BAB III
PERANCANGAN SISTEM
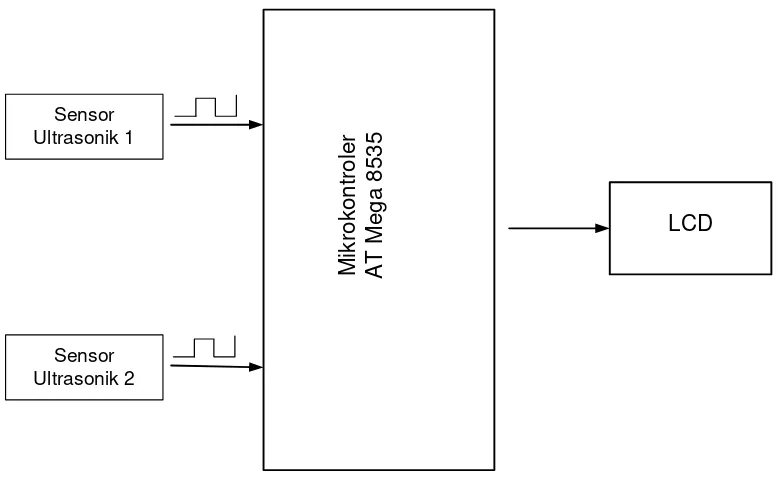
3.1 Diagram Blok
Air ditampung pada wadah yang nantinya akan dialirkan dengan menggunakan pompa. Pompa akan menglirkan air melalui saluran penghubung yang dibuat sedemikian rupa sehingga air dapat dialirkan ke tempat penampungan air yang lain. Sensor ultrasonic dibuatkan di saluran penghubung antara kedua wadah. Sensor ultrasonic yang pertama akan mengukur kecepatan air sedangkan sensor ultrasonic yang kedua akan mengukur debit air. Hasil dari pengukuran sensor ultrasonic yang pertama dan yang kedua akan ditampilkan ke layar LCD. Adapun diagram blok rangkaian sehingga rangkaian dapat berfungsi dapat dilihat pada gambar berikut :
Gambar 3.1 Diagram Blok Rangkaian
a. Wadah penampungan 1 di isi dengan air yang akan diukur kecepatan dan
b. Setelah wadah terisi dengan air maka dihidupkan pompa air agar air dapat mengalir melalui saluran penghubung ke penampungan air yang ke 2.
c. Setelah air melalui saluaran penghubung maka sensor 1 dan 2 akan aktif
dan segera melakukan pengukuran kecepatan dari air dan akan ditampilkan di layar LCD
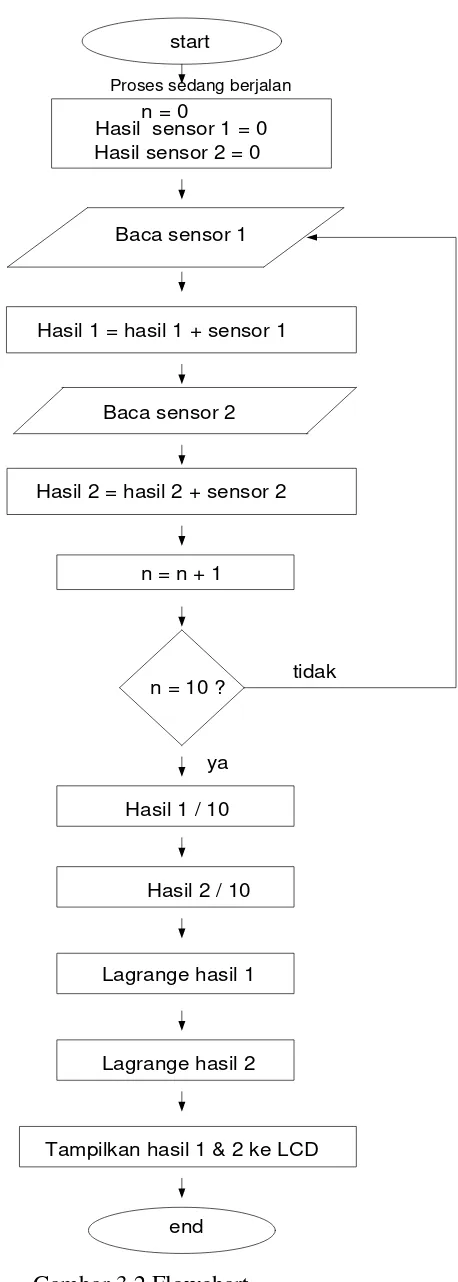
Tampilkan hasil 1 & 2 ke LCD
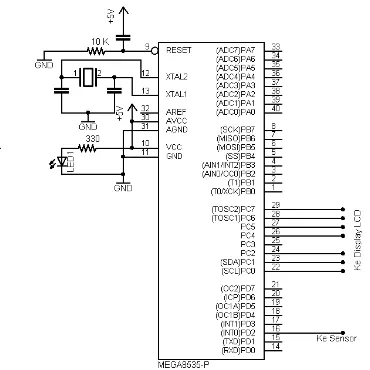
Rangkaian ini berfungsi sebagai pusat kendali dari seluruh sistem yang ada. Kompoen utama dari rangkaian ini adalah IC mikrokontroler ATMega8535. Pada IC inilah semua program diisikan, sehingga rangkaian dapat berjalan sesuai
