commit to user
6 BAB II LANDASAN TEORI
2.1 Tinjauan Pustaka
Pico Hydro merupakan salah satu jenis pembangkit listrik yang menghasilkan tidak lebih dari 5 kW dan hanya memerlukan head rendah. Pada Pico Hydro pemilihan turbin (Ramos dkk., 2009; Williamson et al., 2014) sangat mempengaruhi hasil dari perubahan energi potensial menjadi energi mekanik berdasarkan ketinggian (h) dan debit (Q). Dari berbagai macam jenis, turbin yang diaplikasikan pada pico hydro antara lain propeller (Ho-Yan, 2012; Adhikari dkk., 2013; Patel dkk., 2014), Pump As Turbine (Tasneem dkk., 2014), Croos Flow (Othman dkk., 2011; Razak dkk., 2011), dan lain-lain.
Dalam menentukan rasio perbandingan transmisi tidak hanya berdasarkan kecepatan putar turbin dan generator, namun juga berdasarkan torsi turbin dan generator (Sholihah, 2011). Beberapa percobaan penggunaan trasmisi pada penelitian pembangkit listrik dilakukan oleh Razak dkk. (2011) mengaplikasikan sprocket pada pico hydro crossflow dengan beberapa variasi perbandingan transmisi, Sumiati dkk. (2014) mengaplikasikan belt pulley dengan perbandingan transmisi 1:5 pada rancang bangun micro turbin angin.
Terdapat beberapa hal yang harus diperhatikan menguji generator melalui mekanisme pembangkit untuk menghasilkan listrik, yaitu putaran poros (rpm), dan beban yang digunakan. Mustofa dkk. (2014) menguji perancangan generator hubungan beban dengan tegangan, dan beban dengan arus. Sholihah dkk. (2011) menguji prototype mikrohidro dengan variasi beban lampu menunjukkan hasil semakin banyak lampu yang digunakan semakin pelan putaran poros (rpm) pada sistem mikrohirdo semakin turun.
Untuk memprediksi dan menganalisa distribusi tegangan pada struktur dapat dilakukan perhitungan teoritis dan simulasi metode elemen hingga. Beberapa penelitian menggunakan metode elemen hingga yaitu Atanasovska dkk. (2007) menganalisa distribusi tegangan bending pada spur gear. Marciniec dkk. (2009) menganalisa distribusi tegangan bending dan tegangan kontak pada spur gear dan membandingkan dengan perhitungan teoritis. Taufan dkk. (2012)
commit to user
membandingkan kekuatan spur gear dengan profil gigi cycloid dan involute. Cojocaru dkk. (2014) menganalisa distribusi tegangan poros bertangga pada sistem roda gigi menggunakan metode elemen hingga, dan tegangan terbesar terjadi pada diameter poros terkecil.
Williamson dkk. (2014) melakukan percobaan pemilihan turbin ber-dasarkan 6 buah kriteria (efisiensi, power, portability, civil work, perawatan, modularity) pada 13 jenis turbin (terdiri dari tipe implus, reaction, water wheels, archimedes screw). Pada percobaan semua turbin menggunakan variasi kriteia yang sama, diantaranya power yang dihasilkan 1,3 kW, head 0,5 – 1,3 m, dan debit yang bervariasi tergantung musim. Secara teknis, power density terbesar mendekati 10 Kw/m3 pada turbin radial (draft tube) pada head 0,5 m; dan efisiensi terbesar mendekati 8,5% pada turbin singel jet pelton wheel pada head 2 m. Sedangkan secara multi kriteria weighted score terbesar pada turbin single-jet turgo wheel dengan nilai mendekati 0,8 pada head 3,5 m. Berdasarkan hasil tersebut membangun sistem pico hydro tidak hanya memahami aspek secara teknis, namun juga harus memahami aspek-aspek yang lain seperti 6 kriteria yang telah disebutkan pada percobaan.
Razak dkk, (2011) mengaplikasikan sistem transmisi sprocet pada pico hydro dengan turbin croosflow. Variasi perbandingan transmisi antara penggerak dan yang digerakkan 50:12, 70:12, dan 12:108 dengan ketinggah (head) 1,2 meter dan flow rate 20 L/s. Pada perbandingan transmisi 50:12 generator menghasilkan tegangan (voltage) 9,50 V dengan arus (current) 3,10 A atau 29,45 Watt. Pada perbandingan 70:12 generator menghasilkan tegangan 11,2 V dengan arus 3,74 A atau 41,8 Watt. Pada perbandingan 108:12 generator menghasilkan tegangan 15,25 V dengan arus 4,52 A 68,93 Watt. Semakin besar perbandingan transmisi semakin besar pula daya yang dihasilkan, hal ini disebabkan semakin cepat generator berputar, semakin besar pula daya yang dihasilkan oleh generator.
