PENJEJAKAN OBYEK DALAM KERANGKA DETERMINISTIK DAN PROBABILISTIK
B. BIDANG ILMU TEKNOLOGI C. PENDAHULUAN
Penjejakan Obyek mempunyai peranan penting dengan manfaat yang besar dalam berbagai aplikasi visual. Beberapa aplikasi penjejakan obyek ditampilkan dalam gambar 1 di bawah ini.
Menurut Alper Yilmaz, (Yilmaz dkk., 2006), tujuan dari penjejakan obyek adalah untuk menentukan bagian dari citra yang mempunyai korespondensi terbaik dengan model referensi. Dalam bentuk yang paling sederhana, penjejakan obyek bisa didefinisikan sebagai suatu permasalahan terhadap estimasi pergerakan suatu obyek dalam bidang citra. Penjejakan obyek bisa menjadi suatu algoritma yang kompleks yang diakibatkan oleh :
- noise dalam citra
- hilangnya informasi akibat proyeksi dari dunia 3D pada citra 2D - pergerakan obyek yang rumit
- halangan (sebagian atau keseluruhan) - perubahan iluminasi
- persyaratan terhadap pengolahan real-time, dll.
Beragamnya kendala tersebut memaksa para peneliti untuk memberikan batasan pada algoritma yang mereka kembangkan (Yilmaz dkk., 2006). Beragam pendekatan untuk penjejakan obyek telah diajukan. Perbedaan utama dari pendekatan-pendekatan tersebut terletak pada representasi obyek (points, silhouette, skeletal) yang sesuai, fitur citra yang sebaiknya digunakan (histogram, pinggiran, tekstur), pemodelan pergerakan dan bentuk obyek.
Pengamanan
Lalu lintas
Monitoring
Gambar 1 Beberapa aplikasi penjejakan obyek
Keberhasilan suatu tugas penjejakan
dimodelkan. Beragam deskriptor bisa digunakan untuk mewakili obyek yang hendak dijejaki. Jika obyek yang terkait te
pemantauan berlangsung tidak mengalami banyak perubahan, bisa digunakan deskriptor semacam template citra (Ali and Dailey, 20
tampilan obyek berbasis piksel, template citra bisa mengatasi beragam model pergerakan. Karena template sensitif terhadap perubahan penampilan, penjejakan mungkin gagal dalam video dimana terjadi perubahan tampilan obyek akibat halangan atau pencahayaan.
Banyak pendekatan lain terkait dengan penjejakan obyek telah diajukan. Dari sejumlah pendekatan yang telah dilakukan, metode dengan menggunakan deskriptor berbasis histogram warna telah banyak mendapat perhatian dengan hasil penjejakan yang bagus (Medeiros dkk., 2008; Laptev, 2009; Lu dkk., 2009; Ning dkk., 2009)
Olah raga Tingkah laku
Ruang pintar Robotik
Gambar 1 Beberapa aplikasi penjejakan obyek
Keberhasilan suatu tugas penjejakan banyak tergantung pada bagaimana suatu obyek dimodelkan. Beragam deskriptor bisa digunakan untuk mewakili obyek yang hendak dijejaki. Jika obyek yang terkait telah dikenal dengan baik, dan variasi tampilannya selama pemantauan berlangsung tidak mengalami banyak perubahan, bisa digunakan deskriptor (Ali and Dailey, 2009; Lu dkk., 2009). Dengan menjabarkan tampilan obyek berbasis piksel, template citra bisa mengatasi beragam model pergerakan. Karena template sensitif terhadap perubahan penampilan, penjejakan mungkin gagal dalam
ideo dimana terjadi perubahan tampilan obyek akibat halangan atau pencahayaan.
Banyak pendekatan lain terkait dengan penjejakan obyek telah diajukan. Dari sejumlah pendekatan yang telah dilakukan, metode dengan menggunakan deskriptor berbasis arna telah banyak mendapat perhatian dengan hasil penjejakan yang bagus (Medeiros dkk., 2008; Laptev, 2009; Lu dkk., 2009; Ning dkk., 2009). Algoritma penjejakan
Tingkah laku
banyak tergantung pada bagaimana suatu obyek dimodelkan. Beragam deskriptor bisa digunakan untuk mewakili obyek yang hendak dijejaki. lah dikenal dengan baik, dan variasi tampilannya selama pemantauan berlangsung tidak mengalami banyak perubahan, bisa digunakan deskriptor . Dengan menjabarkan tampilan obyek berbasis piksel, template citra bisa mengatasi beragam model pergerakan. Karena template sensitif terhadap perubahan penampilan, penjejakan mungkin gagal dalam
ideo dimana terjadi perubahan tampilan obyek akibat halangan atau pencahayaan.
Banyak pendekatan lain terkait dengan penjejakan obyek telah diajukan. Dari sejumlah pendekatan yang telah dilakukan, metode dengan menggunakan deskriptor berbasis arna telah banyak mendapat perhatian dengan hasil penjejakan yang bagus . Algoritma penjejakan
berbasis histogram warna telah diterapkan dalam 2 (dua) pendekatan yang berbeda. Pertama, teknik mean shift (Comaniciu dkk., 2003 ; Ning dkk., 2009) berusaha untuk meminimalkan jarak histogram warna yang diberi bobot dengan minimisasi berbasis gradien, yang telah menunjukkan hasil yang bagus dalam proses penjejakan. Tapi, pencariannya adalah bersifat deterministik, dan algoritma ini bisa gagal dalam kasus terjadinya halangan total, kehadiran obyek lain yang serupa, atau obyek dengan perpindahan yang besar antar frame. Metode yang kedua, menggunakan deskriptor yang sama tapi dilakukan dalam kerangka filter partikel (Nummiaro dkk., 2003 ; Medeiros dkk., 2008 ; Laptev, 2009 ; Wiharta dkk., 2010). Filter partikel melakukan penjejakan dengan cara melemparkan sejumlah partikel yang diberi bobot sesuai dengan suatu fungsi likelihood yang telah ditentukan. Posisi obyek yang dicari didapatkan dari rata-rata nilai partikel. Jadi, probabilitas kerapatan posterior dari lokasi obyek di-diskrit-kan dalam sejumlah partikel yang diberi bobot. Dalam hal ini, optimisasi mean shift diganti dengan evolusi sejumlah partikel yang bersifat probabilistik dengan rata-rata bobotnya.
D. PERUMUSAN MASALAH
Pendekatan terhadap pemodelan obyek yang digunakan seperti dijabarkan sebelumnya dilakukan dengan menggunakan histogram warna dari obyek yang dipantau. Dalam penelitian ini akan dilakukan komparasi dua kerangka kerja penjejakan obyek, yaitu dalam kerangka deterministik dengan metode mean shift dan dalam kerangka probabilistik dengan metode partikel filter. Komparasi dilakukan dengan melihat akurasi penjejakan dan kompleksitas algoritma.
E. TUJUAN PENELITIAN
Penelitian yang diajukan dimaksudkan untuk mendapatkan uji komparasi dua kerangka kerja penjejakan obyek, yaitu dalam kerangka kerja probabilistik dan deterministik.