dengan yang dikehendaki. Rangkaian mikrokontroler ditunjukkan pada gambar berikut ini.
3.3 Rangkaian Catu Daya
Rangkaian ini berfungsi untuk mensuplai tegangan ke seluruh rangkaian yang ada. Rangkaian catu daya yang dibuat terdiri dari 2 tegangan keluaran, yaitu
5 Volt dan 12 Volt. Keluaran 5 Volt digunakan untuk mensupplai tegangan ke seluruh rangkaian, sedangkan keluaran 12 Volt digunakan untuk mensuplai tegangan pada motor stepper saja. Berikut ini adalah skema rangkaian catu daya yang dibuat:
Gambar 3.4 Skematik Rangkaian Catu Daya
Transformator yang digunakan adalah transformator CT Stepdown yang akan menurunkan tegangan 220 Volt AC menjadi 12 Volt AC. Kemudian, tegangan 12 Volt AC ini disearahkan oleh 2 buah dioda 1N5900 sehingga menjadi
12 Volt DC. Kemudian tegangan ini diratakan menggunakan kapasitor 3300 μF.
Tegangan yang sudah diratakan ini kemudian di regulasi oleh LM7805. Hal ini bertujuan agar tegangan yang dihasilkan oleh catu daya ini tetap pada 5 Volt walaupun terjadi perubahan tegangan pada bagian input tegangan dari catu daya.
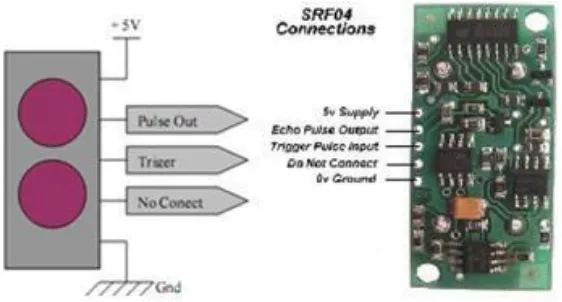
3.4 Rangkaian Sensor Ultrasonik jenis SFR04
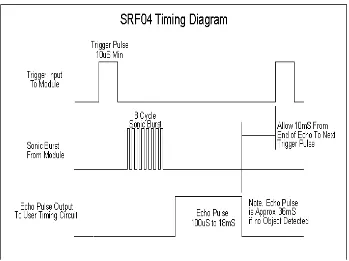
Sensor Devantech SRF-04 bekerja dengan cara memancarkan sinyal ultrasonik sesaat dan menghasilkan pulsa output yang sesuai dengan waktu pantul sinyal ultrasonik sesaat kembali menuju sensor. Dengan mengukur lebar pulsa pantulan tersebut jarak target didepan sensor dapat diketahui.