Anasovska dkk. (2007) melakukan penelitian kekuatan spur gear meng-gunakan metode elemen hingga tiga dimensi. Pada penelitian menganalisa distribusi tegangan bending dan tegangan kontak yang terjadi sepanjang lebar gigi. Hasil penelitian ini adalah tegangan bending terjadi pada akar roda gigi yang terjadi sepanjang ketebalan gigi, semakin ke tengah akan semakin meningkat dan
commit to user
mencapai maksimal tepat di tengah dan berlaku simetris, sedangkan tegangan kontak yang terjadi merata sama besar sepanjang lebar roda gigi.
Marciniec dkk. (2009) menganalisa distribusi tegangan bending dan tegangan kontak pada spur gear menggunakan metode elemen hingga dan mem-bandingkan dengan perhitungan teoritis. Pada tegangan bending didapat tegangan maksimal terjadi pada tengah dari lebar gigi, sedangkan tegangan kontak didapat tegangan maksimum pada pitch line sepanjang lebar gigi. Pada perbandingan perhitungan teoritis dengan meode elemen hingga pada tegangan bending (persamaan lewis) didapat perbedaan 7,73%-8,2%, sedangkan perbedaan nilai pada tegangan kontak (persamaan hertz) sebesar 13-14%.
Taufan dkk. (2012) melakukan penelilitan membandingkan kekuatan spur gear dengan profil gigi cycloid dan involute. Pada penelitian menunjukkkan tegangan yang terjadi pada profil gigi cycloid lebih rendah dari tegangan yang terjadi pada profil gigi involute. Pada profil gigi cycloid maupun involute distribusi tegangan yang terjadi pada bagian yang sama, yaitu ujung gigi semakin ke arah akar gigi maka tegangan yang terjadi akan semakin besar. Tegangan maksimal dari kedua profil gigi terletak di titik yang sama yaitu pada daerah fillet. Hal ini terjadi karena pada daerah fillet terjadi karena pembebanan momen bending dan karena bentuk dari fillet sendiri menyebabkan konsentrasi di daerah tersebut menjadi tinggi.
Mustofa dkk. (2014) menguji perancangan generator permanen magnet. Pada pengujian generator tanpa beban menunjukkan semakin naik putaran generator, maka semakin naik tegangan (volt) yang dihasilkan. Pada pengujian generator menggunakan beban lampu didapat hubungan beban dengan tegangan dan beban dengan arus. Pada hubungan beban dengan tegangan didapat semakin besar beban lampu yang digunakan semakin menurun tegangan yang dihasilkan generator, hal ini disebabkan oleh adanyaimpedansi dan rugi-rugi tegangan stator generator terhadap beban sehingga terjadi tegangan jatuh pada generator. Pada hubungan beban dengan arus didapat semakin besar beban lampu yang digunakan semakin naik arus yang dihasilkan generator, hal ini disebabkan oleh upaya generator untuk memenuhi kebutuhan arus terhadap beban yang diterima.
commit to user 2.2 Dasar Teori
2.2.1 Pembangkit Listrik Tenaga Air Pico Hydro
Berdasarkan besarnya daya listrik yang dihasilkan, PLTA diklasifikasikan beberapa macam, seperti yang ditunjukan pada tabel 2.1 Pada PLTA dengan klasifikasi large untuk menghasilkan power lebih dari 100 MW pada umumnya memerlukan penampungan dengan kapasitas besar, seperti bendungan. Sedangkan untuk klasifikasi pico, tidak memerlukan penampung air, karena hanya digunakan untuk menghasilkan listrik tidak lebih dari 5 kW (Ho-Yan, 2012).
Table 2.1 Klasifikasi PLTA berdasarkan dayanya (Ho-Yan, 2012)
Classification Power Output
Large > 100 MW Medium 10-100 MW Small 1-10 MW Mini 100 kW – I MW Micro 5-100kW Pico <5 kW
PLTA pada prinsipnya memanfaatkan beda ketinggian dan jumlah debit air per detik. Gambar 2.1 yang menunjukkan prinsip kerja pembangkt listrik turbin propeller, diman aliran air ini akan memutar poros turbin sehingga menghasilkan energi mekanik. Energi ini selanjutnya menggerakkan generator dan generator menghasilkan listrik.
commit to user
Secara garis besar turbin dapat dibagi dalam dua kategori yaitu turbin impuls dan turbin reaksi. Gambar 4.2a menunjukkan contoh turbin implus, dan Gambar 4.2b menunjukkan contoh turbin reaksi.