F. TINJAUAN PUSTAKA
1. Representasi Obyek
Suatu ruang fitur dipilih pertama kali untuk memberikan karakteristik mengenai obyek target. Model target referensi disajikan dengan pdf q dalam ruang fitur. Sebagai contoh,
model referensi yang dipilih bisa berupa pdf warna dari target. Model target didefinisikan berada pada lokasi spasial 0. Dalam frame berikutnya, sebuah kandidat target didefinisikan berada pada lokasi y, dan dikarakteristikkan dengan pdf p(y) (Nummiaro dkk., 2003; Comaniciu dkk.,2003). Histogram bukan merupakan estimasi kerapatan non-parametrik terbaik, tapi mencukupi untuk menangani permasalahan yang dihadapi.
1.1. Model Target dan Kandidat Target
Untuk mengurangi beban komputasi yang diakibatkan oleh pengolahan real-time terhadap kerapatan diskrit, digunakan sejumlah m bins histogram. Dengan demikian diperoleh model target ( Comaniciu dkk.,2003): m u u q qˆ{ˆ } 1.... (17)
m u u q 1 1 ˆ (18)Target disajikan dengan suatu daerah persegi (bisa juga dengan daerah elipse) dalam ruang citra. Diberikan {x*i}i1,...nyang merupakan lokasi piksel ternormalisasi dalam daerah persegi yang didefinisikan sebagai model target. Daerah persegi ini berpusat di 0,0. Suatu kernel isotropic, dengan profil kernel k(x) yang selalu berkurang (monotonic decreasing) menangani bobot yang lebih kecil pada piksel yang lebih jauh dari pusat obyek. Profil dari kernel K didefinisikan sebagai fungsi k | 0 k < R sedemikian hingga K(x) = k(||x||2). Penggunaan pembobotan semacam ini akan meningkatkan kehandalan pada estimasi kerapatan karena piksel yang berada jauh dari pusat obyek seringkali dipengaruhi oleh penghalang atau terkena interferensi dari background.
Fungsi b : R2 {1 . . . m} memberikan asosiasi indek b x{ *i}pada piksel pada lokasi * i x dalam ruang fitur yang terkuantisasi. Probabilitas dari fitur u = 1, . . .. m dalam model target kemudian dihitung dengan ( Comaniciu dkk.,2003):
n i i i u C k x b x u q 1 * 2 *|| ) ( ) || ( ˆ (19)dimana adalah fungsi delta Kronecker. Konstanta normalisasi C diturunkan dengan memberikan persyaratan
m
u 1qˆu 1. Karena penjumlahan fungsi delta untuk u = 1, . . . m adalah 1 (satu) maka ( Comaniciu dkk.,2003) :
n i k xi C 1 2 * ) || (|| 12. Partikel Filter
2.1. Filter Bayes untuk Sistem Stokastik Dinamik
Suatu sistem stokastik nonlinear bisa didefinisikan dengan persamaan dinamis (model proses/evolusi) ruang waktu diskrit :
) , ( 1 1 k k k f x w x (1)
dan model proses pengukuran/pengamatan stokastik )
, ( k k k h x v
z (2)
dimana f(·) dan h(·) adalah fungsi vektor, xk adalah vektor state sistem, wk adalah vektor
noise dinamis, zk adalah vektor pengukuran, dan vk adalah vektor noise pengukuran. Model
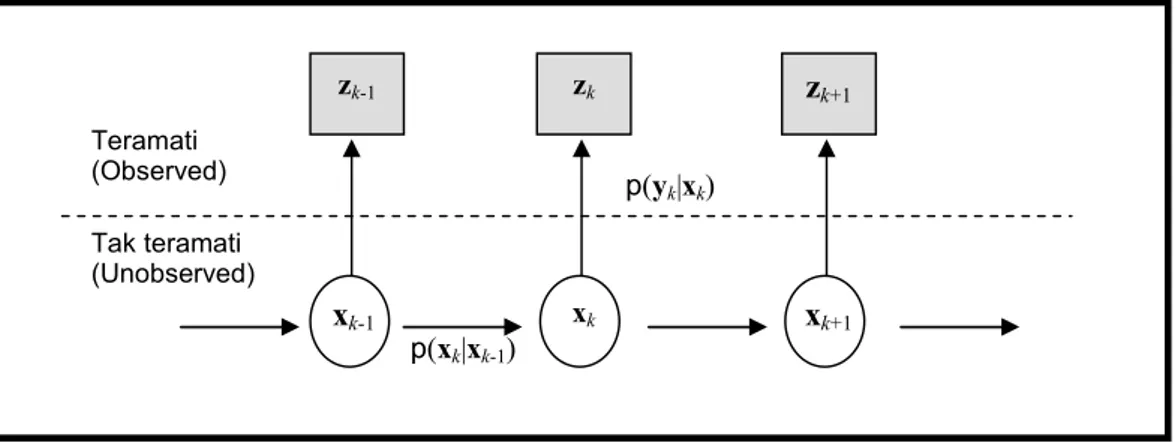
probabilistik ekuivalen dari sistem dinamik (1) dan (2) ditunjukkan dalam model grafik pada gambar 2.
Kerapatan p(zk|xk) menyatakan probabilitas pengamatan zk, ketika sistem berada dalam
state xk. Kerapatan p(zk|xk) juga merupakan likelihood sistem berada dalam state xk, dengan
diberikan pengamatan zk. Dalam teori filtering, p(zk|xk) seringkali disebut dengan nama
fungsi likelihood. Kerapatan transisi p(xk|x1:k) didefinisikan secara lengkap dengan fungsi
transisi f(xk1,wk1)dan distribusi noise proses p(wk), sedangkan fungsi likelihood p(zk|xk) dispesifikasikan dengan fungsi pengamatan h(xk,vk)dan distribusi noise pengamatan p(vk).
