I PENDAHULUAN
1.1 Latar Belakang
Manajemen operasi suatu industri penerbangan merupakan suatu permasalahan
Operations Research yang kompleks. Secara
umum, perusahaan dihadapkan pada berbagai persoalan dalam memenuhi permintaan calon penumpang dan upaya untuk memaksimumkan keuntungan. Misalnya, perusahaan harus memecahkan masalah menentukan rute armada dan jadwal penerbangan.
Rute armada dan jadwal penerbangan adalah aktifitas penting dalam operasi perusahaan penerbangan. Keduanya sangat mempengaruhi efisiensi penggunaan pesawat, pembuatan jadwal, perawatan pesawat dan penjadwalan awak. Hal tersebut sangat penting bagi keuntungan perusahaan, tingkat pelayanan dan kemampuan bersaing di pasar. Untuk peningkatan efisiensi penggunaan pesawat, maka dikembangkan kerangka kerja untuk penjadwalan penerbangan dan rute penerbangan yang jumlahnya besar. Kerangka kerja ini tersusun dari beberapa model strategis yang memberi nilai pada rancangan jadwal, jumlah pesawat yang siap, biaya pesawat dan data lain yang digunakan sebagai masukan sehingga tercapai pemecahan untuk keuntungan maksimum.
Proses penjadwalan penerbangan terdiri dari dua tahap yang saling bergantung, yaitu tahap pembuatan jadwal dan tahap evaluasi jadwal. Pada tahap pembuatan jadwal dikembangkan konsep jadwal berdasarkan perkiraan permintaan dan penguasaan pasar. Konsep jadwal tersebut diuji selama tahap evaluasi untuk kelayakan operasi, pertimbangan biaya dan performa. Pemeriksaan kelayakan pada tahap evaluasi terutama mencakup hal yang berkaitan dengan rute armada, ukuran armada, jadwal awak dan pengaturan perawatan. Proses penjadwalan penerbangan dilaksanakan dengan dua tahap tersebut sampai diperoleh jadwal yang diharapkan.
Ada beberapa jenis model penjadwalan penerbangan yang dikembangkan, seperti model integer linear programming untuk penerbangan dengan waktu keberangkatan tetap (Abara, 1989), model multikriteria untuk menentukan frekuensi penerbangan di bawah kondisi kompetitif (Teodorovic dan Krcmar-Nozic, 1989), model mixed integer
programming untuk rute penerbangan jauh
(Balakrishnan et al, 1990), model aliran jaringan multikomoditas untuk memecahkan
daily aircraft routing and scheduling problem
(DARSP) tanpa diketahui waktu keberangkatan (Hane et al, 1995), model set
partitioning type dan model aliran jaringan
multikomoditas dengan kendala waktu untuk memecahkan masalah DARSP berdasarkan pada serangkaian penerbangan yang diketahui waktu keberangkatannya (Desaulniers et al, 1997).
Lingkup penelitian ini terbatas pada subjek dari rute penerbangan murni operasi jadwal penerbangan dengan
Origin-Destination (OD) yang diketahui, berbagai
jenis pesawat, ukuran armada dan yang berhubungan dengan biaya data. Walaupun proses penjadwalan dalam prakteknya berhubungan erat dengan pemeliharaan pesawat terbang dan proses penjadwalan awak kapal, proses ini umumnya dipisahkan untuk memudahkan pemecahan masalah.
Model rute armada dan jadwal penerbangan diformulasikan sebagai integer
network flow problem with side constraints
(NFPWS) yang dikarakteristikan sebagai masalah NP-Complete (Garey dan Johnson, 1979). Penelitian ini menggunakan teknik jaringan ruang-waktu dalam memformulasikan model untuk masalah rute armada dan jadwal penerbangan.
1.2 Tujuan
Tujuan penulisan karya ilmiah ini adalah mempelajari model jaringan terintegrasi untuk membantu perusahaan penerbangan dalam penjadwalan dan rute penerbangan.
