BAB I
PENDAHULUAN
I.1. Latar belakang
Pulau Sumatera merupakan salah satu pulau yang mempunyai aktifitas geodinamika yang cukup tinggi di Indonesia. Aktifitas geodinamika yang tinggi di Indonesia disebabkan oleh pertemuan tiga lempeng benua, yaitu lempeng Eurasia, Indo-Australia, dan Pasifik. Lempeng Indo-Asutralia menunjam ke bawah lempeng Eurasia dengan kecepatan sekitar 5 sampai dengan 6 cm/tahun (Prawirodirjo, dkk., 2000).
Bedasarkan data kegempaan Badan Meteorologi, Kilimatologi, dan Geofisika (BMKG), wilayah Sumatera senantiasa mengalami gempa pada setiap tahun dengan kekuatan lebih dari 5 SR. Data kegempaan dari BMKG dapat dilihat dan diunduh pada situs http://repogempa.bmkg.go.id. Cuplikan data kegempaan wilayah Sumatera bagian utara dari BMKG disajikan pada Gambar I.1 berikut.
Teknologi Global Navigation Satellite System (GNSS) saat ini sudah diterapkan untuk studi geodinamika di wilayah Sumatera. Penerapan teknologi GNSS membantu dalam penentuan posisi dan kecepatan pergerakan di permukaan Gambar I.1. Cuplikan data kegempaan wilayah Sumatera bagian utara tahun 2011
bumi dengan hasil yang cepat dan akurat. Pada prinsipnya untuk menentukan posisi suatu titik minimal diperlukan pengamatan 4 buah satelit pada saat yang bersamaan. Teknologi GNSS yang paling diketahui saat ini adalah Global Positioning System (GPS) yang dikembangkan oleh Amerika Serikat. Sistem navigasi lain yang kini juga dikembangkan adalah GLONASS milik Rusia, Galileo milik Eropa, serta Compass yang dikembangkan oleh China (Schwieger, dkk., 2009).
Studi geodinamika di Sumatera saat ini semakin berkembang dengan adanya stasiun GNSS Continuously Operating Reference System (CORS) dari Sumatran
GPS Array (SuGAr) dan stasiun CORS Badan Informasi Geospasial (BIG).
Tersedianya jaringan CORS di Sumatera, membuat studi geodinamika akan semakin berkelanjutan dan dapat diperoleh akurasi yang tinggi.
Dalam penelitian ini, dilakukan perhitungan kecepatan pergeseran horisontal di wilayah Sumatera bagian utara menggunakan data pengamatan GNSS CORS dari stasiun CORS Sumatran GPS Array (SuGAr) dan stasiun CORS Badan Informasi Geospasial (BIG). Perhitungan kecepatan pergeseran stasiun GNSS CORS SuGAr dan BIG akan dilakukam menggunakan perangkat lunak ilmiah GNSS Analysis of
Massachusset Institute of Technology (GAMIT)dan Global Kalman Filter VLBI and
GNSS Analysis Program (GLOBK). Perangkat ilmiah ini digunakan karena dalam
pengolahan data GNSS mengkombinasikan data lain seperti parameter atmosfer, orientasi bumi (EOP), pasang surut dan cuaca yang menjadikan hasil dari pengolahan data GNSS sangat teliti (Herring, dkk., 2010).
I.2. Identifikasi Masalah
Pulau Sumatera khususnya bagian utara merupakan wilayah yang berpotensi mengalami gempa besar di setiap waktu. Sampai saat ini di wilayah Sumatera tersedia jaringan GNSS CORS dari berbagai instansi yang dapat digunakan untuk studi geodinamika. Oleh sebab itu, perlu dilakukan kajian atau penelitian mengenai geodinamika di wilayah Sumatera bagian utara menggunakan data jaringan GNSS CORS yang tersedia secara berkelanjutan.
I.3. Pertanyaan Penelitian
Berdasarkan indentifikasi masalah tersebut, maka pertanyaan dalam penelitian ini adalah sebagai berikut:
1. Berapa nilai dan ketelitian koordinat 5 stasiun GNSS CORS SuGAr dan 4 stasiun GNSS CORS BIG pada tahun 2011, 2012, dan 2013 ?
2. Berapa besar dan arah pergeseran horisontal 5 stasiun GNSS CORS SuGAr dan 4 stasiun GNSS CORS BIG dalam rentang waktu 2011 sampai dengan 2012, 2011 sampai dengan 2013, dan 2012 sampai dengan 2013 ?
I.4. Cakupan Penelitian Cakupan dalam penelitian ini adalah:
1. Data yang digunakan dalam penelitian ini adalah data pengamatan GNSS CORS selama 7 hari pengamatan pada tahun 2011, 2012, dan 2013 di 5 stasiun GNSS CORS SuGAr (BNON, BSIM, LEWK, PBLI, UMLH) dan 4 stasiun GNSS CORS BIG (MEUL, CSAB, LHMI, SAMP) di wilayah Sumatra bagian utara. 2. Pengolahan data dilakukan dengan menggunakan 12 titik ikat global dalam ITRF
2008 yaitu ALIC, BAKO, COCO, CUSV, DARW, DGAR, DGAV, GUAM, KARR, KAT1, LHAZ, dan PIMO.
