JURNAL KELAUTAN NASIONAL
Vol. 8, No. 3, Desember 2013
Kementerian Kelautan dan Perikanan
Badan Penelitian dan Pengembangan Kelautan dan Perikanan
Pusat Pengkajian dan Perekayasaan Teknologi Kelautan dan
Perikanan
Jurnal Kelautan Nasional (JKN) adalah jurnal yang diterbitkan oleh Pusat Pengkajian dan
Perekayasaan Teknologi Kelautan dan Perikanan, Badan Penelitian dan Pengembangan Kelautan
dan Perikanan, Kementerian Kelautan dan Perikanan. Puji syukur kepada Tuhan Yang Maha Esa,
atas terbitnya JKN Volume 8, No. 3, dengan baik.
Artikel yang diterbitkan dalam Jurnal edisi kali ini sebanyak 5 (lima) artikel yang meliputi:
Integrasi Sistem Elektronik Log Book Penangkapan Ikan (ELPI) dengan Sistem Pemantauan Kapal
Perikanan (VMS) untuk Pembangunan Perikanan Berkelanjutan; Teknologi Buoy untuk Observasi
In-Situ Perairan Sekitar Rumpon; Analisis Stabilitas Terhadap Operasional Desain Kapal Ikan 20
GT di Palabuhanratu; Teknologi Pengkayaan Unsur-unsur N, P, Fe pada Rumput Laut Gracilaria
verrucosa; dan Analisis Computational Fluid Dynamic (CFD) dalam Perancangan Turbin Arus
Laut Sumbu Vertikal (Vertical Axis Ocean Current Turbine, VAOCT).
Artikel yang terdapat dalam JKN pada edisi ini diharapkan mampu menambah khasanah informasi
di bidang teknologi kelautan dan perikanan Indonesia. Kami sangat mengharapkan saran dan kritik
untuk perbaikan penyusunan jurnal ini ke depan. Semoga jurnal ini bermanfaat bagi pengembangan
dan kemajuan teknologi kelautan dan perikanan di Indonesia.
DAFTAR ISI
Integrasi Sistem Elektronik Log Book Penangkapan Ikan (ELPI) dengan
Sistem Pemantauan Kapal Perikanan (VMS) untuk Pembangunan Perikanan
Berkelanjutan
Integration Between Electronic Fishing Log Book Systems with Vessel Monitoring
System for Sustainable Fisheries Development
Hadhi Nugroho, Agus Sufyan dan Rudhy Akhwady ...
101
Teknologi Buoy untuk Observasi In-Situ Perairan Sekitar Rumpon
The Buoy Technology for In-Situ Observation of Water Parameter Around Fish
Aggregating Device
Handy Chandra ...
111
Analisis Stabilitas Terhadap Operasional Desain Kapal Ikan 20 GT di
Palabuhanratu
Stability Analysis for 20 GT Fishing Vessel Operational Design in Palabuhanratu
Daud S. A. Sianturi dan Sofiyan M. Permana………..
120
Teknologi Pengkayaan Unsur-unsur N, P, Fe pada Rumput Laut Gracilaria
verrucosa
Enrichment Technology of N, P, Fe Elements to Seaweed Gracilaria verrucosa
Eka Rosyida, Enang H. Surawidjaja, Sugeng H. Suseno dan Eddy Supriyono ...
127
Analisis Computational Fluid Dynamic (CFD) dalam Perancangan Turbin Arus
Laut Sumbu Vertikal (Vertical Axis Ocean Current Turbine, VAOCT)
Analysis of Computational Fluid Dynamic (CFD) on Vertical Axis Ocean Current
Turbine (VAOCT) Design
R. Bambang Adhitya Nugraha, Nico Prayogo,
Muljowidodo Kartidjo dan
Sapto Nugroho
...
PEMBANGUNAN PERIKANAN BERKELANJUTAN
INTEGRATION BETWEEN ELECTRONIC FISHING LOG BOOK SYSTEMS WITH
VESSEL MONITORING SYSTEM FOR SUSTAINABLE FISHERIES DEVELOPMENT
Hadhi Nugroho, Agus Sufyan dan Rudhy Akhwady
Pusat Pengkajian dan Perekayasaan Teknologi Kelautan dan Perikanan (P3TKP) - KKP telah mengembangkan perangkat keras elektronik log book penangkapan ikan (ELPI) berbasis GPRS, dengan fungsi utama untuk input data tangkapan ikan secara elektronik. Alat ini juga dilengkapi dengan fitur rekam jejak kapal yang diprogram untuk mengirimkan data posisi koordinat setiap periode tertentu secara otomatis. Data rekam jejak kapal ini dapat diintegrasikan dengan sistem pemantauan kapal perikanan atau VMS yang dikelola oleh Direktorat Jenderal PSDKP - KKP. Penelitian ini bertujuan untuk mengintegrasikan sistem ELPI dengan sistem VMS offline. Penelitian ini terdiri dari beberapa tahap, yaitu perancangan perangkat lunak pada ELPI untuk mencatat rekam jejak kapal secara otomatis setiap 30 menit, perancangan perangkat lunak untuk integrasi sistem ELPI dengan VMS, serta pengujian di lapangan. Uji coba pengiriman data ELPI dibagi ke dalam dua server yaitu server P3TKP dan server VMS offline yang ada di PSDKP. Pada uji coba, data posisi koordinat berhasil terkirim ke server P3TKP dan server PSDKP setiap 30 menit secara otomatis, di mana data rekam jejak kapal tersebut dapat terlihat pada peta yang berada di perairan selatan Jawa Barat. Dengan terintegrasinya kedua sistem ini diharapkan dapat memperkuat pengumpulan data posisi kapal ikan khususnya kapal di bawah ukuran 30 GT.
