OTOMATISASI ALAT PROTEKSI BEBAN MUATAN BERLEBIH MENGGUNAKAN LOAD CELL BERBASIS
ATMEGA328
LAPORAN TUGAS AKHIR
EVANI DESRYANTI 152408048
PROGRAM STUDI D3 FISIKA DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
MEDAN 2018
OTOMATISASI ALAT PROTEKSI BEBAN MUATAN BERLEBIH MENGGUNAKAN LOAD CELL BERBASIS
ATMEGA 328
LAPORAN TUGAS AKHIR
DIAJUKAN UNTUK MELENGKAPI TUGAS DAN MEMENUHI SYARAT MEMPEROLEH GELAR AHLI MADYA
EVANI DESRYANTI 152408048
PROGRAM STUDI D3 FISIKA DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
MEDAN 2018
PERNYATAAN
OTOMATISASI ALAT PROTEKSI BEBAN MUATAN BERLEBIH MENGGUNAKAN LOAD CELL BERBASIS ATMEGA 328
LAPORAN TUGAS AKHIR
Saya menyatakan bahwa tugas akhir ini adalah hasil karya sendiri, kecuali beberapa kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan, Juni 2018
Evani Desryanti 152408048
OTOMATISASI ALAT PROTEKSI BEBAN MUATAN BERLEBIH MENGGUNAKAN LOADCELL BERBASIS ATMEGA328
ABSTRAK
Di dalam dunia transportasi, jalan raya merupakan suatu fasilitas penting untuk kendaraan berjalan, dimana jalan memiliki bobot maksimal sehingga untuk mengurangi resiko kerusakan jalan dibuatkan jembatan timbang untuk mengetahui kendaraan yang melebihi batas bobot jalan nya. Selama ini meskipun jembatan timbang sudah ada namun masih banyak kendaraan yang melebihi batas bobot jalan dan tidak masuk ke jembatan timbang. Atas dasar kondisi tersebut maka dibuatlah suatu alat yaitu jembatan timbang menggunakan sensor berat load cell hx711. Jembatan timbang ini dirancang agar proses pengukuran berat kendaraan dilakukan dengan mudah, cepat, akurat dan mengurangi kecurangan dalam proses timbang. Dan untuk mengurangi terjadinya kerusakan jalan yang diakibatkan oleh bobot kendaraan yang berlebihan. Prototype jembatan timbang ini menggunakan mikrokontroler sebagai pengendali dari sensor berat load cell hx711 menggunakan bahasa pemrograman C dan menggunakan buzzer sebagai peringatan ketika bobot melebihi batas yang ditentukan secara otomatis berbunyi.
Untuk mengetahui bobot kendaraan jalan raya digunakanlah LCD sebagai antarmuka dengan tampilan berupa kalimat dan nilai berat pada saat benda terdeteksi.
Kata Kunci : Jembatan Timbang, Hx711, Load Cell, Mikrokontroller Atmega 328, Timbangan, Liquid Crystal Display (LCD), dan Buzzer.
AUTOMATION OF PROTECTIVE TOOLS LOAD MOTIONS TO USE LOAD CELL BASED ATMEGA 328
ABSTRACT
In the world of highway, transportation is an important facility for the vehicle running, where the road has maximum weight so that to reduce the risk of road damage, made weighbridge to find vehicle that exceeds the limit of its uchan weight. Although weigh bridges already exist but the are still many vehicles that exceed the weight limit of the road and do not enter the weighbridge. On the basis of theses conditions then made a tools that is weighbridges using weight censor load cell hx711. This weighbridge is designed for the measurement of vehicle weight is done easily, quickly, accurate and reduce fraud in the weigh process.
And to reduce damage on the road caused by the weight of vehicles that are overweight. This prototype weighbridge uses a microcontroller as a controller of load cell, hx711 weight censor uses C programming language, and use a buzzer as a warning when the weight exceeds the specified limit automatically reads. To determine the weight of the vehicle highway used lcd as interface with display of sentence and weight value at the moment object detected.
Keyword : Wheigh Bridge, Hx711, Load Cell, Microcontroller Atmega 328, Scales, Liquid Crystal Display (LCD), and Buzzer
KATA PENGANTAR
Puji dan syukur penulis ucapkan kepada Allah SWT yang telah memberikan rahmat, hidayah, dan karunia-Nya kepada penulis sehingga dapat menyelesaikan laporan tugas proyek ini tepat waktu yang sesuai dengan instruksi dan peraturan yang berlaku di Fakultas Matematika dan Ilmu Pengetahuan Alam serta shalawat beriring salam penulis hadiahkan kepada Nabi Muhammad SAW, semoga mendapat safa’at diakhir kelak.
Dalam penyusunan dan penulisan tugas akhir ini, penulis banyak mendapat bantuan, dukungan, dan bimbingan dari berbagai pihak. Pada kesempatan ini penulis ingin mengucapkan rasa terimakasih dan penghargaan kepada:
1. Bapak Dr. Kerista Sibayang, M.S selaku Dekan Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara.
2. Bapak Drs. Takdir Tamba, M.Eng.Sc selaku Ketua Program Studi D3 Fisika Fakultas Matematika dan Ilmu Pengetahuan Universitas Sumatera Utara.
3. Bapak Prof. Dr. Nasruddin MN, M.Eng selaku Dosen Pembimbing penulis, yang telah banyak memberikan pengarahan dan bimbingan kepada penulis dalam menyelesaikan Tugas Akhir.
4. Seluruh Staff Pengajar / Pegawai program studi D3 Fisika Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara.
5. Terkhusus Kepada Ayahanda dan Mama tercinta yang senantiasa memberikan dukungan doa, moril dan material serta bimbingan yang sangat membantu penulis.
6. Kak Irna Puspita Sari dari Politeknik Negeri Lhokseumawe yang selalu ada memberikan doa, motivasi untuk mendukung serta penulis bisa menyelesaikan Tugas Proyek ini.
7. Adji Satrya Wijaya selaku rekan seperjuangan yang selalu memberikan dukungan dan motivasi kepada penulis.
8. Teman-teman D3 Fisika angkatan 2015 Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara.
9. Semua pihak yang terlibat langsung maupun tidak langsung yang penulis tidak dapat tuliskan satu per satu.
Semoga Allah SWT melimpahkan rahmat dan karunia-Nya kepada semua pihak yang telah memberikan bantuan, semangat, dukungan dan perhatian kepada penulis dalam menyelesaikan laporan Tugas Proyek ini. Semoga laporan tugas proyek ini bermanfaat bagi penulis, pendidikan, masyarakat, organisasi atau negara.
Medan, Juli 2018
Penulis
DAFTAR ISI
Halaman
PENGESAHAN LAPORAN TUGAS AKHIR i
PERNYATAAN ii
ABSTRAK iii
ABSTRACT iv
PENGHARGAAN v
DAFTAR ISI vii
DAFTAR TABEL x
DAFTAR GAMBAR xi
BAB I PENDAHULUAN 1
1.1. Latar Belakang 1
1.2. Rumusan Masalah 2
1.3. Batasan Masalah 2
1.4. Tujuan Penelitian 3
1.5. Metode Penulisan 3
1.6. Sistematika Penulisan 4
BAB II TINJAUAN PUSTAKA 5
2.1. Arduino Nano 5
2.1.1. Konfigurasi Pin Arduino Nano 6
2.1.2. Spesifikasi Arduino Nano 8
2.1.3. Sumber Daya 9
2.1.4. Pemrograman 9
2.1.5. Power Supply 9
2.1.6. Input dan Output (I/O) 10
2.1.7. Komunikasi 11
2.1.8. Memory 11
2.1.9. Reset (Software) 12
2.2. Load Cell 12
2.2.1. Prinsip Kerja Load Cell 13
2.2.2 Spesifikasi Sensor LoadCell 14
2.2.3. Analog Digital Converter ADS7822 14
2.3. Modul Penguat HX711 15
2.3.1. Fitur Modul Penguat HX711 16
2.3.2. Kelebihan Modul Penguat HX711 16
2.4. Liquid Crystal Display (LCD) 17
2.5. Buzzer 21
2.6. Sistem Otomatis 22
2.7 Muatan Berlebih (Over Loading) 22
2.8. KiCad E.D.A 23
BAB III PERANCANGAN DAN PEMBUATAN 25
3.1. Waktu dan Tempat 25
3.2. Alat dan Bahan 25
3.2.1. Alat yang Digunakan 25
3.2.2. Bahan yang Digunakan 25
3.3. Spesifikasi Sistem 26
3.3.1. Fungsi Diagram Blok 27
3.3.2. Rangkaian Power Supply 27
3.3.3. Rangkaian HX711 dan Load Cell 27
3.3.4. Rangkaian ATMega 328 29
3.3.5. Rangkaian Liquid Crystal Display 29
3.3.6. Rangkaian Buzzer 30
3.4. Rangkaian Keseluruhan 30
3.5. Perancangan Printed Circuit Board (PCB) 31 3.6. Software Pemrograman Dan Program Sensor 32
3.6.1. Software Arduino.cc 1.7.11 32
3.6.2. Program Sensor Berat 33
3.7 Flowchart Sistem 37
BAB IV PENGUJIAN DAN HASIL 38
4.1. Pengujian Rangkaian Sumber Daya 38 4.2. Pengujian Rangkaian Mikrokontroler Arduino Nano 38 4.3. Pengujian Rangkaian Load Cell dan IC HX711 39
4.4. Pengujian Rangkaian LCD 41
4.5. Pengujian Rangkaian Buzzer 42
4.6. Gambar Pengujian Alat 42
4.6.1 Pengujian Berat Normal 43
4.6.2 Pengujian Berat Melebihi 43
4.6.3 Pengujian Berat Melebihi 44
4.2 Analisa Sistem 45
4.2.1 Sensor Berat 45
4.2.1.1 Kalibrasi 45
4.2.1.2 Analisa Keseluruhan Rangkaian 47
BAB V PENUTUP 52
5.1. Kesimpulan 52
5.2. Saran 53
DAFTAR PUSTAKA 54
LAMPIRAN xii
1. Rangkaian Lengkap 2. Program Lengkap