Dari perspektif Bayesian, permasalahan penjejakan adalah untuk menghitung derajat keyakinan (degree of belief) secara rekursif dalam state xk pada waktu ke-k, dengan diberikan
data z1:k. Dalam literatur (Candy, 2009; Arulampalan dkk. 2002), rekursi dari filter bayes dibagi menjadi dua tahap, yaitu : tahap prediksi dan update. Dalam tahap prediksi, posterior p(xk-1|z1:k-1) dari waktu sebelumnya (k-1) dipropagasi melalui model dinamis p(xk|xk-1) untuk
menghasilkan distribusi prediktif p(xk|y1:k-1) dengan menggunakan relasi
Gambar 2 . Pemodelan secara grafis dari sistem dinamik dengan state yang tak teramati (unobserved) xk dan
pengukuran zk. State hidden xk dari sistem bergerak dalam waktu sebagai proses Markov orde pertama sesuai
dengan kerapatan probabilitas conditional p(xk|xk-1). Pengamatan zk adalah conditionally independent dengan
diberikan state dan diperoleh sesuai dengan pdf p(zk|xk)
p(xk|z1:k-1) =
p(xk|xk-1, z1:k-1) p(xk-1|z1:k-1) dxk-1 (3)
Karena persamaan (1) menyatakan suatu proses Markov orde 1, maka p(xk|xk-1,z1:k-1) = p(xk|xk-1) dan persamaan (3) dapat disederhanakan menjadi
p(xk|z1:k-1) =
p(xk|xk-1) p(xk-1|z1:k-1) dxk-1 (4)
Dalam tahap update, ketika data pengamatan baru tersedia, distribusi prediktif diperbaharui dengan menggunakan likelihood p(zk|xk) dan dinormalisasi untuk menghasilkan
posterior yang baru p(xk|z1:k) dengan menggunakan aturan Bayes :
) | ( ) | ( ) | ( ) | ( 1 : 1 1 : 1 : 1 k k k k k k k k z z z x x z z x p p p p (5)
dimana konstanta normalisasi dihitung dengan integrasi penyebut pada semua nilai xk :
k k k k k k k z z x x z dx z | ) ( | ) ( | ) ( 1: 1 1: 1
p p p (6)yang tergantung dari fungsi likelihood p(zk|xk) yang didefinisikan oleh model pengukuran (2)
dan statistik dari vk yang diketahui.
Hubungan antara (4) dan (5) membentuk dasar dari solusi Bayesian yang optimal. Propagasi rekursif dari kerapatan posterior ini hanyalah solusi konseptual karena secara umum tidak bisa diselesaikan secara analitik (Arulampalam dkk., 2002). Solusi tersedia dalam kasus-kasus terbatas, antara lain filter Kalman dan filter grid-based.
Kalau deretan noise adalah Gaussian dan f dan h adalah fungsi linear, solusi optimal diberikan oleh filter Kalman (Kalman, 1960), yang menghasilkan posterior yang juga
zk-1 zk zk+1 xk-1 xk xk+1 p(xk|xk-1) p(yk|xk) Teramati (Observed) Tak teramati (Unobserved)
Gaussian. Dalam filter Kalman, rekursi persamaan (4) dan (5) bisa diintepretasikan sebagai estimasi rekursif dari mean dan kovarians dari posterior p(xk|z1:k).
Dengan berkembangnya kemampuan komputasi komputer, langkah-langkah yang signifikan telah dilakukan untuk perhitungan rekursif dari filter Bayes dengan menggunakan simulasi (Gordon dkk., 1993). Sebagai hasilnya, sejumlah metode rekursi Bayesian berbasis simulasi sekuensial Monte Carlo telah dikembangkan dalam berbagai disiplin ilmu seperti statistik, ekonomi, rekayasa teknik, dan ilmu komputer. Metode sekuensial Monte carlo ini dikenal dengan dengan nama filter partikel.
2.2. Importance Sampling
Misal p(x|z)yang merupakan distribusi dimana sampel sulit untuk diperoleh, tapi bisa dievaluasi sampai pada suatu konstanta proporsional :
) ( ) ( ~ x|z p x|z p Cp (7)
Diberikan q(x|z)suatu distribusi lain dimana sampel bisa diperoleh dengan mudah, dan mempunyai support yang sama dengan p(x|z). Dalam literatur, q(x|z) dikenal dengan nama importance function atau proposal distribution (Arulampalam dkk, 2002).
Dengan definisi di atas, integral bisa ditulis
~(x|z) x 1 ( ) (x|z) (x) x z) | (x z) | (x ) ( x z) | (x ) ( ) (f f x d f x d f x d I q w C p C 1 q q p p p (8) dimana p~(x|z) masuk ke dalam) ( ) ( ~ z | x z | x (x) q p w (9)
Konstanta proporsional Cp diperoleh dengan integrasi kedua sisi dari persamaan (12) :
p~(x|z)dx q(x|z)w(x)dx Cp (10)Dan I(f) ditulis sebagai :
( ) (x|z) (x) x x (x) z) | (x 1 ) ( f x d d f I w w q q (11)Karena q(x|z)bisa di-sampel dengan mudah, maka bisa didekati dengan estimasi Monte Carlo empirik :
N i x N i N | q 1 ) ( 1 ) (xz () x (12)dimana {x(i)}i=1...N adalah sekumpulan sampel yang independent and identically (i.i.d) dari
) (x|z
q . Integral I(f) sekarang bisa didekati dengan IˆN(f),dimana
( ) (x|z) (x) x x (x) z) | (x 1 ) ( ˆ f x d d f I w w N N q q 1 ( ) ) 1 1 1 ) ( 1 ) ( ) ( (x x ) (x i N i i N i i f N N w w
(13)Dengan menghilangkan 1/N dalam persamaan di atas dan membawa normalisasi ke dalam penjumlahan, integral bisa ditulis sebagai :
) ( x i N i i N f f I
w 1 ) ( ) ( ) ( ˆ ,
N i i i i 1 ) ) (x (x ) ( ) ( ) ( w w w (14)Dalam perfect Monte Carlo sampling, integral IˆN(f) bisa dipandang sebagai ekspektasi dari
f(x) dibawah distribusi empirik berikut :
N i x i N i N | 1 ) ( ) ( ) ( 1 ) ( ~ ) ( x x z x w p . (15)Karena IˆN(f)adalah ekuivalensi dari IN( f)pada persamaan (8), maka p~N(x|z)adalah pendekatan empirik terhadap distribusi referensi p(x|z). Oleh karena itu, importance
sampling bisa dipandang tidak hanya sebagai cara untuk melakukan pendekatan terhadap
integral (8), tapi adalah sebagai sebuah metode untuk membangkitkan distribusi empirik dari distribusi referensi (posterior) tanpa harus melakukan proses sampling terhadap distribusi referensi. Dengan demikian, distribusi referensi didekati dengan suatu ukuran acak (random
measure), dimana dispesifikasikan dengan lengkap oleh sejumlah N pasangan sampel-bobot
{x(i),w(i)}i=1...N. Bagian yang di belakang seringkali disebut dengan istilah partikel.
Perlu diperhatikan bahwa untuk filtering Bayesian secara rekursif fungsi kerapatan probabilitas dihitung secara sekuensial. Dalam bahasan berikut ini akan ditunjukkan bagaimana hal ini bisa dilakukan dengan mengaplikasikan hasil tersebut di atas dengan
importance sampling.
3. Penjejakan Obyek
3.1. Penjejakan Obyek dengan Filter Partikel
Algoritma Sequential Important Sampling (SIS) adalah suatu metode Monte Carlo (MC) yang menjadi dasar dari filter MC yang telah dikembangkan dalam dasawarsa terakhir (Doucet dkk. 2000; Doucet dkk. 2001). Pendekatan sekuensial MC ini dikenal dengan berbagai nama, antara lain filter bootstrap (Gordon dkk. 1993), algoritma kondensasi (MacCormick and Blake. 2000), filter partikel (Carpenter dkk. 1999), interacting particle approximation, dan survival of the fittest (Kanazawa dkk. 1995). Pendekatan ini merupakan suatu teknik untuk implementasi sebuah filter Bayesian rekursif dengan simulasi Monte Carlo. Ide dasar dari pendekatan ini adalah dengan menyajikan fungsi kerapatan posterior yang dibutuhkan dengan suatu kumpulan sample acak yang diberikan bobot dan menghitung estimasi berdasarkan pada sample dan bobot tersebut. Dengan meningkatkan jumlah sampel, karakteristik Monte Carlo ini menjadi representasi ekivalen dari deskripsi fungsi posterior pdf, dan filter SIS mendekati estimasi Bayesian yang optimal.