(a)
(b)
Gambar 2.2 Macam-macam turbin implus (Bonhomme, 2004)
Tabel 2.2 menunjukan perbandingan nilai karakteristik pada macam-macam turbin, secara tidak langsung akan mempengaruhi biaya dan investasi dalam membuatnya. Pada proses pembuatannya, PLTA Pico Hydro memerlukan investasi yang relatif kecil atau murah, sehingga diperlukan karakteristik kontruksi dengan segala peralatan pendukungnya yang murah dan memiliki efisiensi yang baik (Ho-Yan, 2012).
Tabel 2.2 Perbandingan pemilihan turbin berdasarkan karakteristiknya (Ho-Yan, 2012) Karakteristik Tipe Turbin Pelton n Turgo Cross-
Flow Propeller Francis Kapalan PAT
Efisiensi - Desain 0 0 - + + + 0 Efisiensi - Pembuatan 0 0 + - - + - Kontruksi 0 0 + + - - - Biaya 0 0 0 + - - - Perawatan- Perbaikan 0 0 0 + - - - Portabilitas 0 0 0 + + 0 0 Kemampuan Modularitas + + + + + - _
commit to user 2.2.2 Transmisi Roda Gigi
Transmisi roda gigi atau juga disebut sistem gearbox dapat didefinisikan sebagai suatu kotak atau box yang berisi sistem roda gigi. Gearbox memiliki bervariasi ukuran, kapasitas, dan rasio kecepatan sesuai dengan daya yang akan direduksi. Melalui gearbox, kecepatan rotasi dari sistem penggerak sebagai input diubah menjadi output yang memiliki kecepatan yang lebih rendah dengan torsi yang lebih tinggi atau sebaliknya kecepatan yang lebih tinggi dengan torsi yang
lebih rendah. Roda gigi yang menerima input biasanya disebut driving gear dan
roda gigi menuju ke output disebut driven gear. A. Rasio Roda Gigi
Rasio roda gigi biasanya dinyatakan dalam angka berupa pecahan desimal, yang menyatakan jumlah putaran poros input dibandingkan dengan jumlah putaran poros output. Secara sederhana dari rasio kecepatan transmisi seperti pada gambar 2.3, dimana poros input terdiri dari ω1 dan n1, sedangakan poros output terdiri dari ω2 dan n2. Dimana Speed (n) dinyatakan dalam revolutions per minute (RPM) dan ω adalah kecepatan sudut yang dinyatakan dalam rad/s.
Gambar 2.3 Diagram sederhana gearbox (Bhatia, 2012)
Dengan ω1 n1 sebagai input dan ω2 n2 sebagai output, maka rasio roda gigi dapat dinyatakan sebagai berikut :
Rasio roda gigi
=
( )( )
=
... (2.1) B. TorqueSebuah poros yang berputar dengan daya “P Watt” dengan speed “n RPM” sehingga nilai torsi didapat dengan:
=
commit to user
Pada keadaan ideal gearbox, Daya input dengan daya output adalah sama, sehingga: = ... (2.2a) = = Gear Rasio (GR) ... (2.2b) Atau = ... (2.2c) dimana P daya yang dipindahkan (Watt), n1 putaran input (rpm), n2 putaran output (rpm), T1 torsi input (Nm), T2 torsi output (Nm).
Gearbox dengan jumlah gigi yang banyak akan selalu berputar lebih lambat
dari kecepatan roda gigi dengan jumlah yang lebih kecil, namun akan menghasilkan torsi lebih besar. Sebaliknya apabila kecepatan meningkat, torsi akan berkurang.
C. Rangkaian Roda Gigi
Dalam rangkaian roda gigi meliputi dua atau lebih roda gigi penggerak yang bekerja secara bersama yang saling menghubungkan antar gigi dan berotasi satu sama lainnya dalam sistem untuk memindahkan daya. Berdasarkan bentuknya rangkaian roda gigi dapat dibagi menjadi beberapa sistem, yaitu:
1. Rangkaian sederhana
Dalam rangkaian ini, masing-masing poros terdiri dari sebuah roda gigi saja.. Gambar 2.4 menunjukkan contoh rangkaian sederhana roda gigi, dengan arah putaran terbalik dari satu roda gigi dengan roda gigi lainnya
commit to user 2. Rangkaian Compound (Gabungan)
Dalam rangkaian ini setiap poros, kecuali yang pertama dan terakhir, terdiri dari dua buah roda gigi, dimana salah satu roda gigi menerima gerak dari roda pertama dan yang lain menggerakkan roda gigi berikutnya. Gambar 2.5 menunjukkan rangkaian gabungan dari empat roda gigi, dimana roda gigi B output dari pasangan pertama dan roda gigi C merupakan masukan dari kedua pasangan. Roda gigi B dan C terletak pada poros yang sama dan berputar pada kecepatan yang sama pula.
