tampak Samping ... 27
Gambar 3.10. Flowchart Sistem Perangkat Keras ... 28
Gambar 3.11. Raspberry Pi 3 Model B ... 29
xiv
Gambar 3.12. Modul Motor Driver L298N ... 30
Gambar 3.13. Area Interaksi Leap Motion Tampak Depan ... 33
Gambar 3.14. Area Interaksi Leap Motion Tampak Samping ... 34
Gambar 3.15. Area Interaksi Leap Motion 3 Dimensi ... 34
Gambar 4.1. Tampilan Sistem Jika Tangan Diluar Area Interaksi ... 36
Gambar 4.2. Tampilan Sistem Jika Satu Tangan Didalam Area Interaksi ... 37
Gambar 4.3. Tampilan Sistem Jika Dua Tangan Didalam Area Interaksi ... 38
Gambar 4.4. Jumlah Jari 1 (satu) ... 39
Gambar 4.5. Jumlah Jari 2 (dua) ... 40
Gambar 4.6. Jumlah Jari 3 (tiga) ... 42
Gambar 4.7. Jumlah Jari 4 (empat) ... 44
Gambar 4.8. Jumlah Jari 5 (Lima) ... 45
Gambar 4.9. Tampilan Sistem Perangkat Lunak Pengendali Roda Mobile Robot Ketika Tidak Ada Tangan Terdeteksi ... 46
Gambar 4.10. Tampilan Sistem Perangkat Lunak Pengendali Roda Mobile Robot Ketika Tangan Kanan Terdeteksi ... 47
Gambar 4.11. Tampilan Sistem Perangkat Lunak Pengendali Roda Mobile Robot Ketika Tangan Kiri Terdeteksi... 48
Gambar 4.12. Tampilan Perangkat Lunak Pengujian Jumlah Jari 0 (Nol)... 52
Gambar 4.13. Data Yang Diterima Perangkat Keras Pengujian Jumlah Jari 0 (Nol) ... 52
Gambar 4.14. Tampilan Perangkat Lunak Pengujian Jumlah Jari 1 (Satu) ... 54
Gambar 4.15. Data Yang Diterima Perangkat Keras Pengujian Jumlah Jari 1 (Satu) ... 54
Gambar 4.16. Tampilan Perangkat Lunak Pengujian Jumlah Jari 2 (Dua) ... 56
xv
Gambar 4.17. Data Yang Diterima Perangkat Keras Pengujian Jumlah Jari 2 (Dua) ... 56 Gambar 4.18. Tampilan Perangkat Lunak Pengujian Jumlah Jari 3 (Tiga) ... 58 Gambar 4.19. Data Yang Diterima Perangkat Keras Pengujian Jumlah Jari 3
(Tiga) ... 58 Gambar 4.20. Tampilan Perangkat Lunak Pengujian Jumlah Jari 4 (Empat) ... 60 Gambar 4.21. Data Yang Diterima Perangkat Keras Pengujian Jumlah Jari 4
(Empat) ... 60 Gambar 4.22. Tampilan Perangkat Lunak Pengujian Jumlah Jari 5 (Lima) ... 62 Gambar 4.23. Data Yang Diterima Perangkat Keras Pengujian Jumlah Jari 5
(Lima) ... 62
xvi
DAFTAR TABEL
Halaman
Tabel 1. Data Uji Jumlah Jari ... 31
Tabel 2. Titik Koordinat Pengujian Data... 32
Tabel 3. Hasil Pengujian Jumlah Jari 1 (Satu)... 39
Tabel 4. Hasil Pengujian Jumlah Jari 2 (Dua) ... 41
Tabel 5. Hasil Pengujian Jumlah Jari 3 (Tiga) ... 43
Tabel 6. Hasil Pengujian Jumlah Jari 4 (Empat) ... 44
Tabel 7. Hasil Pengujian Jumlah Jari 5 (Lima) ... 45
Tabel 8. Postur Input Jumlah Jari Dan Output Motor DC ... 49
Tabel 9. Tabel Definisi Pengujian Jumlah Jari ... 51
Tabel 10. Hasil Pengujian Jumlah Jari 0 (Nol) Pada Mobile Robot ... 53
Tabel 11. Hasil Pengujian Jumlah Jari 1 (Satu) Pada Mobile Robot ... 55
Tabel 12. Hasil Pengujian Jumlah Jari 2 (Dua) Pada Mobile Robot ... 57
Tabel 13. Hasil Pengujian Jumlah Jari 3 (Tiga) Pada Mobile Robot ... 59
Tabel 14. Hasil Pengujian Jumlah Jari 4 (Empat) Pada Mobile Robot ... 61
Tabel 15. Hasil Pengujian Jumlah Jari 5 (Lima) Pada Mobile Robot... 63
xvii
DAFTAR LAMPIRAN
Halaman Lampiran 1. Source Code Software ... A-1 Lampiran 2. Source Code Tampilan Software ... B-1 Lampiran 3. Source Code Hardware ... C-1
1
BAB I
PENDAHULUAN
1.1 Latar Belakang
Computer Vision merupakan sebuah proses otomatis yang mengintegrasikan sejumlah besar proses untuk persepsi Visual, seperti akuisisi citra, pengolahan citra, pengenalan pola dan membuat keputusan. Computer Vision mengambil konsep cara kerja mata manusia dengan menangkap objek atau citra yang dilihat, lalu mengirimkan informasi tentang objek atau citra tersebut ke otak dan mengambil sebuah keputusan terhadap objek tersebut.
