Seminar Nasional Sains Antariksa
Homepage: http//www.lapan.go.id
PENGEMBANGAN SISTEM PEMETAAN IONOSFER DAN PENENTUAN
INDEKS W DARI DATA GPS
(DEVELOPMENT
OF
IONOSPHERE
MAPPING
SYSTEM
AND
DETERMINATION OF W INDEX FROM GPS DATA)
Buldan Muslim dan Yoga AndrianPusat Sains Antariksa,
Lembaga Penerbangan dan Antariksa Nasional e-mail: [email protected]
ABSTRAK
Riwayat Artikel: Diterima: 22-11-2016 Direvisi: 13-03-2017 Disetujui: 23-03-2017 Diterbitkan: 22-05-2017 Kata kunci: GPS, ionosfer, gangguan, indek W.Tingkat gangguan ionosfer dapat diukur dari penyimpangan TEC ionosfer dari kondisi normal pada jam tertentu. Gangguan ionosfer dapat menurunkan kinerja aplikasi GNSS dan sistem komunikasi HF. Untuk pengguna GNSS dan komunikasi HF, sistem pemetaan ionosfer dan penentuan indek W dari data GPS telah dikembangkan. sistem tersebut memproses data GPS (file RINEX), data orbit satelit GPS (file SP3), dan bias penerima dan diferensial satelit kode (file DCB) menjadi peta ionosfer dan indeks gangguan ionosfer W. Data GPS format RINEX digunakan untuk estimasi TEC, dan bersama-sama dengan data SP3 dan data DCB, TEC ionosfer dapat dikalibrasi dan titik pengamatan ionosfer yang dilalui sinyal GPS dan vertikal TEC (VTEC) dapat ditentukan. Rata-rata bergerak 10 harian dari VTEC per jam dapat diperoleh sebagai kondisi normal nilai TEC. Tingkat gangguan ionosfer dikelompokkan menjadi empat kategori menurut indeks ionosfer W yaitu tenang, aktif, badai moderat dan badai yang intensif. Peta ionosfer dan informasi indek Wdalam bentuk file gambar disimpan di server SWIFtS secara otomatis melalui sinkronisasi. Makalah ini menjelaskan sistem pemetaan ionosfer dan indeks W ionosfer yang telah diterapkan untuk data XMIS GPS.
Keywords:
GPS, ionosphere, disturbance, W index.
ABSTRACT
The level of ionospheric disturbances can be measured from the deviation of the ionosphere TEC values at certain hour from the normal condition of the ionosphere. The ionospheric disturbance may degrade the performance of GNSS application and HF communication system. For GNSS and HF communication user, the system of ionospheric mapping and W index determination from the GPS datahas been developed. The system downloads theGPS data (RINEX files), the GPS satellite orbit data (SP3 files), and the receiver and satellite differential code bias (DCB files). The GPS RINEX data are used for the TEC estimation, and together with SP3 and DCB data, the ionosphere TEC can be calibrated as well as ionospheric pierce point and Vertical TEC (VTEC) can be calculated. The 10 days moving average of hourly VTEC can be obtained as the normal condition of TEC values. The level of ionospheric disturbances are grouped into four categories according to the ionospheric W index are quiet, active, moderate storm and intensive storm. The ionospheric map and W Index information are stored in the form of an image file and stored in the SWIFtS server automatically via synchronization. This paper describes the ionospheric map and W index determination system that has been applied for XMIS GPS data.
1. Pendahuluan
Ionosfer terbentuk oleh radiasi matahari yang mampu mengionisasi atmosfer atas menjadi ion-ion dan elektron-elektron. Kerapatan elektron yang terbentuk pada suatu waktu tergantung pada energi radiasi matahari yang mengionisasi atmosfer atas. Ionosfer tenang dikarakterisasi dengan variasi reguler ionosfer baik variasi diurnal, musiman, siklus matahari, dan spasial. Afraimovich et al. (2008) menurunkan parameter global electron content (GEC) untuk merepresentasikan variasi waktu ionosfer global berdasarkan data global ionospheric maps (GIM). GEC memberikan satu nilai TEC sebagai jumlah TEC di seluruh permukaan bumi merepresentasikan kondisi ionosfer tenang yang bervariasi terhadap waktu mulai dari orde jam (variasi diurnal), hari, bulan dan siklus matahari.
Variasi spasial ionosfer dalam daerah tertentu di permukaan bumi tergantung pada orientasi medan magnet bumi. Di daerah lintang tengah, variasi spasial ionosfer relatif lebih kecil dibandingkan dengan variasi spasial ionosfer di lintang rendah. Ionosfer ekuator dan lintang rendah dipengaruhi oleh efek kombinasi medan listrik dan medan magnet (efek E×B pada partikel permuatan). Pada siang hari plasma ionosfer terangkat ke atas karena medan listrik di ionosfer pada siang hari arahnya ke timur. Pada sore hari sampai malam hari sebelum tengah malam plasma ionosfer yang terangkat turun ke bawah dengan arah sejajar dengan garis gaya magnet bumi sehingga terjadi penumpukan elektron secara maksimum di lintang rendah ekuator baik di sebelah utara yang disebut daerah northern crest region (NCR) maupun di sebelah selatan ekuator geomagnet yang disebut dengan southern crest region (SCR). NCR dan SCR ini dikenal dengan anomali ionisasi ekuatorial (EIA, equatorial ionization anomaly). NCR dan SCR bervariasi terhadap lintang geografi, bujur geografi dan waktu lokal. Berdasarkan lintang geomagnet, lokasi NCR dan SCR umumnya berada di sekitar +/-17 derajat lintang magnetik. Untuk wilayah Indonesia SCR berada di pulau Jawa, Bali dan daerah yang selintang dengannya. Menurut Zhao et al. (2009) EIA yang mencakup SCR dan NCR ini juga bervariasi dari bulan ke bulan dan mempunyai dua puncak pada saat ekuinok yang tidak simetri di mana di bulan Oktober SCR lebih tinggi dari pada bulan Maret.