Kata kunci: ELPI, VMS, integrasi, rekam jejak kapal, kapal perikanan
Research and Development Centre for Marine and Fisheries (P3TKP) – KKP has developed hardware of electronic fishing log book (ELPI) with the primary function for input the catch fish data electronically. It is also equipped with vessel tracking feature programmed to submit coordinate position data any definite period automatically. This vessel tracking data can be integrated with the Vessel Monitoring Systems run by the Directorate General of PSDKP - KKP. This research is aimed at integrating ELPI with the offline system of VMS. Research is composed of several stages, namely design software on recordings ELPI for noting ship automatically every 30 minutes, to design software systems integration ELPI with VMS, and testing in the field. Trial data transmission ELPI is divided into two servers namely server P3TKP and server VMS offline in PSDKP. On trial, data position coordinate successfully sent to server P3TKP and server PSDKP every 30 minutes automatically, on which the vessel tracking data of it can be seen on a map of the sea in the southern West Java. With the integration of these two systems is expected to strengthen collection the vessel fishing position data especially under capacity of 30 GT.
Keywords: ELPI, VMS, integration, vessel tracking, fishing vessel
2.
TEKNOLOGI BUOY UNTUK OBSERVASI IN-SITU PERAIRAN SEKITAR
RUMPON
THE BUOY TECHNOLOGY FOR IN-SITU OBSERVATION OF WATER PARAMETER
AROUND FISH AGGREGATING DEVICE
Handy Chandra
Aplikasi pemanfaatan buoy PLUTO sudah berhasil diujikan di perairan budidaya rumput laut (Wakatobi) tahun 2010, tambak (Pekalongan), muara pelabuhan perikanan Pekalongan dan keramba jaring apung Tuna di Wakatobi (2013). Pada tulisan ini dilakukan kajian secara teknis dan teoritis untuk
PLUTO buoy has already been tested in seaweed culture area (Wakatobi) in 2010, pond (Pekalongan), fishing port estuary in Pekalongan and Tuna sea cage in Wakatobi (2013). This paper describes technical and theoritical aspect to install buoy in waters around FAD (fish aggregating
penangkapan ikan di sekitar rumpon dengan parameter lingkungan perairan. Menurut literatur kajian ini masih jarang dilakukan dan mungkin belum pernah dilakukan, khususnya untuk pemantauan perairan sekitar rumpon dengan data secara menerus. Hasilnya adalah buoy perlu dilengkapi dengan sensor suhu, salinitas, oksigen terlarut, keasaman, klorofil-a, dan arus. Pemasangan pada rumpon cukup diikat saja, dan tidak mengubah perilaku dan kebiasaan nelayan dalam memasang rumpon.
Kata kunci: rumpon, suhu, salinitas, oksigen terlarut, keasaman, dan klorofil-a
assessed. According to references, this study is rarely conducted and probably never been done, especially with continuous data of measurement. Result showed that it need temperature, saliniity, DO, pH, chlorophyll-a and current sensors to be equipped on board. The installation of buoy is by tied it up, and do not change habits and cultures of fishermen.
Keywords: Fish Aggregating Device (FAD), temperature, salinity, DO, pH, chlorophyll-a
3.
ANALISIS STABILITAS TERHADAP OPERASIONAL DESAIN KAPAL IKAN 20
GT DI PALABUHANRATU
STABILITY ANALYSIS FOR 20 GT FISHING VESSEL OPERATIONAL DESIGN IN
PALABUHANRATU
Daud S. A. Sianturi dan Sofiyan M. Permana
Stabilitas merupakan salah satu aspek keselamatan dari sebuah desain kapal. Penelitian ini dilakukan di Palabuhanratu menggunakan desain kapal ikan berukuran 20 GT. Pada penelitian ini dilakukan analisis stabilitas pada 5 kondisi pembebanan kapal sehingga menghasilkan kapal yang baik sesuai standarisasi yang telah ditetapkan. Analisis stabilitas yang digunakan untuk mendapatkan lengan penegak GZ dilakukan dengan bantuan perangkat lunak untuk periode oleng menggunakan rumus InternationalMaritime Organization (IMO) dan untuk mengetahui
tinggi gelombang menggunakan rumus angkatan laut Jerman. Dari hasil penelitian menunjukkan kelima kondisi pembebanan yang terjadi di kapal memiliki stabilitas yang baik sesuai dengan kriteria yang telah ditetapkan oleh International Maritime Organization (IMO), periode oleng yang terjadi pada kapal berdasarkan kelima kondisi pembebanan berkisar 2,47-3,04 detik dan tinggi gelombang maksimal yang diterima oleh kapal sebesar 1,41 m dengan panjang gelombang sebesar 15,2 m.