Gambar 2.5 Rangkaian compound (gabungan) (Bhatia, 2012) 3. Rangkaian Planetary/Epicyclic
Dalam rangkaian ini, pusat rotasi terdiri dari satu atau lebih roda yang terikat pada lengan yang berputar pada sumbu rotasi salah satu roda lainnya. Gambar 2.6 menunjukkan roda gigi B berada di ujung lengan A. Roda gigi B terikat dengan roda gigi C dan berputar di sekitarnya saat lengan berputar. Dimana roda gigi B disebut roda gigi planet dan roda gigi C disebut roda gigi matahari.
Gambar 2.6 Rangkaian Planetary/Epicyclic (Bhatia, 2012) 2.2.3 Macam-Macam Roda Gigi (Gear)
Roda gigi digunakan untuk mentrasmisikan daya dan putaran dimana bentuk fisiknya memiliki gigi disekelilingnya, sehingga penerus daya dilakukan oleh gigi-gigi kedua roda yang saling berkaitan. Roda gigi sering digunakan
commit to user
karena dapat meneruskan putaran dan daya yang bervariasi dan lebih kompak daripada menggunakanalat trasmisi yang lainnya (Chan, 2011).
A. Klasifikasikan Roda Gigi
Pada umumnya roda gigi sering diklasifikasikan berdasarkan bentuk geometrinya, antara lain roda gigi lurus (spur gear), roda gigi miring (helical gear), roda gigi kerucut, dan roda gigi cacing (worm gear) (Setiyana, 2007).
1. Roda Gigi Lurus (Spur Gear)
Berdasarkan bentuk geometrinya, spur gear merupakan jenis roda gigi yang paling sederhana dari semua jenis roda gigi. Gambar 2.4 menunjukkan posisi gigi-gigi dari spur gear berbentuk saling sejajar terhadap porosnya dan memindahkan daya diantara dua buah posos juga saling sejajar (Cheng, 2011).
Gambar 2.7 Spur Gear (Cheng, 2011) 2. Roda Gigi Miring (Helical Gear)
Helical gear biasanya digunakan untuk memindahkan gerakan (daya) diantara dua buah poros yang sejajar. Pada helical gear gigi memotong/membentuk sudut terhadap sumbu poros atau yang lebih dikenal dengan helix angel (ψ) seperti pada gambar 2.5 yang menunjukkan jenis helical gear ganda yang sejajar. Susunan dan bentuk dari helical gear ini memiliki kelebihan dibandingkan spur gear, yaitu memiliki suara lebih halus dan getaran yang lebih kecil (Cheng, 2011).
commit to user 3. Roda Gigi Kerucut (Bevel Gear)
Bevel gear digunakan untuk memindahkan gerakan (daya) diantara dua sumbu poros yang tidak sejajar atau saling berpotongan yang membentuk sudut 900 seperti ditunjukkan gambar 2.6 (Chan, 2011).
Gambar 2.9 Bevel gear (Chan, 2011) 4. Roda Gigi Cacing (Worm Gear)
Roda gigi cacing digunakan untuk memindahkan gerakan (daya) diantara dua sumbu poros yang saling bersilang mirip pada hypoid gear, namun ukuran dan bentuknya berbeda. Driving gear pada roda gigi ini berbentuk silinder ulir yang menyerupai screw (baut), sedangkan driven gear menyerupai helical gear namun permukaan giginya membentuk lengkungan ke dalam seperti yang ditunjukkan gambar 2.7. (Cheng, 2011).
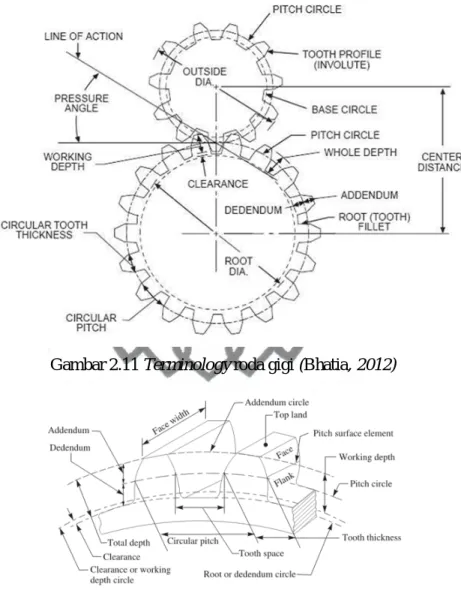
Gambar 2.10 Worm gear (Cheng, 2011) B. Terminology Roda Gigi
Menurut Chan (2011) terdapat banyak istilah yang digunakan untuk menyebut bagian-bagian dari roda gigi (terutama roda gigi lurus), seperti yang ditunjukkan pada gambar 2.9 dan gambar 2.10 Istilah dan bagian roda gigi tersebut adalah:
commit to user 1. Lingkaran pitch / pitch circle (D)
Lingkaran khayal yang menggelinding tanpa terjadinya selip. Lingkaran ini merupakan dasar untuk memberikan ukuran roda gigi lainnya.