II LANDASAN TEORI
Untuk membuat model masalah rutearmada dan jadwal penerbangan serta mencari solusinya diperlukan beberapa pemahaman teori seperti linear
programming, integer linear programming,
graf dan metode branch and bound untuk menyelesaikan masalah integer
programming. Berikut ini akan dibahas satu
2.1 Linear Programming
Linear programming (LP) adalah suatu
model optimasi dimana fungsi tujuannya mempunyai bentuk linear dan kendalanya memiliki bentuk persamaan atau pertidaksamaan linear.
Pada tulisan ini, suatu LP mempunyai bentuk standar seperti yang didefinisikan sebagai berikut :
Definisi 1 (Bentuk Standar Suatu LP)
Suatu linear programming didefinisikan mempunyai bentuk standar:
Minimumkan z=cTx
Terhadap Ax= b 0
≥
x (1) dengan x dan c berupa vektor berukuran n, vektor b berukuran m, sedangkan A berupa matriks berukuran m× , yang disebut juga n
sebagai matriks kendala.
(Nash & Sofer, 1996)
2.1.1 Solusi suatu Linear Programming
Untuk menyelesaikan suatu masalah
Linear Programming (LP), metode simpleks merupakan salah satu metode yang dapat menghasilkan solusi optimum. Metode ini mulai dikembangkan oleh Dantzig tahun 1947. Sejak perkembangannya, metode ini adalah metode yang paling umum digunakan untuk menyelesaikan LP, yaitu berupa metode iteratif untuk menyelesaikan masalah LP dalam bentuk standar.
Pada linear programming (1), vektor x yang memenuhi kendala Ax= disebut b
sebagai solusi LP (1). Misalkan matriks A dapat dinyatakan sebagai A = (B N), dengan
B adalah matriks berukuran m× yang m
merupakan matriks yang elemennya berupa koefisien variabel basis dan N merupakan matriks yang elemennya berupa koefisien variabel nonbasis pada matriks kendala. Matriks B disebut matriks basis untuk LP. Berikut definisi matriks basis:
Definisi 2 (Matriks Basis)
Matriks B disebut matriks basis untuk LP (1) jika B adalah matriks tak singular, yaitu matriks yang determinannya tidak sama dengan nol.
(Garfinkel & Nemhausher, 1972) Misalkan x dapat dinyatakan sebagai vektor ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ = N B x x
x , dengan xB adalah vektor
variabel basis dan xN adalah vektor variabel
nonbasis. Maka Ax= dapat dinyatakan b
sebagai
(
)
⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ = N B x x N B Ax =BxB+NxN =b (2)karena B adalah matriks taksingular, maka B
memiliki invers, sehingga dari (2) xB dapat
dinyatakan sebagai :
xB =B
-1
b - B-1 NxN (3)
Definisi 3 ( Solusi Basis )
Solusi dari suatu linear programming
disebut solusi basis jika memenuhi :
xB =B
-1
b, xN = 0 (4) (Garfinkel & Nemhausher, 1972)
Definisi 4 (Solusi Fisibel Basis)
x disebut solusi fisibel basis jika x
merupakan solusi basis dan x≥0
(Nash & Sofer, 1996)
Ilustrasi solusi basis dan solusi fisibel basis dapat dilihat dalam contoh berikut:
Contoh 1
Misalkan diberikan linear programming
berikut : Minimumkan z=−2x1−3x2 terhadap −2x1+x2+x3 =4 11 2 2 4 1+ + = −x x x 5 5 1+ x = x (5) 0 , , , , 2 3 4 5 1 x x x x ≥ x