3. Data Sheet Arduino Nano 4. Data Sheet Load Cell 5. Data Sheet LCD 6. Data Sheet Buzzer
DAFTAR TABEL
Nomor Tabel Judul Halaman
2.1. Konfigurasi Pin Arduino Nano 7
2.2. Spesifikasi Sensor Load Cell 14
2.3. Operasi Dasar LCD 19
2.4. Konfigurasi Pin LCD 19
2.5. Konfigurasi LCD 19
2.6 Tabel Kesalahan Maksimum Batu Timbangan 45
2.7 Hasil Data Kalibrasi Batu Timbangan 47
2.8 Hasil Data Percobaan Berat Beban 48
2.9 Hasil Pengukuran Mobil 48
3.10 Hasil Pengukuran Load Cell dengan Timbangan Konvensional 49
DAFTAR GAMBAR
Nomor Gambar Judul Halaman
2.1 Bagian Depan Arduino Nano 5
2.2. Bagian Belakang Arduino Nano 6
2.3. Konfigurasi Pin Layout Arduino Nano 8
2.4. Load Cell 12
2.5. Konfigurasi Kabel Sensor Load Cell 13
2.6. Konfigurasi Pin ADS7822 15
2.7. Modul Penguat HX711 16
2.8. LCD 2 x 16 17
2.9. Konfigurasi Pin LCD 18
2.10. Buzzer 21
2.11. Schematic KidCat 24
2.12. Layout KidCat 24
3.1. Diagram Blok Sistem 27
3.2. Rangkaian Power Supply 27
3.3. Rangkaian HX711 dan Load Cell 28
3.4. Rangkaian ATMega 328 29
3.5. Rangkaian LCD 29
3.6. Rangkaian Buzzer 30
3.7. Rangkaian Keseluruhan 31
3.8. Tata Letak Jalur PCB 32
3.9. Software Arduino.cc 33
3.10. Flowchart Sistem 37
4.1. Informasi Signature Mikrokontroller Arduino Nano 39
4.2. Hasil pengujian LCD 42
4.3. Pengujian Tampilan Awal 42
4.4. Pengujian Beban Normal 43
4.5. Pengujian Beban Melebihi 43
4.6. Pengujian Beban Melebihi 44
4.7. Batu Timbangan 45
4.8. Hasil Tampilan Kalibrasi 47
4.9. Hasil Pengukuran Konvensional (a) 20 g dan (b) 60 g 49 4.10. Hasil Pengukuran Konvensional (c) 72 g dan (d) 172 g 49
BAB I PENDAHULUAN
1.1 Latar Belakang
Timbangan adalah sebuah alat bantu yang digunakan untuk mengetahui berat suatu benda. Jenis timbangan yang digunakan bermacam-macam, mulai dari timbangan manual, timbangan mekanik hingga timbangan digital. Timbangan digital merupakan alat ukur untuk mengukur masa benda atau zat dengan tampilan digital. Dalam pemanfaatannya timbangan digunakan di berbagai bidang, dari bidang perdagangan, industri sampai dengan perusahaan jasa. Timbangan digital mempunyai tingkat ketelitian yang lebih baik dan pengoperasian yang lebih efisien dari pada timbangan analog. Pengguna hanya melihat angka yang tertera pada layar LCD (Liquid Crystal Display).
Saat ini pemanfaatan kedua jenis timbangan ini hanya digunakan untuk mengukur besaran massa saja. Timbangan digital dengan keluaran massa saja tidak cukup untuk digunakan dalam menentukan gaya berat yang bekerja pada sebuah benda dengan massa tertentu. Timbangan analog juga sangat sulit jika dibuat untuk keluaran yang banyak selain satu jenis keluaran. Hampir semua timbangan sudah menggunakan teknologi pengukuran secara digital dengan hasil pengukuran yang lebih akurat. Dalam pembuatan timbangan digital, perusahaan menggunakan sensor dan transduser untuk mengukur berat beban yang berbentuk mekanik. Yaitu sensor berat (load cell) yang terdapat strain gauge di dalam sensor beban tersebut.
Dalam tugas akhir sensor berat Load Cell diintegrasikan dengan HX711 sebagai jembatan timbang. Dengan integrasi ini beberapa kelebihan diperoleh yaitu mendapatkan peringatan ketika beban berlebih, tidak perlu memanggil orang untuk memprogram ulang kembali ke titik nol. Hanya saja tinggal menekan tombol reset. Informasi beban berlebih dari adanya tekanan yang diberikan benda merupakan informasi yang penting untuk mendukung kegiatan manusia dalam memantau berat benda ketika berada di jembatan timbang, atau pada saat di jalan
tol, maupun di jalan raya. Karena setiap beban berlebih dapat menyebabkan beberapa kerusakan.
Dengan menggunakan sensor berat Load Cell maka kita dapat mengetahui nilai beban benda. Dalam tugas akhir ini dilakukan pengujian terhadap cara kerja alat. Dimana arduino berfungsi sebagai pusat pengendalian alat dalam bekerja, yang akan menampilkan hasil pengukuran berat dari benda dengan penguat HX711 ke dalam LCD serta akan mengirimkan perintah ke Buzzer.
Berdasarkan latar belakang tersebut maka penulis membuat “ Otomatisasi Alat Proteksi Beban Muatan Berlebih Menggunakan Load Cell Berbasis ATmega 328 ”. Sebagai pembahasan dalam Tugas Akhir yang dibuat oleh penulis.
1.2 Rumusan Masalah
Berdasarkan hal tersebut diatas maka timbul permasalahan yaitu
1. Bagaimana membuat seperangkat sistem proteksi beban muatan berlebih yang dapat berfungsi memberikan informasi nilai berat serta memberikan peringatan terhadap beban yang berlebihan.
2. Bagaimana respon alarm pada saat sistem proteksi beban muatan berlebih dijalankan dan pada berat berapa alarm akan berbunyi.
3. Bagaimana proses mikrokontroller ATmega328 dalam mengatur seluruh kegiatan di dalam sistem ini.
1.3 Batasan Masalah
Dalam perancangan penulisan ini terdapat beberapa batasan masalah sebagai berikut:
1. Pengujian dilakukan hanya untuk melihat apakah alat yang dirancang sudah dapat bekerja dengan baik.
2. Sistem yang akan dibuat berbasis mikrokontroler ATmega 328 Arduino yang mengatur seluruh kegiatan sistem.
3. Sensor yang digunakan adalah sensor Load Cell.
4. Sistem menampilkan informasi nilai berat dalam satuan gram (gr).
5. Tanda peringatan pada sistem proteksi beban berlebih ini berupa buzzer.
1.4 Tujuan Pembuatan
Adapun tujuan dari pembuatan tugas akhir ini adalah :
1. Untuk mengaplikasikan sistem mikrokontroler Atmega 328 menjadi sebuah Otomatisasi Alat Proteksi Beban Muatan Berlebih Berbasis ATmega328.
2. Untuk membuat sistem otomatisasi alat proteksi beban berlebih berbasis atmega 328 dengan menggunakan analog sound sensor dengan bunyi buzzer.
3. Untuk mengetahui tampilan di lcd secara kuantitatif maupun kualitatif.
Dengan tampilan diawali bacaan Selamat Datang selanjutnya tampilan dibawah berupa Berat : 0,0 gram.
1.5 Metode Penulisan
Adapun metode penulisan yang digunakan dalam menyusun dan menganalisa proyek ini adalah:
1. Studi literatur yang berhubungan dengan perancanangan dan pembuatan alat ini.
2. Perencanaan dan pembuatan alat.
Merencanakan peralatan yang telah dirancang baik software maupun hardware.
3. Pengujian alat.
Peralatan yang telah dibuat kemudian diuji apakah telah sesuai yang telah direncanakan.
4. Konsultasi.
Konsultasi rutin dengan dosen pembimbing dan berbagai pihak terkait yang berkompeten.
5. Analisis Kebutuhan.
Dilaksanakan perancangan sistem otomatisasinya berdasarkan kebutuhan untuk memperoleh bentuk simulasi jembatan timbang
.
1.5 Sistematika Penulisan
Untuk mempermudah pembahasan dan pemahaman maka penulisan membuat sistematika pembahasan bagaimana sebenarnya prinsip kerja Otomatisasi Alat Proteksi Beban Muatan Berlebih Menggunakan Load Cell Berbasis ATmega 328, penulis membuat laporan ini dengan beberapa pembahasan yang dibagi beberapa bab sebagai berikut:
BAB I : PENDAHULUAN
Dalam bab ini berisikan mengenai latar belakang masalah, rumusan masalah, batasan masalah, tujuan penulisan, metode penulisan, serta sistematika penulisan.
BAB II : LANDASAN TEORI
Dalam bab ini berisi tentang teori dasar yang digunakan sebagai bahan acuan tugas akhir, serta komponen yang perlu diketahui untuk mempermudah dalam memahami sistem kerja alat ini.
BAB III : PERANCANGAN DAN PEMBUATAN
Dalam bab ini berisikan tentang waktu dan tempat dilakukan perancangan, alat dan bahan yang diperlukan dalam proses perancangan dan pembuatan alat, diagram blok dari program yang akan diisi, skematik dari masing-masing rangkaian.
BAB IV : PENGUJIAN RANGKAIAN
Dalam bab ini akan dibahas hasil analisa rangkaian dan sistem kerja alat, penjelasan mengenai rangkaian-rangkaian yang digunakan, penjelasan mengenai program yang diisikan ke mikrokontroller atmega 328 dan pengujian alat.
BAB V : KESIMPULAN DAN SARAN
Dalam bab ini berisikan kesimpulan dari pembahasan yang dilakukan mulai dari perancangan sistem dan saran, apakah sistem ini dapat dibuat lebih efisien dan dikembangkan pada suatu metode lain yang mempunyai sistem kerja yang sama.
