PENELITIAN OSILASI GANDENG DENGAN
MENGGUNAKAN SMARTPHONE SEBAGAI SENSOR
PERCEPATAN
Skripsi
Diajukan Untuk Memenuhi Salah Satu Syarat Memperoleh Gelar Sarjana
Pendidikan Program Studi Pendidikan Fisika
Oleh:
Nino Munawanto
NIM: 101424021
PROGRAM STUDI PENDIDIKAN FISIKA
JURUSAN PENDIDIKAN MATEMATIKA DAN ILMU PENGETAHUAN
ALAM
FAKULTAS KEGURUAN DAN ILMU PENDIDIKAN
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
ii
PENELITIAN OSILASI GANDENG DENGAN
MENGGUNAKAN SMARTPHONE SEBAGAI SENSOR
PERCEPATAN
Skripsi
Diajukan Untuk Memenuhi Salah Satu Syarat Memperoleh Gelar Sarjana
Pendidikan Program Studi Pendidikan Fisika
Oleh:
Nino Munawanto
NIM: 101424021
PROGRAM STUDI PENDIDIKAN FISIKA
JURUSAN PENDIDIKAN MATEMATIKA DAN ILMU PENGETAHUAN
ALAM
FAKULTAS KEGURUAN DAN ILMU PENDIDIKAN
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
HALAMAN PERSEMBAHAN
Skripsi ini penulis persembahkan untuk:
Munawar dan Sri Isti (Orang tua penulis)
Hanik Risnawati (Saudara Perempuan penulis)
Keluarga Besar Program Studi Pendidikan Fisika Universitas Sanata Dharma
dan semua pihak yang telah mendukung penulis
PERNYATAAN KEASLIAN KARYA
Saya menyatakan dengan sesungguhnya bahwa skripsi yang saya tulis ini
tidak memuat karya atau bagian karya orang lain, kecuali yang telah disebutkan
dalam kutipan dan daftar pustaka, sebagaimana layaknya karya ilmiah.
Yogyakarta, 12 Agustus 2014
Penulis
LEMBAR PERNYATAAN PERSETUJUAN
PUBLIKASI KARYA ILMIAH UNTUK KEPENTINGAN AKADEMIS
Yang bertanda tangan di bawah ini, saya mahasiswa Universitas Sanata
Dharma:
Nama : Nino Munawanto
Nomor mahasiswa : 101424021
Demi pengembangan ilmu pengetahuan, saya memberikan kepada perpustakaan
Universitas Sanata Dharma karya ilmiah saya yang berjudul:
“PENELITIAN OSILASI GANDENG DENGAN MENGGUNAKAN SMARTPHONE SEBAGAI SENSOR PERCEPATAN”
Dengan demikian, saya memberikan kepada perpustakaan hak untuk
menyimpan, mengalihkan dalam bentuk media lain, mengolahnya dalam bentuk
pangkalan data, mendistribusikannya secara terbatas dan mempublikasikannya di
internet atau media lain untuk kepentingan akademis tanpa perlu meminta izin
dari saya maupun memberikan royalti kepada saya selama tetap mencantumkan
nama saya sebagai penulis.
Demikian pernyataan ini yang saya buat dengan sebenarnya.
Dibuat di Yogyakarta
Pada tanggal: 12 Agustus 2014
Yang menyatakan,
viii
ABSTRAK
PENELITIAN OSILASI GANDENG DENGAN MENGGUNAKAN
SMARTPHONE SEBAGAI SENSOR PERCEPATAN
Telah dilakukan penelitian sistem osilasi yang terdiri dari dua massa dan
tiga pegas yang tergabung menjadi satu. Sistem diamati menggunakan smartphone
sebagai sensor percepatan dan dilakukan tanpa gesekan di atas air track. Awalnya, gerak benda dipelajari pada mode normal osilasi gandeng. Pada mode normal
simetris dan asimetris, hasil pengukuran konstanta pegas menunjukkan kemiripan
dengan pengukuran melalui sistem osilasi sebuah pegas dengan smartphone.
Selanjutnya, osilasi gandeng dipelajari sebagai gabungan dari kedua mode normal.
Hasil eksperimen menunjukkan bahwa smartphone mampu digunakan secara
praktis untuk mengukur percepatan benda yang bergerak harmonik.
ix
ABSTRACT
A STUDY OF COUPLED OSCILLATIONS USING SMARTPHONE AS
ACCELERATION SENSOR
Oscillations have been studied with two masses and three springs which are
coupled together. The system was studied frictionless on air track surface and use
the smartphone as acceleration sensor. In beginning, symmetric and asymmetric
normal modes were studied. Results for the spring constant agree very well with
measurement obtained by single spring and smartphone oscillations method.
Later, coupled oscillations was studied as combination of normal modes. Results
represent that smartphone acceleration sensors is valuable measurements
instruments for study acceleration of harmonic motion.
x
KATA PENGANTAR
Puji dan syukur penulis panjatkan kepada Allah S.W.T atas segala rahmat,
kasih, karunia serta penyertaan yang diberikan kepada penulis selama penyusunan
skripsi yang berjudul “PENELITIAN OSILASI GANDENG DENGAN
MENGGUNAKAN SMARTPHONE SEBAGAI SENSOR PERCEPATAN”.
Skripsi ini disusun sebagai salah satu syarat untuk memperoleh gelar sarjana
pendidikan di Program Studi Pendidikan Fisika Fakultas Keguruan dan Ilmu
Pendidikan, Universitas Sanata Dharma Yogyakarta.
Penulis menyadari bahwa penyusunan skripsi ini dapat terselesaikan dengan
baik karena adanya bantuan dari berbagai pihak. Oleh karena itu, pada
kesempatan ini penulis ingin mengucapkan terima kasih kepada:
1. Bapak Dr. Ign. Edi Santosa, M.S. selaku Ketua Program Studi
Pendidikan Fisika, dosen Program Studi Pendidikan Fisika dan Dosen
Pembimbing Skripsi yang dengan penuh kesabaran telah membimbing,
membantu, mendampingi, memotivasi serta meluangkan waktunya
kepada penulis selama masa perkuliahan, penelitian dan proses
penulisan skripsi ini.
2. Bapak Rohandi, Ph.D. selaku Dekan Fakultas Keguruan dan Ilmu
pendidikan Universitas Sanata Dharma dan Dosen Pembimbing
Akademik yang telah mendampingi dan membimbing selama
perkuliahan.
3. Bapak Ngadiono sebagai laboran yang telah banyak membantu penulis
xi
4. Ayahku, Munawar dan ibuku, Sri Isti serta kakakku, Hanik Risnawati
yang selama ini selalu mendoakan, memotivasi, dan mendukung
penulis dalam banyak hal.
5. Emerentiana Astuti yang selalu mendukung, memotivasi,
mendengarkan keluhan penulis dengan sabar, dan telah meminjamkan
smartphone miliknya untuk penelitian ini.
6. Agustinus Bekti S., Elisabeth Dian A., Eliya Agustina M., Serly Eka F.,
Laras Nandya, Willy Mulyati, Hany Sri Wahyuni, Osri Jua, Gloria
Pasaribu dan Nita Indra Purwanti yang telah menemani, mendukung
dan membantu selama penelitian.
7. Semua pihak yang tidak dapat penulis sebutkan satu persatu yang telah
membantu penulis selama menyelesaikan studi dan menyelesaikan
skripsi.
Penulis menyadari bahwa dalam penyusunan dan penulisan skripsi ini masih
belum sempurna. Penulis dengan besar hati mengharapkan kritik dan saran.
Semoga skripsi ini dapat bermanfaat bagi para pembaca dan memberikan sedikit
sumbangan untuk Ilmu Pengetahuan.
Yogyakarta, 12 Agustus 2014
xii
DAFTAR ISI
Halaman
HALAMAN JUDUL ... ii
HALAMAN PERSETUJUAN DOSEN PEMBIMBING ... iii
HALAMAN PENGESAHAN ... iv
HALAMAN PERSEMBAHAN ... v
HALAMAN PERNYATAAN KEASLIAN KARYA ... vi
HALAMAN PERNYATAAN PERSETUJUAN PUBLIKASI ILMIAH UNTUK KEPENTINGAN AKADEMIS ... vii
ABSTRAK ... viii
ABSTRACT ... ix
KATA PENGANTAR ... x
DAFTAR ISI ... xii
DAFTAR GAMBAR ... xv
BAB I PENDAHULUAN ... 1
A. Latar Belakang ... 1
B. Rumusan Masalah ... 3
C. Batasan Masalah ... 4
D. Tujuan Penelitian ... 4
xiii
F. Sistematika Penulisan ... 4
BAB II DASAR TEORI ... 6
A. Osilasi Pegas Massa ... 6
B. Osilasi Gandeng ... 8
B.1 Mode Normal Simetris ... 14
B.2 Mode Normal Asimetris ... 14
C. Osilasi Gandeng Mode Gabungan ... 15
BAB III METODE PENELITIAN... 16
A. Menghitung Nilai Konstanta Pegas Melalui Sistem Osilasi Pegas-Massa ... 16
B. Osilasi Gandeng ... 19
B.3 Osilasi Gandeng Mode Simetris ... 23
B.4 Osilasi Gandeng Mode Asimetris ... 24
B.5 Osilasi Gandeng Mode Gabungan ... 25
BAB IV HASIL DAN PEMBAHASAN ... 26
A. Hasil ... 26
xiv
A.3 Osilasi Gandeng Mode Normal Asimetris ... 31
A.4 Osilasi Gandeng Mode Gabungan ... 33
B. Pembahasan ... 36
B.1 Menghitung Nilai Konstanta Pegas Menggunakan Sistem Osilasi Pegas-massa ... 36
B.2 Seting Peralatan Osilasi Gandeng ... 38
B.2 Osilasi Gandeng Mode Normal Simetris ... 40
B.3 Osilasi Gandeng Mode Normal Asimetris ... 43
B.4 Osilasi Gandeng Mode Gabungan ... 46
B.5 Perbandingan Frekuensi Sudut Pada Eksperimen ... 50
B.6 Gangguan Pada Eksperimen Osilasi Gandeng ... 51
BAB V KESIMPULAN DAN SARAN ... 57
A. Kesimpulan ... 57
B. Saran ... 57
DAFTAR PUSTAKA ... 58
xv
DAFTAR GAMBAR
Halaman
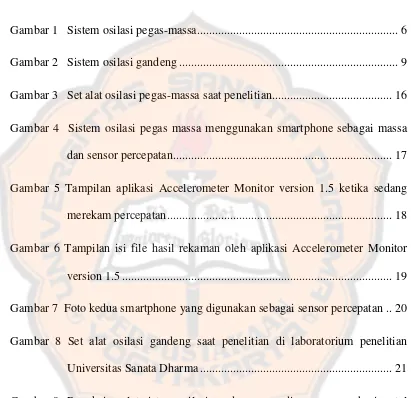
Gambar 1 Sistem osilasi pegas-massa... 6
Gambar 2 Sistem osilasi gandeng ... 9
Gambar 3 Set alat osilasi pegas-massa saat penelitian... 16
Gambar 4 Sistem osilasi pegas massa menggunakan smartphone sebagai massa
dan sensor percepatan... 17
Gambar 5 Tampilan aplikasi Accelerometer Monitor version 1.5 ketika sedang
merekam percepatan ... 18
Gambar 6 Tampilan isi file hasil rekaman oleh aplikasi Accelerometer Monitor
version 1.5 ... 19
Gambar 7 Foto kedua smartphone yang digunakan sebagai sensor percepatan .. 20
Gambar 8 Set alat osilasi gandeng saat penelitian di laboratorium penelitian
Universitas Sanata Dharma ... 21
Gambar 9 Rangkaian alat sistem osilasi gandeng yang disusun secara horizontal
1
BAB I
PENDAHULUAN
A. Latar Belakang
Osilasi merupakan gerak bolak-balik benda melewati titik setimbang
yang terjadi secara periodik. Gerak bolak-balik dua benda atau lebih yang
saling terhubung satu dengan yang lain disebut osilasi gandeng. Fenomena
osilasi gandeng dapat ditemukan di alam seperti vibrasi yang terjadi pada
atom zat padat [Stokes, 1987]. Fenomena ini menjadi fokus pada kuliah
fisika zat padat karena menjadi dasar untuk mempelajari sistem serupa yang
lebih kompleks.