Kata kunci: stabilitas, 20 GT, Palabuhanratu
Stability is one of the safety aspects of a ship design. This research was carried out at Palabuhanratu by using 20 GT fishing vessel design. This research investigated stability analysis for five ship loading conditions in order to produce a good ship with appropriate standardization which has been established. Stability analysis, which is used to obtain righting lever GZ, is conducted by the use of software, whereas the rolling period is calculated using the International Maritime Organization (IMO) formula and the calculation of wave height is carried out using German’s navy formula. The result of research showed that the five loading conditions that occur in ship have good stability in accordance with International Maritime Organization (IMO) criteria. The rolling period of the fifth loading conditions varied between 2,47 seconds and 3,03 seconds, whilst the maximum wave height of the ship is 1,41 m together with wavelength of 15,2 m. Keywords: stability, 20 GT, Palabuhanratu
verrucosa
Eka Rosyida, Enang H. Surawidjaja, Sugeng H. Suseno dan Eddy Supriyono
Penelitian ini bertujuan untuk mengkaji responpertumbuhan Gracilaria verrucosa melalui teknologi pengkayaan N,P dan Fe sebagai unsur hara makro dan mikro ke dalam media budidaya. Metode penelitian menggunakan Rancangan Acak Lengkap (RAL) dengan 4 perlakuan dan 3 ulangan, yaitu tanpa pengkayaan nutrien/non-enriched (A), pengkayaan N (B), pengkayaan N+P (C) dan pengkayaan N+P+Fe (D). Hasil penelitian menunjukkan pengkayaan N+P+Fe memberi pengaruh yang lebih tinggi terhadap pertumbuhan
G. verrucosa dan berbeda secara signifikan dengan
perlakuan lainnya (p<0.05). Disamping itu, klorofil dan konsentrasi N, P, Fe pada rumput laut juga terdeteksi lebih tinggi pada perlakuan tersebut. Dengan demikian dapat dikatakan teknologi pengkayaan dengan menggunakan kombinasi unsur hara makro (N,P) dan mikro (Fe) dalam budidaya G.
verrucosa dapat meningkatkan pertumbuhan secara
signifikan sehingga dapat dipertimbangkan untuk diaplikasikan dalam budidaya rumput laut tersebut. Meskipun secara umum kadar dan karakteristik physico-kimia agar lebih baik pada perlakuan pengkayaan N+P, namun kadar agar dan gel
strengthnya tidak berbeda dengan perlakuan pengkayaan N+P+Fe.
Kata kunci: pengkayaan, pertumbuhan, klorofil, kadar agar, physico-kimia agar
This study was aimed to assess the growth response of Gracilaria verrucosa after enrichment of N, P and Fe nutrients to the cultivation medium. The experiment was a complete randomized design with four treatments and in triplicate : non-enriched (A); enriched with N (B); enriched with N+P (C); and enriched with N+P+Fe (D). The results showed N+P+Fe treatment affect significantly higher on growth of G. verrucosa and significantly different compare to others (p<0.05). In addition, the seaweed chlorophyll content and N,P,Fe tissue retained were also high in those treatment. Hence, enrichment technology with the application of both macro (N, P) and micro (Fe) elements would become considerable to the massive culture of seaweed. Eventhough in general the yield and properties of agar revealed a good performance in N+P treatment,however,the agar content and gel strength was not different with N+P+Fe treatment.
Keywords: enrichment, growth, chlorophyll, agar yield, physico-chemistry of agar
5.