Dari linear programming tersebut didapatkan : A = ⎟ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎜ ⎝ ⎛ − − 1 0 0 0 1 0 1 0 2 1 0 0 1 1 2 , b = ⎟ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎜ ⎝ ⎛ 5 11 4 Misalkan dipilih
(
)
T B x x x x = 3 4 5 dan(
)
T N x x x = 1 2maka matriks basis
⎟ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎜ ⎝ ⎛ = 1 0 0 0 1 0 0 0 1 B
Dengan menggunakan matriks basis tersebut, diperoleh
(
)
TB B b
x = −1 = 4 11 5 ,xN =
(
0 0)
T (6)Solusi (6) merupakan solusi basis, karena solusi tersebut memenuhi kendala pada LP (5) dan kolom-kolom pada matriks kendala yang berkorespondensi dengan komponen taknol dari (6) yaitu B adalah bebas linear (kolom yang satu bukan merupakan kelipatan
dari kolom yang lain). Solusi (6) juga merupakan solusi fisibel basis, karena nilai-nilai variabelnya lebih dari atau sama dengan nol. ■
LP (1) dapat dinyatakan dalam xB dan xN
sebagai berikut: Minimumkan z=cBTxB+cNTxN Terhadap BxB+NxN =b 0 ≥ x
dengan
c
Badalah koefisien variabel basis pada fungsi objektif,c
N adalah koefisien variabel nonbasis pada fungsi objektif.Jika persamaan (3) disubstitusikan ke persamaan Z maka akan didapat :
(
)
N T N n T B B b B Nx c x c z= −1 − −1 +(
)
N T B T N T B B b c c B N x c z= −1 + − −1 Jika didefinisikan(
)
B T T T B B B c c y= −1 = − maka z dapat dinyatakan dalam y :(
T)
N T N Tb c y N x y z= + − (7)Vektor y disebut vektor simplex multiplier. Untuk suatu solusi basis xN =0 dan
b B b xB 1 ˆ= − = , maka zˆ=cB TB−1b. Notasi zˆ adalah notasi untuk z optimal.
Koefisien cˆj disebut reduced cost dari xj
dengan cˆ adalah elemen dari vektor j
(
c c B b)
cˆNT = NT − BT −1 . Reduced cost
adalah penambahan nilai fungsi objektif jika suatu variabel nonbasis dijadikan variabel basis (artinya menjadi solusi taknol) pada suatu linear programming. Maka z dapat dinyatakan sebagai N T N x c z z= ˆ+ˆ .
2.1.2 Penyelesaian Linear Programming dengan algoritma simpleks
Solusi suatu linear programming dapat diketahui optimal atau tidak untuk LP tersebut melalui algoritma sebagai berikut: • Tes Keoptimalan
Vektor y=cBTB−1 dihitung, kemudian
dapat dihitung pula nilai reduced cost
(
c y b)
c NT T
T
N = −
ˆ .
Jika cˆNT ≥0 maka solusi yang diperoleh adalah solusi optimal.
Jika cˆNT <0 , pilih variabel xt yang
memenuhi cˆt <0sebagai entering variable yaitu variabel xt yang akan masuk ke dalam
basis.
• Langkah tertentu (t)
Hitung Aˆt =B−1At, yaitu koefisien kendala yang berhubungan dengan entering
variable ke t. Tentukan indeks s pada kolom
kendala yang berhubungan dengan entering
variable yang memenuhi
⎭ ⎬ ⎫ > ⎪⎩ ⎪ ⎨ ⎧ ≤ ≤ = :ˆ 0 ˆ ˆ 1 min ˆ ˆ , , , t i t i t s s a a i b m i a b . (8) Memilih indeks dengan cara tersebut disebut dengan minimum ratio test.
Variabel yang menjadi leaving variable (variabel yang akan keluar dari basis, tergantikan oleh entering variable) dan pivot
entry adalah variabel yang berhubungan
dengan aˆs,t.
Jika aˆi,t ≤0, )(1≤i≤m , untuk semua i, maka masalah LP disebut unbounded. • Pivot
Update matriks basis B dan vektor basis xB.