Gambar 3.5 Sensor Ultrasonik SRF04 dan koneksinya
Dengan 2 buah pin kontrol, antara lain sebuah pin input triger dan sebuah pin
output data. Untuk mengaktifkan sensor maka modul diberi triger pulsa maka sensor akan mengeluarkan sinyal pwm dan duty cycle tersebut sebagai jarak objek dengan sensor .
Mikrokontroller memberikan sinyal pulsa high pada pin triger pulse input dari sensor untuk mengaktifkan sensor ultrasonik. Untuk menghitung lebar
PWM mengunakan timer 0. Pin echo pulse output terhubung dengan pin-pin pada mikrokontroler. Ketika pin echo pulse output high maka timer 0 aktif dan ketika pin echo kembali bernilai low maka timer 0 dimatikan dan data TCNT0 diambil sebagai data jarak.
Spesifikasi dari sensor SRF04 ini adalah sebagai berikut:
- Pulsa Echo : Sinyal level TTL Positif, Lebar berbanding proporsional dengan jarak yang dideteksi
Untuk dapat memhami cara kerja dari sensor SRF04 ini perhatikan timming dari pulsa masukan dan keluaran sensor berikut ini:
Gambar 3.6 Timing Diagram SFR04
3. 5 Rangkaian Display LCD
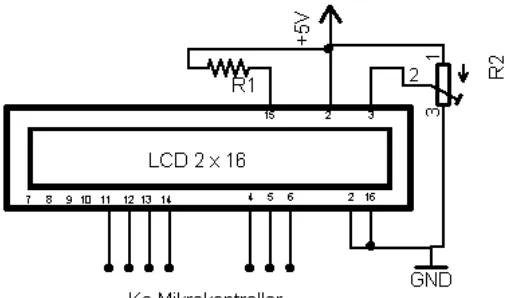
Rangkaian display LCD ini berfungsi untuk menampilkan status relay (ON atau OFF). Rangkaian display LCD ditunjukkan pada gambar 3.5 berikut ini :
Gambar 3.7 Rangkaian Display LCD
LCD terdiri dari sejumlah memory yang digunakan untuk display. Semua teks yang kita tuliskan ke LCD adalah disimpan didalam memory ini, dan LCD secara berturutan membaca memory ini untuk menampilkan teks ke LCD itu sendiri.
Pada peta memori tersebut, daerah yang berwarna biru ( 00 s/d 0F dan 40 s/d 4F ) adalah display yang tampak. Sebagaimanan yang anda lihat, jumlahnya sebanyak 16 karakter per baris dengan dua baris. Angka pada setiap kotak adalah alamat memori yang bersesuaian dengan posisi dari layar. Demikianlah karakter pertama di sudut kiri atas adalah menempati alamah 00h.
Posisi karakter berikutnya adalah alamat 01h dan seterusnya.
sebuah perintah ke LCD untuk mangatur letak posisi kursor pada baris dan kolom tertentu. Instruksi Set Posisi Kursor adalah 80h. Untuk ini kita perlu menambahkan alamat lokasi dimana kita berharap untuk menempatkan kursor.Sebagai contoh, kita ingin menampilkan kata ”World” pada baris ke dua pada posisi kolom ke sepuluh.
Sesuai peta memori, posisi karakter pada kolom 11 dari baris ke dua, mempunyai alamat 4Ah, sehingga sebelum kita tulis kata ”World” pada LCD, kita harus mengirim instruksi set posisi kursor, dan perintah untuk instruksi ini adalah 80h ditambah dengan alamat 80h+4Ah =0Cah. Sehingga dengan mengirim perintah Cah ke LCD, akan menempatkan kursor pada baris kedua dan kolom ke 11 dari DDRAM.