ANALISIS COMPUTATIONAL FLUID DYNAMIC (CFD) DALAM
PERANCANGAN TURBIN ARUS LAUT SUMBU VERTIKAL (VERTICAL AXIS
OCEAN CURRENT TURBINE, VAOCT)
ANALYSIS OF COMPUTATIONAL FLUID DYNAMIC (CFD) ON VERTICAL AXIS
OCEAN CURRENT TURBINE (VAOCT) DESIGN
R. Bambang Adhitya Nugraha, Nico Prayogo,
Muljowidodo Kartidjo dan Sapto Nugroho
Indonesia di masa mendatang akan menghadapi krisis energi konvensional dalam hal kaitannya dengan peningkatan kapasitas kebutuhan, pasokan yang terus menurun, harga tinggi dan permasalahan lingkungan yang ditimbulkan. Potensi energi laut Indonesia yang belum banyak dimanfaatkan dapat menjadi salah satu sumber energi alternatif yang bersih, dapat diandalkan dan terbarukan. Untuk dapat memanen energi yang dihasilkan dari arus laut tersebut, Pusat Pengkajian dan Perekayasaan
In the future, Indonesia will face a crisis of conventional energy with respect to increasing in demands, supply continues to fall, high price and environmental problems posed. Indonesia has huge potential in ocean energy, which can be used as one of the alternative energy source as it is clean, reliable and renewable. To be able to harvest the energy generated from ocean currents, Research and Development Center for Marine and Fisheries Technology (RDCMFT), Agency for Marine and
diharapkan dapat berputar pada putaran rendah. Studi lanjutan tentang bentuk blade-nozzle-guide
vane serta kombinasi di antara ketiganya menjadi
fokus utama agar dapat menghasilkan target output sebesar 10 kW.
Kata kunci: turbin seri kembar, Pembangkit Listrik Tenaga Arus Laut (PLTAL), Computational Fluid
Dynamic (CFD), gaya seret dan torsi
speed. Further study on shape of blade-nozzle guide vane and its vary combination become the main focus in order to produce a target output of 10 kW. Keywords: twin series turbine, Ocean Current Power Plant, Computational Fluid Dynamic (CFD), drag force and torque
INTEGRASI SISTEM ELEKTRONIK LOG BOOK PENANGKAPAN IKAN (ELPI)
DENGAN SISTEM PEMANTAUAN KAPAL PERIKANAN (VMS) UNTUK
PEMBANGUNAN PERIKANAN BERKELANJUTAN
INTEGRATION BETWEEN ELECTRONIC FISHING LOG BOOK SYSTEMS WITH VESSEL
MONITORING SYSTEM FOR SUSTAINABLE FISHERIES DEVELOPMENT
Hadhi Nugroho, Agus Sufyan dan Rudhy Akhwady
Pusat Pengkajian dan Perekayasaan Teknologi Kelautan dan Perikanan, Jl. Pasir Putih I Ancol Timur, Jakarta Email: [email protected], [email protected], dan [email protected]
Diterima tanggal: 7 Juni 2013, diterima setelah perbaikan: 30 Oktober 2013, disetujui tanggal: 2 Desember 2013
ABSTRAK
Pusat Pengkajian dan Perekayasaan Teknologi Kelautan dan Perikanan (P3TKP) - KKP telah mengembangkan perangkat keras elektronik log book penangkapan ikan (ELPI) berbasis GPRS, dengan fungsi utama untuk input data tangkapan ikan secara elektronik. Alat ini juga dilengkapi dengan fitur rekam jejak kapal yang diprogram untuk mengirimkan data posisi koordinat setiap periode tertentu secara otomatis. Data rekam jejak kapal ini dapat diintegrasikan dengan sistem pemantauan kapal perikanan atau VMS yang dikelola oleh Direktorat Jenderal PSDKP - KKP. Penelitian ini bertujuan untuk mengintegrasikan sistem ELPI dengan sistem VMS offline. Penelitian ini terdiri dari beberapa tahap, yaitu perancangan perangkat lunak pada ELPI untuk mencatat rekam jejak kapal secara otomatis setiap 30 menit, perancangan perangkat lunak untuk integrasi sistem ELPI dengan VMS, serta pengujian di lapangan. Uji coba pengiriman data ELPI dibagi ke dalam dua server yaitu server P3TKP dan server VMS offline yang ada di PSDKP. Pada uji coba, data posisi koordinat berhasil terkirim ke server P3TKP dan server PSDKP setiap 30 menit secara otomatis, di mana data rekam jejak kapal tersebut dapat terlihat pada peta yang berada di perairan selatan Jawa Barat. Dengan terintegrasinya kedua sistem ini diharapkan dapat memperkuat pengumpulan data posisi kapal ikan khususnya kapal di bawah ukuran 30 GT.
Kata kunci: ELPI, VMS, integrasi, rekam jejak kapal, kapal perikanan
ABSTRACT
Research and Development Centre for Marine and Fisheries (P3TKP) – KKP has developed hardware of electronic fishing log book (ELPI) with the primary function for input the catch fish data electronically. It is also equipped with vessel tracking feature programmed to submit coordinate position data any definite period automatically. This vessel tracking data can be integrated with the Vessel Monitoring Systems run by the Directorate General of PSDKP - KKP. This research is aimed at integrating ELPI with the offline system of VMS. Research is composed of several stages, namely design software on recordings ELPI for noting ship automatically every 30 minutes, to design software systems integration ELPI with VMS, and testing in the field. Trial data transmission ELPI is divided into two servers namely server P3TKP and server VMS offline in PSDKP. On trial, data position coordinate successfully sent to server P3TKP and server PSDKP every 30 minutes automatically, on which the vessel tracking data of it can be seen on a map of the sea in the southern West Java. With the integration of these two systems is expected to strengthen collection the vessel fishing position data especially under capacity of 30 GT.