3. Pengolahan data menggunkan perangkat lunak GAMIT/GLOBK 10.5.
I.5. Tujuan Tujuan dari penelitian ini adalah:
1. Mendapatkannilai dan ketelitian koordinat pada tahun 2011, 2012, dan 2013 di 5 stasiun GNSS CORS SuGAr (BNON, BSIM, LEWK, PBLI, UMLH) dan 4 stasiun GNSS CORS BIG (MEUL, CSAB, LHMI, SAMP) di wilayah Sumatra bagian utara.
2. Mendapatkan nilai kecepatan pergeseran horisontal 5 stasiun GNSS CORS SuGAr (BNON, BSIM, LEWK, PBLI, UMLH) dan 4 stasiun GNSS CORS BIG
(MEUL, CSAB, LHMI, SAMP) di wilayah Sumatra bagian utara dalam rentang waktu 2011 sampai dengan 2012, 2011 sampai dengan 2013, dan 2012 sampai dengan 2013.
I.6. Manfaat
Manfaat dari penelitian ini dapat diperoleh nilai dan ketelitian koordinat dari lima stasiun GNSS-CORS SuGAr dan empat stasiun GNSS-CORS BIG di Sumatera bagian utara pada tahun 2011, 2012, dan 2013, serta dapat diketahui besar kecepatan, arah pergerakan dan pola pergerakan dari sembilan stasiun tersebut.
I.7. Tinjauan Pustaka
Penelitian telah dilakukan oleh Prawirodirdjo, dkk., (2008) dengan tujuan untuk menganalisa segmentasi patahan pada siklus gempa bumi megathrust Sumatera, yang terjadi pada 26 Desember 2004 Mw 9.1 Sumatra‐Andaman, 28 Maret 2005 Mw 8.7 Nias‐Simeulue, dan 12 September 2007 Mw 8.4 gempa Mentawai. Penelitian Prawirodirjo, dkk., (2008) menggunakan data pengamatan GPS tahun 1989 s.d 2001 BAKOSURTANAL yang sekarang menjadi BIG dan Sumatran
GPS Array (SuGAr) tahun 2002 s.d 2007. Penelitian Prawirodirjo, dkk., (2008)
dilakukan dengan menghitung vektor kecepatan pergeseran dan kemudian menganalisis karakteristik patahan yang terjadi. Hasil analisis menunjukkan bahwa
megathrust Sumatra mengalami segmentasi yang mungkin akan terus bertahan
selama beberapa siklus gempa. Berdasarkan perbandingan medan kecepatan sebelum dan sesudah tahun 2001, zona subduksi di bawah Kepulauan Batu dan Enggano yang sebelumnya terkunci, setelah tahun 2001 mengalami pergeseran bebas, sehingga patahan subduksi akan bervariasi di setiap waktu.
Penelitian mengenai deformasi di Pulau Sumatera dilakukan oleh Rusmen (2013). Penelitian Rusmen (2013) bertujuan untuk meneliti besarnya dampak gempa Mentawai tahun 2010 dengan menghitung vektor pergeseran 31 stasiun SuGAr sebelum dan sesudah gempa dengan menggunakan perangkat lunak GAMIT/GLOBK 10.4 dan menghitung besarnya regangan dengan perangkat lunak
pergeseran horizontal dan vertikal. Pergeseran yang cukup besar teramati 10 s.d 30 cm untuk horizontal dan 1 s.d 6 cmuntuk vertikal yang berada di sekitar pusat gempa, Gempa Mentawai masih memiliki pengaruh post-seismic dilihat dari data vektor pergeseran setelah terjadi Gempa Mentawai, yaitu terdapat beberapa stasiun pengamatan yang berlawanan arah dengan vektor interseismic. Hasil distribusi regangan berupa ekstensi mengindikasikan adanya post-seismic. Gempa Mentawai mengakibatkan terjadinya pelepasan energy sekitar 74% pada tahap co-seismic. Nilai ini diperoleh dari perbandingan pergeseran yang terjadi akibat gempa dengan akumulasi pergeseran sampai tahun 2011.
Penelitian geodinamika di Pulau Sumatera dilakukan oleh Permana, dkk., (2012). Penelitian Permana, dkk., (2012) bertujuan untuk mengetahui dampak gempa Padang 2009 terhadap 28 stasiun SuGAr dan mengitung besar regangan yang ditimbulkan. Hasil penelitian tersebut menunjukkan bahwa vektor pergeseran titik-titik pengamatan GPS di Sumatera cenderung bergerak ke arah timurlaut yang mengindikasikan adanya akumulasi energi, sedangkan vektor pergeseran yang mengarah ke baratdaya mengindikasikan adanya pelepasan energi. Kecepatan vektor pergeseran rata-rata dari titik-titik pengamatan GPS sebelum gempa adalah sebesar 0,033 m/tahun dan setelah gempa sebesar 0,031 m/tahun dengan pergerakan mengarah ke timurlaut. Regangan di sekitar daerah kajian menunjukkan adanya pola kompresi dengan nilai maksimum sebesar 1,226 x 10-7 strain yang mengindikasikan potensi terjadinya gempa bumi.
Penelitian geodinamika di Pulau Sumatera juga telah dilakukan oleh Sugiyanto, dkk., (2011) yang bertujuan untuk melakukan pemutakhiran data perubahan koordinat pada jaring pengamatan GPS yang digunakan sebagai analisa deformasi permukaan daratan Aceh, mempelajari karakteristik patahan aktif segmen Aceh dan segmen Seulimum dengan melakukan pengukuran lanjutan pada jaringan pengamatan GPS pada segmen utara dari sistem patahan Sumatera, menghitung besar pergeseran post-seismic yang terjadi setelah gempa Aceh. Perangkat lunak yang digunakan adalah Bernesse 5.0. Hasil dari penelitian ini diketahui bahwa daratan Aceh masih dipengaruhi oleh aktivitas post-seismic, dengan rata-rata besaran pergeserannya adalah 10 mm/tahun.