Leap Motion merupakan salah satu alat yang dikembangkan dalam bidang Computer Vision. Leap Motion memungkinkan penggunanya untuk mengontrol computer menggunakan gerakan. Leap Motion mampu mendeteksi citra tangan dan benda yang mirip dengan tangan serta melaporkan nilai diskrit posisi dan gerakan/
isyarat. Leap Motion mampu bekerja mendekati 200 frame perdetik dengan jarak efektif pengontrolan (posisi tangan) 25-600 milimeter diatas perangkat [1].
Pada penelitian [2] gestur tangan digunakan sebagai navigasi menggunakan algoritma convexity hull defect dengan tingkat persentase kesalahan rata-rata sebesar 19,6 %. Kamera yang digunakan untuk mendeteksi gestur tangan pada penelitian ini adalah kamera WebCam 1,2 Megapixel. Kesalahan atau error yang terjadi disebabkan pemilihan gesture yang kurang tepat atau terlalu kompleks dengan melibatkan lebih dari 1 jari [2].
Fokus membahas tentang pengembangan dan pengukuran keakuratan fitur gestur statis pada penelitian [3]. Pada penelitian ini target uji yang berjumlah 28 gesture merupakan American Sign Language (ASL), postur yang memiliki kesamaan bentuk digolongkan menjadi satu jenis postur. Hasil deteksi digolongkan berdasarkan postur jari yang hampir serupa, agar ketika kesalahan deteksi terjadi dapat diketahui bahwa postur tersebut menyerupai postur seharusnya. Pada penelitian ini hasil akurasi yang diperoleh 76.67 %.
2
Pada penelitian [4] dengan menggunakan fitur gestur dinamis mendapatkan tingkat akurasi lebih tinggi yaitu 80.48 %, akan tetapi penelitian ini menggolongkan gestur menjadi 13 bagian dengan menggunakan posisi join sebagai parameternya, dan golongan tersebut merupakan gestur yang merupakan gestur dinamis.
Sedangkan pada penilitian [5] dengan judul “Arabic Static And Dynamic Gestures Recognition Using Leap Motion”, dimana pada penelitian ini dijelaskan bahwa fitur gestur statis digunakan pada deteksi postur tangan dan dinamis digunakan pada deteksi rotasi dan posisi. Pada penelitian ini gestur statis digunakan untuk mendeteksi Arabic alphabet dan Arabic numbers, serta gestur dinamis digunakan untuk mendeteksi kata kerja atau benda dengan satu tangan dan dua tangan. Dengan tingkat akurasi masing-masing 97.45% dan 96.41%.
Dengan merujuk pada penelitian [3] [4] [5], maka pada penelitian tugas akhir ini akan menggunakan fitur dari gestur statis untuk mendeteksi jumlah jari tangan yang aktif. Gestur yang akan dideteksi adalah perhitungan jumlah jari tangan aktif yang merupakan gerak statis, sehingga tidak membutuhkan kemampuan deteksi dari fitur gestur dinamis yang mendeteksi perubahan rotasi dan posisi gestur.
Berdasarkan penelitian-penelitian sebelumnya, penulis akan melakukan Implementasi Gesture Static Penghitung Jumlah Jari Tangan Menggunakan Leap Motion sebagai Pengendali Gerak Motor pada Mobile Robot Berbasis Raspberry Pi 3 Model B.