BAB II
TINJAUAN PUSTAKA
2.1. Arduino Nano
Arduino merupakan sebuah platform dari physical computing yang bersifat open source. Pertama-tama perlu dipahami bahwa kata "platform" disini adalah sebuah pilihan kata yang tepat. Arduino tidak hanya sekedar sebuah alat pengembangan, tetapi ia adalah kombinasi dari hardware, bahasa pemrograman dan Integrated Development Environtment (IDE) yang canggih. IDE adalah sebuah software yang sangat berperan untuk menulis program, meng-compile menjadi kode biner dan meng-upload ke dalam memory microcontroller.
Arduino Nano adalah salah satu papan pengembangan (development board) mikrokontroler yang berukuran kecil, lengkap dan mendukung penggunaan breadboard. Arduino diciptakan dengan basis mikrokontroler ATmega 328 (untuk Arduino Nano versi 3.x) atau ATmega168 (untuk Arduino versi 2.x). Arduino Nano kurang memiliki fungsi yang sama dengan Arduino Duemilanove, tetapi dalam paket yang berbeda. Arduino Nano tidak menyertakan colokan DC berjenis Barrel Jack, dan dihubungkan ke komputer menggunakan port USB Mini-B. Arduino Nano dirancang dan diproduksi oleh perusahaan Gravitech.
Gambar 2.1 Bagian Depan Arduino Nano
Gambar 2.2 Bagian Belakang Arduino Nano
2.1.1 Konfigurasi Pin Arduino Nano
Konfigurasi pin arduino nano memiliki 30 Pin. Berikut konfigurasi pin Arduino Nano.
1. VCC merupakan pin yang berfungsi sebagai pin masukan catu daya digital.
2. GND merupakan pin ground untuk catu daya digital.
3. AREF merupakan Referensi tegangan untuk input analog. Digunakan dengan fungsi analogReference().
4. RESET merupakan jalur LOW. Ini digunakan untuk mereset (menghidupkan ulang mikrokontroler. Biasanya digunakan untuk menambahkan tombol reset pada shield yang menghalangi papan utama Arduino.
5. Serial RX(0) merupakan pin yang berfungsi sebagai penerima TTL data serial.
6. Serial TX (1) merupakan pin yang berfungsi sebagai pengirim TT data serial.
7. External Interupt (Interupsi Eksternal) merupakan pin yang dapat dikonfigurasi untuk memiliki sebuah interupsi pada nilai yang rendah, meningkat atau meurun, atau perubahan nilai.
8. Output PWM 8-Bit merupakan pin yang berfungsi untuk analogWrite().
9. SPI merupakan pin yang berfungsi sebagai pendukung komunikasi.
LED merupakan pin yang berfungsi sebagai pin yang diset bernilai HIGH, maka LED akan menyala, ketika pin diset bernilai LOW maka LED padam. LED tersedia secara built-in pada papan Arduino Nano.
10. Input Analog (A0-A7) merupakan pin yang berfungsi sebagai pin yang dapat diukur/diatur dari mulai Ground sampai dengan 5Volt, juga memungkinkan untuk mengubah titik jangkauan tertinggi atau terendah mereka menggunakan fungsi analogReference().
\
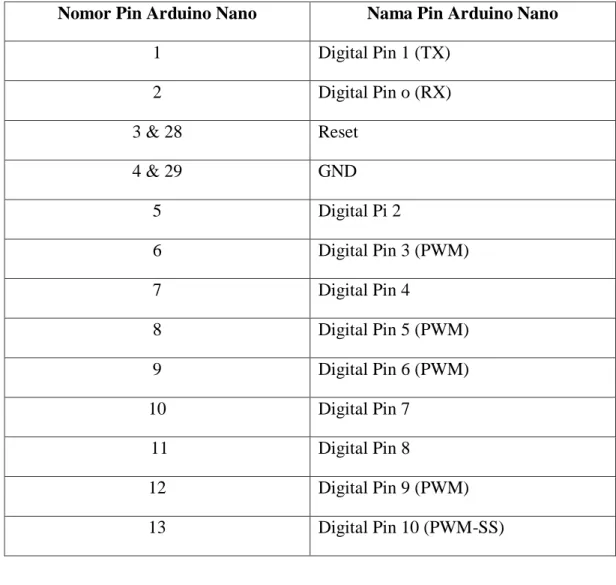
Tabel 2.1 Konfigurasi Pin Arduino Nano.
Nomor Pin Arduino Nano Nama Pin Arduino Nano
1 Digital Pin 1 (TX)
2 Digital Pin o (RX)
3 & 28 Reset
4 & 29 GND
5 Digital Pi 2
6 Digital Pin 3 (PWM)
7 Digital Pin 4
8 Digital Pin 5 (PWM)
9 Digital Pin 6 (PWM)
10 Digital Pin 7
11 Digital Pin 8
12 Digital Pin 9 (PWM)
13 Digital Pin 10 (PWM-SS)
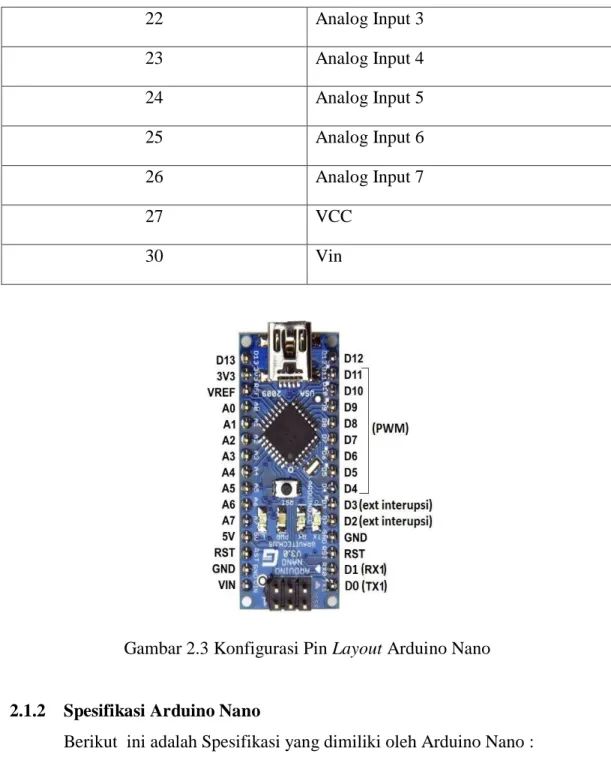
Nomor Pin Arduino Nano Nama Pin Arduino Nano
14 Digital Pin 11 (PWM-MOSI)
15 Digital Pin 12 (MISO)
16 Digital Pin 13 (SCK)
18 AREF
19 Analog Input 0
20 Analog Input 1
21 Analog Input 2
22 Analog Input 3
23 Analog Input 4
24 Analog Input 5
25 Analog Input 6
26 Analog Input 7
27 VCC
30 Vin
Gambar 2.3 Konfigurasi Pin Layout Arduino Nano
2.1.2 Spesifikasi Arduino Nano
Berikut ini adalah Spesifikasi yang dimiliki oleh Arduino Nano : 1. Mikrokontroler Atmel ATmega168 atau ATmega328.
2. 5 Volt Tegangan Operasi.
3. 7-12 Volt Input Voltage (disarankan).
4. 6-20 Volt Input Voltage (limit).
5. Pin Digital I/O 14 (6 pin digunakan sebagai output PWM).
6. 8 pin Input Analog.
7. 40 mA Arus DC per pin I/O.
8. Flash Memory 16KB (ATmega168) atau 32KB (ATmega328) 2KB digunakan oleh bootloader.
9. 1 Kbyte SRAM (ATmega168) atau 2 Kbyte (ATmega328).
10. 512 Byte EEPROM (ATmega168) atau 1 Kbyte (ATmega328).
11. 16 MHz Clock Speed.
12. Ukuran 1.85 cm x 4.3 cm.
2.1.3 Sumber Daya
Arduino Nano dapat diaktifkan melalui koneksi USB Mini-B, atau melalui catu daya eksternal dengan tegangan belum teregulasi antara 6-20 Volt yang dihubungkan melalui pin 30 atau pin VIN, atau melalui catu daya eksternal dengan tegangan teregulasi 5 volt melalui pin 27 atau pin 5V. Sumber daya akan secara otomatis dipilih dari sumber tegangan yang lebih tinggi. Chip FTDI FT232L pada Arduino Nano akan aktif apabila memperoleh daya melalui USB, ketika Arduino Nano diberikan daya dari luar (Non-USB) maka Chip FTDI tidak aktif dan pin 3.3V pun tidak tersedia (tidak mengeluarkan tegangan), sedangkan LED TX dan RX pun berkedip apabila pin digital 0 dan 1 berada pada posisi HIGH.
2.1.4 Pemrograman
Pemrograman board Arduino Nano dilakukan dengan menggunakan Arduino Software (IDE) yang bisa anda download gratis disini. Chip ATmega328 yang terdapat pada Arduino Nano telah diisi program awal yang sering disebut bootloader. Bootloader tersebut yang bertugas untuk memudahkan anda melakukan pemrograman lebih sederhana menggunakan Arduino Software tanpa harus menggunakan tambahan hardware lain. Dengan menghubungkan Arduino dengan kabel USB ke PC, Mac, atau Linux, kemudian jalankan software Arduino Software (IDE), setelah itu kita sudah bisa mulai mem-program chip ATmega328.
2.1.5 Power Supply
Development Board Arduino Nano dapat diberi tenaga dengan power yang diperoleh dari koneksi kabel Mini-B USB, atau via power supply eksternal.
External power supply dapat dihubungkan langsung ke pin 30 atau Vin(unregulated 6V - 20V), atau ke pin 27 (regulated 5V). Sumber tenaga akan otomatis dipilih mana yang lebih tinggi tegangan.
2.1.6 Input dan Output (I/O)
Seperti yang telah disebutkan sebelumnya, Arduino Nano memiliki 14 buah digital pin yang dapat digunakan sebagai input atau output, dengan menggunakan fungsi pinMode(), digitalWrite(), dan digitalRead(). Pin-pin tersebut bekerja pada tegangan 5V, dan setiap pin dapat menyediakan atau menerima arus 20mA, dan memiliki tahanan pull-up sekitar 20-50k ohm (secara default dalam posisi discconnect). Nilai maksimum adalah 40mA, yang sebisa mungkin dihindari untuk menghindari kerusakan chip mikrokontroler.