Penelitian mengenai geodinamika di Pulau Sumatera dilakukan oleh Pratama, dkk., (2013) dengan tujuan untuk menghitung vektor pergeseran dari plot time series data pengamatan stasiun Sumatran GPS Array (SuGAr) sebelum dan sesudah terjadi gempa di laut disekitar zona subduksi Sumatera. Data yang digunakan yaitu stasiun UMLH (Ujung Muloh) yang diolah dan dianalisis dengan perangkat lunak GAMIT. Hasil pengolahan data menunjukkan bahwa stasiun UMLH mengalami pergeseran ke arah utara (X) sebesar 9,8 cm, pergeseran ke arah timur (Y) sebesar 16,7 cm, dan untuk koordinat Z sebesar 4,3 cm.
Penelitian juga dilakukan oleh Anggarini (2014) dengan tujuan untuk menghitung untuk mengetahui pola dan besar kecepatan pergerakan stasiun SuGAr serta besar dan pola regangannya. Data yang digunakan adalahdata pengamatan 10 stasiun SuGAr dengan 15 stasiun IGS. Lokasi 10 stasiun SuGAr yang digunakan untuk penelitan berada di sekitar Pulau Nias, Batu, Siberut, Sipora, dan Pulau Pagai. Pengolahan data menggunakan GAMIT/GLOBK 10.5 dan grid_strain 2D. Hasil yang diperoleh dari penelitian Anggarini (2014) adalah nilai vektor kecepatan pergeseran stasiun SuGAr pada rentang tahun 2011 s.d 2012 berkisar antara 2 s.d 10 cm/tahun, pada rentang tahun 2012 s.d 2013 berkisar antara 0,6 s.d 5 cm/tahun, dan pada rentang tahun 2011 s.d 2013 berkisar antara 0,2 s.d 5 cm/tahun.
Perbedaan penelitian ini dengan penelitian-penelitian sebelumnya adalah penelitian ini bertujuan untuk menghitung vektor kecepatan pergeseran horisontal di wilayah Sumatera bagian utara menggunakan 5 stasiun GNSS CORS Sumatran GPS
Array (SuGAr) yang berada di Pulau Simeulue dan Aceh, serta 4 stasiun GNSS
CORS Badan Informasi Geospasial (BIG) yang berada di Sumatera Utara dan Aceh pada data pengamatan tahun 2011, 2012 dan 2013 dengan menggunakan 12 titik ikat global IGS. Perangkat lunak yang digunakan dalam penelitian ini adalah GAMIT/GLOBK 10.5.
I.8. Landasan Teori
I.8.1. Pergeseran
Pergeseran atau translasi merupakan perpindahan posisi materi sesuai dengan sumbu koordinat acuan tanpa mengalami perubahan bentuk (Widjajanti, 1997). Pergeseran merupakan analisis yang menunjukkan perubahan posisi suatu benda dengan menggunakan data perbedaan posisi yang diperoleh dari perataan data pengamatan pada kala berbeda (Rusmen, 2013).
Dalam ilmu geodinamika jenis-jenis pergeseran lempeng tektonik yang dikemukakan oleh Kenzie dan Parker (1967) dapat dibagi menjadi tiga macam, yaitu: 1. Pergeseran lempeng saling mendekat
Pergeseran lempeng yang saling mendekat dapat menyebabkan terjadinya tumbukan yang salah satu lempengnya menunjam ke bawah tepi lempeng yang lain. Contoh pergeseran lempeng ini di Indonesia adalah pertemuan Lempeng Indo-Australia dan Lempeng Eurasia.
2. Pergeseran lempeng saling menjauh
Pergeseran lempeng yang saling menjauh menyebabkan penipisan dan peregangan kerak bumi hingga terjadi aktivitas keluarnya material baru yang membentuk jalur vulkanisme. Meskipun saling menjauh, kedua lempeng ini tidak terpisah karena di belakang masing-masing lempeng terbentuk kerak lempeng yang baru. Proses ini berlangsung secara berkelanjutan. Contoh hasil dari pergeseran lempeng ini adalah terbentuknya gunung api di punggung tengah samudra di Samudra Pasifik dan Benua Afrika.
3. Pergeseran lempeng saling melewati
Pergeseran lempeng yang saling melewati terjadi karena gerak lempeng sejajar dengan arah yang berlawanan sepanjang perbatasan antar lempeng. Pada pergeseran ini kedua perbatasan lempeng hanya bergesekan. Oleh sebab itu, tidak terjadi penambahan atau pengurangan luas permukaan. Namun, gesekan antar lempeng ini kadang-kadang dengan kekuatan dan tegangan yang besar sehingga dapat menimbulkan gempa yang besar. Contoh hasil dari pergeseran
lempeng ini adalah Patahan San Andreas di California. Patahan tersebut terbentuk karena Lempeng Amerika utara bergerak ke arah selatan, sedangkan Lempeng Pasifik bergerak ke arah utara. Batas antar lempeng yang saling melewati dengan gerakan yang sejajar disebut batas menggunting (shear boundaries).