Informasi variasi ionosfer global telah tersedia dalam bentuk peta TEC yang dikenal dengan global ionospheric maps (GIM) keluaran
Center of Orbit Determination and Environment (CODE). TEC model GIM disimpan dalam bentuk ASCII dengan format IONEX (Schaer et. al., 1997). Tetapi GIM yang dihasilkan berdasarkan data GPS stasiun IGS yang mana di Indonesia baru ada stasiun BAKO yang telah resmi digunakan dalam proses pembuatan GIM. Data GPS disekitar Indonesia yang digunakan untuk pembuatan GIM terbatas beberapa setasiun seperti XMIS di Christmas Island dan DARW di Darwin serta PIMO di Pilipina. Hal tersebut bisa diketahui dari daftar setasiun GPS yang digunakan untuk proses pembuatan GIM dan telah dihitung bias receivernya dalam bentuk file DCB pada data terbaru yang bisa diunduh dari ftp://ftp.unibe.ch/aiub/CODE/. Tentunya GIM yang dihasilkan belum dapat merepresentasikan TEC di regional Indonesia. Selain variasi spasial GIM yang kurang merepresentasikan ionosfer regional Indonesia, resolusi spasial GIM juga terbatas setiap 2 jam. Oleh karena itu informasi variasi spasial dan temporal ionosfer di atas Indonesia yang dibuat dari data GPS regional dan terupdate secara rutin mendekati real time perlu dibangun untuk memenuhi kebutuhan informasi ionosfer dengan resolusi spasial dan temporal yang memadai. Oleh karena itu perlu dikembangkan suatu sistem pemetaan ionosfer regional Indonesia dari data GPS yang selalu terupdate dan tersedia secara online. Pemetaan ionosfer dari data GPS yang dibutuhkan pengguna tidak terbatas pada parameter TEC tetapi mencakup juga peta foF2 menggunakan metode konversi TEC menjadi foF2.
Ionosfer terbentuk oleh adanya radiasi matahari yang mampu mengionisasi atmosfer atas. Pada saat terjadi badai matahari, radiasi gelombang elektromagnetik dan partikel meningkat tajam sehingga kerapatan ionosfer dapat meningkat tajam atau turun tajam tergantung pada karakteristik badai matahari. Badai matahari dalam bentuk flare sinar x dapat menimbulkan peningkatan kerapatan elektron ionosfer secara mendadak hanya berselang waktu beberapa menit setelah flare sinar x terjadi. Maka dari data TEC GNSS bisa diketahui adanya flare sinar X dengan indikasi adanya peningkatan TEC secara tajam (Garcia-Rigo, 2012). Badai matahari dalam bentuk lontaran massa corona (CME) dapat menimbulkan peningkatan di suatu tempat dan penurunan kerapatan elektron di tempat dan pada waktu yang berbeda. Peningkatan dan penurunan kerapatan elektron tersebut tergantung pada orientasi medan magnet bumi, waktu lokal dan arah angin netral pada sata partikel CME masuk ke ionosfer. Peningkatan
atau penurunan kerapatan ionosfer dari kondisi normalnya merupakan gangguan ionosfer yang perlu diukur secara kuantitatif sesuai kebutuhan.
Pada GPS penentuan posisi titik, gangguan ionosfer berupa fluktuasi TEC yang cepat dapat menimbulkan loss of lock sehingga jumlah satelit GPS yang teramati bisa berkurang jumlahnya. Akibatnya terjadi peningkatan dillusion of precission (DOP) dan peningkatan User range error. Kedua parameter tersebut yaitu DOP dan URE secara langsung mempengaruhi akurasi posisi GPS. Jika gangguan ionosfer bergerak cepat secara horisontal, dapat terjadigradient ionosfer berpengaruh pada DGPS. Peningkatan dan penurunan TEC dari kondisi tenangnya dapat mempengaruhi akurasi posisi GPS yang menggunakan model ionosfer sebagai cara koreksi ionosfer seperti pada teknik PPP (Precise point position). Adapun pada komunikasi HF jika terjadi gangguan ionosfer berupa penurunan kerapatan ionosfer maka frekuensi HF tertentu menjadi terganggu bahkan komunikasi HF bisa terputus jika kerapatan ionosfer menjadi lebih
rendah dari kerapatan ionosfer yang menjadi batas terjadinya pantulan ionosfer.
Maka dengan diketahuinya tingkat gangguan ionosfer, penurunan akurasi GNSS dan kinerja komunikasi HF dapat diperkiraan. Untuk keperluan pengguna GNSS dan komunikasi HF tingkat gangguan ionosfer dikelompokkan menjadi beberapa tingkat untuk memudahkan pengguna melakukan mitigasi gangguan penentuan posisi dan komunikasi HF. Untuk keperluan pengguna GPS banyak indeks ionosfer yang dapat digunakan untuk mengukur tingkat gangguan ionosfer. Salah satu indeks ionosfer tersebut dapat diturunkan dari data GPS adalah indeks gangguan ionosfer W yang diusulkan oleh Gulyaeva (2008).