Telah banyak cara digunakan untuk mempelajari sistem ini. Salah satu
yang paling sederhana adalah menggunakan bandul, pegas dan motion detektor [Carnevali dan Newton, 2000]. Dua bandul terpisah yang digantungkan menggunakan batang besi digabungkan oleh sebuah pegas
penggandeng. Perubahan panjang pada pegas mengakibatkan kedua bandul
tersebut berosilasi. Sebuah motion detektor mendeteksi gerak osilasi gandeng dari bandul tersebut. Namun, metode ini terbatas hanya mengamati osilasi
pada simpangan yang kecil. Gerak benda yang kecil kurang baik dideteksi
oleh motion detector.
Sistem osilasi gandeng dapat terdiri dari massa dan pegas yang disusun
secara horizontal. Pada sistem ini gerak benda mudah diamati karena benda
bergerak pada satu garis lurus. Osilasi gandeng pada susunan ini bisa
gerak harmonik sederhana dengan baik pada keadaan horizontal tanpa
gesekan dengan melakukan eksperimen di atas air track.
Sekarang ini perkembangan teknologi dunia semakin canggih. Hal ini
berdampak pada dunia penelitian. Telah banyak gadget yang digunakan untuk membantu penelitian. Salah satunya, penggunaan kamera digital untuk
mengambil video gerakan osilasi pada bandul [Limiansih dan Santosa, 2012].
Baru-baru ini video digunakan untuk mempelajari redaman pada
osilasi gandeng. Salah satu metode yang memanfaatkan video adalah IRT
(Image Recognition Technique). Pada metode ini, benda yang berosilasi dalam video secara otomatis posisinya ditandai menggunakan software
[Monsoriu et al, 2005]. Pergerakan posisi benda secara otomatis diperoleh
tanpa harus menandai video secara manual. Walaupun penggunaan IRT
sangat presisi namun membutuhkan kemampuan komputer yang mahir.
Selain itu, metode ini menggunakan konsep matematika yang sulit dipahami
oleh siswa.
Gadget lain yang bisa digunakan untuk membantu penelitian adalah smartphone. Perangkat ini digunakan untuk mempelajari redaman pada benda
yang berosilasi [Castro-Palacio et al, 2013]. Smartphone dilengkapi sensor
percepatan yang secara otomatis mendeteksi percepatan benda yang
berosilasi. Hasilnya perangkat ini mampu menampilkan redaman dengan
IRT. Data diperoleh secara otomatis tanpa perlu kemampuan komputer yang
mahir.
Dari beberapa hal yang telah dijelaskan, smartphone dan air track akan digunakan untuk mempelajari osilasi gandeng. Di era yang modern ini,
keberadaan smartphone tidak asing lagi bagi setiap orang. Dengan bantuan
perangkat ini, pelaksanaan eksperimen akan lebih praktis karena data secara
otomatis diperoleh saat itu juga. Selain itu, eksperimen menjadi lebih cepat
karena pengoperasian smartphone yang mudah.
Sekarang ini telah banyak kalangan yang menggunakan smartphone
untuk kepentingan komunikasi. Survei menujukan bahwa sebanyak 52%
anak-anak dan remaja di Indonesia telah menggunakan smartphone untuk
mengakses internet [Nuraini, 2014]. Perangkat yang telah akrab dengan siswa
ini sangat mungkin jika digunakan sebagai alat bantu pembelajaran bagi
mereka.
B. Rumusan Masalah
Berdasarkan latar belakang tersebut dapat dirumuskan masalah yaitu:
1. Bagaimana gerak osilasi benda pada sistem osilasi gandeng yang disusun
horizontal?
2. Bagaimana menggunakan sensor percepatan pada smartphone untuk
C. Batasan Masalah
Pada penelitian ini masalah dibatasi pada:
1. Sistem osilasi gandeng yang diamati hanya terdiri dari dua benda dengan
tiga buah pegas.
2. Osilasi gandeng hanya diamati secara horizontal pada permukaan air track.
D. Tujuan Penelitian
Penelitian ini bertujuan untuk:
1. Mengetahui gerak benda yang berosilasi pada sistem osilasi gandeng.
2. Mengetahui penggunaan sensor percepatan pada smartphone untuk
mengamati peristiwa osilasi gandeng.
E. Manfaat Penelitian
Bagi pembaca, manfaat dari penelitian adalah:
1. Memanfaatkan smartphone sebagai sensor percepatan untuk mengamati
gerak benda.
2. Menggunakan sensor percepatan smartphone pada pembelajaran agar
lebih menarik.
F. Sistematika Penulisan
Bab I menguraikan tentang latar belakang masalah, rumusan masalah,
batasan masalah, tujuan penelitian, manfaat penelitian dan sistematika
penulisan.
BAB II Dasar Teori
Bab II menguraikan tentang dasar-dasar teori pendukung dalam
penelitian.
BAB III Eksperimen
Bab III menguraikan tentang tempat pelaksanaan penelitian, alat dan
bahan yang digunakan dalam penelitian, dan langkah-langkah penelitian.
BAB IV Hasil dan Pembahasan
Bab IV menguraikan tentang hasil penelitian dan pembahasan hasil
penelitian.
BAB V Penutup
6
BAB II
DASAR TEORI
A. Osilasi Pegas Massa
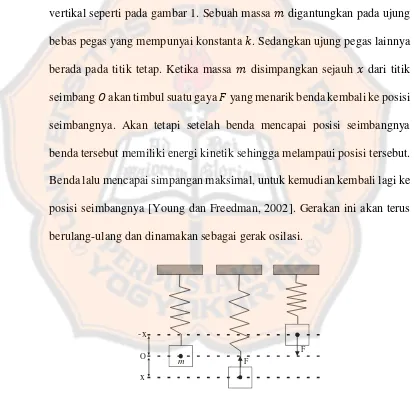
Sistem ini terdiri dari sebuah massa dan pegas yang disusun secara
vertikal seperti pada gambar 1. Sebuah massa 𝑚 digantungkan pada ujung
bebas pegas yang mempunyai konstanta 𝑘. Sedangkan ujung pegas lainnya
berada pada titik tetap. Ketika massa 𝑚 disimpangkan sejauh 𝑥 dari titik
seimbang 𝑂 akan timbul suatu gaya 𝐹 yang menarik benda kembali ke posisi
seimbangnya. Akan tetapi setelah benda mencapai posisi seimbangnya
benda tersebut memiliki energi kinetik sehingga melampaui posisi tersebut.
Benda lalu mencapai simpangan maksimal, untuk kemudian kembali lagi ke
posisi seimbangnya [Young dan Freedman, 2002]. Gerakan ini akan terus
berulang-ulang dan dinamakan sebagai gerak osilasi.
Gambar 1. Sistem osilasi pegas-massa. Benda bermassa m dijauhkan dari titik keseimbangan. Gaya pemulih F menjaga benda tetap berosilasi.
Suatu gaya yang memulihkan benda ke posisi seimbangnya disebut
sebagai gaya pemulih. Gaya pegas merupakan gaya pemulih pada sistem
ini. Apabila benda disimpangkan sejauh 𝑥⃗ dari kedudukan seimbangnya,
pegas yang memiliki konstanta 𝑘 mengerjakan gaya pemulih 𝐹. Sesuai
dengan Hukum Hooke, vektor gaya tersebut yaitu:
𝐹⃗ = −𝑘𝑥⃗ (2.1)
keterangan:
𝐹⃗: gaya pemulih (𝑁)
𝑘: konstanta pegas (𝑁 𝑚⁄ )
𝑥⃗: simpangan benda (𝑚)
Gaya pemulih inilah yang menjaga agar benda tetap berosilasi
[Young dan Freedman, 2002]. Benda akan terus berosilasi selama tidak ada
gesekan dengan udara. Selama berosilasi benda bermassa 𝑚 bergerak
dengan percepatan 𝑎⃗. Hubungan gaya pemulih dengan gerak benda
dinyatakan pada persamaan (2.2).