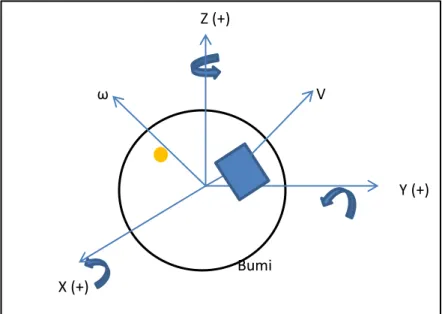
Pergeseran lempeng tektonik erat kaitannya dengan teorema euler fixed point atau yang dikenal dengan nama euler pole. Teorema euler fixed point menjelaskan bahwa setiap pergerakan lempeng tektonik di permukaan bumi berotasi mengelilingi suatu sumbu atau pole (Rusmen, 2013). Parameter rotasi euler terdiri atas kutub
euler (lintang dan bujur) serta kecepatan sudut rotasi. Ilustrasi parameter rotasi euler
ditunjukkan Gambar I.2.
Gambar I.2 menunjukkan parameter rotasi euler. Kutub euler ditunjukkan oleh lingkaran kuning, sedangkan blok lempeng ditunjukkan oleh kotak warna biru. Kecepatan sudut rotasi blok dinyatakan sebagai ω, dan kecepatan blok dinyatakan sebagai V. Dalam model parameter rotasi euler ini bumi dimodelkan dalam bentuk bulat atau bola.
Data stasiun GNSS CORS SuGAr dan BIG yang digunakan dalam penelitian ini terletak di Blok Sunda. Berdasarkan penelitian Henri (2013), solusi parameter rotasi Blok Sunda adalah 46,202 ± 0,620 oN untuk lintang kutub euler, dan -85,899 ±
Bumi X (+)
Y (+) Z (+)
ω V
0,256 oE untuk bujur kutub euler. Sedangkan kecepatan sudut rotasi Blok Sunda adalah 0,370 ± 0,004 derajat/juta-tahun. Estimasi parameter Blok Sunda tersebut menunjukkan bahwa Blok Sunda bergerak berlawanan arah jarum jam dengan kecepatan 25 s.d 35 mm/tahun.
I.8.2. Sistem Koordinat Geosentrik dan Toposentrik
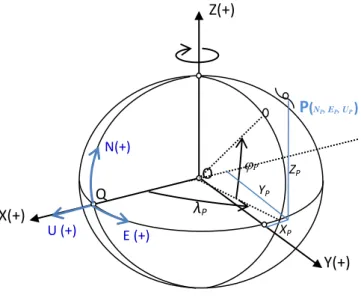
Hasil pengolahan data GNSS menggunakan GAMIT/GLOBK menghasilkan koordinat stasiun pengamatan dalam sistem koordinat kartesi 3D dan koordinat toposentrik. Ilustrasi hubungan sistem koordinat kartesi 3D dan toposentrik ditunjukkan Gambar I.3.
Gambar I.3. Hubungan sistem koordinat geosentrik dan sistem koordinat toposentrik (modifikasi dari Fahrurrazi, 2011)
Keterangan:
O : origin sistem koordinat geosentrik Q : origin sistem koordinat toposentrik
Model matematis yang digunakan dalam transformasi ditunjukkan pada persamaan I.1, I.2, dan I.3 (Prijatna dan Wedyanto, 2005).
[ ] [ ] …..………...….…...……(I.1) O N(+) E (+) U (+) λP Q Y(+) X(+) Z(+) P P(NP, EP, UP ) ZP XP YP
[ ] [ ]……….….………..….……….…(I.2) ( ) [ ]…...…….………….(1.3)
Dalam hal ini,
NP, EP, UP : komponen koordinat toposentrik
φ
Q,λ
Q : lintang geodetik dan bujur geodetikXQ, YQ, ZQ : koordinat titik ikat (geosentrik) XP, YP, ZP : koordinat titik pantau
Δx, Δy, Δz : selisih antara koordinat titik pantau dan titik ikat
R : matriks rotasi
Dalam penentuan posisi suatu titik di permukaan bumi, titik nol dari sistem koordinat yang digunakan dapat berlokasi di titik pusat massa bumi (sistem koordinat geosentrik), maupun di salah satu titik di permukaan bumi (sistem koordinat toposentrik). Sistem koordinat geosentrik banyak digunakan dalam metode-metode penentuan posisi ekstraterestris yang menggunakan satelit. Sistem koordinat toposentrik banyak digunakan dalam metode-metode penentuan posisi terestris (Abidin, 2000).
I.8.3. GNSS
Global Navigation Satellite Systems (GNSS) adalah salah satu metode
penentuan posisi yang memadukan beberapa sistem navigasi satelit. GNSS terdiri dari satelit (space segment), stasiun di permukaan bumi (control system segment) dan pemakai (user segment) yang dimanfaatkan di seluruh dunia dan di banyak bidang masyarakat (Gadimova dan Haubold, 2009).
Teknologi GNSS yang paling dikenal adalah Global Positioning System (GPS) yang dikembangkan oleh Departemen Pertahanan Amerika Serikat dan saat ini dikelola oleh United States Air Force 50th Space Wing. Sistem sejenis yang lain
adalah GLONASS dan di masa depan beberapa sistem yang lain adalah Galileo Eropa dan Compass Cina (Schwieger, dkk., 2009).