Beberapa pin memiliki fungsi khusus :
a) Serial, terdiri dari 2 pin : pin 0 (RX) dan pin 1 (TX) yang digunakan untuk menerima (RX) dan mengirim (TX) data serial.
b) External Interrups, yaitu pin 2 dan pin 3. Kedua pin tersebut dapat digunakan untuk mengaktifkan interrups. Gunakan fungsi attachInterrupt() c) PWM: Pin 3, 5, 6, 9, 10, dan 11 menyediakan output PWM 8-bit dengan
menggunakan fungsi analogWrite()
d) SPI : Pin 10 (SS), 11 (MOSI), 12 (MISO), dan 13 (SCK) mendukung komunikasi SPI dengan menggunakan SPI Library
e) LED : Pin 13. Pada pin 13 terhubung built-in led yang dikendalikan oleh digital pin no 13.
Arduino Nano memiliki 8 buah input analog, yang diberi tanda dengan A0 hingga A7. Masing-masing pin analog tersebut memiliki resolusi 1024 bits (jadi bisa memiliki 1024 nilai). Secara default, pin-pin tersebut diukur dari ground ke 5V, namun bisa juga menggunakan pin REF dengan menggunakan fungsi analogReference().
Pin Analog A6 dan A7 tidak bisa dijadikan sebagai pin digital, hanya sebagai analog. Beberapa pin lainnya pada board ini adalah :
a) I2C : Pin A4 (SDA) dan A5 (SCL). Pin ini mendukung komunikasi I2C (TWI) dengan menggunakan Wire Library.
b) AREF. Sebagai referensi tegangan untuk input analog.
c) Reset. Hubungkan ke LOW untuk melakukan reset terhadap mikrokontroller. Biasanya digunakan untuk dihubungkan dengan switch yang dijadikan tombol reset.
2.1.7 Komunikasi
Arduino Nano memiliki sejumlah fasilitas untuk berkomunikasi dengan computer dan Arduino lain, atau dengan mikrokontroler lainnya. ATmega168 dan ATmega328 menyediakan komunikasi serial UART TTL (5 Volt), yang tersedia pada pin digital 0 (RX) dan pin 1 (TX). Sebuah chip FTDI FT232RL yang terdapat pada papan Arduino Nano digunakan sebagai media komunikasi serial melalui USB dan driver FTDI (tersedia pada software Arduino IDE) yang akan menyediakan COM Port Virtual (pada Device komputer) untuk berkomunikasi dengan perangkat lunak pada komputer. Perangkat lunak Arduino termasuk didalamnya serial monitor memungkinkan data tekstual sederhana dikirim ke dan dari papan Arduino. LED RX dan TX yang tersedia pada papan akan berkedip ketika data sedang dikirim atau diterima melalui chip FTDI dan koneksi USB yang terhubung melalui USB komputer (tetapi tidak untuk komunikasi serial pada pin 0 dan 1).
Sebuah perpustakaan Software Serial memungkinkan komunikasi serial pada beberapa pin digital Nano. ATmega168 dan ATmega328 juga mendukung komunikasi I2C (TWI) dan SPI. Perangkat lunak Arduino termasuk perpustakaan Wire digunakan untuk menyederhanakan penggunaan bus I2C. Untuk komunikasi SPI, menggunakan datasheet ATmega168 atau ATmega328.
2.1.8 Memory
ATmega168 memiliki 16 KB flash memory untuk menyimpan kode (2 KB digunakan untuk bootloader), sedangkan ATmega328 memiliki flash memory sebesar 32 KB, (juga dengan 2 KB digunakan untuk bootloader). ATmega168 memiliki 1 KB memory pada SRAM dan 512 byte pada EEPROM (yang dapat dibaca dan ditulis dengan perpustakaan EEPROM). Sedangkan ATmega328 memiliki 2 KB memory pada SRAM dan 1 KB pada EEPROM.
2.1.9 Reset (Software)
Daripada menekan tombol reset sebelum upload, Arduino Nano didesain dengan cara yang memungkinkan pengguna untuk me-reset melalui perangkat lunak yang berjalan pada komputer yang terhubung. Salah satu jalur kontrol hardware (DTR) mengalir dari FT232RL dan terhubung ke jalur reset dari ATmega168 atau ATmega328 melalui kapasitor 100 nanofarad. Bila jalur ini di- set rendah/low, jalur reset drop cukup lama untuk me-reset chip. Perangkat lunak Arduino menggunakan kemampuan ini untuk memungkinkan Anda meng-upload kode dengan hanya menekan tombol upload pada perangkat lunak Arduino. Ini berarti bahwa bootloader memiliki rentang waktu yang lebih pendek, seperti menurunkan DTR dapat terkoordinasi (berjalan beriringan) dengan dimulainya upload.
Pengaturan ini juga memiliki implikasi lain. Ketika Arduino Nano terhubung dengan komputer yang menggunakan sistem operasi Mac OS X atau Linux, papan Arduino akan di-reset setiap kali dihubungkan dengan software komputer (melalui USB). Dan setengah detik kemudian atau lebih, bootloader berjalan pada papan Arduino Nano. Proses reset melalui program ini digunakan untuk mengabaikan data yang cacat (yaitu apapun selain meng-upload kode baru), ia akan memotong dan membuang beberapa byte pertama dari data yang dikirim ke papan setelah sambungan terbuka. Jika sebuah sketsa dijalankan pada papan untuk menerima satu kali konfigurasi atau menerima data lain ketika pertama kali dijalankan, pastikan bahwa perangkat lunak diberikan waktu untuk berkomunikasi dengan menunggu beberapa detik setelah terkoneksi dan sebelum mengirim data.
2.2 Load Cell
Load cell merupakan sensor timbangan yang bekerja secara mekanis, dimana load cell menggunakan prinsip tekanan yang memanfaatkan strain gauge sebagai pengindera (sensor). Strain Gauge adalah sebuah tranduser pasif yang merubah suatu pergeseran mekanis menjadi perubahan tahanan.
Gambar 2.4 Load Cell
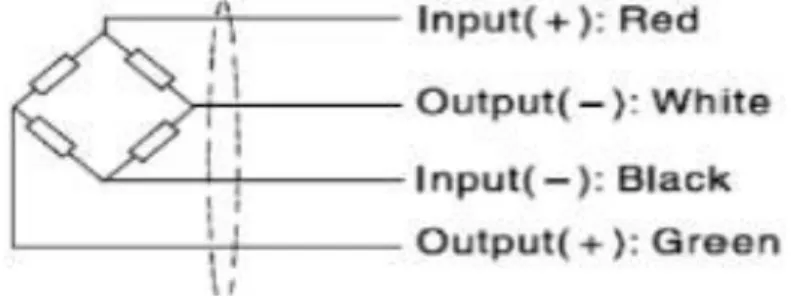
Keterangan gambar 2.4 bentuk fisik loadcell:
a. Kabel merah adalah input tegangan sensor.
b. Kabel hitam adalah input ground sensor.
c. Kabel hijau adalah output positif sensor.
d. Kabel putih adalah output ground sensor.
Gambar 2.5. adalah konfigurasi kabel dari sensor load cell, yang terdiri dari kabel berwarna merah, hitam, biru, dan putih. Kabel merah merupakan input tegangan sensor, kabel hitam merupakan input ground pada sensor, kabel warna biru / hijau merupakan output positif dari sensor dan kabel putih adalah output ground dari sensor. Nilai tegangan output dari sensor ini sekitar 1,2 mV.
Gambar 2.5 Konfigurasi Kabel Sensor Load Cell
2.2.1 Prinsip Kerja Load Cell
Ketika bagian lain yang lebih elastic mendapat tekanan, maka pada sisi lain akan mengalami perubahan regangan yang sesuai dengan yang dihasilkan oleh strain gauge, hal ini terjadi karena ada gaya yang seakan melawan pada sisi lainnya. Perubahan nilai resistansi yang diakibatkan oleh perubahan gaya diubah
menjadi nilai tegangan oleh rangkaian pengukuran yang ada. Dan berat dari objek yang diukur dapat diketahui dengan mengukur besarnya nilai tegangan yang timbul. Sel beban (load cell) terdiri dari satu buah strain gauge atau lebih, yang ditempelkan pada batang atau cincin logam. Sel beban dikalibrasikan oleh pabrikan yang bersangkutan. Piranti ini dirancang untuk mengukur gaya tekanan mekanis, gaya pemampatan (kompresi), atau gaya puntir yang bekerja pada sebuah objek. Ketika batang atau cincin logam piranti ini berada dibawah tekanan, tegangan yang timbul pada terminal-terminalnya yang dapat dijadikan rujukan untuk mengukur besarnya gaya.
2.2.2 Spesifikasi Load Cell
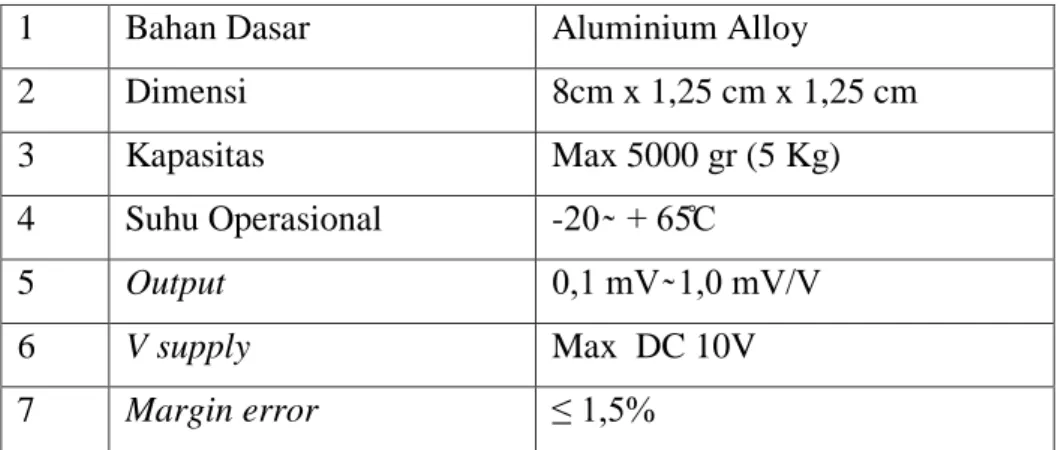
Tabel 2.2 Spesifikasi Load Cell.