Untuk memudahkan layanan informasi ionosfer dan meningkatkan pemanfaatan informasi ionosfer, peta ionosfer dan tingkat gangguan ionosfer perlu dibuat dari data GPS yang near real time dan beroperasi secara otomatis serta tersekedul. Oleh karena itu perlu dikembangkan sistem pemetaan ionosfer dan penentuan indeks W. Tujuan pembangunan Gambar 2-1. Diagram alir proses pemetaan ionosfer dan penentuan indeks W.
sistem pemetaan ionosfer dan indeks W adalah untuk menyediakan peta ionosfer dari data GPS mendekati real time sehingga dapat digunakan untuk evaluasi dan pedoman operasional GNSS dan komunikasi HF sesuai dengan kondisi ionosfer. Makalah ini memaparkan pengembangan sistem pemetaan ionosfer dan penentuan indeks gangguan ionosfer dari data GPS secara real time dan otomatis.
2.
Data dan Metodologi
Data yang digunakan pada sistem ini adalah data GPS beresolusi tinggi 1 Hz yang terupdate setiap 15 menit. Data orbit GPS (sp3) dan data DCB untuk kalibrasi TEC GPS. Data tersebut tersedia secara online di internet dan dapat diunduh secara gratis. Data GPS 1 Hz dapat diunduh dari ftp://cddis.gsfc.nasa.gov/highrate/. Data orbit GPS SP3 dapat diunduh dari sumber yang sama tetapi pada folder yang berbeda yaitu di ftp://cddis.gsfc.nasa.gov/pub/gps/products/. Adapun data DCB tersedia di ftp://ftp.unibe.ch/aiub/CODE/.
Dari Gambar 2-1 dapat dijelaskan metodologi pemetaan ionosfer dan penentuan indeks W adalah sebagai berikut:
a. Sistem pemetaan ionosfer dan indeks ionosfer otomatis dimulai dari mengunduh data yang diperlukan yaitu data GPS format RINEX dari ftp, data orbit GPS dalam bentuk file SP3 dan data bias instrumental satelit dan receiver (file DCB).
b. Data GPS format RINEX disusun ulang menjadi data matrik di mana baris menunjukkan urutan terkait waktu pengamatan yang sesuai dengan data epok pada file epok, demikian juga data orbit GPS dari file sp3 diubah ke format matrik. Pada format matrik ini kolom menunjukkan no satelit GPS.
c. Dari data GPS dalam bentuk matrik, perhitungan TEC jadi mudah karena hanya merupakan operasi matrik sederhana seperti pengurangan antar dua matrik. Matrik yang berisi data P1 dikurangi dengan matrik berisi P2 dapat menghasilkan TEC kode menggunakan rumus (Liu, 2004)
1
3
,
40
2 1 2 1 p p KB
b
P
P
f
STEC
... (2-1)di mana bp adalah bias differensial
pengamatan jarak kode untuk satelit dan Bp
adalah bias differensial pengamatan kode untuk penerima GPS dan g = (
f
1/ f
2).d. Sedangkan pengurangan data fase L1 dan L2 menghasilkan TEC fase menggunakan rumus (Liu, 2004)
1 3 , 40 ) ( 1 1 2 2 2 2 1 1 2 1 f f f B b N N f STEC (2-2)dengan bf dan Bf adalah bias diferensial
pengamatan jarak fase untuk satelit dan penerima masing-masing.
e. Tahap berikutnya adalah menghitung nilai perbedaan antara STECk dengan STECf, nilai perbedaan tersebut dirata-ratakan untuk pengamatan selama 1 menit, menghasilkan nilai DTECkf yang smooth.
f k n
STEC
STEC
STEC
... (2-3) yang dengan substitusi persamaan (2-3) dengan persamaan (2-2) dan (2-1) akan diperoleh persamaan yang setelah disusun kembali menjadi
1 3 , 40 ) ( 1 3 , 40 2 2 1 1 2 1 2 2 1 1 2 1 2 1 f f p p n B b N N f B b P P f STEC ... (2-4) Secara teori nilai
STEC ini tetap selama periode tertentu karena antara kode dan fase melewati ionosfer yang sama lokasinya. Maka dapat diperoleh secara lebih halus (smooth) dengan perata-rataan dalam selang waktu tertentu. Nilai rata-rata perbedaan tersebut pada waktu pengamatan N dapat diperoleh secara rekursif menggunakan persamaan.f. Nilai DTECkf tersebut kemudian ditambahkan pada nilai TECf menghsilkan nilai STECSM yaituslant TEC smoothed.
N N f N SM
STEC
STEC
STEC
,
,
... (2-5)
)
1
(
3
,
40
)
1
(
3
,
40
1
)
1
(
3
,
40
2 1 1 2 2 1 1 2 1 2 1 2 2 1 1 2 1 ,
p p N n N SMB
b
f
P
P
f
N
f
STEC
... (2-6) g. Nilai STECSM ini merupakan kombinasiTEC kode dan TEC fase yang masih mengandung bias satelit dan receiver
sehingga perlu dikalibrasi. Kalibrasi dilakukan dengan mengurangi nilai STECSM dengan bias satelit dan receiver yang ada pada file DCB. Proses kalibrasi menghasilkan TEC terkalibrasi (STECSMK).
h. Konversi STECSMK ke Vertical TEC. STECSMK membutuhkan data zenith satelit GPS untuk dapat dibuah ke vertical TEC (VTEC). Konversi STECSMK menjadi VTEC dengan menggunakan persamaan
t S R t S RM
z
VTEC
STECSMK
(
)
.... (2-7) dengan 2 / 1 2 2 sin 1 ) ( z h R R z M e e ... (2-8)di mana z adalah sudut zenit satelit dilihat dari stasiun GPS.
i. Pemodelan VTEC. Setelah VTEC dipeorleh maka perlu pemodelan VTEC scara spasial menggunakan rumus sesuai dengan karakteristik dan luas daerah ionosfer yang dimodelkan. Untuk lintang rendah di Indonesia kami menggunakan fungsi polinom orde 2 untuk variasi spasial arah lintang dan polinom orde satu. Pemodelan VTEC secara spasial menghasilkan peta TEC dalam radius +/- 10 derajat dari koordinat stasiun GPS.