1.2 Perumusan dan Batasan Masalah 1.2.1. Perumusan Masalah
Berdasarkan latar belakang yang telah dikemukakan, maka rumusan masalah yang ada pada tugas akhir ini adalah :
1. Bagaimana mendeteksi jumlah jari tangan yang aktif pada tangan kiri dan kanan menggunakan Leap Motion.
2. Berapa persen akurasi Leap Motion menghitung jumlah jari tangan yang terbuka dengan fitur gestur statis.
3. Bagaimana mengendalikan gerak roda mobile robot menggunakan jumlah jari tangan.
3
1.2.2. Batasan Masalah
Berdasarkan latar belakang yang telah dikemukakan, maka batasan masalah yang ada pada tugas akhir ini adalah :
1. Leap Motion digunakan sebagai sensor pendeteksi tangan.
2. Gestur Statis digunakan untuk mendeteksi jumlah jari tangan yang aktif.
3. Jumlah jari yang digunakan sebagai kendali gerak mobile robot adalah jari pada tangan kanan sedangkan jumlah jari pada tangan kiri tidak dapat digunakan.
4. Sistem menggunakan bahasa pemrograman C# dengan aplikasi Visual Studio 2013.
5. Program penghitung jari tangan berjalan secara realtime.
6. Roda mobile robot akan bergerak clockwise atau counter clockwise.
7. Pengujian mobile robot dilakukan secara statis, bagian bawah mobile robot diberi penyangga.
1.3 Tujuan
Adapun tujuan yang hendak dicapai pada penelitian ini adalah:
1. Menganalisa tingkat akurasi deteksi jari tangan dengan fitur gestur statis menggunakan leap motion dan postur tangan yang memiliki tingkat akurasi paling tinggi.
2. Menerapkan kendali roda mobile robot melalui jumlah jari tangan dengan fitur gestur statis menggunakan leap motion.
1.4 Manfaat
Adapun manfaat yang dapat diambil dari penelitian ini adalah:
1. Dapat membantu mengembangkan sistem deteksi jari tangan menggunakan leap motion yang diterapkan pada raspberry pi.
2. Dapat menerapkan sistem gerak roda pada mobile robot dengan deteksi jumlah jari tangan menggunakan Leap Motion pada raspberry pi.
4
1.5 Metodologi Penelitian
Metodologi yang digunakan dalam tugas akhir ini akan melewati beberapa tahapan sebagai berikut:
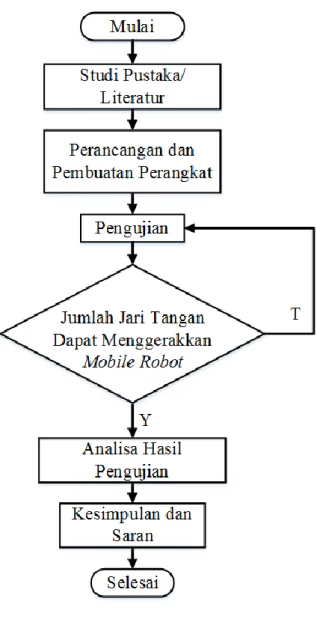
1. Studi Pustaka/Literatur
Tahap ini dilakukan dengan cara mempelajari jurnal dan buku yang berisi materi Leap Motion, dan fitur gestur statis sebagai bahan dalam pembuatan laporan tugas akhir.
2. Perancangan Dan Pembuatan Perangkat
Tahap ini dilakukan dengan melakukan perancangan dan pembuatan perangkat lunak dengan fitur gestur statis. Dan dilanjutkan melakukan perancangan dan pembuatan perangkat keras berupa Mobile Robot menggunakan rapberry pi.
3. Pengujian
Tahap ini dilakukan dengan pengujian terhadap perangkat lunak dan perangkat keras yang telat dibuat dan memeriksa hasil yang didapat apakah sesuai dengan yang diharapkan.
4. Analisa Hasil Pengujian
Tahap ini dilakukan dengan menganalisis hasil pengujian untuk mengetahui kekurangan dan faktor penyebabnya sehingga dapat diperbaiki dan dapat dilakukan pengembangan pada penelitian selanjutnya.
5. Kesimpulan Dan Saran
Tahap ini dilakukan dengan menarik kesimpulan dari analisa dan studi literature serta saran untuk penulis selanjutnya jika akan dijadikan bahan referensi.