Set Alamat Memori DDRAM
RS R/W DB7 DB6 DB5 DB4 DB3 DB2 DB1 DB0
0 0 1 A A A A A A A
Catatan:
BAB IV
PENGUJIAN SISTEM
Pada bab ini, akan dibahas pengujuan alat dari mulai dari pengujian alat permodul sampai pengujian alat secara keseluruhan. Pengujian tersebut akan dilakukan secara bertahap dengan tahap sebagai berikut:
a. Pengujuan Minimum Sistem
b. Pengujuan Sistem Secara Keseluruhan
4.1 Pengujian Minimum Sistem
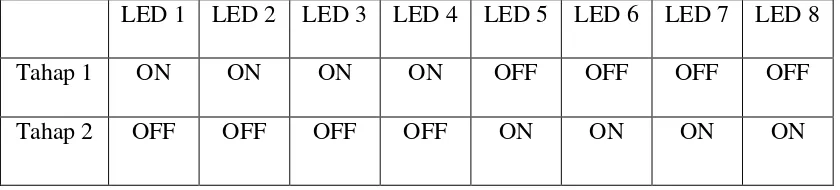
Pada pengujian system minimum system ini dilakukan dengan percobaan yang sifatnya sederhana tetapi dapat menunjukkan bekerja tidaknya minimum system tersebut percobaan tersebut adalah menghidupkan beberapa buah LED secara bergantian. Percobaan ini dilakukan pada I/O port (Port A). Untuk menghidupkan LED tersebut digunakan program sebagai berikut:
LED 1 LED 2 LED 3 LED 4 LED 5 LED 6 LED 7 LED 8
Tahap 1 ON ON ON ON OFF OFF OFF OFF
Tahap 2 OFF OFF OFF OFF ON ON ON ON
Tabel 4.1 Pengujian sistem minimum pada LED
4.2 Pengujian LCD
4.3 Pengujian Alat
Adapun data yang diperoleh dari pengujian alat yang telah dibuat adalah :
a. Dengan 2 pompa
Tabel 4.2 Hasil pengukuran debit dan kecepatan air dengan 2 pompa
No debit (m3/
Penghitungan debit dan kecepatan secara teori.
Dimana ; waktu yang diperlukan untuk mengisi sebanyak 1 liter air adalah 11 detik, sehingga:
Lebar penampang bawah adalah 3 cm dan saat air melewati penampang, tinggi air adalah 3 cm
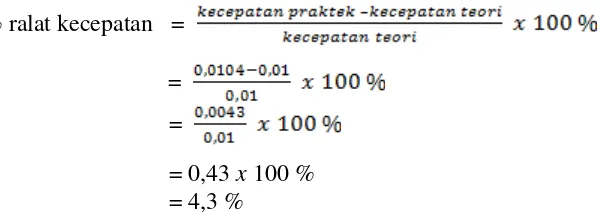
% ralat kecepatan =
Tabel 4.3 Hasil pengukuran debit dan kecepatan air dengan 3 pompa
15 0,000135 0,117
rata-rata 0,00014435 0,12425
Penghitungan debit dan kecepatan secara teori
Dimana ; waktu yang diperlukan untuk mengisi sebanyak 1 liter air adalah 7 detik,
sehingga:
Lebar penampang bawah adalah 3 cm dan saat air melewati penampang, tinggi air adalah 3,8 cm.
% ralat debit =
=
=
= 0,031 x 100 % = 3,1 %
% ralat kecepatan =
=
=
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan
1. Pengukuran debit dan kecepatan aliran air dapat dialakukan dengan memanfaatkan sensor ultrasonic berbasis Mikrokontroller 8535 2. Saat kecepatan air meningkat, maka waktu yang diperlukan oleh sinyal
ultrasonic untuk merambat dari pemancar ke penerima sensor juga
akan semakin cepat.
3. Adapun ralat yang dihasilkan dari pengukuran adalah: a. Untuk 2 pompa
Pada perancangan dan realisasi alat ini masih mempunyai banyak kekurangan sehingga perlu pengembangan lebih lanjut. Adapun saran-saran yang diharapkan pada penelitian selanjutnya adalah :
1. Sebaiknya pembacaan sensor dilakukan pada saat air tidak bergelombang karena akan dapat mempengaruhi pembacaan sensor. 2. Sebaiknya sensor diletakkan cukup jauh dari tempat jatuhnya air,
sehingga ketika air sampai ke penerima sensor dan gelombang air
cenderung stabil.