𝑚𝑎⃗ = −𝑘𝑥⃗ (2.2)
Persamaan (2.2) dapat diubah menjadi bentuk:
𝑑2𝑥 𝑑𝑡2 +
𝑘
𝑚𝑥 = 0 (2.3)
Solusi dari persamaan (2.23) adalah,
𝑥 = 𝐴 sin(𝜔𝑡 + 𝜃) (2.4)
dengan 𝐴 adalah amplitudo, 𝜃 adalah sudut fase dan 𝜔 adalah frekuensi
𝜔 = √𝑚𝑘 (2.5)
dengan 𝑘 adalah konstanta pegas dan 𝑚 adalah massa benda.
Percepatan benda yang berosilasi dapat dinyatakan pada persamaan
(2.6).
𝑎 = −𝐴𝜔2sin(𝜔𝑡 + 𝜃) (2.6)
keterangan:
𝑎: percepatan benda yang berosilasi (𝑚 𝑠⁄ 2)
𝐴: amplitudo (𝑚)
𝜔: frekuensi sudut (𝑟𝑎𝑑 𝑠⁄ )
𝑡: waktu osilasi (𝑠)
𝜃: sudut fase (𝑟𝑎𝑑)
B. Osilasi Gandeng
Osilasi gandeng mempunyai susunan yang lebih kompleks dari
osilasi sederhana. Osilasi gandeng dengan dua derajat kebebasan memiliki
dua koordinat linier untuk menentukan gerakan semua benda.
Sistem ini terdiri dari dua buah benda dan tiga buah pegas yang
disusun secara horizontal seperti pada gambar 2. Pegas 1 menghubungkan
massa 𝑚1 dengan titik tetap. Pegas 2 menghubungkan antara 𝑚1 dengan
sisi lainnya. Pegas yang menghubungkan antara dua massa disebut sebagai
pegas penggandeng.
Gambar2. Kedua benda masing-masing dijauhkan dari titik keseimbangannya sebesar 𝑥1dan 𝑥2 sehingga mengalami gaya pemulih 𝐹1 dan 𝐹2.
Seperti yang telah diketahui, hukum Hooke menyatakan perubahan
panjang pada pegas mengakibatkan gaya pemulih sebesar 𝐹. Ketika benda
1 dengan massa 𝑚1 disimpangkan ke arah kanan sejauh 𝑥1, pegas 1
mengalami pertambahan panjang sebesar 𝑥1. Pertambahan panjang pada
pegas 1 mengakibatkan massa 𝑚1 mengalami gaya pemulih sebesar 𝐹𝑝1 ke
arah kiri.
Benda dengan massa 𝑚1 disimpangkan ke arah kanan sejauh 𝑥1
mengakibatkan pegas 2 mengalami pengurangan panjang sebesar 𝑥1.
Pengurangan panjang pada pegas 2 menyebabkan massa 𝑚1 mengalami
gaya pemulih sebesar 𝐹𝑝21 ke arah kiri.
Smentara itu, benda dengan massa 𝑚2 disimpangkan ke arah kanan
sejauh 𝑥2. Simpangan tersebut mengakibatkan pertambahan panjang pegas
2 sebesar 𝑥2. Pertambahan panjang pada pegas 2 menyebabkan 𝑚1
m1 m2
k1 k2 k3
x1 O2 x2 O1
mengalami gaya pemulih sebesar 𝐹𝑝22 ke arah kanan. Oleh karena itu
resultan gaya pada massa 𝑚1 besarnya:
𝐹1 = 𝐹𝑝1+ 𝐹𝑝21− 𝐹𝑝22 (2.7)
Sehingga persamaan geraknya adalah:
𝑚1𝑎1 = (−𝑘1𝑥1) + (−𝑘2𝑥1) + 𝑘2𝑥2 (2.8)
𝑚1𝑑2𝑥1
𝑑𝑡 = −𝑘1𝑥1− 𝑘2(𝑥1− 𝑥2) (2.9)
Pada massa 𝑚2, pegas 3 mengalami pengurangan panjang ketika
massa disimpangkan ke arah kanan sejauh 𝑥2. Pengurangan panjang pada
pegas 3 mengakibatkan massa 𝑚2 mengalami gaya pemulih sebesar 𝐹3 ke
arah kiri. Simpangan pada massa 𝑚2 mengakibatkan pegas 2 mengalami
pertambahan panjang sejauh 𝑥2. Pertambahan panjang pada pegas 2
menyebabkan massa 𝑚2 mengalami gaya pemulih sebesar 𝐹22 ke arah kiri.
Selain itu, pegas 2 mengalami pengurangan panjang sejauh 𝑥1 sehingga
muncul gaya pemulih sebesar 𝐹21 ke arah kanan. Oleh karena itu resultan
gaya pada massa 𝑚2 besarnya:
𝐹2 = 𝐹𝑝3 + 𝐹𝑝22− 𝐹𝑝21 (2.10)
Sehingga persamaan geraknya adalah:
𝑚2𝑎2 = −𝑘2𝑥2 − 𝑘3𝑥2 + 𝑘2𝑥1 (2.11)
𝑚2𝑑2𝑥2
Jika kedua massa benda sama (𝑚1 = 𝑚2 = 𝑚) dan ketiga konstanta
pegas sama (𝑘1 = 𝑘2 = 𝑘3 = 𝑘0), persamaan (2.9) dan (2.12) menjadi:
𝑚𝑑2𝑥1
𝑑𝑡 = −2𝑘𝑥1 + 𝑘𝑥2 (2.13)
𝑚𝑑2𝑥2
𝑑𝑡 = −2𝑘𝑥2+ 𝑘𝑥1 (2.14)
Persamaan (2.13) dan (2.14) masih menunjukkan kedua tipe dari
kopling dan dapat dipisahkan dengan mengenalkan persamaan baru:
𝑞1 = (𝑥1+ 𝑥2) (2.15)
𝑞2 = (𝑥2− 𝑥1) (2.16)
Pengaturan persamaan (2.15) dan (2.16) menghasilkan:
𝑚𝑑2𝑞1
𝑑𝑡2 + 𝑘0𝑞1 = 0 (2.17)
𝑚𝑑2𝑞2
𝑑𝑡2 + 3𝑘0𝑞2 = 0 (2.18)
Solusi dari persamaan (2.17) adalah:
𝑞1 = 𝐴1𝑠𝑖𝑛(𝜔1𝑡 + 𝜃1) (2.19)
dengan 𝐴1 adalah amplitudo 1, 𝜃1 adalah sudut fase 1 dan 𝜔1 adalah
frekuensi sudut 1 yang besarnya:
keterangan:
𝜔1 : frekuensi sudut (𝑟𝑎𝑑 𝑠⁄ )
𝑘 : konstanta pegas (𝑁/𝑚)
𝑚 : massa (𝑘𝑔)
Atau bisa dalam bentuk persamaan:
𝜔1 = 2𝜋𝑇
1 (2.21)
keterangan:
𝑇1 : periode osilasi 1 (𝑠)
Solusi dari persamaan (2.18) adalah:
𝑞2 = 𝐴2𝑠𝑖𝑛(𝜔2𝑡 + 𝜃2) (2.22)
dengan 𝐴2 adalah amplitudo 2, 𝜃2 adalah sudut fase 2 dan 𝜔2 adalah
frekuensi sudut 2 yang besarnya:
𝜔2 = √3𝑘𝑚 (2.23)
keterangan:
𝜔2 : frekuensi sudut (𝑟𝑎𝑑 𝑠⁄ )
𝑘 : konstanta pegas (𝑁/𝑚)
𝑚 : massa (𝑘𝑔)
𝜔2 =2𝜋𝑇2 (2.24)
keterangan:
𝑇2: periode osilasi 2 (𝑠)
Persamaan (2.15) dan (2.16) diubah menjadi:
𝑥1 = 12(𝑞1+ 𝑞2) (2.25)
𝑥2 =12(𝑞1− 𝑞2) (2.26)
Persamaan (2.19) dan (2.22) disubtitusikan pada persamaan (2.25)
dan (2.26). Kemudian hasil subtitusi persamaan tersebut diturunkan dua kali
terhadap waktu sehingga diperoleh persamaan:
𝑎1 =𝑑
osilasi gandeng tergantung dari keadaan inisial atau keadaan awal kedua
benda. Kedua benda berosilasi pada satu frekuensi (𝜔1 atau 𝜔2) apabila
frekuensi ini dinamakan sebagai osilasi gandeng mode normal. Terdapat
dua mode normal yaitu mode simetris dan mode asimetris [Castro-Palacio,
2013].
B.1 Mode Normal Simetris
Dalam mode normal ini benda berosilasi hanya pada frekuensi
normal 𝜔1. Pada mode ini simpangan awal kedua benda searah dan
jarak simpangannya sama besar [Castro-Palacio, 2013].
Oleh karena simpangan awal 𝑥1 = 𝑥2 maka pada persamaan
(2.16) besar 𝑞2 = 0. Persamaan (2.27) dan (2.28) menjadi:
B.2 Mode Normal Asimetris
Dalam mode normal ini benda berosilasi hanya pada frekuensi
normal 𝜔2. Pada mode ini simpangan awal kedua benda berlawanan
arah dan jarak simpangannya sama besar [Castro-Palacio, 2013].