Kembali ke tes keoptimalan.
Berikut contoh penggunaan algoritma simpleks :
Contoh 2
Misalkan diberikan linear programming (5) seperti pada Contoh 1, maka dengan menggunakan algoritma simpleks akan diperoleh solusi : 0 , 6 , 8 , 5 2 3 4 5 1= x = x = x =x = x dengan 34 − = z (lihat Lampiran 1).
2.2 Integer Linear Programming
Model Integer Linear Programming (ILP) atau disebut juga Integer Programming (IP), adalah suatu model linear programming dengan variabel yang digunakan berupa bilangan bulat (integer). Jika semua variabel harus berupa integer, maka masalah tersebut disebut pure integer programming. Jika hanya sebagian yang harus integer, maka disebut mixed integer programming. IP dengan semua variabelnya harus bernilai 0 atau 1 disebut 0-1 IP.
Definisi 5 (Linear Programming Relaksasi)
LP-relaksasi dari suatu IP merupakan
tersebut dengan menghilangkan kendala
integer atau kendala 0-1 pada variabelnya.
(Winston, 1995)
2.3 Graf Definisi 6 (Graf)
Suatu graf adalah pasangan terurut (V,E), dengan V himpunan takkosong dan hingga dan E adalah himpunan pasangan takterurut yang menghubungkan elemen-elemen V dan dinotasikan dengan G=
(
V,E)
.Elemen V dinamakan simpul
(vertex/node), dan elemen E dinamakan sisi (edge), dinotasikan sebagai
{ }
i,j , yaitu sisi yang menghubungkan simpul i dengan simpul j, dengan i,j∈V.(Foulds, 1992) Ilustrasi graf dapat dilihat pada Contoh 3 berikut:
Contoh 3
G :
Gambar 1. Graf G = (V, E). Pada Gambar 1, V=
{
v1,v2,v3,v4,v5}
dan{
} {
} {
} {
} {
}
{
v1,v2 , v1,v5 , v2,v3 , v2,v5 , v3,v4 E={
v3,v5} {
, v4,v5}}
. Definisi 7 (Digraf)Digraf (directed graf/graf berarah) adalah pasangan terurut (V, A) dengan V adalah himpunan takkosong dan hingga, dan
A adalah himpunan pasangan terurut dari
elemen-elemen di V.
Elemen dari A disebut sisi berarah (arc) dan dituliskan sebagai
( )
i,j dengan i,j∈V.(Foulds, 1992) Ilustrasi digraf dapat dapat dilihat pada Contoh 4 berikut :
Contoh 4
G’ :
Gambar 2. Digraf G'=(V,A).
Pada Gambar 2, digraf G’ memiliki
{
v1,v2,v3,v4,v5}
V= dan(
)
{
v1,v2 ,(
v1,v5) (
, v2,v3) (
, v2,v5) (
, v3,v4)
, A=(
v3,v5) (
, v4,v5)}
. Definisi 8 (Walk)Suatu walk pada graf G=
(
V,E)
adalah suatu barisan simpul dan sisi dari G dengan bentuk{
v v} {
v v v} {
vn vn}
vnv1, 1, 2 , 2, 2, 3,..., −1, , , atau ditulis dengan ringkas : v1,v2,...,vn atau
n
v v
v1, 2,..., . Walk tersebut menghubungkan simpul v1denganvn.
(Foulds, 1992)
Definisi 9 (Path)
Path pada suatu graf G adalah suatu walk
dengan semua simpulnya berbeda.
(Foulds, 1992) Berikut diberikan ilustrasi dari walk dan
path. Pada graf G yang terdapat pada Gambar
1 salah satu contoh walk adalah 3 4 5 2 1,v ,v ,v ,v v .
Sedangkan v1,v2,v5,v4 adalah salah satu contoh path.