Keywords: ELPI, VMS, integration, vessel tracking, fishing vessel
PENDAHULUAN
Untuk mendukung kebijakan pengelolaan sumber daya perikanan yang berkelanjutan, diperlukan data perikanan yang akurat terkait dengan kegiatan
penangkapan ikan. Salah satu cara untuk memperoleh data penangkapan ikan yang akurat adalah menggunakan log book harian penangkapan
ikan yang disyaratkan Direktorat Jenderal
dan Perikanan (KKP). Penggunaan log book penangkapan ikan selama ini dilakukan secara manual dengan menggunakan kertas. Hal ini banyak mengalami kendala seperti data yang diisi tidak lengkap / kurang valid / tidak masuk akal, kesadaran pelaku usaha penangkapan ikan masih rendah, kesulitan dalam pengisian form log book karena banyaknya data yang harus diisikan (Marzuki, 2011).
Untuk mengatasi kendala tersebut, maka Pusat Pengkajian dan Perekayasaan Teknologi Kelautan dan Perikanan (P3TKP), Badan Penelitian dan Pengembanagn Kelautan dan Perikanan (Balitbang KP), KKP berhasil mengembangkan perangkat Elektronik Log Book Penangkapan Ikan (ELPI) berbasis GPRS (General Packet Radio Service). ELPI merupakan perangkat keras elektronik dengan jumlah kolom yang diisikan lebih sedikit sehingga proses input menjadi lebih mudah, cepat, dan akurat.
Gambar 1. Perangkat keras ELPI Figure 1. The ELPI hardware
Namun, teknologi GPRS memiliki kelemahan terkait dengan jarak jangkauan sinyalnya, yaitu hanya sekitar 5-10 mil saja dari pantai (Marzuki, 2011).
Gambar 1 memperlihatkan foto perangkat keras ELPI. Perangkat keras ELPI tersebut berukuran panjang 23 cm, lebar 15 cm, dan tebal 7 cm. Bagian utama alat ini adalah LCD (Liquid Crystal
Display) layar sentuh berukuran 7 inch untuk
melakukan input data dan menampilkan tulisan, antena GPS (Global Positioning System), serta
adaptor. Alat ini juga dilengkapi dengan sensor oseanografi berupa sensor suhu, yang dapat dipasang jika akan digunakan untuk mengukur suhu permukaan laut.
Selain data tangkapan ikan, alat ini juga dilengkapi dengan fitur rekam jejak kapal (vessel tracking). Fitur ini dibuat agar ELPI bisa mengirimkan data koordinat kapal setiap periode tertentu secara otomatis. Pengaturan periode pengiriman data posisi tersebut dapat diatur sesuai dengan kebutuhan. Fitur rekam jejak kapal pada ELPI memiliki beberapa fungsi, yaitu:
Mengetahui pergerakan kapal dari berangkat
hingga mendarat kembali di pelabuhan.
Dapat digunakan sebagai validasi data lokasi
penangkapan ikan yang diinputkan melalui ELPI.
Hasil data rekam jejak kapal dengan ELPI selanjutnya dapat diintegrasikan dengan sistem VMS (Vessel Monitoring System) yang dikelola oleh Direktorat Jenderal Pengawasan Sumber Daya Kelautan dan Perikanan (Ditjen PSDKP) - KKP. VMS atau sistem pemantauan kapal perikanan merupakan salah satu bentuk sistem pemantauan
untuk mendukung pengawasan di bidang
penangkapan dan atau pengangkutan ikan, dengan menggunakan satelit dan peralatan pemancar (transmitter) VMS yang ditempatkan pada kapal perikanan guna mempermudah pengawasan dan pemantauan terhadap kegiatan / aktivitas kapal
perikanan (Direktorat Jenderal Pengawasan
Sumber Daya Kelautan dan Perikanan, 2012). Teknologi VMS, khususnya yang berbasis satelit terdiri dari tiga komponen penting (Gallagher, 2002), yaitu:
1. Sebuah transmitter atau transceiver yang
dipasang di kapal perikanan untuk
menunjukkan posisi kapal.
2. Media atau sistem transmisi sebagai wahana untuk mentransmisikan informasi posisi kapal dari kapal perikanan ke
Fisheries Monitoring Center (FMC).
3. Fisheries Monitoring Center (FMC) atau
pusat pemantauan untuk menerima,
menyimpan, menampilkan, dan
Prinsip kerja VMS secara umum diawali dari
transmitter yang mengirimkan data posisi kapal
setiap periode tertentu melalui sistem satelit.