I.8.4. Countinously Operating Referrence Station
Continuously Operating Referrence Station (CORS) adalah suatu teknologi
berbasis GNSS yang berwujud sebagai suatu jaring kerangka geodetik yang pada setiap titiknya dilengkapi dengan receiver yang mampu menangkap sinyal dari satelit-satelit GNSS yang beroperasi secara penuh dan kontinyu selama 24 jam perhari, 7 hari per minggu dengan mengumpukan, merekam, mengirim data, dan memungkinkan para pengguna (users) memanfaatkan data dalam penentuan posisi, baik secara post processing maupun secara real time (NOAA, 2006).
I.8.5. ITRS dan ITRF
ITRS direalisasikan dengan koordinat dan kecepatan pergeseran sejumlah titik stasiun pengamatan ekstra terestrial di permukaan bumi (fiducial point) yang tergabung dalam International Terrestrial Reference Frame (ITRF). Koordinat stasiun ITRF merealisasikan origin dan orientasi salib sumbu koordinat geodetik. Stasiun ITRF bergerak karena gerak lempeng tektonik sehingga koordinatnya senantiasa berubah secara dinamis dengan pola yang bervariasi antara satu titik dengan titik yang lain. Untuk pemeliharaan ITRS Stasiun ITRF diamati secara berkelanjutan dengan teknik-teknik Very Long Baseline Interferometry ( VLBI),
Lunar Laser Ranging (LLR), Solar Laser Ranging (SLR), GNSS dan DORIS. Dari
data pengamatan ini kemudian diturunkan solusi parameter posisi dan kecepatan pergeseran titik-titik stasiun ITRF dan besaran lainnya misalnya parameter EOP (Fahrurrazi, 2011).
I.8.6. IGS
International GNSS Service (IGS) menyediakan data yang berkualitas tinggi
dan produk standar untuk Global Navigation Satellite Systems (GNSS) yang mendukung untuk penelitian ilmu kebumian, aplikasi multidisiplin, dan pendidikan. IGS mengumpulkan, mengarsipkan, dan mendistribusikan set data observasi GPS untuk memenuhi tujuan dari berbagai aplikasi, studi ilmiah dan rekayasa. Set data observasi GPS digunakan untuk menghasilkan produk-produk seperti berikut:
1. Ephemerides satelit GPS 2. Ephemerides satelit GLONASS 3. Parameter rotasi bumi
4. Koordinat dan kecepatan stasiun IGS 5. Informasi jam satelit GPS dan stasiun IGS 6. Perkiraan Zenith tropospheric path delay 7. Peta ionosfer global
Produk dari IGS mendukung kegiatan ilmiah seperti meningkatkan dan memperluas International Earth Rotation Service (IERS), International Terrestrial
Reference Frame (ITRF), pemantauan deformasi bumi, serta menentukan orbit satelit
ilmiah dan pemantauan ionosfer (IGS, 2015).
I.8.7. Differencing Data GPS
Differencing technique adalah teknik untuk mengeliminasi dan mereduksi dari
berbagai kesalahan dan bias pada data fase dengan cara menyelisihkan dua besaran pengamatan fase. Beberapa teknik differencing, yaitu single difference, double
difference, triple difference.
Pengamatan Single Difference (SD) dapat dilakukan dengan menggunakan dua
receiver A,B dan satu satelit (1) dimana kesalahan ephemeris (orbit) dan kesalahan
λφ
λφ
λφ
ρ
λ
δ
φ
φ
dengan menggunakan dua receiver dan dua satelit (1,2) dimana kesalahan jam
receiver dapat dieliminasi.
Pengamatan Triple Difference (TD) dapat dilakukan dengan menggunakan dua
receiver, dua satelit, dan dua epoch pengamatan dimana ambiguitas fase dapat
dieliminasi. Secara matematis metode differencing dirumuskan pada persamaan I.4 s.d I.6 (Kornhauser, 2006).
…………...…….(I.4) 12 ρ12AB (t) + N 12AB .………..(I.5) 12 = ρ12AB (t12) ……….…...………..………(I.6)
Dalam hal ini,
λφ
AB(t)
: jarak fase (carrier phase) satelit (1) dan receiver (A dan B) padaN
1AB : jarak antara receiver (A dan B) dengan satelit (1) pada epoch tρ
1AB(t)
: ambiguitas fase dari pengamatan fase sinyal-sinyal L1 dan L2darisatelit(1) dan receiver (A dan B)
c : kecepatan cahaya dalam ruang vakum (m/s) λ : panjang gelombang dari sinyal (m)
ϕ : fase gelombang yang terukur
cδ
AB(t
0)
: kesalahan dan offset dari jam receiver (A dan B) pada epoch t0I.8.8. Kesalahan dan Bias GPS
Kualitas dari data dipengaruhi oleh level dari kesalahan dan bias yang mempengaruhi data pengamatan fase. Kesalahan dan bias ada yang berkaitan dengan satelit (seperti kesalahan jam receiver, kesalahan antena, dan noise), data pengamatan (ambiguitas fase dan cycle slips), dan lingkungan sekitar receiver GPS (seperti multipath).
Kesalahan dan bias GPS harus diperhitungkan secara benar dan baik, karena hal tersebut akan mempengaruhi ketelitian informasi (posisi, kecepatan, percepatan, waktu) yang diperoleh serta proses penentuan ambiguitas fase dari sinyal GPS (SNI, 2002). Jenis-jenis kesalahan dan bias yang mempengaruhi data pengamatan GPS ditunjukkan pada Gambar I.4.