1 Bahan Dasar Aluminium Alloy
2 Dimensi 8cm x 1,25 cm x 1,25 cm
3 Kapasitas Max 5000 gr (5 Kg)
4 Suhu Operasional -
5 Output m m
6 V supply Max DC 10V
7 Margin error ≤ %
2.2.3 Analog to Digital Converter (ADC)
Rangkaian konversi analog ke digital (ADC) berfungsi mengubah hasil keluaran dari load cell yang masih berupa tegangan menjadi isyarat digital agar mudah dibaca dan diproses oleh komputer.
ADS7822 merupakan pengubah data analog menjadi digital (ADC) 12-bit dengan besar tegangan masukan antara 2.7 Volt hingga 5.25 Volt. ADC ini hanya memerlukan tegangan yang sangat kecil walaupun bekerja pada frekuensi penuh 75 kHz. Memiliki kemampuan resolusi sebesar 12-bit, artinya kemampuan ini dapat meng-konversi sinyal analog dari 0,99 volt – 5 volt menjadi data digital 12 bit. ADS7822 memiliki kapasitor internal untuk memproses data sampling dan holding-nya dalam pengubahan ke digital. Proses digitalisasi pada sistem
ADS7822 merupakan rangkaian konversi ke digital 12bit (212) = 4096 bits.
Konfigurasi pin dari ADS7822 dapat dilihat pada gambar 2.6.
Gambar 2.6 Konfigurasi pin ADS7822
Fungsi dari setiap pin ADS7822 yaitu sebagai berikut:
1 VREF merupakan tegangan masukan referensi.
2 +In merupakan non-inverting input atau masukan tidak membalik.
3 –In merupakan inverting input atau masukan pembalik.
4 GND merupakan pin ground.
5 CS/SHDN, Chip Select when LOW, shutdown Mode when HIGH.
6 DOUT merupakan pin keluaran.
7 DCLOCK merupakan pin data clock yang telah disinkronisasi dengan serial data transfer.
8 +Vcc untuk power supply.
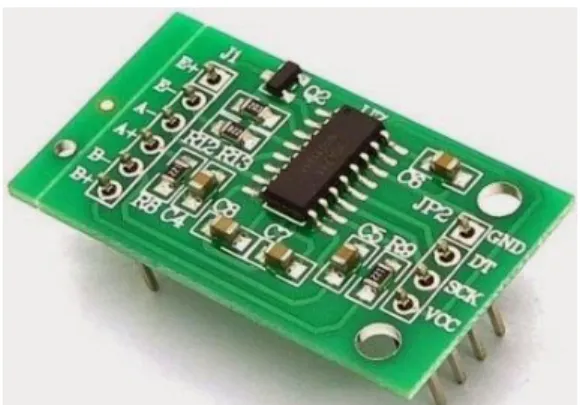
2.3 Modul Penguat HX711
HX711 24-Bit Analog to Digital Converter (ADC) for Weigh Scales hx7 adalah sebuah komponen dari perusahan dari “ AVIA SEMICONDUCTOR
”. HX7 presisi 4-bit analog to digital conventer (ADC) yang didesain untuk sensor timbangan digital (weigh scales) dan industrial control aplikasi yang terkoneksi dengan sensor jembatan (bridge sensor). Modul ini digunakan untuk converter sinyal analog yang dikirimkan load cell menjadi sinyal digital dan diteruskan ke Arduino.
HX711 adalah modul timbangan, yang memiliki prinsip kerja mengkonversi perubahan yang terukur dalam perubahan resistansi dan mengkonversinya ke dalam besaran tegangan melalui rangkaian yang ada. Modul
melakukan komunikasi dengan computer/mikrokontroler melalui TTL232.
Struktur yang sederhana, mudah dalam penggunaan, hasil yang stabil dan reliable, memiliki sensitivitas tinggi, dan mampu mengukur perubahan dengan cepat.
HX711 biasanya digunakan pada bidang aerospace, mekanik, elektrik, kimia, konstruksi, farmasi dan lainnya, digunakan untuk mengukur gaya, gaya tekanan,perpindahan, gaya tarikan, torsi, dan percepatan.
2.3.1 Fitur Modul Penguat HX711
Fitur IC HX711 adalah sebagai dibawah berikut :
a. Differential input voltage: ±40mV(Full-scale differential input voltage
± 40mV).
b. Data accuracy: 24 bit (24 bit A / D converter chip).
c. Refresh frequency: 80 Hz.
d. Operating Voltage : 5V DC.
e. Operating current : <10 mA.
f. Size:38mm*21mm*10mm.
Gambar 2.7. Modul Penguat HX711
2.3.2 Kelebihan Modul Penguat HX711
Struktur yang sederhana, mudah dalam penggunaan, hasil yang stabil dan reliable, memiliki sensivitas tinggi, dan mampu mengukur perubahan dengan cepat.
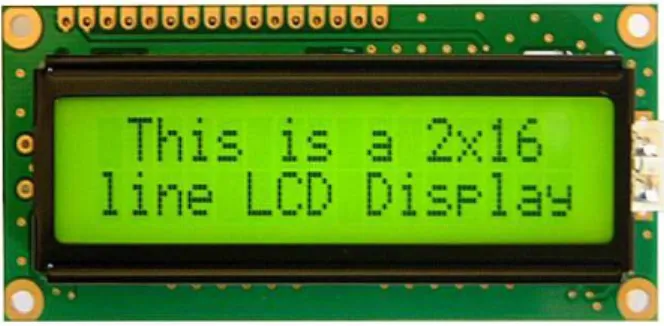
2.4 Liquid Crystal Display (LCD)
LCD ( Liquid Crystal Display ) merupakan salah satu perangkat penampil yang sekarang ini mulai banyak digunakan. Penampil LCD mulai dirasakan menggantikan fungsi dari CRT (Cathode Ray Tube), yang sudah berpuluh-puluh tahun digunakan manusia sebagai penampil gambar/text baik monokrom (hitam dan putih), maupun yang berwarna. Teknologi LCD memberikan keuntungan dibandingkan dengan teknologi CRT, karena pada dasarnya CRT adalah tabung triode yang digunakan sebelum transistor ditemukan. Beberapa keuntugan LCD dibandingkan dengan CRT adalah konsumsi daya yang relative kecil, lebih ringan, tampilan yang lebih bagus, dan ketika berlama-lama di depan monitor, monitor CRT lebih cepat memberikan kejenuhan pada mata dibandingkan dengan LCD.
Adapun bentuk fisik LCD 2 x 16 seperti pada Gambar 2.8.
Gambar 2.8 LCD 2 x 16
LCD memanfaatkan silicon atau gallium dalam bentuk Kristal cair sebagai pemendar cahaya. Pada layar LCD, setiap matrik adalah susunan dua dimensi piksel yang dibagi dalam baris dan kolom. Dengan demikian, setiap pertemuan yang merupakan lempengan kaca bagian belakang dengan sisi dalam yang ditutupi oleh lapisan elektroda transparan. Dalam keadaan normal, cairan yang digunakan memiliki warna cerah. Daerah-daerah tertentu pada cairan akan berubah warnanya menjadi hitam ketika tegangan diterapkan antara bidang latar dan pola elektroda yang terdapat pada sisi dalam lempeng kaca bagian depan.
Keunggulan LCD adalah hanya menarik arus yang kecil (beberapa micro ampere), sehingga alat atau sistem menjadi portable karena dapat menggunakan catu daya yang kecil. Keunggulan lainnya adalah tampilan yang diperlihatkan dapat dibaca dengan mudah di bawah terang sinar matahari. Di bawah sinar
cahaya yang remang-remang dalam kondisi gelap, sebuah lampu (berupa LED) harus dipasang dibelakang layar tampilan.
LCD yang digunakan adalah jenis lCD yang menampilkan data dengan 2 baris tampilan pada display. Keuntungan dari LCD ini adalah :
1. Dapat menampilkan karakter ASCII, sehingga dapat memudahkan untuk membuat program tampilan.
2. Mudah dihubungkan dengan port I/O karena hanya menggunakan 8 bit data dan 3 bit control.
3. Ukuran modul yang proporsional.
4. Daya yang digunakan relative sangat kecil.
Untuk lebih jelasnya berikut adalah Tabel konfigurasi LCD 2x16 yang ditunjukkan pada gambar 2.9.
Gambar 2.9 Konfigurasi Pin LCD
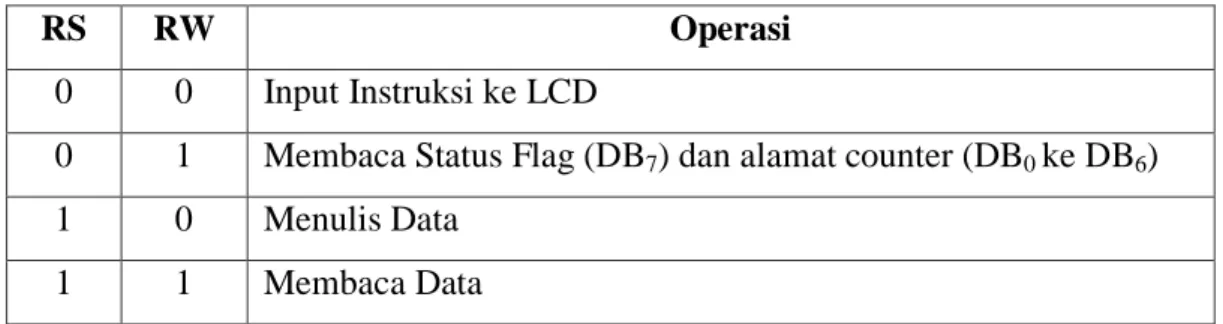
Operasi dasar pada LCD terdiri dari empat, yaitu instruksi mengakses proses internal, instruksi menulis data, instruksi membaca kondisi sibuk, dan instruksi membaca data. ROM pembangkit sebanyak 192 tipe karakter, tiap karakter dengan huruf 5x7 dot matrik. Kapasitas pembangkit RAM 8 tipe karakter (membaca program), maksimum pembacaan 80x8 bit tampilan data. Perintah utama LCD adalah Display Clear, Cursor Home, Display ON/OFF, Display Character Blink, Cursor Sihft, dan Display Shift. Tabel 2.3 menunjukkan operasi dasar LCD.