2. Pinion
Roda gigi yang lebih kecil dalam suatu pasangan roda gigi. 3. Diameter lingkaran pitch / pitch circle diameter
Merupakan diameter dari lingkaran pitch. 4. Diameteral pitch (DP)
Jumlah gigi persatuan pitch diameter.
= ... (2.3) = . ... (2.3a) dimana z = jumlah gigi, dan m = module
5. Modul / module (m)
Perbandingan antara diameter lingkaran pitch dengan jumlah gigi.
m = = ... (2.4)
6. Jarak bagi lingkar / circulat pitch (CP)
Jarak sepanjang pitch antara profil dua gigi yang berdekatan atau keliling lingkaran pitch dibahi dengan jumlah gigi.
7. Addendum (Add)
Jarak antara lingkaran kepala dengan lingkaran pitch diukur dalam arah radial. 8. Clearance
Jarak ruang antar roda gigi yang diukur sepanjang lingkaran pitch. 9. Working Depth (WD)
Jumlah jari-jari lingkaran kepala dari sepasang roda gigi yang berkontak dikurangi dengan jarak poros.
10. Tebal gigi / tooth thickness (t)
Lebar gigi diukur sepanjang lingkaran pitch. 11. Sudut tekan / preasure angle
Sudut yang dibentuk dari garis normal dengan kemiringan dari sis kepala gigi. 12. Lebar gigi / face width
commit to user 13. Pitch point
Titik singgung dari lingkaran pitch sepanjang roda gigi yang kontak, juga merupakan titik potong anatara garis kerja dan garis pusat.
14. Operating pitch circle
Lingkaran-lingkaran singgung dari sepasang roda gigi yan berkontak dan jarak porosnya menyimpang dimana secara teoritis hal ini benar.
Gambar 2.11 Terminology roda gigi (Bhatia, 2012)
Gambar 2.12 Penampang permukaan roda gigi (Bhatia, 2012) 15. Kedalaman total / total depth
Penjumlahan dari addendum dan dedendum. 16. Backlash
commit to user 17. Sisi kepala / face of tooth
Permukaan gigi diatas lingkaran pitch. 18. Sisi kaki / flank of tooth
Permukaan gigi dibawah lingkaran pitch. 19. Puncak kepala / top land
Permukaan di puncak gigi.
Apabila perbandingan antar roda gigi diketahui, maka jumlah gigi pada pinion (TP) minimum didapat dengan persamaan:
=
... (2.5)
dimana Aw Perbandingan addendum dengan modul, G Gear Ratio, dan θ
Pressure angle (200).
Sularso (1997) menyatakan berdasarkan daya yang direncanakan dan putaran penggerak, module roda gigi lurus dengan pressure angle 200 dapat dipilih sementara dari gambar 2.11.
commit to user
Sularso (1997) menyatakan umumnya harga b ditetapkan antara (6-10)m.
Khurmi dan Gupta (2005) menunjukkan standar proporsional dan geometri pada Spur Gear berdasarkan ukuran module (m) dan pressure angel seperti yang ditunjukkan pada table 2.3.
Tabel 2.3 Standar proporsional roda gigi lurus (Khurmi dan Gupta, 2005)
No Particulars 14,50 20 0 full depth involute system 200 stub involute system 1 Addendum 1 m 1 m 0,8 m 2 Dedendum 1,25 m 1,25 m 1 m 3 Working Depth 2 m 2 m 1,6 m
4 Minimum Total Depth 2,25 m 2,25 m 1,8 m 5 Tooth Thickness 1,5708 m 1,5708 m 1,5708 m 6 Minimum Clearance 0,25 m 0,25 m 0,2 m 7 Fillet Radius in Root 0,4 m 0,4 m 0,4 m
2.2.4 Dasar perhitungan mekanika roda gigi A. Tangential Load
A.
B.