Gambar 2. Prinsip kerja VMS
Figure 2. VMS working mechanism
Sumber:
http://ec.europa.eu/fisheries/cfp/control/technologies/vm s/index_en.htm
Satelit ini akan menerima pesan dari kapal dan mengirimkan ke pusat pengolahan data satelit,dan kemudian data posisi kapal yang telah diolah disampaikan ke FMC (Kusuma, 2009). Jika ada indikasi terjadi IUU Fishing, maka FMC akan menghubungi pihak patroli untuk dilakukan penindakan. Prinsip kerja VMS dapat dilihat pada Gambar 2.
Di Indonesia, VMS telah diterapkan
penggunaannya mulai tahun 2003 dan telah
dikembangkan beberapa kali. Untuk
mengimplementasikan VMS, di Kantor Pusat KKP di Jakarta telah dibangun Fishing Monitoring
Center (FMC), serta dilakukan pemasangan transmiter VMS pada kapal-kapal perikanan.
Hingga akhir tahun 2011, tercatat ± 4201 unit
transmitter VMS online terpasang dengan rata-rata
keaktifan 2122 unit, dan 1500 unit transmitter VMS offline terpasang dengan rata-rata keaktifan
970 unit. Data VMS yang diperoleh dapat digunakan untuk menganalisis tingkat kepatuhan kapal penangkap ikan dan kapal pengangkut ikan Indonesia terhadap ketentuan mengenai wilayah penangkapan, alat dan metoda penangkapan, pendaratan hasil tangkapan, dan lain sebagainya. (Republik Indonesia, 2012).
Operasionalisasi dan penyelenggaraan VMS untuk kapal perikanan saat ini diatur dengan Peraturan
Menteri Kelautan dan Perikanan Nomor
10/PERMEN-KP/2013 tentang Sistem Pemantauan Kapal Perikanan. Peraturan menteri tersebut mewajibkan kapal perikanan berukuran di atas 30 GT yang beroperasi di perairan Indonesia atau di laut lepas wajib memasang transmitter VMS
online dengan pengiriman data posisi kapal tiap 1
(satu) jam secara terus-menerus.
Sebelum
berlakunya Peraturan Menteri Kelautan dan Perikanan Nomor 10/PERMEN-KP/2013, penyelenggaraan VMS di Indonesia diatur dengan Peraturan Menteri Kelautan dan Perikanan Nomor PER.5/MEN/2007. Berdasarkan peraturan menteri tersebut, model VMS perikanan yang ada terdiri dari 2 jenis, yaitu VMS online yang diwajibkan untuk kapal perikanan berukuran di atas 60 GT dan VMS offline yang diwajibkan untuk kapal perikanan berukuran 30 - 60 GT. Pada VMSoffline, pengiriman data menggunakan teknologi
GPRS, yang akan mengirimkan data rekam jejak kapal perikanan bila mendapatkan sinyal GPRS. Bila tidak mendapat sinyal GPRS, data akan otomatis disimpan di data logger perangkat
transmitter VMS dan akan dikirimkan secara
otomatis ke server VMS offline bila terdapat sinyal GPRS.
Sistem rekam jejak kapal memungkinkan saling bersinerginya antara VMS offline dan ELPI dalam mencatat data posisi kapal perikanan selama beroperasi di tengah laut. Penelitian ini bertujuan untuk mengintegrasikan sistem ELPI dengan sistem VMS offline yang dikelola Ditjen PSDKP. Dengan adanya integrasi ini, diharapkan dapat diperoleh data yang lengkap berupa data penangkapan ikan dan data posisi kapal perikanan, sehingga dapat digunakan untuk mengelola sumber daya perikanan yang berkelanjutan.
BAHAN DAN METODE
Penelitian ini terdiri dari beberapa tahap, yaitu:
1. Perancangan perangkat lunak untuk
mencatat rekam jejak kapal.
2. Perancangan perangkat lunak untuk
integrasi sistem ELPI dengan VMS 3. Pengujian di lapangan
2.1. Perancangan Perangkat Lunak untuk Mencatat Rekam Jejak Kapal Secara Otomatis
Pada tahap ini, dilakukan perancangan perangkat lunak pada ELPI untuk mencatat rekam jejak kapal yang bisa di-setting akan mengirim data setiap 30 menit sekali secara otomatis. Data rekam jejak kapal tersebut berisikan: waktu, posisi koordinat, kecepatan kapal, dan arah kapal (heading). Langkah-langkah dalam proses perancangan ini
ditunjukkan pada Gambar 3. Perancangan
perangkat lunak ini menggunakan bahasa
pemrograman C++ untuk Qt framework.
Gambar 3. Diagram alir rutin pengiriman paket data VMS
Figure3. Flowchart of VMS data transmission
Proses diawali dengan pembacaan data koordinat dari sensor GPS, kemudian dilakukan perhitungan arah heading kapal. Data koordinat GPS tersebut kemudian dijadikan referensi penghitungan arah
heading kapal di periode VMS berikutnya.