Definisi 10 (Cycle)
Suatu cycle pada graf G=
(
V,E)
atau digraf G'=(V,A)adalah suatu path yang dimulai dan diakhiri oleh simpul yang sama dan terdiri atas sedikitnya tiga simpul yang berbeda pada graf G=(
V,E)
atau dua simpul yang berbeda pada digraf G'=(V,A). Cycle disebut juga path tertutup.(Foulds, 1992) v1 v5 v4 v1 v5 v4 v2 v3 v2 v3
Definisi 11 (Sisi Berarah Menjauhi atau Mendekati, Suksesor dan Predesesor)
Misalkan diberikan digraf D=
(
V,A)
. Jika a=(
vi,vj)
∈A maka sisi berarah ini dikatakan menjauhi v dan mendekati i v . jSimpul v disebut predesesor bagi simpul i
j
v , simpul vj disebut suksesor bagi simpul
i
v .
(Foulds, 1992) Definisi tersebut dapat digambarkan dalam digraf seperti berikut :
Gambar 3. Sisi berarah menjauhi atau mendekati, suksesor, dan predesesor.
Definisi 12 (Graf Berbobot)
Suatu graf G=
(
V,E)
atau digraf(
V A)
D= , dikatakan berbobot jika terdapat fungsi w :E→ℜatau ϑ:A→ℜ (dengan
ℜ
himpunan bilangan real) yang memberikan bobot pada setiap elemen E atauA.
(Foulds, 1992) Ilustrasi graf berbobot dapat dilihat pada Contoh 5 berikut:
Contoh 5
Misalkan diberikan w :A→ℜuntuk graf berbobot G= ,
(
V A∪L)
pada Gambar 4, maka w((v4,v5)) atau secara ringkas ditulis. 3 , 0 , 2 , 1 3 5 3 2 2 1 4 3 5 1 4 5 = = = = = − = v v v v v v v v v v v v w w w w w w G :
Gambar 4. Graf berbobot G= ,
(
V A∪L)
.Terdapat kasus khusus dari graf berbobot yaitu network. Beberapa konsep dalam
network :
Definisi 13 (Source)
Source adalah suatu simpul dengan tidak
ada sisi berarah yang mendekati simpul tersebut.
(Foulds, 1992)
Definisi 14 (Sink)
Sink adalah suatu simpul sehingga tidak
ada sisi berarah yang menjauhi simpul tersebut.
(Foulds, 1992)
Definisi 15 (Network)
Network adalah suatu digraf yang
mempunyai tepat satu source dan satu sink. (Foulds, 1992)
2.4 Metode Branch and Bound umtuk menyelesaikan masalah Integer
Programming
Dalam penulisan karya ilmiah ini, untuk
memperoleh solusi optimal dari masalah IP digunakan software Lingo 8.0 yaitu sebuah program yang didesain untuk membangun dan menentukan solusi model linear,
nonlinear dan optimisasi integer menjadi
lebih cepat, mudah dan lebih efisien dengan prinsip pemecahannya berdasarkan metode
branch and bound.
Prinsip dasar metode branch and bound adalah memecah daerah fisibel dari masalah LP-relaksasi dengan membuat subproblem-subproblem. Daerah fisibel linear
programming adalah daerah yang memenuhi
semua kendala linear programming. • Branch
Membuat partisi daerah solusi kedalam subproblem. Tujuannya untuk menghapus daerah solusi yang tidak fisibel. Hal ini dicapai dengan menentukan kendala yang penting untuk menghasilkan solusi IP, secara tidak langsung titik integer yang tidak fisibel terhapus. Dengan kata lain, hasil pengumpulan dari subproblem-subproblem yang lengkap menunjukkan setiap titik
integer yang fisibel dari masalah asli. Karena
sifat alami partisi itu, maka dinamakan
Branching. ● Bound
Asumsikan masalahnya merupakan tipe maksimisasi, nilai objektif yang optimal untuk setiap subproblem dibuat dengan membatasi percabangan dengan batas atas dari nilai objektif yang dihubungkan dengan sembarang nilai integer yang fisibel. Hal ini sangat penting untuk mengatur dan menempatkan solusi optimum. Operasi ini yang menjadi alasan dinamakan Bounding. (Taha, 1975) v1 v5 v4 v2 v3 2 -1 3 2 0 0 vi vj
Metode branch and bound (pencabangan dan pembatasan) dimulai dengan menyelesaikan LP-relaksasi dari integer
programmingnya. Jika sudah diperoleh
semua variabel keputusan solusi optimal
integer, maka solusi tersebut juga merupakan
solusi optimal IP. Jika tidak, maka akan dilakukan pencabangan dan penambahan batasan pada LP-relaksasinya, kemudian diselesaikan.