Gambar 2.14 Gaya-gaya pada gigi (Khurmi dan Gupta, 2005)
Dengan menganggap sebuah gigi sebagai balok cantilever yang mendapat gaya oleh Normal Load (WN) seperti yang ditunjukkan gambar 2.12. Normal Load
(WN) dibentuk dari dua gaya, yaitu gaya tangential (WT) dan gaya radial (WR)
yang bekerja tegak lurus dan sejajar dari titik pusat dari gigi. Gaya tangential (WT)
menyebabkan bending stress yang cenderung mematahkan gigi. Gaya radial (WR)
menyebabkan compressive stress yang relatif kecil efeknya, oleh karena itu efek dari gaya radial sering diabaikan. Sehingga bending stress digunakan sebagai dasar perencanaan roda gigi. Bagian kritis atau bagian yang menjadi titik maksimum bending stress ditunjukkan pada gambar pada bentuk parabola A dan
commit to user
gaya tangential pada gigi ditunjukkan kurva B dan C. Bentuk parabola yang ditunjukkan 2.14 merupakan garis luar dari balok dengan gaya yang diterima seragam, jika gigi berbentuk parabola maka akan mendapat tekanan yang sama pada semua bagian. Namun gigi memiliki bentuk yang lebih besar dari parabola pada setiap bagian, kecuali bagian BC. Sehingga kurva BC merupakan bagian yang mengalami tegangan terbesar atau bagian paling kritis (Khurmi dan Gupta, 2005).
Gaya tangential juga dapat dicari apabila telah diketahui daya (watt), speed (r.p.m), maupun torsi (Nm) yang akan dipindahkan. Selain variabel tersebut nilai juga mempertimbangkan faktor penggunaan atau service factor ( ), dimana besaran nilainya ditunjukkan pada tabel 2.4 Sehingga persamaan tersebut menjadi:
= . ... (2.6) dimana, = . . ... (2.6a) v kecepatan putar (m/s), Gaya tangetial (N), P Power (Watt), D diameter roda gigi (m), N Speed (r.p.m), service factor.
Tabel 2.4 Nilai service factor ( ) (Khurmi dan Gupta, 2005)
Type of load Type of service
3 hour per day 8-10 hour per day 24 hour per day
Steady 0,8 1,00 1,25
Light shock 1,00 1,25 1,54
Medium shock 1,25 1,54 1,80
Heavy shock 1,54 1,80 2,00
B. Persamaan Lewis
Nilai bending stress maksimum (
)
atau yang disebut persamaan lewis pada kurva BC (gambar 2.12) didapat dengan:=
. . ... (2.7) Berdasarkan jumlah giginya, nilai y dapat ditentukan dengan faktor bentuk gigi atau yang biasa disebut Lewis Factor yang ditunjukkan pada tabel 2.5 (untuk Pressure angel 200 Full Depth).
commit to user
Tabel 2.5 Nilai y Lewis Factor (Khurmi dan Gupta, 2005)
Sularso (1997) menyatakan semakin besar kecepatan keliling roda gigi, semakin besar pula beban yang terjadi. Sehingga koreksi karena kecepatan ini diberikan dalam bentuk faktor dinamis, yang ditunjukkan pada tabel 2.6.
Tabel 2.6 Nilai faktor dinamis (Sularso, 1997)
Kecepatan Faktor Dinamis (fv)
Rendah (0,5-10 m/s) = Sedang (5-20 m/s) = Tinggi (20-50 m/s) =
, , √
Sehingga persamaan (2.8b) yang telah terkoreksi bebentuk:
= . . . . ... (2.8) Maka, lebar sisi b dapat diperoleh:
=
. . . ... (2.8a) dimana gaya tangetial (N), tegangan bending maksimal dari bahan (N/ mm), lebar gigi (mm), module (mm), lewis factor, faktor dimanis. C. Tegangan Kontak (Persamaan Hertz)
Apabila tekanan antara sesama permukaan gigi terlalu besar (gambar 2.16), maka gigi akan mengalami keausan semakin cepat. Selain itu gigi juga akan mengalami kerusakan karena keletihan oleh oleh beban yang berulang-ulang. Sehingga tekanan yang dikenakan pada permukaan gigi harus dibatasi. Besarnya
Number of Teth Y Number of Teth Y
12 0,245 20 0,322 13 0,261 21 0,328 14 0,277 22 0,331 15 0,290 24 0,337 16 0,296 26 0,346 17 0,303 28 0,353 18 0,309 30 0,359 19 0,314 34 0,371
commit to user
tekanan tersebut disebut dengan “Tegangan Hertz” yang dapat dinyatakan sebagai berikut: . . . ... (2.9) dimana, c = ... (2.9a)
gaya tangential (N), b lebar roda gigi (mm), v poisson’s ratio bahan, E Young’s modulus (MPa), d diameter roda gigi (mm).