Misal {xi0:k,wki}iN1 menyatakan ukuran acak (random measure) yang memberikan karakteristik pdf posterior p(x0:k|z1:k), dimana 0: ,i 0,....,N}
i k
{x adalah sekumpulan support points atau partikel yang diberikan bobot {wki,i0,....,N}dan x0:k = {xj, j = 0, ..., k}`adalah himpunan dari semua kondisi (state) sampai pada waktu ke-k. Bobot dinormalisasi sehingga
i i k 1
w . Dengan demikian, bisa diberikan pendekatan pada kerapatan posterior pada waktu ke-k sbb:
N i i k k i k k k p 1 : 0 : 0 : 1 : 0 | ) ( ) (x z w x xDengan demikian bisa diperoleh pendekatan diskrit terhadap posterior sebenarnya, p(x0:k|z1:k). Bobot-bobot dipilih menggunakan prinsip importance sampling (Doucet dkk., 2000).
Dalam penelitian ini, akan diterapkan kerangka kerja filter partikel untuk penjejakan obyek dalam video. Tahap pertama dilakukan dalam penjejakan obyek ini adalah mendefinisikan obyek yang hendak dijejaki (inisialisasi). Inisialisasi ini dilakukan secara manual, dengan memberi bingkai persegi pada obyek yang bersangkutan pada frame pertama dari video, dengan asumsi bahwa obyek telah hadir pada frame tersebut. Metode seperti ini mempunyai kelebihan dimana pengguna mempunyai kebebasan dalam menentukan obyek yang akan dijejaki.
Bingkai persegi tersebut akan memberikan informasi prior yang menjadi pedoman bagi filter partikel dalam menentukan lokasi partikel yang akan disebarkan. Jumlah partikel yang disebarkan akan berpengaruh pada beban komputasi. Pada penelitian awal yang sudah dilakukan, partikel sejumlah 200-300 sudah mencukupi untuk bisa memberikan deskripsi mengenai obyek terkait, dengan persyaratan real-time masih terpenuhi.
Bobot dari masing-masing partikel akan tergantung dari fungsi likelihood yang diberikan. Jika fungsi likelihood f(y|x) dan prior p(x) diketahui, adalah mudah untuk menghitung distribusi posterior dari p(x|y), yang dipergunakan untuk mendapatkan inferensi, dalam hal ini posisi obyek dalam frame berikutnya. Pada kondisi awal, dimana informasi mengenai bobot partikel yang harus diberikan belum diketahui, digunakan prinsip noninformative prior. Suatu pertanyaan yang penting dan mendasar adalah bagaimana cara untuk mendapatkan
noniformative prior. Bayes/Laplace telah menyatakan bahwa jika tidak ada yang diketahui
mengenai x, maka prior p(x) dinyatakan mempunyai distribusi uniform, yaitu seluruh
outcome dari x yang mungkin mempunyai probabilitas yang sama. Ini juga dikenal dengan
nama ”principle of insufficient reason” (Datta dan Ghosh, 1996). Jadi, berdasarkan teori di atas, pembobotan awal partikel dilakukan dengan menggunakan distribusi uniform,
w = 1/N
dimana N adalah jumlah partikel yang digunakan.
Tahap berikutnya adalah propagasi partikel sesuai dengan model pergerakan yang dipergunakan. Bobot partikel diperbaharui (update) dengan menggunakan fungsi likelihood, dimana fungsi likelihood ini akan tergantung dari fitur obyek yang digunakan. Posisi obyek pada frame berikutnya bisa diperoleh dengan menggunakan nilai rata-rata bobot partikel. Kehandalan dari algoritma penjejakan obyek ini banyak tergantung dari fitur obyek yang digunakan. Dalam sub-bab berikut, akan dijabarkan mengenai fitur obyek yang menjadi dasar dari algoritma penjejakan obyek yang akan dikembangkan.
3.2. Penjejakan Obyek dengan Metode Mean Shift
Meminimalkan jarak dua buah distribusi adalah ekivalen dengan memaksimalkan koefisien Bhattacharyya. Proses iterasi dalam algoritma mean shift dilakukan dengan inisialisasi lokasi target yo dalam frame sebelumnya. Dengan menggunakan ekspansi Taylor disekitar pu(yo), pendekatan linier dari koefisien Bhattacharyya diperoleh dengan
m u n i i i h u o u h C q q 1 1 2 2 1 ˆ ) ( ˆ 2 1 ] ˆ ), ( ˆ [ h x y k w y p y p dimana
m u i o u u i b x u q 1 ] ) ( [ ) ( ˆ ˆ y p wKarena bagian pertama dari (48) adalah independent terhadap y, maka untuk meminimalkan jarak dua buah distribusi dapat dilakukan dengan memaksimalkan bagian kedua dari persamaan di atas. Dalam proses iteratif, estimasi target bergerak dari y menuju posisi baru y1, yang didefinisikan dengan :
h h n i i i n i i i i h g h g 1 2 1 2 1 x y w x y w x yJika kernel g dipilih dengan profile Epanechnikov (Comaniciu dkk, 2003), maka persamaan di atas bisa disederhanakan menjadi
h h n i i n i i i 1 1 1 w w x yAlgoritma penjejakan mean shift bisa mendapatkan bagian paling mirip dari obyek dalam frame berikutmya. Lebih mendetail mengenai algoritma mean shift bisa dilihat pada (Comaniciu dkk., 2003)
G. METODE PENELITIAN
Metode penelitian dilakukan dengan membangun system penjejakan obyek dengan menggunakan bahasa pemrograman Matlab 2009. Obyek yang dipantau (dijejaki) adalah obyek berwarna. Obyek yang hendak dipantau diinisialisasi secara manual dalam suatu bingkai persegi. Fitur yang digunakan adalah fitur histogram warna, dimana ruang warna yang dipilih adalah ruang warna RGB dan HSV.. Penjejakan dilakukan dalam kerangka filter partikel dan mean shift dalam video berwarna.