5
Gambar 1.1 Diagram Alir Metodelogi Penelitian
1.6 Sistematika Penelitian
Penyusunan laporan tugas akhir terdiri dari beberapa bab agar pembahasan lebih sistematik dan spesifik dengan rincian sebagai berikut:
BAB I. PENDAHULUAN
Pada bab I berisikan penjelasan secara sistematis mengenai topik penelitian yang diambil meliputi latar belakang, tujuan, manfaat, perumusan dan batasan masalah, metodologi penulisan dan sistematika penulisan.
6
BAB II. TINJAUAN PUSTAKA
Pada bab II berisikan mengenai dasar teori dari penelitian terkait mengenai Leap Motion, dan fitur gestur statis yang berkaitan langsung dengan penelitian.
Bab ini akan menjadi tinjauan atau landasan dalam menganalisis batasan masalah yang telah dikemukakan pada bab sebelumnya.
BAB III. METODOLOGI
Bab III berisikan tentang penjelasan secara bertahap mengenai proses penelitian yang dilakukan. Penjelasan tersebut meliputi tahapan perancangan perangkat lunak, perangkat keras dan penerapan metode penelitian.
BAB IV. PENGUJIAN DAN ANALISIS
Bab ini menjelaskan mengenai hasil dari pengujian (experiment) yang telah dilakukan selama penelitian tugas akhir. Hasil dari pengujian tersebut akan dianalisis.
BAB V. KESIMPULAN DAN SARAN
Bab V berisi kesimpulan akhir dari pembahasan penelitian yang telah dilakukan. Pada bab ini juga terdapat saran-saran yang mungkin di perlukan dalam pengembangan penelitian selanjutnya dari pengujian dan analisis tugas akhir.
DAFTAR PUSTAKA
[1] F. Teknik, U. Hasanuddin, S. Language, and R. Using, “Pengenalan Bahasa Isyarat Indonesia ( SIBI ) Menggunakan Leap Motion Controller dan Algoritma Data Mining Naïve Bayes,” 2017.
[2] Sutarno, R. Passarella, and B. Arga, “Sistem Pengenalan Gesture Tangan Untuk Kendali Gerak Mobile Robot,” Konf. Nas. Teknol. Inf. Apl., vol. 4, pp. 151–156, 2016.
[3] J. Stephen H. McNeil, “Sign Language Static Gesture Recognition using Leap Motion,” no. November, 2017.
[4] S. Y. Boulahia et al., “Dynamic Hand Gesture Recognition Based on 3D Pattern Assembled Trajectories,” 2017.
[5] B. Hisham and A. Hamouda, “Arabic Static and Dynamic Gestures Recognition using Leap Motion,” J. Comput. Sci., vol. 13, no. 8, pp. 337–
354, 2017.
[6] M. Nowicki, O. Pilarczyk, and J. Wąsikowski, “Gesture Recognition Library for Leap Motion Controller,” 2014.
[7] N. Ahmed, “Gesture-based User Interface Design for Static 3D Content Manipulation Using Leap Motion Controller,” no. c, pp. 7–11, 2017.
[8] D. Kammer, M. Keck, G. Freitag, and M. Wacker, “Taxonomy and
Overview of Multi-touch Frameworks : Architecture , Scope and Features,”
2010.
[9] J. T. Informatika, F. T. Industri, C. Vision, and D. Warna, “Segmentasi Citra untuk Deteksi Objek Warna pada Aplikasi Pengambilan Bentuk Citra Rectangle,” vol. 7, pp. 1–10, 2015.
[10] I. D. G. A. Prastika, W. Setiawan, and P. K. Sudiarta, “Analisis Sistem Pengenalan Karakter Plat Kendaraan dari Citra Kendaraan,” vol. 15, no. 2, 2016.
[11] I. A. S. Filho, B. B. Gatto, L. D. S. Pio, E. N. Chen, J. M. Junior, and R.
Barboza, “Gesture Recognition Using Leap Motion : A Machine Learning- based Controller Interface,” pp. 659–662, 2018.
[12] B. Toghiani-rizi, M. Svensson, C. Lind, and M. Windmark, “Static Gesture Recognition using Leap motion,” 2016.
[13] Y. D. Widiarto, M. E. I. Najoan, M. D. Putro, and J. T. Elektro-ft, “Sistem Penggerak Robot Beroda Vacuum Cleaner Berbasis Mini Computer Raspberry pi,” vol. 7, no. 1, pp. 25–32, 2018.