Setelah data STEC dikalibrasi dari bias satelit dan receiver, peta TEC di sekitar lokasi stasiun GPS dapat dibuat dengan persamaan polinom orde rendah sebagai berikut:
M m m m n N n nC
B
A
VTEC
1 1)
,
(
... (2-9) Dimana:Ф = lintang Ionospheric Pierce Point (IPP) λ = bujur IPP
N = orde fungsi polinom untuk variasi TEC terhadap lintang = 2
M = orde fungsi polinom untuk variasi TEC terhadap bujur = 1
j. Peta TEC dapat diubah ke peta foF2 dengan model ketebalan ionosfer.
Peta foF2 diperoleh darimodel ketebalan ionosfer
VTEC
foF
2
1000
(MHz) ... (2-10) di mana :
= ketebalan ionosfer (km) (Muslim, 2010; Muslim et al., 2015)k. Dari VTEC dapat diturunkan indeks W. Indek gangguan ionosfer W, dihitung dari nilai logaritma dari perbandingan TEC pada jam tertentu dengan nilai TEC pada jam yang sama tetapi yang mewakili konfisi ionosfer regulernya yaitu nilai median 27 hari terakhir dari hari tersebut. Jika TEC bernilai beberapa TECU sampai puluhan atau beberapa ratus maka nilai logaritma tersebut bernilai kurang dari 1. Rumus logaritma untuk penentuan indeks W adalah
)
(
27
log
TEC
Med
TEC
LOGTEC
.. (2-11)DTEC = log(TEC/Med27TEC). Ini hanya berada dalam rentang 1/100 sampai 1. Oleh karena itu indek tingkat gangguan ionosfer ini dirancang untuk pengguna GNSS maka rentang nilai tersebut dibagi empat kondisi ionosfer yaitu seperti dalam Tabel 2-1. Indeks W dapat dihitung dari TEC GIM Tabel 2-1.
Kondisi ionosfer dan nilai DTEC dan indeks W.
No ionosfer Kondisi DTEC W
1 Quiet DTEC < + 0.046 / DTEC> -0,046 +/- 1 2 Minor acitivity + 0,046 < DTEC < + 0,155 / -0,046 > DTEC >-0,155 +/- 2 3 Moderate activity (ionospheric storm) + 0,155 < DTEC < + 0,301 / -0,155 > DTEC >-0,301 +/- 3 4 Major activity (severe ionospheric storm) DTEC >+ 0,301 / DTEC < -0,301 +/- 4
dengan resolusi 2 jam atau dapat dihitung dari data TEC hasil perhitungan dari data GPS IGS. Untuk indeks W dari data TEC GIM bisa dihitung dari median 27 hari, tetapi untuk indeks W dari stasiun GPS dapat dibuat dari 10 hari data GPS, untuk percepatan proses perhitungan TEC dan indeks W.
3.
Hasil dan Pembahasan
3.1. Software yang dihasilkan adalah
GPSIONMAP
GPSIONMAP2106 dan GPSIONMAP6 dibuat menggunakan MATLAB dan dikompilasi dengan MATLAB compiler untuk menjadikan kedua software tersebut sebagai executable file tanpa menginstal MATLAB. Untuk instalasi GPSIONMAP hanya diperlukan mcrinstaller
versi MATLAB 2012a dengan komputer 64 bit. Setelah instalsi mcrintealler.exe, GPSIONMAP siap dieksekusi tanpa MATLAB.
3.2. Cara menjalankan GPSIONMAP
a. Run GPSIONMAP dengan klik 2 x pada fileGPSIONMAP2016.
b. GPSIONMAP dirancang beroperasi pada setiap pukul 1:20 UT, dengan set PC waktu universal terlebih dahulu. Setelah waktu PC menunjukkan pukul 1:20 maka jika koneksi internet tidak terputus, akan muncul pilihan stasiun GPS yang akan digunakan dan untuk memilih stasiun yang ada pada daftar file cukup ditulis 3 huruf pertama nama file data GPS.
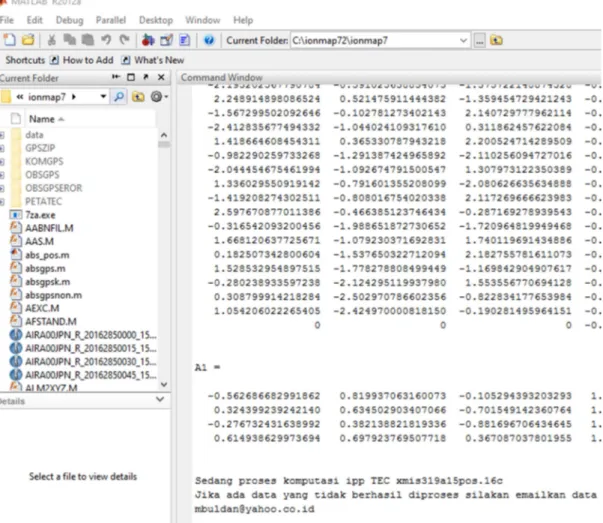
c. Setelah pilih stasiun maka software akan mengunduh otomatis data GPS dengan kode stasiun yang dipilih. Kemudian selesai mengunduh data dalam satu hari Gambar 3-1. Tampilan MATLAB pada saat mengunduh data GPS.