Strategi pengamatan yang diaplikasikan juga akan mempengaruhi efek dari kesalahan dan bias pada data pengamatan. Disamping itu struktur dan tingkat kecanggihan dari perangkat lunak pemroses data GPS akan dipengaruhi oleh mekanisme yang digunakan dalam menangani kesalahan dan bias. Pada penentuan posisi dengan GPS, secara umum ada beberapa cara yang dapat digunakan dalam menghadapi kesalahan dan bias GPS (SNI, 2002), yaitu:
1. estimasi parameter dari kesalahan dan bias dalam proses hitung perataan, 2. menerapkan mekanisme differencing antar data,
3. menghitung besarnya kesalahan/bias berdasarkan data ukuran langsung, 4. menghitung besarnya kesalahan/bias berdasarkan model,
5. mengunakan strategi pengamatan yang tepat, atau 6. mengunakan strategi pengolahan data yang tepat.
Satelit GPS • Kesalahan orbit (ephemeris) • Kesalahan jam satelit Ambiguitas fase ?
Pada survei GPS, pereduksian efek dari kesalahan dan bias tersebut biasanya dilakukan dengan mekanisme differencing antar data, pemendekan panjang baseline yang diamati, maupun dengan menggunakan strategi pengamatan serta pengolahan data yang tepat (SNI, 2002).
I.8.9. GAMIT/GLOBK
GPS Analysis of Massachusset Institute of Technology (GAMIT) adalah
perangkat lunak ilmiah untuk pengolahan data GNSS. GAMIT dilengkapi fasilitas pengeditan pengaturan dalam pengolahan data, pemilihan penggunaan titik ikat global sebagai parameter dan perhitungan parameter lainnya seperti parameter atmosfer, orientasi bumi (EOP), pasang surut dan cuaca yang menjadikan hasil dari pengolahan data GNSS sangat teliti (Herring, dkk., 2010).
GLOBK merupakan suatu paket program yang dapat mengkombinasikan data survei teristris dan ekstrateristris. File input pada pengolahan GLOBK adalah matriks kovarians dari data koordinat stasiun, parameter rotasi bumi, parameter orbit, dan koordinat hasil pengamatan lapangan (Herring, dkk., 2006). File yang digunakan untuk pengolahan GLOBK adalah h-file yang merupakan hasil pengolahan GAMIT. GLOBK dapat mengkombinasikan hasil pengolahan data pengamatan harian untuk menghasilkan koordinat stasiun rata-rata dari pengamatan multidays,
mengkombinasikan hasil pengamatan selama bertahun-tahun untuk menghasilkan koordinat stasiun, dan melakukan estimasi koordinat stasiun dari pengamatan individual yang digunakan untuk menghasilkan time series koordinat.
I.8.10. Perataan jaring pada GAMIT/GLOBK
I.8.10.1. Perataan jaring pada GAMIT. Perangkat lunak GAMIT menggunakan metode double difference dan prinsip metode parameter berbobot dalam perhitungan data pseudorange dan carrier phase (Herring, dkk., 2010).
La = F(Xa) ...(I.7)
yang mempunyai vektor koordinat XA, YA, ZA pada stasiun A dan XB, YB, ZB
pada stasiun B dan melakukan pengamatan terhadap dua satelit yaitu i dan j maka persamaan double difference seperti pada persamaaan I.8 dan I.9
A
Xi t
XA
Yi t
YA
Zi t
ZA
...(I.8)
B
X j t
XB
Y j t
YB
Z j t
ZB
…...(I.9)Dengan koordinat stasiun A dianggap memiliki suatu nilai pendekatan yaitu
XA,YA , ZA
sehingga menjadi persamaan I.10 : XA = X0A + dXAYA = Y0A + dYA ………….………...……….(I.10)
ZA = Z0A + dZA
Kemudian persamaan (I.8) dan (I.9) dilinearisasi menjadi : A
t
A cx i
t)
.dXA cyi
t)
.dYA czi
t)
.dZA………....………(I.11) B
t
B cx j
t)
.dXB cy j
t)
.dYB cz j
t)
.dZB…………...(I.12)Dalam hal ini,
cx : turunan persamaan terhadap dX
cy : turunan persamaan terhadap dY
cz : turunan persamaan terhadap dZ
Selanjutnya dilakukan substitusi persamaan di atas ke dalam persamaan (I.13), sehingga menghasilkan penyelesaian double difference sebagai berikut:
LABij
t
rCABij
t
ABij
t
cxij
t
dXAcyij
t
dYAczij
t
dZANABij…(I.13) Kemudian diperoleh solusi dari double diffrence seperti yang ditunjukkan padapersamaan I.14.LABij
t
rCABij
t
ABij 0
t
cxij
t
.dXAcyij
t
.dYAczij
t
.dZA.NABij..(I.4) Matrik bobot ditunjukkan pada persamaan (I.15) dan persamaan matrik residu pada (I.16).P = [ ]..………….………....(I.15) V = A X + L ...(I.16) Dimana : A = [cxij
t cyij
t czij
t ]………..………
I.17)
L [cxij
t cyij
t czij
t ]………...…...…….(I.18) X =[ ] ………..….………...………...(I.19) Keterangan: V : matrik residu L : matrik observasi P : matrik bobot A : matrik desain X : matrik parameterρ : jarak geometri antara satelit dengan titik pengamatan
N : ambiguitas fase
i,j : satelit yang teramat A, B : stasiun pengamatan (X0,Y0,Z0) : koordinat pendekatan titik