Gambar 2.15 Tegangan kontak pada roda gigi (Sularso, 2007)
Dengan menambah koreksi faktor tegangan gesek (KH) gigi pada bahan
roda gigi. Harga faktor tegangan gesek (KH) merupakan perbandingan antara
bahan yang digunakan pada gear dan pinion. Sularso (1997) menyatakan apabila tegangan kontak (KH) dikaitkan dengan gaya tangential yang terjadi, maka didapat
persamaan sebagai berikut:
= . . . . ... (2.10)
Maka, lebar sisi b’ dapat diperoleh:
′ =
( . . . ) ... (2.10a)
dimana gaya tangetial (N), faktor dimanis, faktor koreksi tegangan gesek, ′ lebar gigi (mm), diameter pinion (mm), jumlah gigi pinion, jumlah gigi gear.
commit to user 2.2.5 Poros dan Pasak
A. Poros Transmisi
Sularso (1997) menyatakan jika P (Watt) merupakan daya dari penggerak, maka berbagai macam faktor keamanan biasanya dapat diambil dalam perencanaan, sehingga koreksi pertama yang dapat diambil kecil. Jika faktor koreksi adalah (Tabel 2.7), maka daya yang dapat direncanakan yaitu:
= P. ... (2.11) Tabel 2.7 Faktor koreksi daya yang dipindahkan
Daya yang akan Dipindahkan Faktor Koreksi (fc)
Daya rata-rata yang diperlukan 1,2 – 2 Daya maksimum yang diperlukan 0,8 – 1.2
Daya Normal 1,0 – 1,5
Jika momen puntir atau torsi yang direncanakan adalah T (N.m), maka:
= T. ... (2.12) sehingga,
T = 9,56 . ... (2.12a)
dimana T torsi rencana (N.m), Pd daya rencana (Watt), dan n putaran
rencana (rpm).
Apabila torsi rencana (T) dibebankan pada suatu diameter poros ds (mm), maka tegangan geser τ (N/mm2) yang terjadi adalah
τ = . / =
,
... (2.13) dimana τ tegangan geser (N/mm2), T torsi (Nm), Ps diameter poros (mm).
Berdasarkan ASME, batas kelelahan puntir adalah 18% dari kekuatan tarik σT (N/mm2). Untuk harga 18% ini faktor keamanaan diambil sebesar 1/0,18=5,6 dan faktor ini dinyatakan dengan Sf 1. Selanjutnya ditinjau apakah poros tersebut diberi alur pasak atau dibuat bertangga, karena pengaruh konsentrasi tegangan yang cukup besar. Dengan pengaruh tersebut diambil faktor yang dinyatakan
commit to user
sebagai Sf2 dengan harga mulai 1,3–3,0. Dari hal tersebut maka besarnya tegangan geser yang terjadi dengan faktor keamanan, yaitu:
τa = σT/( Sf 1 x Sf 2) ... (2.14) dimana τa tegangan geser dengan faktor keamanan (N/mm2), Sf 1 dan Sf 2 faktor keamanan.
Berdasarkan ASME, koreksi besar torsi dinyatakan dengan Kt dengan nilai
1,0 jika yang dikenakan secara halus, 1,0–1,5 jika terjadi sedikit kejutan atau tumbukan, dan jika 1,5–3,0 jika beban yang dikenakan dengan kejutan atau tumbukan besar. Apabila diperkirakan terjadi beban lentur, maka digunakan faktor yang dinyatakan Cb yang harganya 1,2–2,3. Sehingga dari persamaan 2.14 diperoleh rumus untuk menghitung diameter poros d3 (mm) sebagai berikut:
d3 =
,
. . . ... (2.15)
Tegangan geser maksimal yang terjadi pada poros dapat dihitung dengan diasumsikan berpenampang lingkaran yang dipuntir dengan torsi sebesar T, sehingga tegangan geser maksimal (
τ
maks)
didapat dengan:τ
= . ... (2.16) dimana, J = ... (2.16a)τ
tegangan geser (N/mm2), T torsi (Nmm), J inertia polar, D diameter poros (mm).B. Pasak
Chan (2011) menyatakan pasak merupakan suatu elemen mesin yang dipakai untuk menetapkan bagian-bagian mesin seperti roda gigi, sprocket, pulley, kopling, dll. pada poros. Gambar 2.13 menunjukkan jenis pasak melintang benam segi empat dimana d adalah diameter poros, b lebar pasak, dan t ketinggian pasak. Ukuran lebar dan ketinggian pasak melintang benam segi empat dapat mengguna-kan standar IS : 2292 dan 2293 – 1963, sesuai yang ditunjukmengguna-kan pada table 2.8
commit to user
Gambar 2.16 Penampang pasak (Chan, 2011) Tabel 2.8 Ukuran pasak berdasarkan diameter poros Diameter Poros (mm) Penampang Pasak Diameter Poros (mm) Penampang Pasak Lebar (mm) Tebal (mm) Lebar (mm) Tebal (mm) 6-7 2 2 44 14 9 8-9 3 3 50 16 10 10-11 4 4 58 18 11 12-16 5 5 65 20 12 17-21 6 6 75 22 14 22-29 8 7 85 25 14 2.2.6 Material
Sudira (1999) menyatakan nylon dan ptfe adalah salah satu macam plastik industri yang dikembangkan dan diaplikasikan sebagai part atau komponen alat mekanis. Secara umum nylon memiliki sifat plastik yang kuat, unggul dalam pelumasan, ketahanan abrasi yang tinggi, ketahanan terhadap kimia. Karena keunggulan tersebut nylon banyak digunakan sebagai bantalan, bantalan luncur, roda gigi tanpa bunyi, cam, dan lain-lain.