Oleh karena simpangan awal 𝑥1 = −𝑥2 maka pada persamaan
C. Osilasi Gandeng Mode Gabungan
Mode ini merupakan gabungan dari kedua mode simetris dan
asimetris [Castro-Palacio, 2013]. Pada mode ini masing-masing benda
bergerak dengan dua frekuensi yaitu 𝜔1 dan 𝜔2. Persamaan (2.27) dan
16
BAB III
METODE PENELITIAN
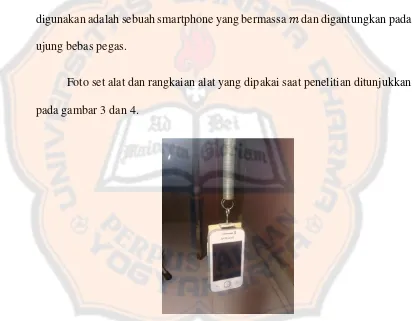
A. Menghitung Nilai Konstanta Pegas Melalui Sistem Osilasi Pegas-Massa
Sistem osilasi pegas-massa terdiri dari sebuah pegas dan sebuah massa
yang disusun secara vertikal. Pegas digantung pada sebuah statif. Massa yang
digunakan adalah sebuah smartphone yang bermassa 𝑚 dan digantungkan pada
ujung bebas pegas.
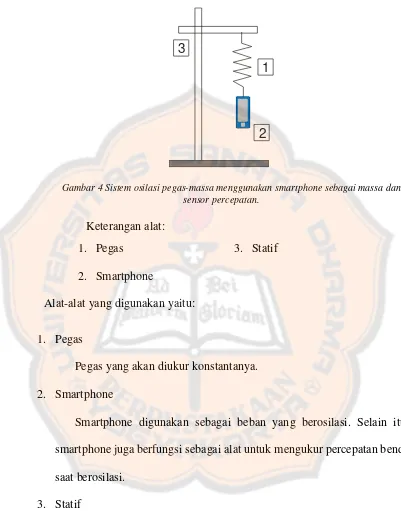
Foto set alat dan rangkaian alat yang dipakai saat penelitian ditunjukkan
pada gambar 3 dan 4.
Gambar 4 Sistem osilasi pegas-massa menggunakan smartphone sebagai massa dan sensor percepatan.
Keterangan alat:
1. Pegas 3. Statif
2. Smartphone
Alat-alat yang digunakan yaitu:
1. Pegas
Pegas yang akan diukur konstantanya.
2. Smartphone
Smartphone digunakan sebagai beban yang berosilasi. Selain itu,
smartphone juga berfungsi sebagai alat untuk mengukur percepatan benda
saat berosilasi.
3. Statif
Digunakan untuk menggantungkan pegas.
Saat berosilasi smartphone bergerak naik dan turun secara teratur.
Sensor percepatan pada smartphone mendeteksi percepatan yang dialami
selama berosilasi. Sensor ini mampu mendeteksi percepatan dalam tiga sumbu
1
yaitu sumbu X (𝑎𝑥), Y (𝑎𝑦) dan Z (𝑎𝑧). Smartphone digantungkan pada
keadaan tegak sehingga sensor mendeteksi percepatan osilasi pada sumbu Y.
Percepatan osilasi kemudian direkam menggunakan aplikasi yang telah
diinstal pada smartphone. Aplikasi bernama Accelerometer Monitor version
1.5 dan dapat diunduh dari PlayStore dengan mudah. Tampilan aplikasi
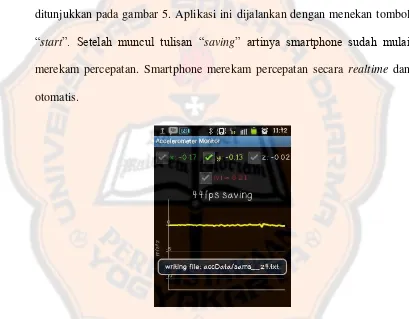
ditunjukkan pada gambar 5. Aplikasi ini dijalankan dengan menekan tombol
“start”. Setelah muncul tulisan “saving” artinya smartphone sudah mulai merekam percepatan. Smartphone merekam percepatan secara realtime dan otomatis.
Gambar 5. Tampilan dari aplikasi Accelerometer Monitor version 1.5 ketika sedang merekam percepatan. Garis kuning menunjukkan percepatan pada sumbu Y smartphone.
Hasil rekaman dari aplikasi berupa file dengan format Text Document.
File tersebut berisi data percepatan pada tiga sumbu beserta waktu osilasinya
seperti yang ditampilkan gambar 6. Resolusi dari sensor percepatan yaitu 𝛿𝑎 =
tersebut bisa ditampilkan dalam bentuk grafik menggunakan software.
Software yang digunakan dalam penelitian ini adalah LoggerPro versi 3.4.5.
Gambar 6. Tampilan isi dari file hasil rekaman percepatan oleh aplikasi Accelerometer Monitor version 1.5.
Data ditampilkan dalam bentuk grafik percepatan fungsi waktu
menggunakan software. Data waktu osilasi diset sebagai sumbu X grafik
sedangkan percepatan pada sumbu Y (𝑎𝑦) diset sebagai sumbu Y grafik.
Grafik dianalisa dengan cara fiting persamaan (2.6) pada grafik. Hasil fiting menunjukkan nilai dari besaran amplitudo, frekuensi sudut (𝜔0) dan sudut fase. Konstanta pegas dicari dengan memasukkan nilai 𝜔 dan massa 𝑚
(massa smartphone dan pengait) pada persamaan (2.5).
Metode yang sama juga dilakukan pada kedua pegas lainnya. Rata-rata
dari ketiga konstanta pegas ini mewakili satu nilai konstanta pegas yang akan
digunakan dalam eksperimen osilasi gandeng.
B. Osilasi Gandeng
Osilasi gandeng diamati dengan cara merekam percepatan kedua benda
yang berosilasi menggunakan smartphone di atas air track. Dua sensor
percepatan yang digunakan untuk merekam percepatan kedua benda berupa
smartphone merk Smartfren Andromax dan Samsung Galaxy Young. Tampilan
kedua smartphone ditunjukkan pada gambar 7.
Gambar 7. Foto kedua smartphone yang digunakan sebagai sensor percepatan. Smartfren Andromax-i sebelah kiri dan Samsung GT-S5360 sebelah kanan.
Foto set alat dan rangkaian alat yang dipakai saat penelitian ditunjukkan
pada gambar 8 dan 9.
1
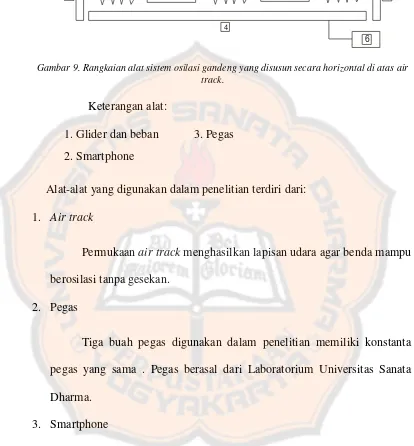
Gambar 9. Rangkaian alat sistem osilasi gandeng yang disusun secara horizontal di atas air track.
Keterangan alat:
1. Glider dan beban 3. Pegas
2. Smartphone
Alat-alat yang digunakan dalam penelitian terdiri dari:
1. Air track
Permukaan air track menghasilkan lapisan udara agar benda mampu berosilasi tanpa gesekan.
2. Pegas
Tiga buah pegas digunakan dalam penelitian memiliki konstanta
pegas yang sama . Pegas berasal dari Laboratorium Universitas Sanata
Dharma.
3. Smartphone
Dua buah smartphone yang digunakan yaitu smartphone Samsung
Galaxy Young GT-S5360 dan Smartfren Andromax-I.
4. Beban
Beban tambahan digunakan untuk menyamakan massa dari kedua
Pegas dan glider diatur seperti pada gambar rangkaian 9. Benda 1
dihubungkan menggunakan sebuah pegas pada penjepit sebelah kiri.
Sementara itu, benda 2 dihubungkan menggunakan sebuah pegas pada penjepit
sebelah kanan. Benda 1 dan 2 dihubungkan menggunakan sebuah pegas
penggandeng. Kemudian massa benda 1 dan 2 diatur agar sama dengan
menambahkan massa tambahan.
Percepatan benda 1 diukur menggunakan smartphone merk Smartfren.
Percepatan benda 2 diukur menggunakan smartphone merk Samsung. Kedua
smartphone diletakkan di atas glider dan direkatkan menggunakan selotip.
Smartphone diletakkan dalam posisi tidur menghadap arah yang sama seperti
pada gambar 8.
Selanjutnya pegas dan air track diset dalam keadaan baik. Posisi pegas diatur agar lurus jika dilihat dari atas dan samping dengan cara mengatur-atur
penjepit. Permukaan air track diatur agar horizontal dengan mengatur sekrup yang ada di bawah alat. Water pass digunakan untuk memastikan permukaan
telah benar-benar horizontal.
Setelah alat sudah siap terangkai, kedua smartphone disiapkan untuk
mengambil data. Aplikasi Accelerometer Monitor version 1.5 pada
Kedua benda kemudian disimpangkan sesuai dengan mode osilasi
gandeng. Kedua benda dilepaskan secara bersamaan sehingga akhirnya
berosilasi. Saat berosilasi smartphone secara otomatis merekam percepatan
yang dialami oleh benda.
Setelah osilasi selesai dilakukan, proses merekam dihentikan dengan
menekan tombol “𝑠𝑡𝑜𝑝”. Data yang diperoleh dalam format Text Document
kemudian ditampilkan dalam bentuk grafik dan dianalisa menggunakan
software pengolah data. Dalam penelitian ini digunakan software LoggerPro.
B.1 Osilasi Gandeng Mode Simetris
Pada osilasi gandeng mode simetris ini kedua benda disimpangkan
dengan arah simpangan sama dan jarak simpangan sama besar. Benda 1
disimpangkan ke arah kanan dengan jarak 5 cm dari titik seimbangnya.
Sementara itu, benda 2 disimpangkan ke arah kanan sejauh 5 cm dari titik
seimbangnya.
Setelah data ditampilkan dalam bentuk grafik percepatan fungsi waktu
selanjutnya grafik dianalisa. Dua grafik percepatan fungsi waktu dihasilkan
dalam sekali percobaan mode osilasi. Pada mode ini, grafik yang diperoleh
benda 1 difit menggunakan persamaan (2.29) sedangkan grafik yang diperoleh
benda 2 difit menggunakan persamaan (2.30).