sebelumnya, akan dihitung TEC secara otomatis.
d. Setelah proses komputasi TEC selesai, dilanjutkan dengan perhitungan IPP.
e. Perhitungan IPP selesai dilanjutkan dengan pemodelan TEC yang menghasilkan peta ionosfer
f. Selesai pemetaan ionosfer dilanjutkan dengan proses pennentuan indeks W dari data 10 hari terakhir, maka perlu dihitung TEC secara post processing. Untuk proses TEC 10 hari telah disediakan GPSIONMAP6 yang dapat menghitung dari tanggal tertentu sampai 10 hari atau lebih dari data GPS yang lama.
Setelah proses hitung TEC 10 hari terakhir selesai dengan GPSIONMAP6, maka GPSIONMAP2016 siap dijalankan untuk menghitung TEC satu hari sebelumnya setelah pukul 1:20 UT dilalui. Selain data TEC dan peta TEC, indeks W juga dihitung dan ditampilkan setelah proses pemetaan TEC. JIka proses pemetaan TEC dan penentuan indeks W selesai,
proses selanjutnya adalah menghitung TEC setiap satu sekali jika menit ke 30 telah dilalui.
3.3. Proses jalannya GPSIONMAP
3.3.1 Proses Unduh DataProses unduh data xmis tanggal 14 Nopember 2016 (doy = 319), yang dijalankan pada tanggal 15 Nopember 2016.
Gambar 3-1 menampilkan proses unduh data GPS xmis319a00.16d.Z. Unduh data GPS ini jika berhasil, data tersebut disimpan di folder tempat program bekerja dan di subfolder GPSZIP. Data GPS di subfolder GPSZIP nantinya digunakan untuk deteksi file pada proses pengulangan atau proses post processing. Deteksi file tersebut digunakan untuk menghindari proses unduh ulang sehingga tidak membuang waktu dalam proses pemetaan ionosfer. Jika data GPS yang akan diunduh sudah adar di folder GPSZIP maka GPSIONMAP tidak melakukan proses unduh ulang. Selain data GPS, GPSIONMAP juga mengunduh data orbit sesuai data GPS yang diunduh. Maka dalam proses mengunduh data Gambar 3-2. Tampilan GPSIONMAP saat proses komputasi IPP nsedang berjalan.
orbit agar sesuai dengan data GPS, diperlukan konversi doy dan tahun yang menjadi bagian nama file GPS menjadi informasi GPS week dan day of week (DOW). Proses selanjutnya adalah unduh data DCB yang berisi bias satelit dan receiver. Data DCB ini hanya berubah sebulan sekali maka jika pada bulan yang sama, downlaod data DCB hanya dilakukan 1 kali pada awal bulan. Data GPS, data orbit format SP3 dan data DCB semua dalam file terkompresi sehingga perlu diekstraks, Untuk ekstrasi file yang terkompres telah digunakan software berbasis dos yaitu 7za.exe. Proses ekstrasi data terkompres juga dilakukan secara otomatis dan digunakan juga kondisi jika data yang akan diekstrak sudah ada maka GPSIONMAP melewati proses ekstraksi. Hal ini disebabkan jika data yang diekstrak sudah ada dan sudah diekstrak maka proses ekstraksi tidak bisa dilakukan dan terjadi kesalahan dalam bentuk proses tergantung, jalan tidak, berhenti juga tidak (hang).
3.3.2 Proses Operasi Komputasi TEC.
Proses komputasi TEC oleh GPSIONMAP dilakukan beberapa tahap. Pertama proses kombinasi data GPS dengan subprogram rin2com.m, dilanjutkan dengan proses hitung TEC dengan subprogram com2tec.m. Proses berikutnya adalah komputasi ionospheric pierce point (IPP) dengan subprogram ippcal.m Setiap tahap dalam subprogram tersebut selalu dilakukan pengecekan apakah file yang akan dihasilkan pada suatu proses sudah ada atau belum. Jika sudah ada maka GPSIONMAP tidak melakukan perhitungan ulang. Proses komputasi IPP adalah proses paling lama dari GPSIONMAP. Saat proses komputasi IPP berjalan, tampilan GPSIONMAP ditunjukkan pada Gambar 3-2.
3.3.3 Proses Pemodelan, Pemetaan dan Penentuan Indeks W
Keberhasilan proses komputasi IPP menjadi syarat proses GPSIONMAP selanjutnya yaitu pemodelan, pemetaan dan penentuan indeks W. Proses-proses tersebut relatif cepat dibandingkan dengan proses komputasi IPP. Pada tahap penyimpanan data keluaran sistem, GPSIONMAP membuat subfoder secara otomatis berdasarkan informasi yang ada pada file data GPS RINEX, yang meliputi tahun dan doy. Satu subfolder diarahkan ke folder yang sudah disinkronisasi dengan server data SWIFtS sehingga secara otomatis informasi peta ionosfer ionosfer dan indeks W dapat diakses welalui website SWIFtS.
3.3.4 Sinkronisasi Folder dengan Server SWIFtS Space Weather Information and Forecaster Services (SWIFtS) merupakan sistem aplikasi berbasis web yang berisikan prediksi dan informasi tentang cuaca antariksa baik itu aktivitas matahari, dinamika lapisan ionosfer serta aktivitas medan magnet bumi dan magnet antariksa.