ABij : jarak satelit-pengamat pendekatan
Setelah melakukan perataan jaring dengan menggunakan GAMIT, proses selanjutnya yaitu melakukan pengikatan ke kerangka referensi ITRF dari loosely
I.8.10.2. Perataan jaring pada GLOBK. GLOBK merupakan proses Kalman Filtering untuk mengkombinasikan solusi-solusi hasil pengolahan data primer hasil pengamatan terrestrial maupun ekstra terrestrial. Terdapat tiga program utama dalam GLOBK, yaitu GLRED, GLORG, dan GLOBK. GLOBK sendiri merupakan proses Kalman Filtering untuk mengkombinasikan data pengolahan harian GAMIT untuk mendapatkan estimasi posisi rata-rata titik pengamatan. Pengikatan titik-titik pengamatan terhadap titik-titik referensi dilakukan dengan GLORG, GLRED hampir sama dengan GLOBK, bedanya GLRED memperlakukan h-files dari masing-masing hari secara terpisah, sehingga ketelitian posisi yang diperoleh dapat digabungkan per waktu tertentu (Herring, dkk., 2006). Kalman Filtering merupakan sekumpulan persamaan matematik dengan cara perhitungan yang rekursif dan efisien untuk mengestimasi state dari sebuah proses, sehingga dapat meminimalkan Mean Square
Error (MSE). Kalman Filtering berguna untuk mengestimasi state yang telah lalu,
saat ini, dan juga state masa depan, dan mampu bekerja meskipun sifat-sifat model sistem tidak diketahui (Welch dan Bishop, 2012).
I.8.11. Evaluasi pengolahan GAMIT/GLOBK
I.8.11.1. Evaluasi hasil pengolahan GAMIT. Untuk mengevaluasi hasil pengolahan GAMIT dapat dilakukan dengan menganalisis nilai fract dan postfit nrms sebagai output dari pengolahan GAMIT. Postfit nrms merupakan perbandingan nilai varians aposteriori dan varians apriori untuk unit bobot. Standar kualitas postfit nrms adalah ± 0,25. Apabila nilai postfit nrms lebih besar dari 0,5 maka mengindikasikan masih terdapat efek cycle slip yang belum dihilangkan berkaitan dengan parameter bias ekstra atau terdapat kesalahan dalam pemodelan (Herring, dkk., 2010).
Nilai fract merupakan perbandingan antara nilai adjust dan nilai formal. Nilai
fract digunakan untuk menganalisis apakah terdapat nilai adjust yang janggal dan
perlu tidaknya iterasi untuk mendapatkan nilai adjust yang bebas dari efek
non-linear. Nilai adjust menunjukkan besarnya perataan yang diberikan pada parameter
hitungan, sedangkan nilai formal menunjukkan ketidakpastian pada pemberian bobot untuk perhitungan kuadrat terkecil. Kontrol kualitas nilai fract adalah nilai fract tidak boleh lebih dari 10 (Herring, dkk., 2006).
I.8.11.2. Evaluasi hasil pengolahan GLOBK. Untuk mengevaluasi hasil pengolahan GLOBK dapat dilihat pada log file dan plot time series. Log file menunjukkan konsistensi data harian secara internal dan plot time series digunakan untuk melihat data outliers. Log file berisi nilai stastistik termasuk simpangan baku yang digunakan untuk analisis terhadap nilai koordinat hasil olahan, sedangkan plot
time series menampilkan nilai weighted root mean square (wrms) dan normal root mean square (nrms). Nilai wrms yang baik adalah di bawah 10 milimeter (Panuntun,
2012). Selain itu, evaluasi hasil pada GLOBK dapat dilihat dari nilai statistik
chi-squared incremental per degree of freedom x2/f dimana nilai x2/f tidak boleh melebihi
10 dan limit maksimal adalah 30 (Lestari, 2006).
I.8.12. Perhitungan Kecepatan dengan GLOBK
GLOBK merupakan proses Kalman Filter untuk mengkombinasikan solusi-solusi hasil pengolahan data primer hasil pengamatan terrestrial maupun ekstra terrestrial seperti yang dijelaskan pada subbab I.8.10.2. Model matematis yang digunakan untuk menghitung kecepatan disajikan pada persamaan I.20.
……….……….(I.20)
Dalam hal ini,
: koordinat stasiun pengamatan pada kala t : koordinat stasiun pengamatan pada kala t0
V : kecepatan
I.8.13. Perhitungan Vektor Pergeseran
Besar dan arah pergeseran horisontal stasiun pengamatan dapat dihitung dengan persamaan I.21 dan persamaan I.22.
...(I.22)
Dalam hal ini,
, : koordinat stasiun pengamatan pada project i , : koordinat stasiun pengamatan pada project j
dH : resultan pergeseran horisontal
α : azimuth atau arah pergeseran horisontal
I.8.14. Ketelitian Pengukuran
Terdapat beberapa istilah yang digunakan untuk menggambarkan kehandalan pengukuran, yaitu ketelitian (precision), ketepatan (accuracy), dan ketidakpastian (uncertainty) (Mikhalin dan Gracie, 1981).