Hasil fiting menunjukkan nilai besaran amplitudo, frekuensi sudut 𝜔1 dan sudut fase dari dari benda yang berosilasi. Nilai konstanta pegas 𝑘1 dari
dari smartphone, glider dan beban) ke dalam persamaan (2.20). Periode osilasi
𝑇1 pada mode ini dapat dicari dengan subtitusi nilai 𝜔1 ke dalam persamaan
(2.21).
B.2 Osilasi Gandeng Mode Asimetris
Persiapan yang sama dilakukan pada smartphone untuk merekam data.
Pada mode asimetris ini kedua benda disimpangkan dengan jarak simpangan
yang sama besar tetapi dengan arah simpangan yang berlawanan. Misal benda
1 disimpangkan ke arah kiri dengan jarak 3 cm dari titik seimbangnya.
Sementara itu, benda 2 disimpangkan ke arah kanan sejauh 3 cm dari titik
seimbangnya.
Data ditampilkan dalam bentuk grafik percepatan fungsi waktu lalu
grafik dianalisa. Dua grafik percepatan fungsi waktu dihasilkan dalam sekali
percobaan mode osilasi. Pada mode ini, grafik yang diperoleh benda 1 difit
menggunakan persamaan (2.31) sedangkan grafik yang diperoleh benda 2 difit
menggunakan persamaan (2.32).
Hasil fiting menunjukkan nilai besaran amplitudo, frekuensi sudut 𝜔2 dan sudut fase dari benda yang berosilasi. Nilai konstanta pegas 𝑘2 dari mode
ini bisa dicari dengan cara subtitusi nilai 𝜔2 dan 𝑚 ke dalam persamaan (2.23).
Periode osilasi 𝑇2 pada mode ini dapat dicari dengan subtitusi nilai 𝜔2 ke dalam
B.3 Osilasi Gandeng Mode Gabungan
Persiapan yang sama dilakukan pada smartphone untuk merekam data.
Khusus pada mode gabungan ini, benda 1 tidak disimpangkan sedangkan benda
2 disimpangkan. Misal benda 2 disimpangkan ke arah kanan dengan jarak 5 cm
dari titik seimbangnya. Sementara itu, benda 1 tidak disimpangkan (0 cm) atau
tetap pada kondisi seimbangnya.
Setelah data ditampilkan dalam bentuk grafik percepatan fungsi waktu
selanjutnya grafik dianalisa. Dua grafik percepatan fungsi waktu dihasilkan
dalam sekali percobaan mode osilasi. Pada mode ini grafik difit menggunakan
persamaan (2.27) untuk grafik yang diperoleh benda 1 sedangkan persamaan
(2.28) untuk grafik yang diperoleh benda 2.
Hasil fiting menunjukkan nilai besaran amplitudo, frekuensi sudut 𝜔31 dan 𝜔32 serta sudut fase dari benda yang berosilasi. Nilai konstanta pegas 𝑘31
dihitung dengan cara subtitusi nilai frekuensi sudut 𝜔31 ke dalam persamaan
(2.20). Sementara itu, konstanta pegas 𝑘32 dihitung dengan cara subtitusi nilai
frekuensi sudut 𝜔32 ke dalam persamaan (2.23), dengan massa benda sebesar
𝑚. Periode osilasi 𝑇31 dicari dengan subtitusi nilai frekuensi sudut 𝜔31 ke
dalam persamaan (2.21). Sementara itu, periode osilasi 𝑇32 dicari dengan
26
BAB IV
HASIL DAN PEMBAHASAN
A. Hasil
A.1 Menghitung Konstanta Pegas Dengan Sistem Osilasi Pegas-Massa
Tiga buah pegas akan digunakan untuk eksperimen osilasi
gandeng. Metode osilasi pegas-massa digunakan untuk menghitung
konstanta pegas tersebut. Hasil dari percobaan osilasi pegas-massa pada
ketiga pegas ditunjukkan pada grafik 1, 2 dan 3.
Grafik 1. Percepatan fungsi waktu dari smartphone yang bermassa 𝑚 = (0,1088 ±
0,0001) 𝑘𝑔 dalam sistem osilasi pegas-massa yang menggunakan pegas nomor 1.
Grafik 1 menunjukkan percepatan fungsi waktu dari suatu massa
dalam sistem osilasi pegas-massa yang menggunakan pegas nomor 1.
Massa yang digunakan adalah smartphone dengan massa 𝑚 =
(0,1088 ± 0,0001) 𝑘𝑔. Titik-titik data mengikuti garis fiting yang berbentuk sinusoida. Posisi beberapa titik-titik data melebihi puncak dan
Grafik 1 difit menggunakan persamaan (2.6). Fiting grafik menampilkan nilai amplitudo, frekuensi sudut dan sudut fase. Frekuensi
sudut diperoleh sebesar 𝜔01 = (9,454 ± 0,004) 𝑟𝑎𝑑 𝑠⁄ . Untuk
menghitung konstanta pegas nomor 1, frekuensi 𝜔01 dimasukkan pada
persamaan (2.5) dengan nilai 𝑚 = (0,1088 ± 0,0001) 𝑘𝑔. Konstanta
pegas nomor 1 diperoleh sebesar 𝑘01= (9,72 ± 0,01) 𝑁 𝑚⁄ . Cara
perhitungan hasil dan ralat ditunjukkan pada lampiran.
Grafik 2. Percepatan fungsi waktu dari smartphone yang bermassa 𝑚 = (0,1088 ±
0,0001) 𝑘𝑔 dalam sistem osilasi pegas-massa yang menggunakan pegas nomor 2.
Grafik 2 menunjukkan percepatan fungsi waktu dari suatu massa
yang berosilasi pada sistem osilasi pegas-massa yang menggunakan
pegas nomor 2. Massa yang digunakan adalah smartphone dengan massa
𝑚 = (0,1088 ± 0,0001) 𝑘𝑔. Titik-titik data mengikuti garis fiting yang berbentuk sinusoida. Posisi beberapa titik data melebihi puncak dan
lembah gelombang dari garis fiting.
Grafik 2 difit menggunakan persamaan (2.6). Frekuensi sudut
konstanta pegas nomor 2, frekuensi 𝜔02 dimasukkan pada persamaan
(2.5) dengan nilai 𝑚 = (0,1088 ± 0,0001) 𝑘𝑔. Konstanta pegas nomor
2 diperoleh sebesar 𝑘02 = (9,095 ± 0,009) 𝑁 𝑚⁄ . Cara perhitungan
hasil dan ralat ditunjukkan pada lampiran.
Grafik 3. Percepatan fungsi waktu dari smartphone yang bermassa 0,1088 kg dalam sistem osilasi pegas-massa yang menggunakan pegas nomor 3.
Grafik 3 menunjukkan percepatan fungsi waktu dari suatu massa
dalam sistem osilasi pegas-massa yang menggunakan pegas nomor 3.
Massa yang digunakan adalah smartphone dengan massa 𝑚 =
(0,1088 ± 0,0001) 𝑘𝑔. Titik-titik data mengikuti garis fiting yang berbentuk sinusoida. Posisi beberapa titik data melebihi puncak dan
lembah gelombang dari garis fiting.
Grafik 3 difit menggunakan persamaan (2.6). Frekuensi sudut
diperoleh dengan besar 𝜔03= (8,951 ± 0,003) 𝑟𝑎𝑑 𝑠⁄ . Untuk
menghitung konstanta pegas nomor 3, frekuensi 𝜔03 dimasukkan pada
pegas nomor 3 diperoleh sebesar 𝑘03 = (8,717 ± 0,009) 𝑁 𝑚⁄ . Cara
perhitungan hasil dan ralat ditunjukkan pada lampiran.
Rata-rata dari ketiga konstanta pegas di atas (𝑘01, 𝑘02dan 𝑘03)
merupakan nilai konstanta pegas keseluruhan (𝑘0). Besar konstanta
pegas keseluruhan yaitu 𝑘0 = (9,177 ± 0,009) 𝑁 𝑚⁄ .
A.2 Osilasi Gandeng Mode Normal Simetris
Pada eksperimen ini, sistem terdiri dari dua massa dan tiga pegas
yang disusun horizontal. Benda berosilasi pada frekuensi normal
tergantung dari simpangan awal benda. Benda berosilasi pada mode
normal simetris apabila simpangan awal kedua benda searah dan sama
besar (𝑥1 = 𝑥2).
Benda 1 dan 2 disimpangkan searah dengan jarak simpangan yang
sama besar. Benda 1 disimpangkan ke arah kanan sejauh 𝑥1 = 5 𝑐𝑚
sedangkan benda 2 disimpangkan ke kanan sejauh 𝑥2 = 5 𝑐𝑚 dari titik
seimbangnya. Kedua glider dilepaskan bersamaan sehingga akhirnya
berosilasi. Smartphone merekam percepatan benda seperti pada grafik 4.
Grafik 4 merupakan percepatan fungsi waktu dari dua benda
dengan massa 𝑚 = (0,2562 ± 0,0001) 𝑘𝑔 yang berosilasi pada mode
simetris. Titik-titik data mengikuti garis fiting persamaan yang bentuknya sinusoida. Pada bagian puncak dan lembah gelombang
sinusoida). Selain itu, posisi beberapa titik data melebihi puncak atau
lembah gelombang garis fiting.
Grafik 4.(a) Percepatan fungsi waktu saat mode simetris pada benda 1. (b) Percepatan fungsi waktu saat mode simetris pada benda 2. Simpangan awal kedua benda x1=x2=5
cm dan massa benda m1=m2=(0,2562 ± 0,0001) 𝑘𝑔.
Titik-titik data yang diperoleh benda 1 dan 2 mendekati garis fittng
yang berbentuk sinusoida. Grafik yang dihasilkan kedua benda memiliki
fase yang searah. Selain itu, periode dan amplitudo kedua grafik sama
besar.