Informasi dan prediksi pada SWIFtS berasal dari data hasil olahan yang diproses dari data hasil pengamatan peralatan milik LAPAN maupun milik kerjasama dan akan ditampilkan di website SWIFtS pada alamat http://swifts.sains.lapan.go.id termasuk data peta ionosfer dan indeks W. Data peta ionosfer dan indeks W yang sudah terbentuk akan tersimpan di dalam folder yang terdapat di PC server yang sudah tersinkoronisasi secara otomatis ke server data menggunakan aplikasi cloud storage yang bernama OwnCloud.Cloud Storage adalah mode layanan penyimpanan baru yang tempat penyimpanan data dan kapasitas penyimpanannya disediakan oleh penyedia layanan melalui jaringan (internet). Pengguna tidak perlu tahu secara rinci tentang infrastruktur atau mekanisme dari penyimpanan datanya (Wenying et al, 2009). OwnCloud itu sendiri adalah salah satu sistem penyimpanan data berbasis web yang menggunakan teknologi komputasi awan (cloud storage), bersifat open source dan merupakan layanan komputasi berbasis Software as a Service (SaaS) (Andrian dan Suryana, 2013). OwnCloud dapat mendukung dalam pembagian berkas dan folder secara real-time antara komputer dengan server OwnCloud (Yerusalem et al, 2015). Proses sinkronisasi folder tempat menyimpan file peta ionosfer dan indeks W dimulai saat folder pada PC server diupdate, atau ada perubahan pada folder tersebut baik itu pada penambahan folder/file terbaru atau perubahan nama folder/file.
Pada PC server aplikasi GPSIONMAP diinstal aplikasi berbasis desktop untuk melakukan sinkronisasi otomatis ke server OwnCloud. Subfolder hasil dari aplikasi yang dijalankan oleh GPSIONMAP akan ditujukan pada folder yang telah disinkronisasi pada aplikasi desktop owncloud. Owncloud menggunakan metode penyimpanan berbasis jaringan atau yang disebut dengan NAS Storage. Folder yang telah disimpan di dalam NAS Storage, akan dihubungkan juga dengan server aplikasi SWIFtS, setiap perubahan pada folder itu juga akan mempengaruhi file yang akan dimunculkan pada aplikasi SWIFtS.
Dari Gambar 3-2 dapat dilihat folder data telah disinkronisasi oleh server Owncloud. Sinkronisasi yang terjadi adalah sinkronisasi dua arah, sehingga antara folder data pada PC server aplikasi GPSIONMAP dan server Owncloud akan saling menyesuaikan baik itu struktur folder ataupun isi filenya.
3.4. Peta Ionosfer yang Dihasilkan
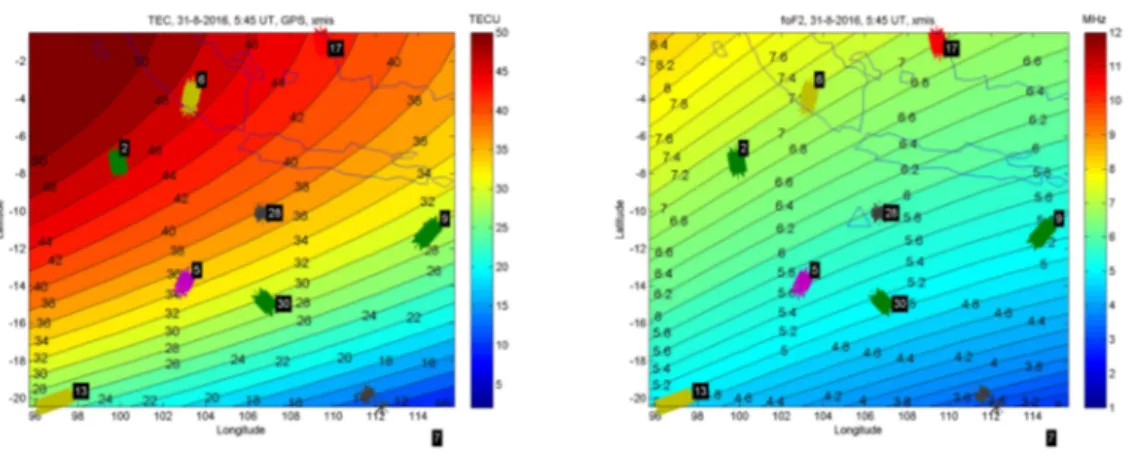
Peta ionosfer yang dihasilkan antara lain adalah peta TEC dalam radius +/- 10 derajat dari lokasi stasiun GPS yang digunakan. Saat ini data GPS beresolusi 1 Hz yang diupate setiap 15 menit yang lokasinya paling dekat dengan Indonesia adalah XMIS di Chrismast Island. Sebagaimana dapat dilihat pada Gambar 3-4, peta TEC dari data GPS XMIS mencakup seluruh wilayah pulau Jawa dan Bali, dan sebagian Sumatra dan Kalimantan. Garis-garis tebal berwarna berbeda yang tersebar dengan jumlah 9 menunjukkan titik pengamatan ionosfer dengan sinyal GPS yang memotong ionosfer pada ketinggian sekitar 350 km. Label angka pada kontur menunjukkan nilai TEC arah vertikal (VTEC). Pukul 05:45 UT di wilayah Indonesia bagian barat ekivalen dengan pukul 12:45 LT. Terlihat pada Gambar 3-4 bahwa TEC di atas sekitar wilayah Jawa cenderung meningkat nilainya mulai dari paling selatan menuju bagian utara. Itu khusus pada pukul 05:45 UT. Pada waktu yang lain variasi spasial berbeda karena ionosfer di daerah lintang rendah ini sangat dinamis. Pada panel kanan Gambar 3-3 diperlihatkan nilai foF2 di atas pulau Jawa dan sekitarnya.