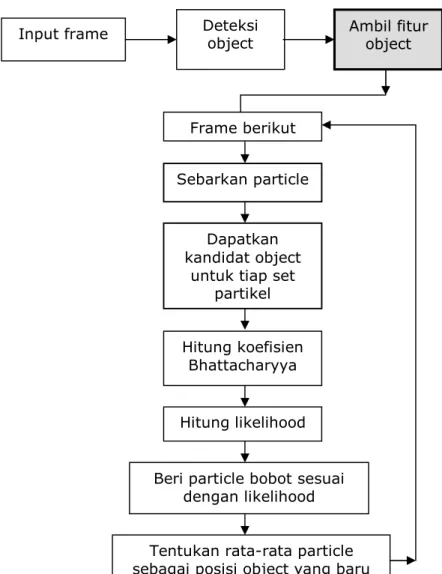
Flow chart penelitian bisa dilihat pada gambar di bawah berikut :
Gambar 3 . Flow chart penelitian penjejakan obyek dengan filter partikel Algorithma 1. Penjejakan Obyek dengan Filter Partikel
1. Tentukan obyek yang hendak dijejaki 2. Hitung distribusi target model (q) 3. Ambil frame pertama video
4. Propagasi partikel dari kumpulan Sk-1
5. Hitung kandidat pu(y) untuk tiap sampel set
6. Hitung koefisien Bhattacharyya
7. Hitung likelihood koefisien Bhattacharyya
8. Beri bobot masing-masing partikel sesuai dengan likelihood 9. Resampling
10. Hitung lokasi baru sebagai rata-rata dari partikel yang diboboti 11. Frame berikutnya (langkah 3)
Input frame Deteksi
object Ambil fitur object Frame berikut Sebarkan particle Dapatkan kandidat object
untuk tiap set partikel
Hitung koefisien Bhattacharyya
Hitung likelihood
Beri particle bobot sesuai dengan likelihood
Tentukan rata-rata particle sebagai posisi object yang baru
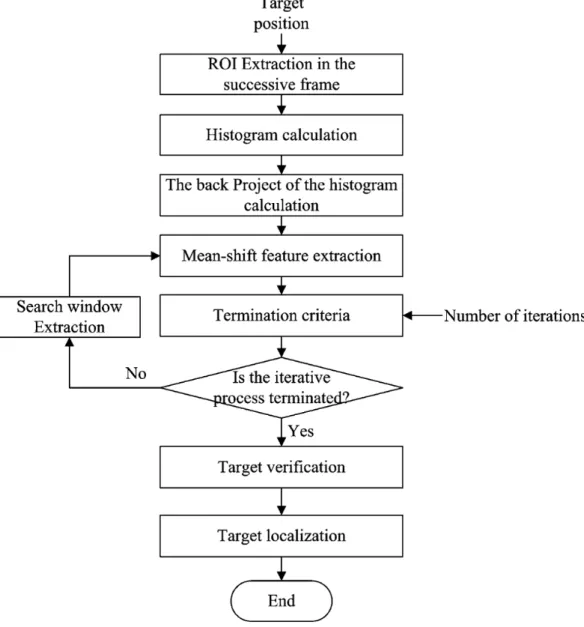
Gambar 4 . Flow chart penelitian penjejakan obyek dengan metode mean shift
H. MANFAAT PENELITIAN
Secara khusus penelitian ini ditujukan untuk mendapatkan suatu system penjejakan obyek yang handal dan mempunyai ketahanan terhadap derau. Secara umum, pemelitian yang dilakukan diharapkan mampu memberikan sumbangan pada perkembangan teknologi terutama dalam bidang komunikasi multimedia.
I. JADWAL PELAKSANAAN
Tahap Kegiatan Bulan
1 2 3 4 5 6
A Persiapan
Studi literatur mengenai filter partikel dan mean shift
B Disain dan realisasi penjejakan obyek
1 Pembuatan algoritma penjejakan obyek
2 Coding (matlab)
3 Pengujian algoritma dan analisis
C Pelaporan hasil penelitian
1 Penyusunan laporan
2 Penulisan untuk seminar/ jurnal
J. PERSONALIA PENELITIAN 1. Ketua Peneliti
a. Nama Lengkap : Dewa Made Wiharta, ST. MT. b. Pangkat/Golongan/NIP : III d
c. Jabatan Fungsional/Struktural : Lektor
d. Program Studi/Fakultas :Teknik Elektro/Fak. Teknik e. Perguruan Tinggi : Universitas Udayana
f. Bidang Keahlian : Telekomunikasi Multimedia g. Jangka Waktu Penelitian : 6 bulan
2. Anggota Peneliti 1 :
a. Nama Lengkap dan Gelar : I Made Agus Setiawan S.Kom. M.Kom b. Pangkat/Golongan/NIP : Penata Tk. I/ III.b / 198201242005021002 c. Jabatan Fungsional/Struktural : Asisten
d. Program Studi/Fakultas : Teknik Informatika / F. MIPA e. Perguruan Tinggi : Universitas Udayana
K. PERKIRAAN BIAYA PENELITIAN
Satuan Harga
Biaya (Rp) Total (Rp)
1
1 a Ketua Peneliti (1 orang) 200.000 6 ob 1.200.000
b Anggota Peneliti (1 orang) 180.000 6 ob 1.080.000
2.280.000 2 BAHAN/PERANGKAT PENUNJANG 1. 50.000 4 Rim 200.000 150.000 1 unit 150.000 85.000 1 buah 85.000 2. 500.000 1 bh 500.000 3. a. Harddisk ekxternal 750.000 1 bh 750.000 1.685.000 3 1 Perjalanan lokal 600.000 2 pkt 1.200.000 1.200.000 4 PENGOLAHAN DATA
1 Rapat Koordinasi kelompok riset
a. Konsumsi rapat 120.000 6 pkt 720.000
b. Photocopy literatur materi rapat 50.000 6 pkt 300.000
2 Publikasi Penelitian
a. Persiapan naskah publikasi 750.000 1 pkt 750.000
3
a. Cetak dan jilid laporan 500.000 1 pkt 500.000
2.270.000 7.435.000 Total (1) No De skripsi Volume GAJI/UPAH Pe rangkat pe ne litian
Bahan Habis Pakai yaitu ATK a. Kertas A4 80gr
c. Cardrige Printer d. Folder Arsip Pe ngadaan Buku
a. Pengadaan Buku Referensi
Total (1) + (2) + (3) Total (2) PERJALANAN
Pengadaan laporan penelitian Biaya cetak laporan kemajuan dan akhir penelitian
DAFTAR PUSTAKA
1. Ali, I. dan Dailey, M.N. (2009), "Multiple human tracking in high-density crowds", In Advanced Concepts in Intelligent Vision Systems (ACIVS).
2. Arulampalam, M. S., Maskell, S., Gordon, N., Clapp, T. (2002), "A Tutorial on particle filters for online nonlinear/non-Gaussian Bayesian tracking" IEEE Transactions on Signal Processing 50. 3. Candy J. V. (2009). "Bayesian Signal Processing : Classical, Modern, and Particle Filtering
Methods", JohnWiley & Sons, Inc., New Jersey.
4. Carpenter, J., Clifford, P., dan Fearnhead P. (1999), "Improved particle filter for nonlinear problems", Proc. Inst. Elect. Eng., Radar, Sonar, Navig.
5. Comaniciu, D., Ramesh, V., dan Meer, P. (2003), "Kernel-based object tracking", IEEE Transactions on Pattern Analysis and Machine Intelligence 25: 564-577.