Grafik 4.a difit menggunakan persamaan (2.29) dan grafik 4.b difit
menggunakan persamaan (2.30). Fiting grafik menampilkan nilai amplitudo, frekuensi sudut dan sudut fase grafik. Frekuensi sudut 𝜔1
(a)
diperoleh pada kedua grafik sebesar 𝜔1 = (5,690 ± 0,008) 𝑟𝑎𝑑/𝑠
untuk grafik 4.a dan 𝜔1 = (5,690 ± 0,005) 𝑟𝑎𝑑/𝑠 untuk grafik 4.b.
Rata-rata frekuensi sudut 𝜔1 dari kedua grafik diperoleh sebesar
𝜔1
̅̅̅̅ = (5,690 ± 0,006) 𝑟𝑎𝑑/𝑠. Untuk mencari konstanta pegas,
frekuensi sudut 𝜔̅̅̅̅1 dimasukkan pada persamaan (2.20), dengan massa
benda 𝑚 = (0,2562 ± 0,0001) 𝑘𝑔. Konstanta pegas yang dihitung
melalui mode simetris sebesar 𝑘1 = (8,29 ± 0,01) 𝑁 𝑚⁄ . Sementara itu,
periode 𝑇1 diperoleh dengan memasukkan 𝜔̅̅̅̅1 pada persamaan (2.21)
yang menghasilkan periode sebesar 𝑇1 = (1,104 ± 0,01)𝑠. Cara
perhitungan hasil dan ralat ditunjukkan pada lampiran.
A.3 Osilasi Gandeng Mode Asimetris
Osilasi gandeng yang diamati terdiri dari dua benda dan tiga pegas
yang berosilasi secara horizontal. Benda berosilasi pada frekuensi normal
tergantung dari simpangan awal benda. Benda berosilasi pada mode
normal asimetris apabila simpangan awal kedua benda berlawanan arah
dan dan sama besar (𝑥1 = −𝑥2).
Benda 1 dan 2 disimpangkan berlawanan arah dengan jarak
simpangan yang sama besar. Benda 1 disimpangkan ke arah kiri sejauh
𝑥1 = 3 𝑐𝑚 sedangkan benda 2 disimpangkan ke kanan sejauh 𝑥2 =
3 𝑐𝑚. Kedua benda kemudian dilepaskan secara bersamaan sehingga
akhirnya berosilasi. Smartphone merekam percepatan benda seperti pada
Grafik 5 merupakan percepatan fungsi waktu dari dua benda
dengan massa 𝑚 = (0,2562 ± 0,0001) 𝑘𝑔 yang berosilasi pada mode
asimetris. Titik-titik data mengikuti garis fiting persamaan yang bentuknya sinusoida. Posisi dari beberapa titik data melebihi puncak atau
lembah gelombang garis fiting.
Grafik 5. (a) Percepatan fungsi waktu saat mode asimetris pada benda 1. (b) Percepatan fungsi waktu saat mode asimetris pada benda 2. Simpangan awal kedua
benda x1=-3cm dan x2=3 cm dan massa benda m1=m2=(0,2562 ± 0,0001) 𝑘𝑔.
Titik-titik data yang diperoleh benda 1 dan 2 mendekati garis fiting yang berbentuk sinusoida. Grafik yang dihasilkan kedua benda memiliki
(a)
fase yang berlawanan. Selain itu, periode dan amplitudo kedua grafik
sama besar.
Grafik 5.a difit menggunakan persamaan (2.31) dan grafik 5.b difit
menggunakan persamaan (2.32). Dari fiting ini, frekuensi sudut 𝜔2 diperoleh pada kedua grafik sebesar 𝜔2 = (10,180 ± 0,003) 𝑟𝑎𝑑/𝑠
untuk grafik 5.a dan 𝜔2 = (10,170 ± 0,003) 𝑟𝑎𝑑/𝑠 untuk grafik 5.b.
Rata-rata frekuensi sudut 𝜔2 dari kedua grafik diperoleh sebesar
𝜔2
̅̅̅̅ = (10,175 ± 0,003) 𝑟𝑎𝑑/𝑠. Untuk mencari konstanta pegas,
frekuensi sudut 𝜔̅̅̅̅2 dimasukkan pada persamaan (2.23), dengan massa
benda 𝑚 = (0,2562 ± 0,0001) 𝑘𝑔. Konstanta pegas yang dihitung
melalui mode asimetris sebesar 𝑘2 = (8,842 ± 0,004) 𝑁 𝑚⁄ . Sementara
itu, periode 𝑇2 diperoleh dengan memasukkan 𝜔̅̅̅̅2 pada persamaan (2.24)
yang menghasilkan periode sebesar 𝑇2 = (0,6172 ± 0,0002)𝑠. Cara
perhitungan hasil dan ralat ditunjukkan pada lampiran.
A.4 Osilasi Gandeng Mode Gabungan
Osilasi gandeng yang diamati terdiri dari dua benda dengan tiga
pegas yang berosilasi secara horizontal. Pada mode gabungan, benda
berosilasi dengan dua frekuensi normal. Benda berosilasi pada mode
gabungan apabila simpangan awal kedua benda 𝑥1 = 0 dan 𝑥2 = 𝑥.
Benda 1 dan 2 disimpangkan dengan simpangan awal yang
berbeda besarnya. Benda 1 tidak disimpangkan (𝑥1 = 0 𝑐𝑚) sedangkan
dilepaskan bersamaan sehingga benda kemudian berosilasi. Smartphone
merekam percepatan benda seperti pada grafik 6.
Grafik 6. (a) Percepatan fungsi waktu saat mode gabungan pada benda 1. (b) Percepatan fungsi waktu saat mode gabungan pada benda 2. Simpangan awal kedua benda x1=0 cm dan x2=5 cm dan dan massa benda m1=m2= (0,2562 ± 0,0001) 𝑘𝑔.
Grafik 6 merupakan percepatan fungsi waktu dari kedua benda
dengan massa 𝑚 = (0,2562 ± 0,0001) 𝑘𝑔 yang berosilasi pada mode
gabungan. Titik-titik data mengikuti garis fiting persamaan yang berbentuk sinusoida. Sinusoida yang dimaksud tidak seperti pada mode
simetris dan asimetris. Setelah suatu puncak atau bukit terbentuk dengan
amplitudo A kemudian terbentuk puncak atau bukit baru dengan
amplitudo yang besarnya berbeda. Amplitudo dari puncak dan bukit terus
(a)
berubah-ubah dari yang sebelumnya. Pola grafik antara benda 1 dan 2
tidak simetris.
Grafik 6.a difit menggunakan persamaan (2.27) dan grafik 6.b
difit menggunakan persamaan (2.28). Dari fiting ini, frekuensi sudut 𝜔31 dan 𝜔32 diperoleh pada masing-masing grafik. Pada grafik 6.a, frekuensi
sudut sebesar 𝜔31= (5,67 ± 0,01) 𝑟𝑎𝑑/𝑠 dan 𝜔32 = (10,100 ±
0,003) 𝑟𝑎𝑑/𝑠. Pada grafik 6.b, frekuensi sudut sebesar 𝜔31=
(5,66 ± 0,01) 𝑟𝑎𝑑/𝑠 dan 𝜔32 = (10,110 ± 0,003) 𝑟𝑎𝑑/𝑠.
Rata-rata frekuensi sudut 𝜔31 dan 𝜔32 dari kedua grafik diperoleh
sebesar 𝜔̅̅̅̅̅ = (5,66 ± 0,01) 𝑟𝑎𝑑/𝑠31 dan 𝜔̅̅̅̅̅ = (10,105 ±32
0,003) 𝑟𝑎𝑑/𝑠. Untuk mencari konstanta pegas, frekuensi sudut
dimasukkan pada persamaan (2.20) untuk 𝜔̅̅̅̅̅31 dan persamaan (2.23)
untuk 𝜔̅̅̅̅̅32, dengan massa benda 𝑚 = (0,2562 ± 0,0001) 𝑘𝑔. Dari
perhitungan tersebut, konstanta pegas diperoleh sebesar 𝑘31= (8,22 ±
0,02) 𝑟𝑎𝑑/𝑠 dan 𝑘32 = (8,720 ± 0,004) 𝑟𝑎𝑑/𝑠. Konstanta pegas yang
dihitung melalui mode gabungan dapat diperoleh dari rata-rata 𝑘31 dan
𝑘32, yaitu sebesar 𝑘3 = (8,47 ± 0,01) 𝑁 𝑚⁄ . Sementara itu, periode 𝑇31
dan 𝑇32 diperoleh dengan memasukkan 𝜔̅̅̅̅̅31 pada persamaan (2.21) dan
dan 𝜔̅̅̅̅̅32 pada persamaan (2.24) yang menghasilkan periode sebesar
𝑇31 = (1,108 ± 0,002)𝑠 dan 𝑇32= (0,6215 ± 0,0002)𝑠. Cara
B. Pembahasan
B.1 Menghitung Nilai Konstanta Pegas Menggunakan Sistem Osilasi Pegas-massa
Sistem osilasi pegas-massa digunakan untuk menghitung
konstanta pegas. Pegas yang akan diukur konstantanya digantungkan
pada statif. Sebuah smartphone digantungkan pada ujung bebas pegas.
Smartphone diberikan simpangan dan kemudian dilepaskan sehingga
akhirnya berosilasi.
Selain sebagai beban, smartphone berperan sebagai sensor
percepatan. Smartphone atau ponsel pintar berbeda dengan ponsel biasa.
Smartphone dilengkapi sensor percepatan di dalamnya. Dalam penelitian
ini, sensor dimanfaatkan untuk mendeteksi percepatan benda saat osilasi.
Percepatan smartphone yang dialami saat osilasi dideteksi dan
diukur oleh sensor percepatan. Sensor mampu mendeteksi percepatan di
tiga sumbu smartphone. Sumbu X meliputi bagian kanan-kiri dari
smartphone. Sedangkan sumbu Y meliputi bagian atas-bawah dan sumbu
Z meliputi depan-belakang.