3.5. Indeks W
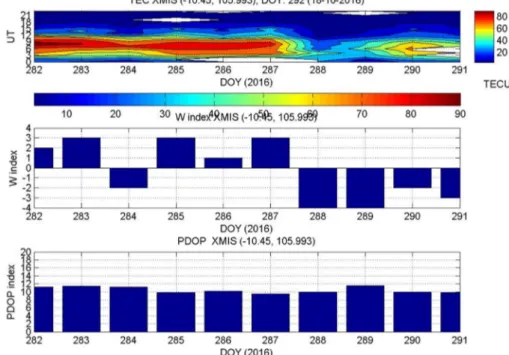
Indeks W dibuat dari data TEC. Pada kasus ini dicoba untuk menghitung indeks W dari 10 hari data TEC dari data GPS stasiun XMIS. Gambar 3-4 menampilkan indeks W selama 10
hari yang menunjukkan bahwa ada dua hari indeks W mencapai -4 yaitu pada doy 288 dan 299 atau tanggal 14 dan 15 Oktober 2016. Dari data indesk Dst diketahui dari Gambar 3-5 bahwa pada tanggal 13 Oktober telah terjadi badai geomagnet sehingga nilai Dst < 100 nT. Indeks W bernilai -4 pada saat masa recovery badai geomagnet yaitu tanggal 14 Oktober 2016. Pada 15 Oktober indeks Dst sudah kembali normal tetapi kondisi ionosfer terganggu dengan indeks W sebesar -4.
3.6. Penerapan Hasil Pada Komunikasi HF Pada operasi komunikasi HF, peta foF2 keluaran GPSIONMAP2016 yang diperbaharui setiap satu jam sekali untuk data pada satu jam sebelumnya yang berlaku untuk wilayah Jawa, Bali, Sumatra Selatan, dan Kalimantan Selatan dapat langsung digunakan untuk evaluasi frekuensi HF satu jam sebelumnya dan untuk perencanaan pemilihan frekuensi kerja HF pada 1 jam berikutnya.
Pedoman komunikasi HF secara langsung tanpa pengguna melakukan perhitungan adalah terbatas pada komunikasi HF tingkat propinsi yang menggunakan teknik NVIS. Pada teknik NVIS frekuensi HF yang paling optimal sama dengan frekuensi foF2. Sehingga pengguna HF cukup melihat peta foF2 dan memilih frekuensi HF yang paling dekat dengan foF2. Karena peta foF2 pada satu jam sebelumnya dibuat berdasarkan pengamatan sinyal GPS selama satu jam mulai pukul yang tertera pada peta (misal pukul 5:00 UT) sampai pukul 05:59 yang terbagi menjadi 4 peta untuk setiap 15 menit, maka pada pukul 06:30 GPSIONMAP menghasilkan peta foF2 yang terakhir dibuat adalah peta foF2 pada pukul 05:45 UT (dari data GPS 05:45 - 05:59) beserta peta foF2 pukul 05:00 (dari data GPS 05:00 - 05:15), peta foF2 pukul 05:15 (dari data GPS pukul 05:15 - 05:30) dan Gambar 3-3. Contoh peta TEC (panel kiri) dan foF2 (panel kanan) keluaran GPSIONMAP untuk 31 Agustus 2016 pukul 5:45 UT.
peta foF2 pukul 05:30 (dari data GPS pukul 05:30 - 05:45).
Empat peta foF2 pada jam 05:00 - 05:59 dapat digunakan untuk pedoman penggunaan frekuensi HF pada pukul 06:30 - 07:30 dengan melihat trend foF2 dari 4 peta terakhir. Jika empat peta foF2 terakhir memiliki kecenderungan naik maka pada pukul 06:30 - 07:30 hendaknya digunakan frekuensi foF2 yang lebih tinggi dari peta foF2 terakhir pada pukul 05:45. Seberapa besar peningkatan frekuensi foF2 dari peta foF2 terakhir tergantung trend kenaikannya. Jika kenaikannya dari empat peta terakhir hanya 0,5 MHz maka hanya ditingkatkan 0,5 MHz dari peta foF2 terakhir. Jika trend foF2 dari 4 peta foF2 terakhir konstan maka pada pukul 06:30 - 07:30 dapat digunakan
nilai foF2 yang sama dengan peta foF2 pada pukul 05:00 - 05:45 UT.
3.7. Penerapan Hasil Pada Navigasi Berbasis GPS
Peta TEC dapat digunakan juga oleh pengguna GPS dengan memilih waktu pada saat peta TEC memiliki nilai yang relatif lebih rendah dan dengan variasi spasial yang paling kecil Pada saat tersebut kesalahan pengukuran jarak satelit GPS dari penerima yang disebakan TEC relatif kecil karena nilainya sebanding dengan TEC. Selain itu dengan variasi spasial TEC yang kecil, menunjukkan bahwa perbedaan TEC secara spasial kecil sehingga pengaruh gradien TEC ionosfer secara spasial memberikan Gambar 3-4. Indeks W selama beberapa hari terakhir. Pada 14 dan 15 Oktober terjadi gangguan ionosfer sehingga Indeks W menjadi bernilai -4.
