THE PLANE ROTATION OPERATOR AS
A MATRIX FUNCTION
by Emil Olteanu
Abstract. Formalism in mathematics can offer many simplifications, but it is an instrument which should be carefully treated as it can easily create confusions. Formalism is an instrument which, together with a programming language that allows abstractions (for instance the C language) can create a very strong programming instrument. One example is realizing the matrix functions in C language using pointers.
The present material refers to an example of matrix functions, the exponential matrix function, used as a plane rotation operator.
A matrix function is a function of the form: Y = F
( )
X , where X and Y are quadratic matrices of order n. The relation can also be written as follows:
=
nn n n n n nn n n n nx
x
x
x
x
x
x
x
x
F
y
y
y
y
y
y
y
y
y
K
K
K
K
K
K
K
K
K
K
K
K
K
K
2 1 2 22 21 1 12 11 2 1 2 22 21 1 12 11 .In the case of the plane rotations we shall use matrices of order 2 and for rotations in a three-dimension space we use matrices of order 3.
In order to associate a matrix with a linear transformation of a n-dimensional vectorial space V, we must choose a basis x1, x2, ..., xn. From the equations:
or
( )
∑
=
=
ni i ij j
a
x
x
A
1
we obtain the matrix which represents the transformation :
nn n
n
n n
a a
a
a a
a
a a
a
A A
K K K K K
K K
2 1
2 22
21
1 12
11
=
→ .
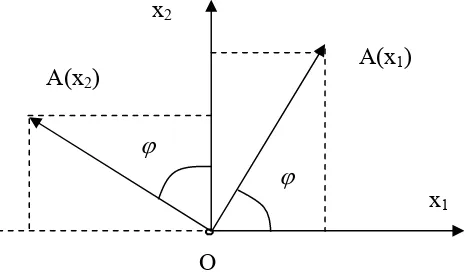
[image:2.595.232.466.299.437.2]If A is the transformation obtained through the rotation of the plane around the origin O with an angle
ϕ
and if x1 and x2 are two vectors from the basis orthogonal and of length 1, then the representatives of these vectors applied in the origin apply to the representatives of images A(x1) and A(x2).Figure 1.
A(x1) and A(x2) verify the following equations:
( )
( )
( )
( )
( )
( )
× +
× −
=
× +
× =
2 1
2
2 1
1
cos sin
sin cos
x x
x A
x x
x A
ϕ
ϕ
ϕ
ϕ
The operator A is represented by the matrix A :
x
1x2
A(x
1)
ϕ
ϕ
( )
( )
( )
ϕ
ϕ
cos
( )
ϕ
ϕ
sin
sin
cos
−
=
A
The operator A-1 is the rotation of angle
ϕ
in the opposite direction, that is of angle−
ϕ
.( )
( )
( )
ϕ
ϕ
( )
ϕ
ϕ
sin
( )
ϕ
( )
ϕ
cos
( )
( )
ϕ
ϕ
sin
cos
cos
sin
sin
cos
1
−
=
−
−
−
−
−
=
−
A
we verified the relation
A
×
A
−1=
U
, the unity vector.( )
( )
( )
( )
×
−
( )
( )
( )
( )
=
−
=
×
−ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
sin
cos
sin
cos
cos
sin
sin
cos
1
A
A
( )
( )
( ) ( )
( ) ( )
( ) ( )
( ) ( )
( )
( )
= =U+ −
− +
=
1 0
0 1
cos sin
sin cos cos
sin
cos sin sin
cos sin
cos
2 2
2 2
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
Given a vector
=
2 1
x x
X in plane we can obtain a vector =
2 1
Y Y
Y rotated
by an angle
α
towards which we apply the plane rotation operator Y =F( )
α
×X , where:( )
=
( )
( )
−
( )
( )
α
α
α
α
α
cos
sin
sin
cos
F