6. Doucet, A., de Freitas, N., dan Gordon, N. (2001), "An introduction to sequential Monte Carlo methods", in Sequential Monte Carlo Methods in Practice, New York: Springer-Verlag.
7. Doucet, A., Godsill, S., dan Andrieu, C. (2000), "On Sequential Monte Carlo sampling methods for Bayesian filtering", Statistics and Computing 10(3): 197-208.
8. Gordon, N.J., Salmond, D.J., dan Smith, A.F.M. (1993), "Novel approach to nonlinear and non-Gaussian state estimation", Proc.Inst. Elect. Eng.
9. Kailath, T. (1967), "The divergence and Bhattacharyya distance measures in signal selection", IEEE Trans.Commun. Tech. 15: 52-60.
10. Lu, W., Okuma, K., dan Little, J. (2009), "Tracking and recognizing actions of multiple hockey players using the boosted particle filter", Image and Vision Computing 27: 16.
11. Medeiros, H., Park, J., dan Kak, A. (2008), "A parallel color-based particle filter for object tracking", Computer Society Conf. on Computer Vision and Pattern Recognition Workshops. 12. Ning, J., Zhang, L., Zhang, D., dan Wu, C. (2009), "Robust Object Tracking Using Joint
Color-Texture Histogram", International Journal of Pattern Recognition and Artificial Intelligence 23(7): 18.
13. Nummiaro, K., Koller-Meier, E., dan Van Gool L. (2003), "An adaptive color-based particle filter", Image Vision and Computing: 99-110.
14. Wiharta, D.M., Hendrantoro, G., dan Wirawan (2010), "NonlinearNon-Gaussian State Estimation Using Particle Filter", Proceedings The 1st International Conference on Sustainable Technology Development (ICSTD), Bali.
15. Wiharta, D.M., Wirawan, Hendrantoro G. (2011), "Tracking Fast Moving Object in Particle Filter Framework", International Conference on Communications and Networking Application (ICCNA) (accepted), Bali.
16. Yilmaz, A., Javed O., Shah M. (2006), ”Object Tracking: A Survey”, ACM Computing Surveys, Vol. 38, No. 4.
IDENTITAS PRIBADI
Nama : Dewa Made Wiharta, S.T. M.T. Tmpt/Tgl Lahir : Denpasar, 22 September 1970
NIP : 132163774 / 19700922 199702 1 001 Gol./Ruang : III/d
Pekerjaan : Staff Pengajar Jurusan Teknik Elektro Fakultas Teknik Universitas Udayana
Jabatan : Lektor
Alamat :Jalan Nangka 186 Denpasar 80231 Bali E-mail : wiharta@unud.ac.id
Mobile Phone : +62-81337196269 Home Phone : +62-361-228944 Pendidikan
Politeknik Elektronika Surabaya, Diploma III Teknik Telekomunikasi, September 1992.
Sarjana Teknik (ST) di Jurusan Teknik Elektro, Institut Teknologi Sepuluh Nopember, Tahun 1996.
Magister Teknik di Jurusan Teknik Elektro, Konsentrasi Sistem Isyarat Elektronis di Universitas Gadjah Mada, Nopember 2002.
Program S3 pasca sarjana ITS Surabaya, 2008 – sekarang. PENGALAMAN KERJA
Ketua Laboratorium Dasar Sistem Komunikasi di Jurusan Teknik Elektro, Universitas Udayana, Tahun 2003 – sekarang.
Kepala Unit Pelaksana Teknis (UPT) Pusat Komputer Universitas Udayana, Tahun 2006 – sekarang.
Koordinator Pengembangan Sistem Informasi Akademik Universitas Udayana, Tahun 2007
Koordinator Pengembangan Sistem Informasi Kepegawaian Universitas Udayana, Tahun 2007.
Tim Pengembangan situs resmi Universitas Udayana www.unud.ac.id.
Instruktur pada Workshop Disain Web menggunakan Content Management System untuk staff pengajar FKH UNUD, Tahun 2007.
Instruktur pada Pelatihan Internet, web dan e-mail di Gedung GDLN Universitas Udayana, Tahun 2007.
Anggota Team Project Penataan Menara Telekomunikasi Pemerintah Kabupaten Badung, Tahun 2004
Kajian Sistem Keamanan Wilayah Badung menggunakan CCTV, Kerjasama Pemkab Badung dengan Lembaga Penelitian Universitas Udayana, Oktober-Desember 2006. Anggota Tim Ahli dalam Kajian Tentang Pajak Hotel dan Restaurant Online
Dispenda Badung, 2007 PUBLIKASI
D.M. Wiharta, Wirawan, Gamantyo Hendrantoro, Tracking Fast Moving Object in Particle Filter Framework, IEEE – International Conference on Communications and Networking Application (ICCNA), Bali, April 2011.
D.M. Wiharta, Gamantyo Hendrantoro, Wirawan, Color-Histogram Based Particle Filter for Tracking Object in Video, The 11th Seminar on Intelligent Technology and Its Applications, Surabaya, 2010.
D.M. Wiharta, Gamantyo Hendrantoro, Wirawan, NonlinearNon-Gaussian State Estimation Using Particle Filter, Proceedings The 1st International Conference on Sustainable Technology Development (ICSTD), Bali, Oktober 2010.
I M.O. Widyantara, N.P. Sastra, D.M. Wiharta, Kalvien. R, Wirawan, Analysis GOP Size Impact and Quantization Strategies on Rate Distortion (RD) Performances of Wyner-Ziv Video Codec, The 10′th Seminar on Intelligent Technology and Its Applications (SITIA 2009), Surabaya, 14 Oktober 2009.
Kalvein Rantelobo, D.M. Wiharta, N.P. Sastra, I M.O. Widyantara, Wirawan, Performance of Combined Scalability Technique for Video Transmission Over Wireless Channel, The 10′th Seminar on Intelligent Technology and Its Applications (SITIA 2009), Surabaya, 14 Oktober 2009.
Linawati, I.M.O. Widyantara, N.P. Sastra, D.M. Wiharta, Rate Distortion Performance of Distributed Video Coding with Expectation Maximization Algorithm, 5th International Conference on Information and Communication Technology and Systems (ICTS 2009), Surabaya, 4 Agustus 2009.
Dewa Made Wiharta, Putu Ardana , Frederik Nixon Da Rosa Maia, Kunci Pintu Otomatis Menggunakan Aplikasi RFID Card , Majalah Ilmiah Teknologi Elektro, ISSN: 1693-2951, Vol. 7 No.2, December 2008
I M.O Widyantara, D. M. Wiharta, N. P. Sastra, Wirawan, An Issue in modified distributed video coding technique for transmission over wireless channel, Proceedings of the 6th Kumamoto University Forum, November 5-6, 2008.