Contoh 6
Misalkan diberikan integer programming
berikut : Maksimumkan z=8x1+5x2 terhadap x1+ x2≤6 9x1+ x5 2≤45 x1,x2 ≥0 x1,x2integer (9)
Gambar 5. Daerah fisibel untuk LP-relaksasi dari IP(9).
Ket : ● = solusi fisibel untuk IP
■ = solusi optimal untuk LP-relaksasi Solusi optimal LP-relaksasinya adalah
75 , 3 1=
x , 25x2 =2, dengan z=41,25. Karena nilai optimal untuk IP ≤ nilai optimal untuk LP-relaksasi (masalah maksimisasi), maka nilai optimal LP-relaksasi merupakan batas atas untuk nilai optimal IP.
Gambar 6. Daerah fisibel untuk subproblem 2 dan subproblem 3 dari IP(9).
Langkah berikutnya adalah mempartisi daerah fisibel LP-relaksasi (lihat Gambar 6) menjadi dua bagian berdasarkan pada variabel yang masih dalam bentuk pecahan. Karena dua variabel diatas bukan integer, maka dipilih salah satu variabel untuk dasar pencabangan. Misalkan disini dipilih x . Jika 1 masalah LP-relaksasi diberi nama Subproblem 1, maka pencabangan tersebut menghasilkan dua subproblem, yaitu : • Subproblem 2 : Subproblem 1 ditambah
kendala x1≥4.
• Subproblem 3 : Subproblem 1 ditambah kendala x1≤3.
Dari gambar 6 terlihat bahwa setiap titik (solusi) fisibel dari IP (9) termuat dalam daerah fisibel subproblem 2 atau subproblem 3. Juga setiap subproblem ini saling lepas. Subproblem 2 dan subproblem 3 ini dikatakan dicabangkan atas x1.
Sekarang dipilih subproblem yang belum diselesaikan. Misalkan dipilih subproblem 2, kemudian diselesaikan dengan menggunakan metode simpleks, sehingga diperoleh solusi optimal untuk subproblem 2 ini adalah
4 1=
x , x2 =1,8 dengan z=41.
Karena solusi optimal subproblem 2 bukan solusi integer, maka pilih pencabangan pada subproblem 2 atas x2, sehingga diperoleh dua subproblem lagi.
• Subproblem 4 : Subproblem 2 ditambah kendala x2≥2. 9 8 7 6 5 4 3 2 1 1 0 2 3 4 5 6 1 x 2 x 9 8 7 6 5 4 3 2 1 1 0 2 3 4 5 6 1 x 2 x
• Subproblem 5 : subproblem 2 ditambah kendala 1x2≤ .