Tabel 2.3 Operasi Dasar LCD
RS RW Operasi
0 0 Input Instruksi ke LCD
0 1 Membaca Status Flag (DB7) dan alamat counter (DB0 ke DB6) 1 0 Menulis Data
1 1 Membaca Data
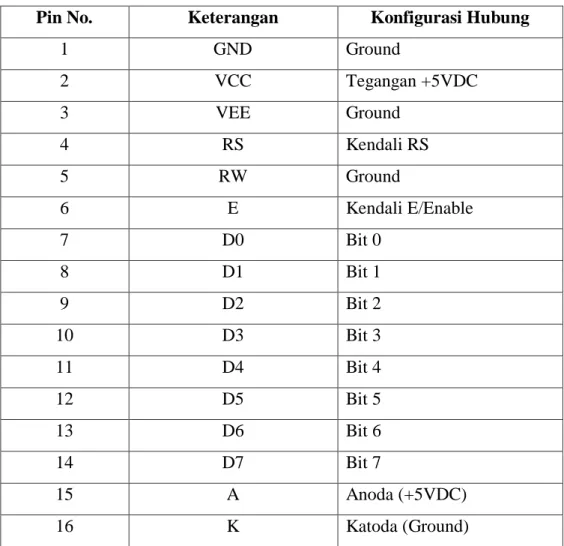
Tabel 2.4 Konfigurasi Pin LCD
Pin No. Keterangan Konfigurasi Hubung
1 GND Ground
2 VCC Tegangan +5VDC
3 VEE Ground
4 RS Kendali RS
5 RW Ground
6 E Kendali E/Enable
7 D0 Bit 0
8 D1 Bit 1
9 D2 Bit 2
10 D3 Bit 3
11 D4 Bit 4
12 D5 Bit 5
13 D6 Bit 6
14 D7 Bit 7
15 A Anoda (+5VDC)
16 K Katoda (Ground)
Tabel 2.5 Konfigurasi LCD
Pin Bilangan Biner Keterangan
RS 0 Inisialisasi
1 Data
RW 0 Tulis LCD / W (write)
1 Baca LCD / R (read)
E 0 Pintu data terbuka
2 Pintu data tertutup
Lapisan film yang berisi kristal cair diletakkan di antara dua kempeng kaca yang telah ditanami elektroda logam transparan. Saat tegangan dicatukan pada beberapa pasang elektroda, molekul-molekul kristal cair akan menyusun diri agar cahaya yang mengenainya akan dipantulkan atau diserap. Dari hasil
pemantulan atau penyerapan cahaya tersebut akan terbentuk pola huruf, angka, atau gambar sesuai yang di aktifkan.
LCD membutuhkan tegangan dan daya yang kecil sehingga sangat popular untuk aplikasi pada kalkulator, arloji digital, dan instrument elektronika, lain seperti Global Positioning System (GPS), baragraph display dan multimeter digital. LCD umumnya dikemas dalam bentuk Dual In Line Package (DIP) dan mempunyai kemampuan untuk menampilkan beberapa kolom dan baris dalam satu panel. Untuk membentuk pola, baik karakter maupun gambar pada kolom dan baris secara bersamaan digunakan metode Screening.
Metode screening adalah mengaktifkan daerah pertolongan suatu kolom dan suatu baris secara bergantian dan cepat sehingga seolah-olah aktif semua.
Penggunaan metode ini dimaksudkan untuk menghemat jalur yang digunakan untuk mengaktifkan panel LCD. Saat ini telah dikembangkan berbagai jenis LCD, mulai jenis LCD biasa, Passive Matrix LCD (PWLCD), hingga Thin-Film Transistor Active Matrix (IFT-AMLCD). Kemampuan LCD juga telah ditingkatkan dari yang monokrom hingga yang mampu menampilkan ribuan warna tersebut selain untuk loader ketika mem-program, bisa juga difungsikan sebagai port komunikasi serial.
Arduino menyediakan 20 pin I/O, yang terdiri dari 6 pin input analog dan 14 pin digital input/output. Untuk 6 pin analog sendiri bisa juga difungsikan sebagai output digital jika diperlukan output digital tambahan selain 14 pin yang sudah tersedia. Untuk mengubah pin analog menjadi digital cukup mengubah konfigurasi pin pada program.
Dalam board kita bisa lihat pin digital diberi keterangan 0-13, jadi untuk menggunakan pin analog menjadi output digital, pin analog yang pada keterangan board 0-5 kita ubah menjadi pin 14-19. Dengan kata lain pin analog 0-5 berfungsi juga sebagi pin output digital 14-16.Sifat open source arduino juga banyak memberikan keuntungan tersendiri untuk kita dalam menggunakan board ini, karena dengan sifat open source komponen yang kita pakai tidak hanya tergantung pada satu merek, namun memungkinkan kita bisa memakai semua komponen yang ada dipasaran. Bahasa pemrograman arduino merupakan bahasa C yang sudah disederhanakan syntax bahasa pemrogramannya sehingga
mempermudah kita dalam mempelajari dan mendalami mikrokontroller. Deskripsi Arduio UNO:
2.5 Buzzer
Buzzer adalah sebuah komponen elektronika yang berfungsi untuk mengubah getaran listrik menjadi getaran suara. Pada dasarnya prinsip kerja buzzer hampir sama dengan loud speaker, jadi buzzer juga terdiri dari kumparan yang terpasang pada diafragma dan kemudian kumparan tersebut dialiri arus sehingga menjadi elektromagnet, kumparan tadi akan tertarik ke dalam atau keluar, tergantung dari arah arus dan polaritas magnetnya, karena kumparan dipasang pada diafragma maka setiap gerakan kumparan akan menggerakkan diafragma secara bolak-balik sehingga membuat udara bergetar yang akan menghasilkan suara.
Gambar 2.10 Buzzer
Buzzer elektronik ini dapat diciptakan dengan merangkaikan beberapa komponen yang pada prinsipnya alat ini dapat menimbulkan pulsa dimana arus listrik adalah sebagai indikator terciptanya pulsa tersebut. Pada pembuatan alat ini, kami menggunakan IC NE555 sebagai sistem pembangkit pulsa yang tentunya arus listrik adalah indikator utama daripada pembangkit sinyalnya. Namun IC NE555 bukanlah satu-satu komponen yang digunakan. Disini kami menambahkan beberapa komponen pelengkap yang sama bergunanya dalam pembuatan alat ini.
Komponen – komponen itu antara lain adalah 1 buah potensiometer 10k, 2 buah kapasitor uF buah kapasitor uF buah I NE buah Speaker 8Ω 0,5watt, 1 buah baterai 9volt, dan 1 buah transistor NPN 9013.
2.6 Sistem Otomatis
Otomatis mengandung pengertian sebagai suatu yang bekerja dengan sendirinya. Maksud dari pengertian di atas adalah sebuah perangkat/alat yang
bekerja secara sendiri sesuai dengan fungsinya, tanpa menunggu perintah dari luar. Sedangkan sistem memiliki pengertian sebagai susunan beberapa unsur/perangkat yang secara teratur saling berkaitan membentuk satu kesatuan secara totalitas.
Jadi sistem otomatis dapat dinyatakan sebagai susunan beberapa perangkat yang masing-masing memiliki fungsi yang berbeda namun saling berkaitan membentuk satu kesatuan dengan secara terus menerus memeriksa kondisi masukan yang mempengaruhi untuk kemudian melaksanakan pekerjaan sesuai dengan fungsinya secara otomatis atau dengan sendirinya. Beberapa sistem kecil dapat digabungkan menjadi sebuah sistem yang lebih besar dan kompleks.
2.7 Muatan Berlebih (OverLoading)
Beban berlebih (overloading) adalah jumlah berat muatan kendaraan angkutan penumpang, mobil barang, kendaraan khusus, truk gandengan dan truk trailer yang diangkut melebihi dari jumlah yang di ijinkan (JBI) atau muatan sumbu terberat (MST) melebihi kemampuan kelas jalan yang ditetapkan.
Disamping adanya beban berlebih (overloading) pada kendaraan yang mengangkut muatan melebihi ketentuan batas beban yang ditetapkan yang secara signifikan akan meningkatkan daya rusak (VDF = vehicle damage faktor) kendaraan yang selanjutnya akan memperpendek umur pelayanan jalan.
2.8 KiCad E.D.A
Kicad adalah software rangkaian elektronik gratis (open source) untuk desain otomatisasi elektronik. software ini memfasilitasi skema desain untuk sirkuit elektronik dan mengkonversinya sebagai desain PCB. Kicad pada awalnya dikembangkan oleh Jean-Pierre Charras, dan fitur lingkungan yang terintegrasi untuk meng-capture skema dan desain layout PCB. Terdapat tools yang sangat lengkap dalam paket software ini yaitu untuk membuat tagihan bahan, karya seni, file Gerber, dan pandangan 3D dari PCB dan komponen-komponennya.
Kicad diciptakan pada tahun 1992 oleh Jean-Pierre Charras saat bekerja di IUT de Saint Martin d'Heres. Sejak itu kicad telah memperoleh sejumlah relawan dan kontribusi. Khususnya pada tahun 2013 CERN BE-CO-HT bagian mulai
berkontribusi sumber daya terhadap kicad untuk membantu mendorong pengembangan perangkat keras open source dengan membantu meningkatkan kicad menjadi setara dengan alat EDA komersial.
Dapat dilihat pada panel control ada beberapa fitur yang bisa kita gunakan (dari kiri ke kanan) :
a.) Eeschema (schematic Editor).
b.) CvPCB (component to modules).
c.) PCBnew( PCB Editor).
d.) GerbView (Gerber Viewer).
e.) Bitmap to component ...
f.) PCB Kalkulator.