N.P. Sastra, D.M. Wiharta, I M.O. Widyantara, Wirawan, Modeling wireless visual sensor network with a low energy consumption for desired image quality and view point, Proceedings of the 6th Kumamoto University Forum, November 5-6, 2008. Nyoman Putra Sastra, D.M. Wiharta, Unjuk kerja Kombinasi Error Control Coding
Dengan Teknik Pengkodean Hamming Dan Konvolusi Pada Kanal AWGN Dan Kanal Rayleig, Majalah Ilmiah Teknologi Elektro, ISSN: 1693-2951, Vol. 6 No.3, Juli-Desember 2007
Linawati and DM. Wiharta, E-learning: Multimedia Application on Digital Signal Processing, International Symposium on Open, Distance, and E-Learning, Discovery Kartika Plaza Hotel, Badung, Bali, 13 – 15 November 2007.
A.A. K. Oka Sudana , D.M. Wiharta, Mahardhika Tirta, Sistem Verifikasi Sidik Jari Dengan Metode Pencocokan Berbasis Bank Gabor Filter, Majalah Ilmiah Teknologi Elektro, ISSN: 1693-2951, Vol. 5 No.2, July 2006
Nyoman Putra Sastra, Dewa Made Wiharta, Agus Supranartha , Perancangan Dan Pembuatan Sistem Kontrol Dengan Memanfaatkan Layanan Sms Telepon Selular Berbasis Mikrokontroler At89c51, Majalah Ilmiah Teknologi Elektro, Vol. 4 No.2, July 2005
Dewa Made Wiharta, Metode Eigenface Untuk Pengenalan Citra Wajah, Majalah Ilmiah Teknologi Elektro, ISSN: 1693-2951, Vol. 2 No.2, July 2003
Denpasar, 12 Agustus 2013
BIODATA PENELITI I A. Identitas Diri
1 Nama Lengkap (dengan gelar) I Made Agus Setiawan, S.Kom, M.Kom
2 Jenis Kelamin L
3 Jabatan Fungsional Lektor
4 NIP/NIK/Identitas lainnya 198201242005021002
5 NIDN 0024018201
6 Tempat dan Tanggal Lahir Denpasar, 24 Januari 1982
7 E-mail madeagus@cs.unud.ac.id
madeagus@gmail.com
8 Nomor Telepon/Hp 081287068525
9 Alamat Kantor Jurusan Ilmu Komputer, FMIPA, Universitas Udayana, kampus Bukit Jimbaran, Bali 10 Nomor Telepon/Faks (0361)701954 / (0361)701907
11 Lulusan yang Telah Dihasilkan S-1 = … orang, S-2 = … orang, S-3 = … orang 12 Mata Kuliah yang Diampu
1. Pemrograman Web 2. Data Warehouse 3. Basis Data
4. Pemrograman Berorientasi Obyek B. Riwayat Pendidikan
Program S-1 S-2 S-3
Nama PT Institut Teknologi Sepuluh Nopember Surabaya
Universitas Indonesia Bidang Ilmu Teknik Informatika Magister Ilmu
Komputer Tahun Masuk 2000 2009 Tahun Lulus 2004 2011 Judul Skripsi/ Tesis/Disertasi Perancangan dan Pembuatan Perangkat Lunak Penghalusan Permukaan Objek Tiga Dimensi Dengan Metode Subdivision Sistem Pengenalan Kelainan Aritmia Menggunakan Metode FN-GLVQ Nama Pembimbing/ Promotor Rully Soelaiman, S.Kom, M.Kom
Dr. Eng. Ir. Wisnu Jatmiko, M.Kom C. Pengalaman Penelitian dalam 5 Tahun Terakhir
No Tahun Judul Penelitian Pendanaan
Sumber Jml (Juta Rp)
1 2011 Sistem Pengenalan
Kelainan Aritmia Menggunakan Metode
GLVQ
D. Pengalaman Pengabdian Kepada Masyarakat dalam 5 Tahun Terakhir
No Tahun Judul Penelitian Pendanaan
Sumber Jumlah (Juta Rp)
1 2 3
E. Pengalaman Penulisan Artikel Ilmiah Dalam Jurnal dalam 5 Tahun Terakhir No Tahun Judul Artikel Ilmiah Volume/No
mor
Nama Jurnal 1 Heart beat classification using
wavelet feature based on neural network
10 Word Scientific and Engineering Academic and Society (WSEAS) TRANSACTIONS on SISTEMS 2011 3 Arrhytmia Classification Using
Fuzzy-Neuro Generalized Learning Vector Quantization
International Conference on Advance Computer Science and Information Sistem. ICACSIS 2011
4 Arrhytmia Heart Beat
Classification Using Mahalanobis Generalized Learning Vector Quantization (Mahalanobis-GLVQ) International Symposium on Micro-Nano Mechatronics and Human Science(MHS) 2011 Building Automation Tools to
Calculate Trichloroethylene Level in Human Liver Using U Case Study: Images of White Mouse Liver IEEE International Symposium on Micro-NanoMechatronics and Human Science(MHS) 2011 Fuzzy Learning Vector
Quantization Particle Swarm Optimation (FLVQ-PSO) and Fuzzy Neuro Generalized Learning Vector Quantization (FN-GLVQ) for Automatic Early Detection Sistem of Heart Diseases based on Real-time Electrocardiogram International Conference on Instrumentation, Control, Information Technology and Sistem Integration. SICE 2012 A Case Study of It Implementation in Public University : It’s Barriers and Challenges
5/2 Jurnal Ilmu Komputer FMIPA Universitas Udayana
F. Pengalaman Penyampaian Ilmiah dalam 5 Tahun Terakhir
No . Nama Pertemuan Ilmiah/Seminar 1. 2. 3.
G. Pengalaman Penulisan Buku dalam 5 Tahun Terakhir No
.
Judul Buku
1. 2.
H. Pengalaman Perolehan HKI dalam 5 No
.
Judul/Thema HKI
1. 2.
I. Pengalaman Merumuskan Kebijakan Publik/Rekayasa Sosial Lainnya dalam 5 Tahun Terakhir
No .
Judul/Tema/Jenis Rekayasa Sosial Lainnya
yang Telah Diterapkan
1. 2.