Gambar 3-5. Indeks Dst bulan Oktober 2016. Pada tanggal 13 Oktober telah terjadi badai geomagnet sehingga Dst turun di bawah -100 nT.
pengaruh kecil pada pengukuran GPS secara differensial (DGPS).
Pengguna GPS juga menggunakan model TEC ionosfer yang sudah ada maupun model yang dibuat dari data pengamatan GPS yang ada disekitar lokasi survei yang digunakan untuk stasiun referensi. Tetapi jika ada gangguan ionosfer koreksi kesalahan ionosfer pada pengukuran GPS menjadi tidak efektif karena model ionosfer saat terjadi gangguan memiliki kesalahan model yang relatif tinggi. Untuk mengetahui tingkat penyimpangan model ionosfer yang digunakan untuk koreksi ionosfer, dibuatlah indeks W. Indeks W membagi tingkat gangguan ionosfer menjadi 4 skala, quiet, moderate, badai, dan badai intensif. Kondisi ionosfer yang dibagi 4 tingkat mengguakan indeks W secara praktis dapat digunakan pedoman pengguna GPS ketika akan melakukan survei GPS. Jika indeks W bernilai 4 (ada badai intensif) maka kesalahan penngukuran GPS akan paling besar, dan jika indeks W bernilai 1 maka kesalahan posisi GPS dalam kondisi yang normal atau model ionosfer dapat digunakan untuk koreksi ionosfer secara efektif.
4. Kesimpulan
Sistem pemetaan ionosfer dan penentuan indeks W telah dibangun dari data GPS stasiun IGS beresolusi tinggi 1 Hz. Sistem ini terdiri dari server data TEC GPS, koneksi internet dan software GPSIONMAP. GPSIONMAP ada dua versi yaitu veris post processing (GPSIONMAP6) dan versi real time otomatis (GPSIONMAP2016). GPSIONMAP6 dapat digunakan untuk komputasi TEC dari data GPS beberapa waktu yang lalu selama beberapa hari. GPSIONMAP2016 digunakan untuk komputasi TEC secara near real time yang diupdate secara otomatis tersekedul setiap satu jam pada menit ke 30. Hasil keluaran GPSIONMAP telah diunggah ke server data SWIFTS dan dapat digunakan untuk mendukung layanan informasi cuaca antariksa. Peta TEC dan indeks W dapat dimanfaatkan untuk pedoman surveyor GPS dengan memilih waktu pada saat indeks W bernilai 1 dan variasi spasial TEC di daerah survei hampir konstan.
Adapun peta foF2 dapat secara langsung dimanfaatkan oleh pengguna radio HF untuk komunikasi HF jarak dekat dalam radius kurang dari 350 km atau tingkat satu propinsi dan antar dua propinsi terdekatnya.
Sistem pemetaan ionosfer dan penentuan indeks W otomatis dan near real time yang hasilnya dapat diakses melaui website ini
merupakan sistem yang dibangun pertama kali di LAPAN.
Rujukan
Afraimovicha, E. I., Astafyevaa, I. V. Zhivetievb, A. V. Oinatsa, and Yu, V. (2008). The method for determining GEC is first of all based on the usage of the technique for drawing global Global Electron Content during Solar Cycle 23. Geomagnetism and Aeronomy, 48, 187– 200.
Andrian, Y., Suryana, R.. (2013). Rancangan Pembangunan Sistem Penyimpanan Data Penelitian Berbasis Komputasi Awan Menggunakan OwnCloud, Prosiding Seminar Nasional Sains Antariksa dan Atmosfer (SNSAA), 377-384., ISBN : 978-979-1458-78-8. García-Rigo, A. (2012). Contributions to ionospheric determination with global positioning system: solar flare detection and prediction of global maps of total electron content, Ph.D. Theses, Technical University of Catalonia (UPC), B. 25023-2013, Barcelona, Spain.
Gulyaeva, T. L., dan Stanislawska, I. (2008). Derivation of a planetary ionospheric storm index, Ann. Geophys., 26, 2645–2648.
Liu, Z. Z. (2004). Ionospheric Tom ographic Modelingand Application Using Global Positioning System (GPS) Meaurements, Doctoral Thesis, University of Calgary, Canada.
Muslim, B. (2010). Pemodelan Model Ketebalan Ionosfer, Simposium Fisika Nasional, Surabaya 5 Oktober 2010.
Muslim, B., Haralambous, H., Oikonomou, C., Anggarani, S. (2015). Evaluation of a global model of ionospheric slab thickness for foF2 estimation during geomagnetic storm, Ann. Geophys., 58, A0551
Schaer, S., Gurtner, W., and Feltens, J. (1997). IONEX: The IONosphere Map EXchange Format Version 1 (Proposal, February 1997), Astronomical Institute, University of Berne. Wenying, Z., Yuelong, Z., Kairi, O., Wei, S.
(2009). Research on Cloud Storage Architectures and Key Technologies, ICIS '09. Proceedings of the 2nd International Conference on Interaction Sciences: Information Technology, Culture and Human, 1044-1048., ISBN: 978-1-60558-710-3.
Yerusalem, M. R., Rochim, A. F., Martono, K. T. (2015). Desain dan Implementasi Sistem Pembelajaran Jarak Jauh Di Program Studi Sistem Komputer., Jurnal Teknologi dan Sistem Komputer, 3, 4.
Zhao, B., Wan, W., Liu, L. and Ren, Z. (2009). Characteristics of the ionospheric total electron content of the equatorial ionization anomaly in the Asian-Australian region during 1996–2004, Ann. Geophys., 27, 3861– 3873.