Gambar 2.11 Schematic KidCat
Gambar 2.12 Layout KidCat
BAB III
PERANCANGAN DAN PEMBUATAN
3.1 Waktu dan Tempat
Perancangan ini telah dilakukan pada bulan Februari sampai April 2018 di Sikonek, rumah tinggal Johor, dan Perpustakaan Universitas Sumatera Utara.
3.2 Alat dan Bahan 3.2.1 Alat yang Digunakan
1. Satu set komputer berfungsi untuk pengelolaan data dan pemrograman.
2. Bor listrik berfungsi untuk melubangi material.
3. Solder berfungsi untuk mencairkan timah dan menyambungkan beberapa komponen elektronik.
4. Obeng berfungsi untuk memasang baut dan mur.
5. Mesin potong triplek berfungsi untuk memotong triplek.
6. Attractor berfungsi sebagai alat penyedot timah pada PCB.
7. Gunting Berfungsi sebagai alat untuk memotong karton.
3.2.2 Bahan yang Digunakan
1. Mur dan baut berfungsi sebagai peguat dalam pemasangan komponen pada papan triplek.
2. Akrilik berfungsi sebagai pelindung komponen pada alat bagian bawah.
3. Spacer berfungsi sebagai penyanggah antara akrilik dengan triplek.
4. Papan triplek berfungsi sebagai tempat meletakkan alat dan juga sebagai dasar penempatan alat.
5. Arduino Nano berfungsi sebagai mikrokontroler.
6. Sensor Load Cell berfungsi untuk mendeteksi adanya tekanan.
7. IC HX711 berfungsi sebagai penguat hasil pembacaan dari tekanan yang diberikan.
8. LCD (Liquid Crystal Display) berfungsi untuk menampilkan status kerja alat.
9. Buzzer berfungsi sebagai tanda peringatan (mengeluarkan bunyi) apabila kadar gas buang melebihi ambang batas udara bersih.
10. Batu Timbangan berfungsi sebagai acuan dasar dalam proses kalibrasi alat.
11. Adaptor berfungsi sebagai supply tegangan.
3.3 Spesifikasi Sistem
Dalam sepesifikasi sistem alat proteksi beban muatan berlebih ini akan dibahas mengenai perancangan dan pembuatan perangkat keras serta perangkat lunak pendukungnya. Rangkaian yang digunakan terdiri dari Power Supply, Loadcell, HX711, ATMega 328, LCD, Buzzer.
Ketika rangkaian secara keseluruhan sudah diberikan power maka jika terjadi sebuah tekanan atau beban maka load cell akan membaca perubahan nilai yang sudah di convert ke g. Dengan tampilan output di LCD, alat ini juga memiliki peringatan atau alarm sebagai perbandingan jika berat melebihi maka Buzzer otomatis hidup yang dirancang sesuai diagram blok yang terdapat pada gambar berikut.
Gambar 3.1 Diagram Blok Sistem
3.3.1 Fungsi Diagram Blok
1. Blok Power Supply; Sebagai penyedia tegangan tegangan ke sistem dan sensor.
2. Blok Load Cell; adalah Inputan Massa dan di ubah menjadi sinyal digital.
3. Blok Module HX711; Sebagai pengkondisi sinyal data dari load cell ke 24 bit.
4. Blok Mikrokontroller; Mengkonversi data dari sensor Load Cell ke LCD.
5. Blok LCD 2x16; Sebagai output tampilan.
6. Blok Buzzer; sebagai Output dari sensor Input.
3.3.2 Rangkaian Power Supply
Mikrokontroler, sensor dan komponen komponen elektonika, kebanyakan menggunakan tegangan 5v untuk menstabilkan tegangan dapat menggunakan ICLM7805, yang berfungsi sebagai penstabil tegangan, dan mempertahankan output tetap 5 volt.
Gambar 3.2 Rangkaian Power Supply
3.3.3 Rangkaian HX711 dan Load Cell
Rangkaian sensor yang digunakan adalah sensor berat. Pada rangkaian ini berisi dua modul : single point load cell 5 Kg berbahan Alluminium-alloy dan modul ADC (Analog-to-Digital Converter) 24 Bit berpresisi sangat tinggi menggunakan IC HX711 Weigh Scale Sensor yang memang dirancang khusus untuk penggunaan pada sensor berat.
Karena perbedaan yang terukur sangat kecil dalam orde μV (mikro Volt, seper sejuta Volt), dibutuhkan rangkaian pengubah sinyal analog menjadi digital yang sangat presisi, untuk itulah pada kit ini disertai dengan modul HX711 yang beresolusi 24 bit (16,7+juta undakan pada tangga ADC).
Gambar 3.3 Rangkaian HX711 dan Load Cell
Load cell merupakan sensor yang dirancang untuk mendeteksi tekanan atau berat sebuah beban, sensor load cell umumnya digunakan sebagai komponen utama pada sistem timbangan digital dan dapat diaplikasikan pada jembatan timbangan yang berfungsi untuk menimbang berat dari truk pengangkut bahan baku, pengukuran yang dilakukan oleh Load Cell menggunakan prinsip tekanan.
Prinsip kerjanya selama proses penimbangan, beban yang diberikan mengakibatkan reaksi terhadap elemen logam pada load cell yang mengakibatkan perubahan bentuk secara elastis. Gaya yang ditimbulkan oleh regangan ini (positif atau negatif) dikonversikan kedalam sinyal elektrik oleh strain gauge yang terpasang pada spring element.
3.3.4 Rangkaian ATMega328
Mikrokontroller yang digunakan adalah ATMega 328 adalah mikrokontroller keluaran dari atmel yang mempunyai arsitektur RISC (Reduce Instruction Set Compiler) yang dimana setiap proses eksekusi data lebih cepat daripada arsitektur CSIC (Completed Instruction Set Computer). Berikut adalah gambar rangkaian ATMega 328 yang dibuat dengan menggunakan software KiCad E.D.A.
Gambar 3.4 Rangkaian Arduino Nano
3.3.5 Rangkaian Liquid Crystal Display (LCD)
Pada alat ini, display yang digunakan adalah Liquid Crystal Display (LCD) merupakan suatu media penampilan data yang sangat efektif dan efisien dalam penggunaannya. Untuk menampilkan sebuah karakter pada layar LCD diperlukan beberapa rangkaian tambahan. Dan untuk blok ini tidak ada komponen tambahan karena mikrokontroler dapat member data langsung ke LCD, pada LCD sudah terdapat driver untuk mengubah data ASCII output mikrokontroler menjadi tampilan karakter.
Gambar 3.5 Rangkaian LCD
Pemasangan trimpot sebesar KΩ untuk mengatur kontras karakter yang tampil. Pin I/O dua arah dan pin fungsi khusus, yaitu sebagai Timer/Counter, komperator analog dan SPI mempunyai fungsi khusus sebagai pengiriman data secara serial. Sehingga nilai yang akan tampil pada LCD display akan dapat dikendalikan oleh Arduino Uno.
3.3.6 Rangkaian Buzzer
Rangkaian keluaran yang digunakan salah satunya ialah buzzer. Dengan spesifikasi 5 volt, oleh karena itu buzzer langsung dapat dihubungkan ke port mikrokontroller tanpa perlu rangkaian tambahan lagi. Buzzer dihubungkan pada pin 11 Arduino ke kaki 2 buzzer seperti Gambar 3.6 berikut.
Gambar 3.6 Rangkaian Buzzer
3.4 Rangkaian Keseluruhan
Rangkaian Keseluruhan ini dibuat secara sederhana dengan menggunakan ATmega 328 sebagai mikrokontroller dan LoadCell sebagai sensor berat dimana nilai berat yang akan dibaca oleh IC HX711 dengan tampilan keluaran pada LCD.
Dan jika berat melebihi batas yang sudah ditentukan maka secara otomatis buzzer mengeluarkan suara (alarm).
Berikut adalah gambar Perencanaan Sistem Otomatisasi Alat Proteksi Beban Muatan Menggunakan Load Cell Berbasis Atmega 328 yang dibuat dengan menggunakan software KiCad E.D.A.
Gambar 3.7. Rangkaian Keseluruhan.
3.5 Perancangan Printed Circuit Board (PCB)
Printed Circuit Board (PCB) adalah sebuah papan rangkaian yang terbuat dari bahan ebonite (Pertinax) atau fiber glass dimana salah satu sisi permukaanya dilapisi dengan tembaga tipis. Berdasarkan susunan PCB terbagi menjadi tiga jenis, yang pertama PCB Single Layer merupakan PCB polos yang hanya memiliki 1 lapisa tembaga pada salah satu sisinya. PCB Double Layer merupakan PCB polos yang memiliki 2 lapisan tembaga pada kedua sinyal dan PCB Matrik
Strip Board merupakan PCB yang memiliki 1 sisi tembaga dan memiliki lubang- lubang dengan ukuran normal 0,8 – 1mm.
Perancangan PCB pada pembuatan sistem otomatisasi alat proteksi beban ini menggunakan software KiCad E.D.A. Kicad adalah software rangkaian elektronik gratis (opensource) untuk desain otomatisasi elektronik. Software ini memfasilitasi skema desain untuk sirkuit elektronik dan mengkonversinya sebagai desain PCB.
Dengan perancangan yang tepat akan didapatkan layout jalur PCB tersusun rapi dan mudah digunakan. Lebar dan jarak antara jalur juga harus diperhitungkan agar tidak terjadi kesalahan atau hubungan singkat akibat jalur yang terlalu rapat dan sempit. Perancangan tata letak PCB dapat dilihat pada gambar 3.8.
Gambar 3.8 Tata Letak Jalur PCB
3.6 Software Pemrograman dan Program Sensor 3.6.1 Software Arduino.cc 1.7.11
Bahasa C merupakan salah satu bahasa yang cukup popular dan handal untuk pemrograman mikrokontroler. Dalam melakukan pemrograman mikrokontroler diperlukan suatu software pemrograman, salah satunya yang mendukung bahasa c adalah Arduino.cc. Software Arduino.cc hanya digunakan untuk mikrokontroler keluarga arduino saja.