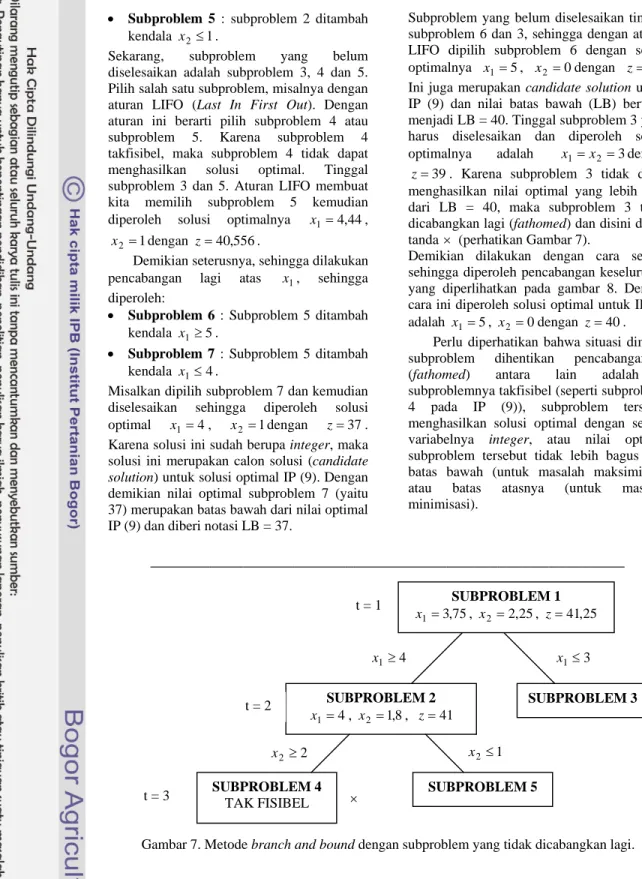
Sekarang, subproblem yang belum diselesaikan adalah subproblem 3, 4 dan 5. Pilih salah satu subproblem, misalnya dengan aturan LIFO (Last In First Out). Dengan aturan ini berarti pilih subproblem 4 atau subproblem 5. Karena subproblem 4 takfisibel, maka subproblem 4 tidak dapat menghasilkan solusi optimal. Tinggal subproblem 3 dan 5. Aturan LIFO membuat kita memilih subproblem 5 kemudian diperoleh solusi optimalnya x1=4,44,
1 2 =
x dengan z=40,556.
Demikian seterusnya, sehingga dilakukan pencabangan lagi atas x1, sehingga diperoleh:
• Subproblem 6 : Subproblem 5 ditambah kendala x1≥5.
• Subproblem 7 : Subproblem 5 ditambah kendala x1≤4.
Misalkan dipilih subproblem 7 dan kemudian diselesaikan sehingga diperoleh solusi optimal x1=4, x2=1dengan z=37. Karena solusi ini sudah berupa integer, maka solusi ini merupakan calon solusi (candidate
solution) untuk solusi optimal IP (9). Dengan demikian nilai optimal subproblem 7 (yaitu 37) merupakan batas bawah dari nilai optimal IP (9) dan diberi notasi LB = 37.
Subproblem yang belum diselesaikan tinggal subproblem 6 dan 3, sehingga dengan aturan LIFO dipilih subproblem 6 dengan solusi optimalnya x1=5, x2 =0dengan z=40. Ini juga merupakan candidate solution untuk IP (9) dan nilai batas bawah (LB) berubah menjadi LB = 40. Tinggal subproblem 3 yang harus diselesaikan dan diperoleh solusi optimalnya adalah x1= x2 =3dengan
39 =
z . Karena subproblem 3 tidak dapat menghasilkan nilai optimal yang lebih baik dari LB = 40, maka subproblem 3 tidak dicabangkan lagi (fathomed) dan disini diberi tanda × (perhatikan Gambar 7).
Demikian dilakukan dengan cara serupa sehingga diperoleh pencabangan keseluruhan yang diperlihatkan pada gambar 8. Dengan cara ini diperoleh solusi optimal untuk IP (9) adalah x1=5, x2 =0dengan z=40. Perlu diperhatikan bahwa situasi dimana subproblem dihentikan pencabangannya (fathomed) antara lain adalah : subproblemnya takfisibel (seperti subproblem 4 pada IP (9)), subproblem tersebut menghasilkan solusi optimal dengan semua variabelnya integer, atau nilai optimal subproblem tersebut tidak lebih bagus dari batas bawah (untuk masalah maksimisasi) atau batas atasnya (untuk masalah minimisasi).