Pada saat percobaan osilasi pegas-massa peralatan diset seperti
pada gambar 3. Smartphone diset tegak sehingga ketika berosilasi sensor
mendeteksi percepatan sumbu Y (gerakan osilasi naik-turun). Percepatan
Sebuah aplikasi digunakan untuk merekam percepatan ketika
osilasi. Aplikasi ini bernama Accelerometer Monitor version 1.5 dan
dapat diunduh di Play Store dengan mudah. Aplikasi dijalankan dengan
cara menekan tombol “start”. Tombol “stop” ditekan untuk menghentikan aplikasi. Hasil rekaman berisi percepatan yang dideteksi
dalam sumbu X, Y dan Z disertai waktu osilasi. Data berupa angka-angka
yang ditampilkan dalam bentuk tabel.
Hasil rekaman tersebut ditampilkan dalam bentuk grafik dengan
cara menyalin data ke software LoggerPro. Grafik yang akan ditampilkan
adalah percepatan fungsi waktu benda dari benda yang berosilasi.
Grafik 1 merupakan percepatan fungsi waktu pada osilasi
pegas-massa menggunakan pegas nomor 1. Grafik yang dianalisa adalah bagian
grafik yang baik. Bagian grafik yang buruk seperti ketika percepatan
belum terdeteksi dan amplitudo yang berkurang karena mengalami
redaman. Bagian grafik yang diambil yaitu selang 8 sekon untuk
kemudian dianalisa. Selama selang ini, terdapat sekitar 380 titik data
percepatan benda.
Grafik 1 kemudian dianalisa dengan fittng persamaan (2.6) pada
grafik. Konstanta pegas nomor 1 diperoleh melalui persamaan (2.5)
Osilasi pegas-massa juga dilakukan menggunakan pegas nomor 2
dan 3. Grafik 2 dan 3 menampilkan percepatan fungsi waktu dari osilasi
yang menggunakan kedua pegas tersebut. Konstanta pegas keduanya
diperoleh melalui persamaan (2.5) dengan frekuensi sudut 𝜔 yang
diketahui dari fiting masing-masing grafik. Contoh perhitungan konstanta pegas dapat dilihat di lampiran.
Hasil eksperimen menunjukkan konstanta pegas pada nomor 1, 2
dan 3 adalah 𝑘01= (9,72 ± 0,01) 𝑁 𝑚⁄ , 𝑘02 = (9,095 ± 0,009) 𝑁 𝑚⁄
dan 𝑘03= (8,717 ± 0,009) 𝑁 𝑚⁄ . Untuk menyatakan konstanta secara
keseluruhan, ketiga konstanta tersebut dirata-rata. Konstanta keseluruhan
pegas tersebut sebesar 𝑘0 = (9,177 ± 0,009) 𝑁 𝑚⁄ . Hasil ini
menyatakan nilai konstanta pegas yang diperoleh eksperimen osilasi
pegas-massa.
B.2 Seting Peralatan Osilasi Gandeng
Pada penelitian ini, sistem osilasi gandeng terdiri dari benda dan
pegas yang disusun secara horizontal. Ketiga pegas diset sesuai dengan
gambar 9 di atas permukaan air track. Permukaan air track diatur agar datar dengan cara meletakkan water pass pada setiap bagian permukaan. Kemudian ketiga pegas dan kedua benda disusun satu garis lurus
track. Posisi pegas diatur oleh pengait pada air track hingga glider dan benda terlihat lurus dari samping dan depan.
Keadaan awal ketiga pegas diatur agar tidak terlalu kendur atau
terlalu kencang. Jika set ketiga pegas terlalu kendur maka benda akan
sulit disimpangkan. Selain itu, benda yang berosilasi bisa menabrak
pegas dan gerak osilasi akan berhenti. Jika set ketiga pegas terlalu
kencang maka pegas bisa rusak saat disimpangkan karena melebihi
pertambahan panjang maksimumnya. Keadaan awal ketiga pegas diatur
dengan menggeser pengait yang bisa digeser pada air track. Osilasi paling baik dilakukan pada panjang pegas 20 cm. Pada keadaan pegas
tersebut, simpangan awal benda bisa dilakukan sejauh 5-6 cm. Panjang
pegas yang digunakan sebesar 13 cm sehingga ketika disimpangkan
pegas tidak melewati panjang maksimalnya. Selain itu, benda yang
berosilasi tidak akan menabrak pegas.
Selain itu, ketiga pegas dipasang cukup tinggi dari permukaan air track. Ketika benda disimpangkan dengan simpangan besar, pegas yang mengalami pengurangan panjang akan mengendur karena pengaruh
gravitasi. Oleh karena itu pegas dipasang cukup tinggi agar saat osilasi
pegas tidak bergesekan dengan permukaan air track.
Sebelum eksperimen, kedua smartphone terlebih dahulu diinstal
software Accelerometer Monitor version 1.5. Software bisa diunduh dari
selesai software langsung terinstal secara otomatis. Saat software dibuka,
software menampilkan percepatan dalam bentuk grafik. Software
dijalankan secara bersamaan dengan menekan tombol “start”.
B.3 Osilasi Gandeng Mode Normal Simetris
Pada osilasi gandeng mode ini, simpangan awal kedua benda
searah dan sama besar. Kedua benda disimpangkan ke arah kanan dengan
simpangan yang sama besar. Setelah kedua benda dilepaskan bersamaan,
benda 1 mendapat gaya pemulih ke arah kiri dari pegas 1 sehingga benda
bergerak ke kiri. Karena kedua benda dihubungkan dengan pegas
penggandeng maka secara bersamaan benda 2 ikut bergerak ke kiri.
Setelah melewati titik seimbangnya benda 2 mengalami gaya pemulih ke
arah kanan dari pegas 3. Benda 2 mencapai simpangan maksimal
kemudian arah gerak benda berbalik bersamaan dengan benda 1.
Peristiwa ini akan berulang terus menerus.
Osilasi pada mode ini memiliki kekhasan yaitu pegas
penggandeng yang ada di tengah tidak mengalami perubahan panjang.
Hal ini dikarenakan pola gerak kedua benda yang selalu beriringan.
Pegas penggandeng ini tidak memberikan gaya pemulih yang akan
mempengaruhi gerak glider. Kedua pegas samping yang akan terus
menjaga benda berosilasi.
Pada awal penelitian, osilasi mode simetris dilakukan dengan
grafik percepatan yang direkam sensor percepatan smartphone terlihat
kasar. Tampilan grafik diperbaiki dengan cara memperbesar simpangan
awal benda menjadi 𝑥01= 5 𝑐𝑚 dan 𝑥02= 5 𝑐𝑚.
Secara teori benda berosilasi percepatannya berubah terhadap
waktu. Karena gerak benda yang beriringan, pada mode simetris
perubahan percepatan kedua benda selalu sama. Besarnya percepatan
benda terhadap waktu dinyatakan pada persamaan (2.29) dan (2.30).
Nilai percepatan dari kedua persamaan tersebut selalu sama.
Dalam eksperimen hal ini dibuktikan dari nilai percepatan kedua
benda yang dapat dilihat pada grafik 4. Saat benda 1 mengalami
percepatan maksimal maka pada saat itu juga benda 2 mengalami
percepatan maksimal yang besarnya sama. Hal yang sama saat benda 1
mengalami percepatan minimal maka pada saat itu juga benda 2
mengalami percepatan minimal yang besarnya sama. Kedua benda selalu
memiliki percepatan yang sama. Bentuk grafik yang sinusoida sesuai
dengan bentuk persamaan (2.29) dan (2.30) mode simetris yang
merupakan fungsi sinus. Hal ini menunjukkan sensor smartphone mampu
menunjukkan percepatan benda yang berosilasi pada mode simetris
dengan baik.
Kemudian grafik 4.a difit menggunakan persamaan (2.29) dan
diperoleh pada kedua grafik tersebut. Rata-rata frekuensi sudut 𝜔1 kedua
grafik diperoleh sebesar 𝜔̅̅̅̅ = (5,690 ± 0,006) 𝑟𝑎𝑑/𝑠1 .
Melalui mode normal simetris nilai konstanta pegas dapat dihitung
dengan cara mensubtitusi 𝜔̅̅̅̅1 dan 𝑚 ke dalam persamaan (2.20). Hasil
perhitungan menunjukkan konstanta pegas sebesar 𝑘1 = (8,29 ±
0,01) 𝑁/𝑚. Pada osilasi pegas-massa, pengukuran konstanta pegas
diperoleh sebesar 𝑘0 = (9,177 ± 0,009) 𝑁 𝑚⁄ . Hasil pengukuran
konstanta mode simetris memiliki perbedaan sebesar 9,7% dibandingkan
dengan hasil pengukuran metode osilasi pegas-massa. Kemiripan ini
menunjukkan bahwa metode ini bisa digunakan untuk menghitung
konstanta pegas. Cara perhitungan persentase perbedaan ditunjukkan
pada lampiran.
Hasil pengukuran konstanta pegas pada mode ini memiliki
persentase perbedaan yang cukup jauh dibandingkan dengan pengukuran
oleh osilasi pegas-massa. Persentase perbedaan pengukuran sebesar
9,7%. Hal ini mungkin disebabkan oleh keterbatasan penelitian. Pada
eksperimen ini, ketiga yang digunakan tidak memiliki konstanta yang
sama persis. Selisih konstanta paling besar yaitu antara pegas nomor 1
dengan nomor 3 sebesar 1,003 𝑁 𝑚⁄ .
Telah ditunjukkan bahwa hasil eksperimen sesuai dengan teori dan
memiliki kemiripan pengukuran konstanta dengan metode lain. Hal ini
mempelajari osilasi gandeng mode simetris. Smartphone mampu
menampilkan percepatan benda yang berosilasi baik dan cara
menganalisa data yang mudah. Metode ini dapat digunakan untuk
mengenalkan gerak harmonik pada siswa.
B.4 Osilasi Gandeng Mode Normal Asimetris
Sistem osilasi gandeng yang dipelajari terdiri dari benda dan pegas
yang disusun secara horizontal. Pada osilasi gandeng mode ini,
simpangan awal kedua benda berlawanan arah dan sama besar. Benda 1
disimpangkan ke arah kiri sedangkan benda 2 ke arah kanan dengan
simpangan yang sama besar. Saat kedua benda dilepaskan secara
bersamaan, benda 1 mendapat gaya pemulih ke arah kanan dari pegas 2
sehingga bergerak ke kanan. Di saat yang bersamaan benda 2 mendapat
gaya pemulih ke kiri dari pegas 2 sehingga bergerak ke kiri.