1. Ketelitian/presisi adalah tingkat kedekatan hasil pengukuran yang berulang terhadap obyek yang sama. Ukuran yang biasanya digunakan untuk ketelitian adalah simpangan baku. Semakin tinggi ketelitian, maka semakin kecil simpangan bakunya, dan sebaliknya.
2. Ketepatan/akurasi adalah tingkat kedekatan dari suatu hasil pengukuran terhadap nilai yang dianggap benar. Ketepatan/akurasi tidak hanya akibat dari kesalahan acak, akan tetapi juga bias yang ada karena kesalahan sistematik yang tidak terkoreksi. Jika tidak terjadi bias, maka simpangan baku juga bisa dipakai sebagai ukuran akurasi/ketepatan.
3. Ketidakpastian adalah suatu jangkauan yang berisi kesalahan pengukuran. Suatu tingkat dari kemungkinan umumnya dikaitkan dengan ketidakpastian. Secara umum, jika ketidakpastian dari suatu pengukuran diketahui, maka ketidakpastian itu akan menyertai nilai pengukuran.
Salah satu penentuan nilai yang mewakili pada data yang jumlahnya banyak adalah dengan mencari nilai rata-rata dari keseluruhan data. Keakurasian suatu data dilihat dari nilai simpangan baku. Kepresisian data dilihat dari nilai koefisien
standard eror. Persamaan nilai rata-rata, simpangan baku, dan standard eror
ditunjukkan pada persamaan I.23, I.24, dan persamaan I.25 (Widjajanti, 2011).
̅
∑ .………...………..…….……….(I.23)√∑ ̅ ………...………..……….………..(I.24)
̅
√ …..….………..……..….……….(I.25)
Dalam hal ini,
̅
: nilai rata-rata 𝑖 : data ke-𝑖: simpangan baku ̅ : standard eror : jumlah data
I.8.15. Sumatran GPS Array
Sumatran GPS Array (SuGAr) merupakan stasiun CORS yang tersebar
sepanjang 1300 km di pantai barat Pulau Sumatera, Indonesia. Sumatran GPS Array (SuGAr) diinisiasi oleh Professor Kerry Sieh dkk dari California Institute of
Technology (CalTech) Tectonics Observatory (TO) berkolaborasi dengan Earth Observatory of Singapore (EOS) dan Lembaga Ilmu Pengetahuan Indonesia (LIPI)
pada tahun 2002 (McCaughey, 2012).
Pada Gambar I.5 bisa dilihat persebaran stasiun GNSS CORS SuGAr yang setiap harinya merekam data GPS dengan akurasi tinggi secara kontinyu, dan mengirimkan data ke server pusat untuk postprocessing di Singapura. Solusi dari data SuGAr digunakan untuk mendukung pengukuran deformasi bumi seperti mendeteksi pergerakan tektonik dan membantu dalam memahami peristiwa seismik pada area dengan tingkat aktifitas tektonik yang tinggi. (McCaughey, 2012).
Gambar I.5 menunjukkan persebaran stasiun GNSS CORS SuGAr yang berada di sekitar kepulauan Simeulue dan Aceh. Stasiun GNSS CORS SuGAr yang beroperasi di wilayah kepulauan Simeulue dan Aceh sebelum tahun 2011 berjumlah 5 stasiun yaitu BNON, BSIM, LEWK, PBLI,dan UMLH.
I.8.16. Uji Signifikansi Beda Dua Parameter
Uji statistik yang digunakan pada penelitian ini adalah uji signifikansi beda dua parameter. Uji tersebut digunakan untuk mengetahui nilai perbedaan yang signifikan antara dua parameter dengan distribusi t-student. Model matematis yang digunakan sesuai dengan persamaan (I.26) dan (I.27) (Widjajanti, 2010).
Gambar I.5. Persebaran Stasiun GNSS CORS SuGAr di Pulau Sumatera, Indonesia (McCaughey, 2012)
t = √
….………..……...………...….……..(I.26)
t ≤ t (α/2,df)
………..………...……....…….…(I.27)
Dalam hal ini,
t : nilai t hitungan
α/2 : tingkat kepercayaan sebesar α/2 df : degree of freedom sebesar df
t (α/2,df)
: nilai pada tabel t-student dengan tingkat kepercayaan sebesar α/2 dan df x1 : koordinat stasiun pada project 1
x2 : koordinat stasiun pada project 2 : varian koordinat stasiun pada project 1 : varian koordinat stasiun pada project 2
Penolakan hipotesis nol (H0) apabila kriteria tidak sesuai dengan persamaan
I.27. Penolakan H0 mengindikasikan bahwa dua parameter berbeda secara signifikan,
sedangkan penerimaan H0 mengindikasikan bahwa dua parameter tidak berbeda
secara signifikan.
I.9. Hipotesis
Hipotesis dalam penelitian ini adalah nilai kecepatan pergeseran horisontal koordinat stasiun GNSS CORS SuGAr dan BIG diduga bervariasi dengan nilai berkisar antara 4 cm/tahun sampai dengan 7 cm/tahun. Nilai pergeseran dalam hipotesis didapat berdasarkan penelitian yang dilakukan oleh Prawirodirjo, dkk., (2000) yang menyebutkan bahwa Pulau Sumatera merupakan wilayah pertemuan lempeng Indo-Asutralia menunjam ke bawah lempeng Eurasia dengan kecepatan sekitar 5 cm/tahun sampai dengan 6 cm/tahun.