Kemudian dilakukan pembangkitan paket data VMS. Paket data VMS tersebut kemudian disimpan di file log data harian dan file pending transmit data. Paket data VMS tersebut kemudian dikirim ke server ELPI dan server VMS di PSDKP.
2.2. Perancangan Perangkat Lunak untuk Integrasi Sistem ELPI dengan VMS
Pada proses ini, dilakukan perancangan agar data rekam jejak kapal dari perangkat ELPI dapat terkirim dan ditampilkan di web server VMS di PSDKP. Web server PSDKP dapat menerima dan membaca data tersebut, lalu menampilkan data tersebut di situs web PSDKP. Langkah-langkah dalam proses perancangan ini ditunjukkan pada Gambar 4.
Gambar 4. Diagram alir rutin pengiriman paket data ke server VMS - PSDKP
Figure4. Flowchart of data transmission to VMS - PSDKP server
Langkah-langkah pada Gambar 4 dapat dijelaskan sebagai berikut. Isi file pending transmit VMS akan disimpan ke buffer memori paket data. Perangkat ELPI akan melakukan setup koneksi ke server VMS di PSDKP. Setelah berhasil melakukan koneksi dengan server VMS di PSDKP, paket data VMS kemudian dikirim ke server tersebut. Paket data VMS tersebut kemudian diterima di server PSDKP untuk kemudian ditampilkan di situs web PSDKP.
Agar paket data VMS dari ELPI bisa diterima oleh server PSDKP, maka format data pada ELPI yang dikirim ke server PSDKP harus sesuai dengan format data server PSDKP. Format data tersebut adalah sebagai berikut.
GPRMC,IDOffline,hhmmss,A_atau_V,Lon gitude,N_atau_S,Latitude,E_atau_W,Speed String,HeadingString,ddmmyy,0,,0000
Setiap data dipisahkan dengan tanda koma. Arti format data tersebut adalah sebagai berikut:
GPRMC merupakan informasi minimal yang
direkomendasikan untuk pelacakan.
ID offline merupakan nomor identitas
perangkat transmitter VMS yang diberikan oleh Ditjen PSDKP.
hhmmss merupakan data jam, menit, detik saat
perangkat mengirim data.
A_atau_V merupakan kode status data, A
artinya data valid, V artinya data invalid.
Longitude merupakan data koordinat lintang.
N_atau_S merupakan nama lintang, jika N
berarti lintang utara, jika S berarti lintang selatan.
Latitude merupakan data koordinat bujur.
E_atau_W merupakan nama bujur, jika E
berarti bujur timur, jika W berarti bujur barat.
SpeedString merupakan data kecepatan kapal
dalam satuan knots.
HeadingString merupakan data arah (heading)
kapal dalam satuan derajat.
ddmmyy merupakan data hari, bulan, tahun saat
perangkat mengirim data.
0,,0000 menunjukkan checksum.
2.3. Pengujian
Pengujian ELPI dilakukan di PPN Palabuhanratu, Kabupaten Sukabumi, Jawa Barat. Prosedur pengujian yang dilakukan adalah sebagai berikut:
Peralatan ELPI dipasang di atas kapal
perikanan
Pengujian ini menggunakan alat ELPI dengan
ID 130013
Kapal melakukan pelayaran ke tengah laut
hingga alat tidak memperoleh sinyal GPRS
ELPI akan mengirimkan data posisi kapal,
arah/heading, dan kecepatan kapal tiap 30 menit secara otomatis.
Selama tidak terkoneksi dengan GPRS, data
akan tersimpan di dalam data logger ELPI.
Pemantauan rekam jejak kapal dapat
dilakukan melalui web
http://167.205.110.252/e-logbook yang
disediakan P3TKP.
Pemantauan rekam jejak kapal juga dapat
dilakukan melalui web FMC PSDKP: http://vmsoffline.psdkp.kkp.go.id.
Analisis data rekam jejak kapal dapat
dilakukan dengan memplotkan data posisi rekam jejak kapal ke dalam peta
Validasi dilakukan dengan menganalisis data
rekam jejak kapal yang ada di web P3TKP dan Pusdal PSDKP
HASIL DAN PEMBAHASAN
Hasil pengujian yang dilakukan pada kapal perikanan yang terpasang ELPI menunjukkan adanya jalur lintasan keberadaan kapal sesuai dengan koordinat GPS. Untuk membedakan jalur lintasan tiap kapal yang tercatat, maka setiap kapal yang terpasang ELPI diberikan nomor ID kapal pada saat registrasi awal. Data ID kapal tersebut akan terlihat pada webserver.