Mode ini memiliki kekhasan yaitu pegas penggandeng yang ada di
tengah mengalami perubahan panjang dari dua arah. Pegas 2 sebagai
penggandeng memberikan gaya pada kedua benda agar bergerak secara
bersamaan ke pusat sistem. Pegas 2 memiliki gaya pemulih karena
mengalami perubahan panjang dari dua arah secara bersamaan saat
simpangan awal. Sementara itu, kedua pegas samping memberikan gaya
pemulih yang arahnya juga ke pusat sistem karena pegas ini mengalami
Benda 1 dan 2 yang bergerak ke pusat sistem dan telah melewati
titik seimbangnya akan mengalami gaya pemulih yang arahnya menjauhi
pusat sistem. Gaya pemulih ini muncul karena terjadi pertambahan
panjang pada kedua pegas samping. Benda 1 dan 2 kemudian mencapai
simpangan maksimal dan akhirnya berbalik arah geraknya. Peristiwa ini
akan berulang terus menerus.
Pada awal penelitian, osilasi mode simetris dilakukan dengan
simpangan awal 𝑥01 = −2 𝑐𝑚 dan 𝑥02= 2 𝑐𝑚. Pada simpangan awal
ini, grafik percepatan yang direkam sensor percepatan smartphone
terlihat kasar. Tampilan grafik diperbaiki dengan cara memperbesar
simpangan awal benda menjadi 𝑥01 = −3 𝑐𝑚 dan 𝑥02 = 3 𝑐𝑚.
Secara teori benda berosilasi percepatannya berubah terhadap
waktu. Perubahan percepatan benda selalu sama namun gerak benda
berlawanan. Besarnya percepatan benda terhadap waktu dinyatakan pada
persamaan (2.31) dan (2.32). Nilai percepatan kedua persamaan nilainya
selalu sama tetapi berlawanan arahnya.
Dalam eksperimen hal ini dibuktikan dari nilai percepatan kedua
benda yang dapat dilihat pada grafik 5. Benda 1 mengalami percepatan
maksimal. Pada saat itu benda 2 mengalami percepatan minimal yang
besarnya sama namun negatif. Hal yang sama ketika benda 1 mengalami
percepatan minimal. Pada saat itu benda 2 mengalami percepatan
memiliki percepatan yang sama besar tetapi berlawanan arahnya. Bentuk
grafik yang sinusoida sesuai dengan bentuk persamaan (2.31) dan (2.32)
mode asimetris yang merupakan fungsi sinus. Hal ini menunjukkan
bahwa metode ini dapat menampilkan percepatan benda yang berosilasi
pada mode asimetris dengan baik.
Kemudian grafik 5.a difit menggunakan persamaan (2.31) dan
grafik 5.b difit menggunakan persamaan (2.32). Dari fiting grafik, frekuensi sudut 𝜔2 kedua grafik diketahui. Rata-rata frekuensi sudut 𝜔2
kedua grafik diperoleh sebesar 𝜔̅̅̅̅ = (10,175 ± 0,003) 𝑟𝑎𝑑/𝑠2 .
Melalui mode normal asimetris konstanta pegas dapat diukur.
Hasil perhitungan menunjukkan konstanta pegas sebesar 𝑘2 = (8,842 ±
0,004) 𝑁/𝑚. Pada osilasi pegas-massa, pengukuran konstanta pegas
diperoleh sebesar 𝑘0 = (9,177 ± 0,009) 𝑁 𝑚⁄ . Perbandingan antara
hasil pengukuran konstanta mode normal asimetris dibandingkan dengan
metode osilasi pegas-massa memiliki perbedaan sebesar 3,6%.
Kemiripan ini menunjukkan bahwa metode ini bisa digunakan untuk
menghitung konstanta pegas. Cara perhitungan persentase perbedaan
ditunjukkan pada lampiran.
Telah dibahas bahwa hasil eksperimen sesuai dengan teori dan
memiliki kemiripan pengukuran konstanta dengan metode lain. Hal ini
menunjukkan bahwa sensor smartphone bisa digunakan untuk
data yang mudah, metode ini dapat digunakan untuk mengenalkan materi
osilasi mode asimetris pada siswa.
B.5 Osilasi Gandeng Mode Gabungan
Pada osilasi mode ini, kedua benda disimpangkan dengan jarak
yang berbeda. Misalnya, benda 1 tidak disimpangkan sedangkan benda 2
disimpangkan ke arah kanan. Saat kedua benda dilepaskan secara
bersamaan, benda 1 dan 2 mendapat gaya pemulih ke pusat pegas
penggandeng karena pertambahan pegas pada pegas ini lebih besar dari
kedua pegas samping. Namun, kedua pegas tidak bergerak ke pusat
sistem. Pegas samping kiri yang lebih panjang dari pegas samping kanan
akan menarik kedua benda ke arah kiri. Osilasi ini akan terus terjadi
dengan berbagai kombinasi gaya pemulih pada ketiga pegas. Dapat
dilihat bahwa osilasi pada mode ini pola gerak benda tidak simetris
dibandingkan mode osilasi simetris dan asimetris.
Pada awal penelitian, osilasi mode gabungan dilakukan dengan
simpangan awal 𝑥01 = 0 𝑐𝑚 dan 𝑥02 = 3 𝑐𝑚. Pada simpangan awal ini,
grafik percepatan yang direkam sensor percepatan smartphone terlihat
kasar. Tampilan grafik diperbaiki dengan cara memperbesar simpangan
awal benda menjadi 𝑥01= 0 𝑐𝑚 dan 𝑥02= 5 𝑐𝑚.
Pada mode simetris dan asimetris benda hanya berosilasi pada satu
frekuensi sudut yaitu 𝜔1 atau 𝜔2. Pada mode gabungan benda berosilasi
merepresentasikan percepatan kedua benda pada osilasi ini. Persamaan
percepatan fungsi waktu berbentuk fungsi sinus.
Pada persamaan (2.27) dan (2.28), ketika 𝑠𝑖𝑛(𝜔1𝑡 + 𝜃1) bernilai
nol, maka kedua benda bergerak pada frekuensi sudut 𝜔2. Sementara itu,
ketika 𝑠𝑖𝑛(𝜔2𝑡 + 𝜃2) bernilai nol, maka kedua benda bergerak pada 𝜔1.
Suatu saat kedua benda akan bergerak dengan 2 frekuensi dan suatu saat
benda bergerak dengan satu frekuensi 𝜔1 atau 𝜔2.
Dalam mode gabungan ini, frekuensi sudut 𝜔31 diperoleh dari
fiting grafik 6.a sebesar 𝜔31= (5,67 ± 0,01) 𝑟𝑎𝑑/𝑠 dan fiting grafik 6.b sebesar 𝜔31= (5,66 ± 0,01) 𝑟𝑎𝑑/𝑠. Rata-rata frekuensi sudut 𝜔31
diperoleh sebesar 𝜔̅̅̅̅̅ = (5,66 ± 0,01) 𝑟𝑎𝑑/𝑠31 . Pada eksperimen mode
normal simetris, rata-rata 𝜔1 diperoleh sebesar 𝜔̅̅̅̅ = (5,690 ±1
0,006) 𝑟𝑎𝑑/𝑠. Nilai frekuensi sudut 1 yang diperoleh mode gabungan
memiliki kemiripan dengan frekuensi sudut 1 yang diperoleh mode
simetris. Kemiripan hasil pengukuran menunjukkan bahwa pada mode
gabungan benda bergerak dengan frekuensi 𝜔1 seperti pada mode
simetris.
Selain itu dalam mode gabungan, frekuensi sudut 𝜔2 diperoleh
dari fiting grafik 6.a sebesar 𝜔32= (10,100 ± 0,003) 𝑟𝑎𝑑/𝑠 dan dari fiting grafik 6.b sebesar 𝜔32= (10,110 ± 0,003) 𝑟𝑎𝑑/𝑠. Rata-rata frekuensi sudut 𝜔32 dari kedua grafik diperoleh sebesar 𝜔̅̅̅̅̅ =32
rata-rata frekuensi sudut 𝜔2 dari kedua grafik diperoleh sebesar 𝜔̅̅̅̅ =2
(10,175 ± 0,003) 𝑟𝑎𝑑/𝑠. Hasil frekuensi sudut 2 yang diperoleh mode
gabungan memiliki kemiripan dengan frekuensi sudut 2 yang diperoleh
dari mode asimetris. Kemiripan hasil pengukuran menunjukkan bahwa
pada mode gabungan benda bergerak dengan frekuensi 𝜔2 seperti pada
mode asimetris.
Dari penjelasan di atas, dapat dilihat bahwa pada mode gabungan,
benda bergerak tidak hanya pada frekuensi sudut 𝜔1 tetapi juga pada 𝜔2.
Hal ini dilihat dari nilai 𝜔1 mode gabungan yang mirip dengan 𝜔1 mode
normal simetris dan nilai 𝜔2 mode gabungan yang mirip dengan 𝜔2
mode normal asimetris. Hal ini sesuai dengan teori bahwa pada mode
gabungan benda berosilasi dengan dua frekuensi berbeda yaitu 𝜔1 dan
𝜔2. Mode ini menggabungkan frekuensi sudut kedua mode normal
simetris dan asimetris.
Data percepatan diperoleh pada kedua benda yang berosilasi mode
gabungan dan ditampilkan pada grafik 6. Dapat dilihat bahwa titik-titik
data kedua grafik mengikuti garis fiting persamaan. Grafik berbentuk sinusoida dan amplitudonya berubah-ubah. Bentuk dari grafik yang
diperoleh sesuai dengan teori pada mode gabungan. Hal ini menunjukkan
bahwa metode ini dapat menampilkan percepatan benda yang berosilasi