Menurut Sakurman (2012) bahan nylon atau polyamide yang sering digunakan untuk membuat roda gigi adalah nylon seri 6 atau polyamide 6, yang memiliki sifat-sifat mekanik ditunjukkan tabel 2.9 . Sedangkan bahan ptfe atau teflon menurut Cambridge University (2003) dalam buku materials data book memiliki sifat mekanis ditunjukkan tabel 2.10.
Tabel 2.9 Sifat mekanik nylon 6 atau polyamide 6
No Sifat Nilai
1 Flexural Strength, yield 110 MPa 2 Modulus Elasticity 3300 MPa 3 Tensile Strength, yield 80 MPa 4 Tensile Strength, ultimate 82,7 MPa
commit to user
Tabel 2.10 Sifat-sifat mekanik ptfe atau teflon
No Sifat Nilai
1 Shear Strength 7 MPa
2 Modulus Elasticity 520 MPa
3 Poisson's ratio 0,46
4 Tensile Strength, ultimate 30 MPa
Joseph P (1957) menyatakan safety factor dapat tinjau berdasarkan nilai tegangan luluhnya. Untuk bahan yang diketahui sifat mekaniknya dan kondisi beban yang telah ditentukan, nilai yang safety factor digunakan yaitu 1,5–2,0. Sehingga nilai tegangan bahan yang diijinkan:
σ
ijin =
... (2.17)
2.2.7 Generator
Generator adalah alat yang digunakan untuk mengubah gerakan mekanik menjadi listrik. Secara umum generator terdiri dari dua bagian, yaitu bagian yang bergerak atau yang disebut rotor dan bagian yang diam atau yang disbut stator. Rotor adalah bagian dari generator yang berupa susunan dari beberapa magnet yang berbentuk lingkaran dengan kutub yang berbeda-beda pada masing-masing sisinya. Sedangkan stator adalah bagian berupa kumparan kawat tembaga yang berbentuk silindris dan akan menerima induksi magnet dari rotor sehingga terdapat aliran fluks magnet yang mengalir pada kumparan tersebut atau arus listrik, sedangkan perbedaan jenis kutub magnet yang menginduksi kumparan stator menyebabkan GGL induksi yang berubah-ubah pada ujung-ujung kumparan yang biasa kita sebut sebagai beda potensial atau tegangan (Mustofa, 2012).
Saat rotor berputar, maka akan muncul medan magnet pada stator, dimana besar kecil medan magnet tergantung frekuensi yang dihasilkan. Sedangkan nilai frekuensi dipengaruhi oleh speed putaran (rpm) dimana semakin cepat putaran, maka semakin frekuensi yang dihasilkan akan semakin besar oleh kutub-kutub medan magnet dalam menghasilkan tegangan listrik (Muchsin, 2013).
commit to user 2.2.8 Metode Elemen Hingga
Irwan (2008) menyatakan metode elemen hingga sebagai salah satu metode numerik untuk menyelesaikan berbagai permasalahan rekayasa dan tidak terlepas dari perkembangan komputer dengan berbagai bidang terkait lainnya seperti computer aided design dan computer aided engineering. Secara umum perangkat lunak metode elemen hingga memiliki tiga tahapan utama, yaitu:
1. Preprocessing
Pada tahap ini pengguna membuat model yang menjadi bagian untuk dianalisis dimana geometri tersebut dibagi menjadi sub-bagian yang atau disebut element, dihubungkan pada titik disebut node. Node tertentu akan ditetapkan sebagai bagian melekat yang kaku (fix displacement) dan bagian lain ditentukan sebagai bagian kena beban (load).
2. Analysis atau solving
Pada tahap ini data-data yang dimasukkan pada tahap preprocessing sebelumnya akan digunakan sebagai input pada kode elemen hingga untuk membangun dan menyelesaikan sistem persamaan aljabar linier atau non linier. 3. Post-processing
Menampilkan hasil akhir setelah menganalisa pada kasus preprocessing dengan menampilkan data displacements dan tegangan yang paling kritis pada geometri. Post-processor biasanya menampilkan grafis dengan kontur warna yang menggambarkan tingkatan tegangan yang terjadi pada geometri.