Gambar 3.9 Software Arduino.cc
3.6.2 Program Sensor Berat
Persiapan pertama sebelum memasukkan program adalah menghubungkan mikrokontroler arduino dengan PC melalui USB port. Langkah berikutnya adalah membuka sotware arduino.cc, langkah selanjutnya adalah penulisan program pada software, berikut ini adalah program yang di tuliskan pada software.
#include <LiquidCrystal.h>// memasukkan library lcd const int rs = 4, en = 3, d4 = 5, d5 = 6, d6 = 7, d7 = 8;
LiquidCrystal lcd(rs, en, d4, d5, d6, d7); // inisialisasi pin lcd
#include "HX711.h"// memasukkan file.h dari library HX711
HX711 scale(9, 10);// menggabungkan inisialisasi SHT ke pin dt,sck Pada HX711
float calibration_factor = 4540;//4630;//2230; // this calibration factor is adjusted according to my load cell
float units;
float ounces;
float beratmaksimal=59;
int buzzer=11;
void setup() { //program utama yang dijalankan pinMode(buzzer,OUTPUT); //Inisialisasi Pin Buzzer sebagai output lcd.begin(16, 2);
Serial.begin(9600);
lcd.print(" Selamat Datang ");
Serial.println("HX711 calibration sketch");
Serial.println("Remove all weight from scale");
Serial.println("After readings begin, place known weight on scale");
Serial.println("Press + or a to increase calibration factor");
Serial.println("Press - or z to decrease calibration factor");
scale.set_scale();
scale.tare(); //Reset the scale to 0
long zero_factor = scale.read_average(); //Get a baseline reading
Serial.print("Zero factor: "); //This can be used to remove the need to tare the scale. Useful in permanent scale projects.
Serial.println(zero_factor);
//Menghidupkan dan mematikan buzzer digitalWrite(buzzer,1);
delay(500);
digitalWrite(buzzer,0);
delay(100);
}
void loop() {
scale.set_scale(calibration_factor); //Adjust to this calibration factor
Serial.print("Reading: ");
units = scale.get_units(), 10;
units=units*10;
if (units < 0) {
units = 0.00;
}
//Rumus merubah nilai sensor ke satuan grams ounces = units * 0.35274; //0.035274
Serial.print(units);
Serial.print(" grams");
Serial.print(" calibration_factor: ");
Serial.print(calibration_factor);
Serial.println();
// Menampilkan berat ke LCD lcd.setCursor(0,1);
lcd.print("Berat: ");
lcd.setCursor(7,1);
lcd.print(units,1);
lcd.print(" gram");
if(Serial.available())//Mengatur beban awal ke nol {
char temp = Serial.read();
if(temp == '+' || temp == 'a')
calibration_factor += 10;//100 else if(temp == '-' || temp == 'z') calibration_factor -= 10;
}
if(units>=beratmaksimal){//Kalau berat melebihi batas maksimal lcd.setCursor(0,0);
lcd.print(" Berat melebihi ");
digitalWrite(buzzer,1);
delay(500);
digitalWrite(buzzer,0);
delay(100);
}
else if(units>0){//Kalau ada benda di atas timbangan lcd.setCursor(0,0);
lcd.print(" Berat normal ");
}
else{//Kalau tidak ada benda di atas timbangan lcd.setCursor(0,0);
lcd.print(" Selamat Datang ");
} }
3.7 Flowchart Sistem
Ya
Tidak
Gambar 3.10. Flowchat Sistem Mulai
Inisialisasi Program
Masukkan Beban
Mikrokontroller Mengambil Data dari
Sensor
Apakah Beban Melebihi Kapasitas ? Menampilkan Nilai
Berat di LCD
Alarm OFF
Selesai
Alarm ON
BAB IV
PENGUJIAN RANGKAIAN
4.1 Pengujian Rangkaian Sumber Daya
Untuk supply daya pada alat ini digunakan adpator charge HP. Memiliki tegangan masukkan sebesar 100-240 volt dengan arus 0.2 Amper dan tegangan keluaran yang diberikan sebesar 5 Volt dan arus 1 Amper. Charger dihubungkan ke stopkontak yang terhubung dengan PLN kemudian dihubungkan di bagian atas di daerah papan PCB. Setelah Rangkaian Aktif (arus mengalir pada rangkaian alat) maka charger berhasil memberi masukkan tegangan kedalam alat ini. Dan dalam pengujian lat ini, charger yang digunakan dapat mengalirkan arus kedalam otomatisasi alat proteksi beban berlebih.
4.2 Pengujian Rangkaian Mikrokontroler Arduino Nano
Pengujian sistem arduino nano ini untuk memastikan bahwa sistem arduino yang digunakan pada penelitian ini tidak rusak.
Pemrograman menggunakan mode ISP (In System Programming) mikrokontroler harus dapat diprogram langsung pada papan rangkaian dan rangkaian mikrokontroler harus dapat dikenali oleh program Arduino.cc.
Pada pengujian ini berhasil dilakukan dengan dikenalinya jenis mikrokontroler oleh program downloader yaitu Arduino Nano.
Gambar 4.1. Informasi Signature Mikrokontroler Arduino Nano Apabila Chip Signature sudah dikenali dengan baik dan dalam waktu
singkat, bisa dikatakan rangkaian mikrokontroler Arduino Uno R3 bekerja dengan baik dengan mode ArduinoISP-nya.
4.3 Pengujian Rangkaian LoadCell dan IC HX711
Pengujian sensor berat dilakukan dengan cara melihat respon sensor apabila sensor diberi tekanan berupa beban antara sensor dengan objek dan apabila tidak diberi beban. Dan juga untuk menentukan berat beban normal dan berat beban melebihi dari sensor.
Pengujian ini bertujuan, baik atau tidaknya sensor untuk di gunakan.
Berikut adalah data sensor ketika diberi beban dan tidak diberi beban dan beban berlebih diatas sensor tersebut.
Program LoadCell dan IC HX711
#include "HX711.h"
HX711 scale(9, 10);// dt,sck Pada HX711
float calibration_factor = 4540;//4630;//2230; // this calibration factor is adjusted according to my load cell
float units;
float ounces;
float beratmaksimal=59;
int buzzer=11;
void setup() {
pinMode(buzzer,OUTPUT);
lcd.begin(16, 2);
Serial.begin(9600);
lcd.print(" Selamat Datang ");
Serial.println("HX711 calibration sketch");
Serial.println("Remove all weight from scale");
Serial.println("After readings begin, place known weight on scale");
Serial.println("Press + or a to increase calibration factor");
Serial.println("Press - or z to decrease calibration factor");
scale.set_scale();
scale.tare(); //Reset the scale to 0
long zero_factor = scale.read_average(); //Get a baseline reading
Serial.print("Zero factor: "); //This can be used to remove the need to tare the scale. Useful in permanent scale projects.
Serial.println(zero_factor);
//Menghidupkan dan mematikan buzzer digitalWrite(buzzer,1);
delay(500);
digitalWrite(buzzer,0);
delay(100);
}
void loop() {
scale.set_scale(calibration_factor); //Adjust to this calibration factor
Serial.print("Reading: ");
units = scale.get_units(), 10;
units=units*10;
if (units < 0) {
units = 0.00;
}
//Rumus merubah nilai sensor ke satuan grams
ounces = units * 0.35274;//0.035274 Serial.print(units);
Serial.print(" grams");
Serial.print(" calibration_factor: ");
Serial.print(calibration_factor);
Serial.println();
4.4 Pengujian Rangkaian LCD
Pengujian ini dilakukan dengan cara melihat status lcd apakah hidup atau tidak saat sensor berat atau sensor hx711 membaca beban ketika beban diletakkan di atas loadcell. Dari hasil pengujian di dapatkan hasil yaitu disaat sensor berat mendeteksi beban maka lcd akan aktif. Untuk cara kerja lcd, ketika beban lebih dari 59 gram maka lcd akan menampilkan keluaran "berat melebihi", dan ketika sensor membaca beban kurang dari 59 gram maka lcd akan menapilkan tampilan
"berat normal". Berdasarkan keterangan di atas adapun program yang diisikan ke mikrokontroller untuk lcd adalah sebagai berikut:
#include <LiquidCrystal.h>
LiquidCrystal lcd(13, 12, 7, 6, 5, 4);
void setup() { lcd.begin(16, 2);
lcd.setCursor(0, 1);
lcd.print("Berat: ");
lcd.setCursor(7, 1);
lcd.print("units,1");
lcd.print(" gram");
lcd.setCursor(0,0);
lcd.print(" Selamat Datang ");
}
Gambar 4.2 Hasil Pengujian LCD
4.5 Pengujian Rangkaian Buzzer
Pengujian ini dilakukan dengan cara melihat status Buzzer apakah aktif atau tidak saat sensor berat atau sensor hx711 mendeteksi beban benda. Dari hasil pengujian di dapatkan hasil yaitu disaat sensor hx711 mendeteksi berat benda yang melebihi kapasitas maka Buzzer akan aktif.
//Menghidupkan dan mematikan buzzer digitalWrite(buzzer,1);
delay(500);
digitalWrite(buzzer,0);
delay(100);
}
4.6 Gambar Pengujian Alat
Gambar 4.3 Pengujian Tampilan Awal
4.6.1 Pengujian Berat Normal
Beban diletakkan di atas jembatan timbang dimana dibawah nya terletak load cell dan kemudian akan dibaca oleh mikrokontroller dengan output tampilan pada LCD.
Gambar 4.4 Pengujian Beban Normal
4.6.2 Pengujian Berat Melebihi
Beban diletakkan di atas jembatan timbang dimana dibawah nya terletak load cell dan kemudian akan dibaca oleh mikrokontroller.
Gambar 4.5 Pengujian Beban MelebihI
4.6.3 Pengujian Berat Melebihi
Beban diletakkan di atas jembatan timbang dimana dibawah nya terletak load cell dan kemudian akan dibaca oleh mikrokontroller.
Gambar 4.6 Pengujian Beban Melebihi