________________________________________________________
Gambar 7. Metode branch and bound dengan subproblem yang tidak dicabangkan lagi.
SUBPROBLEM 1 75 , 3 1= x , x2 =2,25, z=41,25 SUBPROBLEM 3 SUBPROBLEM 2 4 1= x , x2=1,8, z=41 SUBPROBLEM 5 SUBPROBLEM 4 TAK FISIBEL t = 1 4 1≥ x x1≤3 t = 2 2 2≥ x x2≤1 t = 3 ×
Gambar 8. Pencabangan keseluruhan pada metode branch and bound. _____________________________________________________________________
III DESKRIPSI DAN FORMULASI MASALAH RUTE DAN JADWAL
PESAWAT UNTUK MEMENUHI PERMINTAAN PENUMPANG
Teknik jaringan ruang-waktu (time-spacenetwork) digunakan untuk membuat model penjadwalan dan rute penerbangan dengan tujuan memaksimumkan keuntungan perusahaan penerbangan. Model ini membangun manajemen optimal dari pesawat dan pergerakan penumpang dalam jaringan dari penerbangan langsung dan berbagai penerbangan. Teknik jaringan ini dibagi menjadi dua, yaitu jaringan aliran waktu armada dan jaringan aliran ruang-waktu penumpang. Berikut ini adalah penjelasannya.
3.1 Jaringan Aliran Ruang-Waktu
Armada
(The fleet-flowtime-space network) Jaringan aliran ruang-waktu armada digunakan untuk memformulasikan masalah berbagai rute penerbangan dan jadwal penerbangan. Tiap jaringan (network) menunjukkan satu tipe khusus pergerakan potensial dengan periode waktu dan lokasi
airport tertentu, ditunjukkan pada Gambar 9. Sumbu horizontal menunjukkan lokasi
airport; sumbu vertikal menunjukkan durasi waktu. Node dan arc adalah dua komponen
penting pada jaringan. Suatu node menunjukkan suatu airport pada waktu tertentu, sedangkan arc menunjukkan aktivitas, seperti penerbangan, landasan, atau tinggal semalaman (overnight stay). Aliran
arc menunjukkan aliran pesawat pada jaringan. Tiga jenis arc dijelaskan sebagai berikut.
3.1.1 Flight leg arc
Flight leg arc menunjukkan suatu penerbangan antara dua airport yang berbeda. Sebagai contoh yaitu pada Gambar 9, flight leg arc ditunjukkan oleh nomor 1. Salah satu contohnya adalah ada penerbangan dari airport 1 pada pukul 01:00 sampai ke
airport 2 pada pukul 02:00. Biaya
penerbangan adalah biaya arc pada jaringan.
Upperbound dari aliran arc adalah satu, artinya bahwa penerbangan dapat dilayani paling banyak sekali. Lowerbound dari aliran
arc adalah nol, menunjukkan bahwa tidak ada pesawat yang melayani penerbangan.
SUBPROBLEM 1 75 , 3 1= x , 25x2=2, , z=41,25 SUBPROBLEM 3 3 2 1= x = x ,z=39, LB = 40 SUBPROBLEM 2 4 1= x , 8x2 =1, , z=41 SUBPROBLEM 5 44 , 4 1= x , x2 =1, z=40,556 SUBPROBLEM 4 TAK FISIBEL t = 1 4 1≥ x x1≤3 t = 2 2 2≥ x x2≤1 t = 3 × SUBPROBLEM 7 4 1= x , x2 =1, z=37 candidate solution SUBPROBLEM 6 5 1= x , x2 =0, z=40 candidate solution t = 5 t = 6 × 5 1≥ x x1≤4 t = 7 ×