The product of two angle rotations
α
andβ
is equivalent to an angle rotationβ
α
+
. This is mathematically expressed as follows: F( ) ( ) (
α
×Fβ
= Fα
+β
)
. The function that verifies this functional equation is the exponential function. This leads us to the conclusion that the rotation operator can be expressed as an exponential. In order to find the exponential function corresponding to this operator we search for a differential equation to verify and then we look for its solutions.( )
α
=
cos
( )
( )
α
α
−
sin
( )
α
( )
α
⇒
( )
α( )
( )
αα( )
α( )
α( )
α( )
α( )
( )
αα( )
( )
αα( )
α( )
α I F( )
αF = ×
−
× − =
− − −
=
−
=
cos sin
sin cos
0 1
1 0 sin
cos
cos sin
cos' sin'
sin' cos'
'
where we noted
−
=
0
1
1
0
I
.We obtained the equation: F'
( )
α
=I×F( )
α
. This equation can also be written F'( )
α
= I×F( )
α
. Generally speakingA
×
B
≠
B
×
A
, but in this case the multiplication is commutative. From the equation:( ) ( )
= F ×I ⇒ F'α
α
( ) ( )
×
=
⇒
−
F
I
F
1α
'
α
( ) ( )
×
=
∫
⇒
∫
F
−1α
F
'
α
d
α
I
d
α
( ) ( )
×
=
∫
⇒
∫
F
−1α
dF
α
I
d
α
( )
(
Fα
)
=Iα
+C ⇒ ln( )
I Ce
F
α
=
α+for
α
=
0
⇒
F
( )
0
=
e
C⇒
( )
e
e
e
F
( )
0
F
α
=
Iα×
C=
Iα×
The formula can also be written:
( )
( )
α
e
IαF
F
=
0
where( )
C
e
F
0
=
.We make an assumption
( )
=
=
=
1
0
0
1
0
e
0U
⇒
=
4 3 2 11
0
0
1
CC CCe
⇒ = 4 3 2 1 1 0 0 1 ln C C C CWe calculate
1
0
0
1
ln
using the development in a series of exponentials.(
)
∑
∞ ==
+
⇒
1ln
nn
x
x
U
, where we noted with
=
1
0
0
1
U
, the unit matrix and with xa matrix variable 4 3 2 1 x x x x . For
=
=
0
0
0
0
O
x
, where O is zero matrix, results:(
+
)
=
∑
∞=
=
=
0
0
0
0
0
0
ln
1O
n
U
n .Therefore C = O, meaning Ci = 0, for i
∈
{1, 2, 3, 4}. Thus:( )
( )
( )
( )
( )
αα
α
α
α
α
Ie
F
=
−
=
cos
sin
sin
cos
.This formula can also be written in another manner:
( )
α
( )
α
Iαe
I
U
×
cos
+
×
sin
=
,which is another way of writing Euler’s formula in the field of matrix functions. We notice that the following relation is true:
U
I
=
−
References
[1] W. Kecs - Complemente de matematici cu aplicaţii în tehnică (Mathematics Complements with Techical Applications) , Editura Tehnică, Bucureşti, 1981.
[2] I. Gh. Şabac - Matematici speciale (Special Mathematics), Editura Didactică şi Pedagogică, Bucureşti, 1981.
[3] Crstici Borislav (coordonator), ş.a. - Matematici speciale (Special Mathematics) , Editura Didacticăşi Pedagogică, Bucureşti, 1981.
[4] Gheorghe Coman ş.a. - Introducere în teoria ecuaţiilor operatoriale (Introduction to the Theory of Operator Equations) , Editura Dacia, Cluj-Napoca, 1976.
[5] I. M. Gelfand şi G. E. Şilov - Funcţii generalizate (Generalized Functions) , Editura Ştiinţificăşi Enciclopedică, Bucureşti, 1983.
[6] Fazlollah Reza - Spaţii liniare (Linear Spaces) , Editura Didactică şi Pedagogică, Bucureşti, 1973.