Pengalaman Penyampaian Makalah secara Oral pada Pertemuan/Seminar Ilmiah dalam 5 Tahun Terakhir
Judul Artikel Ilmiah Waktu dan Tempat
Pengalaman Penulisan Buku dalam 5 Tahun Terakhir
Tahun Jumlah
Halaman
Penerbit
Pengalaman Perolehan HKI dalam 5-10 Tahun Terakhir
Tahun Jenis No. P/ID
Pengalaman Merumuskan Kebijakan Publik/Rekayasa Sosial Lainnya dalam 5
Sosial Lainnya yang Telah Diterapkan
Tahun Tempat
Penerapan
Respon Masyarakat
Bukit Jimbaran, 12 Agustus 2013
I Made Agus Setiawan, S.Kom, M.Kom NIP. 198201242005021002
Makalah secara Oral pada Pertemuan/Seminar Waktu dan
Tempat
Penerbit
No. P/ID
Pengalaman Merumuskan Kebijakan Publik/Rekayasa Sosial Lainnya dalam 5 Respon
Masyarakat
2013
BIODATA PENELITI PEMBIMBING I. IDENTITAS PRIBADI
1.1 Nama Lengkap Dr. I Made Oka Widyantara, ST, MT 1.2 Tempat dan Tanggal
lahir
Bakas, 11 Desember 1973
1.3 Alamat Rumah Jalan Sedap Malam Gang Alamanda No.7 Kesiman Denpasar Bali
1.4 Nomor Telepon/Fax -
1.5 Nomor HP 081338499965
1.6 Alamat Kantor Jurusan Teknik Elektro, Universitas Udayana, Kampus Bukit Jimbaran, Denpasar Bali 1.7 Nomor Telepon/Fax 0361-703315
1.8 Alamat E-mail oka.widyantara@unud.ac.id, oka@elect-eng.its.ac.id
II. RIWAYAT PENDIDIKAN
2.1 Program S-1 S-2 S3
2.2 Nama PT Institut Teknologi Sepuluh Nopember
(ITS), Surabaya
Institut Teknologi Bandung (ITB), Bandung
Institut Teknologi
Sepuluh Nopember (ITS), Surabaya 2.3 Bidang Ilmu Jurusan Teknik
Elektro, Bidang Studi: Teknik Telekomunikasi Sistem Informasi Telekomunikasi (SIT) Multimedia Komunikasi 2.4 Tahun Masuk 1992 1999 2008 2.5 Tahun Lulus 1997 2001 2013 2.6 Judul Skripsi/Tesis Studi tentang layanan SMS pada jaringan GSM
Studi dan realisasi dekoder video H.261 2.7 Nama
Pembimbing/ Promotor
Ir. Hang Suharto, M.Sc
Dr. Ir. Suhartono Tjondronegoro Dr. Ir. Hendrawan
III. PENGALAMAN PENELITIAN
No Tahun Judul Penelitian
1 2004 Meningkatkan Pemahaman Materi Kuliah Teori Medan Elektromagnetik 2 Dengan Menerapkan Metode Pengajaran Interaktif Berbasis Internet (Teaching Grant, TPSDP Unud). (Ketua peneliti) 2 2005 Perencanaan Jaringan Komunikasi Radio Klungkung - Nusa Penida
Menggunakan Teknologi DS-CDMA (Research Grant, TPSDP Unud).(Ketua peneliti)
3 2005 Perencanaan menara telekomunikasi terpadu di Pemerintah Kabupaten Badung. (Kerjasama Teknik Elektro Unud dengan Kantor Informasi dan Telekomunikasi Pemkab Badung). (Anggota peneliti)
4 2006 Perencanaan Sistem Keamanan Terpadu di Kabupaten Badung. (Kerjasama Lemlit Unud dengan Kantor Informasi dan Telekomunikasi Pemkab Badung) (Anggota peneliti)
5 2009 Hibah Strategis Nasional, dengan judul “Pengkodean Video Terdistribusi Untuk Jaringan Sensor Monitoring Lingkungan Menggunakan Algoritma Expectation Maximization”. (Anggota peneliti)
DIKTI, melalui DIPA Universitas Udayana Nomor: 0229.0/023-04.2/XX/2009
6 2011 Hibah Kegiatan Penelitian Disertasi Doktor 2011, dengan judul : “Pengkodean Video Wyner-Ziv berbasis Pembelajaran gerak iteratif dengan perbaikan estimasi bidang gerak dan model derau korelasi “ DIKTI, melalui DIPA ITS Tahun Anggaran 2011 Nomor 599/IT2.6/KU/2011
IV. PENGALAMAN PENULISAN ARTIKEL ILMIAH DALAM JURNAL
No Tahun Judul Artikel Ilmiah Nama Jurnal
1 2003 Teknik Pengkodean Video H.261 Teknologi Elektro ISSN: 1693-2951, Vol.2 No.2 Juli 2003 2 2004 Disain dan Simulasi Video Dekoder
H.261
Teknologi Elektro ISSN: 1693-2951, Vol. 3, No.1 Januari 2004 3 2005 Analisa Pengaruh Bit Error pada
Transmisi Data Video
Teknologi Elektro ISSN: 1693-2951, Vol. 4, No.2 Juli 2005 4 2007 Pengaturan parameter pengkodean
untuk rate kontrol pada pengkodean video H.261
Teknologi Elektro ISSN: 1693-2951, Vol. 6, No.2 Juli 2007 5 2007 Video streaming MPEG-4 pada
jaringan wireless IP 802.11 b
Teknologi Elektro ISSN: 1693-2951, Vol. 6, No.3 Desember
2007 6 2008 Analisa Optimalisasi Teknik
Estimasi & Kompensasi Gerak pada Enkoder Video H.263
Teknologi Elektro ISSN: 1693-2951, Vol. 7, No.2 Juli 2008
7 2011 Efficient Motion Field Interpolation Method for Wyner-Ziv Video Coding
TELKOMNIKA, Indonesian Journal of Electrical
Engineering. ISSN: 1693-6930 Terakditasi oleh DIKTI, No.
51/Dikti/Kep/2010
V. PENGALAMAN PENULISAN ARTIKEL ILMIAH DALAM
SEMINAR/PROSIDING
No Tahun Judul Artikel Ilmiah Nama Seminar
1 2006 Meningkatkan pemahaman materi kuliah teori medan elektromagnetik 2 dengan menerapkan metode pengajaran interaktif berbasis internet
Prosiding research and studies II, 2006, ISBN 979-99182-4-3
2 2008 An Issue in modified distributed video coding technique for transmission over wireless channel
Proceedings of the 6th Kumamoto University Forum,
November 5-6, 2008 3 2008 Modeling wireless visual sensor
network with a low energy consumption for desired image quality and view point
Proceedings of the 6th Kumamoto University Forum,
November 5-6, 2008 4 2009 Rate-Distortion performance of
distributed video coding with expectation maximization algorithm.
The 5th International Conference on Information &
Communication Technology and Systems (ICTS), 4
Augustus 2009 5 2009 Analysis GOP Size Impact and
Quantization Strategies on Rate Distortion (RD) Performances of Wyner-Ziv Video Codec
The 10thSeminar on Intelligent Technology and Its Application
(SITIA), 14 Oktober 2009
6 2010 Interpolation Technique to Improve Unsupervised Motion Vector Learning of Wyner-Ziv Video Coding
The 2rd International Conference on Soft Computing, Intelligent System
and Information (ICSIIT), 1-2 Juli 2010.
7 2011 Wyner-Ziv Video Coding with Improved Motion Field Using Bicubic Interpolation
The 2nd International Conference on Instrumentation, Communications, Information
Technology, and Biomedical Engineering (ICICI-BME)
2011ITB, Bandung, 8-9 Nopember 2011
VI. KEGIATAN PENUNJANG PENELITIAN
No Kegiatan Penyelenggara Status
1. Pelatihan Penulisan Artikel Ilmiah Internasional tahun 2011
Direktorat Penelitian dan Pengabdian kepada Masyarakat
(DP2M) Ditjen DIKTI 11-14 Agustus 2011
Peserta
Denpasar, 12 Agustus 2013