Gambar 5 memperlihatkan tampilan data posisi koordinat alat yang diuji coba pada kapal perikanan yang berpangkalan di PPN Palabuhan Ratu. Data rekam jejak kapal tersebut merupakan contoh sebagian data rekam jejak kapal yang diterima di sisi server P3TKP, serta ditampilkan dengan bantuan aplikasi Googlemap. Data rekam jejak kapal tersebut terlihat di perairan Samudra Hindia bagian selatan Jawa Barat.
Gambar 6 memperlihatkan tampilan data posisi koordinat alat yang diuji coba di salah satu kapal perikanan yang berpangkalan di PPN Palabuhan Ratu dan diterima di sisi server PSDKP. Data rekam jejak kapal tersebut terlihat dari perairan Samudra Hindia ke PPN Pelabuhan Ratu.
Gambar 5. Tampilan data rekam jejak kapal selama uji coba ELPI dilihat dengan Googlemap
Figure5. Display of vessel tracking data during the trial ELPI seen with Googlemap
Data rekam jejak kapal pada Gambar 6 terlihat memiliki pola yang sama dengan data rekam jejak kapal pada Gambar 5. Hal ini membuktikan data yang diterima di sisi server P3TKP dan server PSDKP berasal dari sumber yang sama yaitu data koordinat yang dikirim oleh alat ELPI.
Gambar 7 dan Gambar 8 memperlihatkan data yang dikirimkan selama pengujian di lapangan. Data yang ditandai garis warna merah pada Gambar 7 dan Gambar 8 memperlihatkan data waktu dan koordinat yang diterima database server P3TKP selama uji coba. Gambar 7 merupakan tampilan data mentah yang dikirim dari ELPI ke web server P3TKP. Data mentah tersebut memiliki format dan kode tententu.
Gambar 6. Tampilan data rekam jejak kapal di server PSDKP
Gambar 7. Tampilan data mentah pengujian ELPI di PPN Palabuhan Ratu pada web server P3TKP
Figure 7. Display of raw data from trial ELPI in PPN Palabuhan Ratu at P3TKP web server
Gambar 8. Tampilan data pengujian ELPI di PPN Pelabuhan Ratu
Sebagai contoh, pada data yang dilingkari garis merah tertulis data mentah sebagai berikut:
130013,10,VMS,031113,091858,813.621741,S,10 406.974534,E,3.77,72.19,031113,161537,,,,,,,,,,,,,,,, ,,,,,,,,,,,*CB
Setiap data dipisahkan dengan koma. Arti data tersebut adalah sebagai berikut:
• 130013 adalah ID alat ELPI.
• 10 adalah kode bahwa paket data tersebut adalah data VMS.
• VMS adalah nama paket data tersebut.
• 031113 adalah data tanggal pengiriman data VMS, sumber data dari modul GPS, dengan
format ddmmyy, dalam waktu GMT
(Greenwich Mean Time). Jadi, 031113 berarti 3 November 2013 GMT.
• 091858 adalah data waktu pengiriman data VMS, sumber data dari modul GPS, dengan format hhmmss, dalam waktu GMT. Jadi, 091858 berarti pukul 09:18:58 GMT.
• 813.621741 adalah data koordinat lintang
dalam format derajat dan menit
(dddmm.mmmmmm). 813.621741 berarti 8 derajat lintang, 13,621741 detik.
• S adalah data nama lintang. Jika S berarti ada di lintang selatan, jika N berarti ada di lintang utara.
• 10406.974534 adalah data koordinat bujur
dalam format derajat dan menit
(dddmm.mmmmmm). 10406.974534 berarti 104 derajat bujur, 6,974534 detik.
• E adalah data nama bujur. Jika E berarti ada di bujur timur, jika W berarti ada di bujur barat. • 3.77 adalah data kecepatan kapal dalam satuan
knots.
• 72.19 adalah data arah/heading kapal dalam satuan derajat.
• 031113 adalah data tanggal pengiriman data VMS, sumber data dari RTC (Real Time Clock) pada modul layar sentuh ELPI, dengan format ddmmyy. Jadi, 031113 berarti 3 November 2013.
• 161537 adalah data waktu pengiriman data VMS, sumber data dari RTC (Real Time Clock) pada modul layar sentuh ELPI, dengan format hhmmss. Jadi, 161537 berarti pukul 16:15:37. • *CB adalah kode paket data
Data mentah tersebut kemudian diolah di sisi server untuk dapat ditampilkan menjadi informasi yang berarti di situs web P3TKP.
Untuk koordinat, yang masih menggunakan format
dddmm.mmmmmm akan dikonversi terlebih
dahulu ke dalam format ddd.dddddd menggunakan rumus:
ddd.dddddd = ddd + (mm.mmmmmm : 60) ... (1) Hasilnya ditambah tanda minus (-) untuk lintang selatan dan bujur barat, serta tidak ditambah tanda minus (-) untuk lintang utara dan bujur timur. Contoh perhitungan:
Data mentah dari GPS: 813.621741 S, maka konversi koordinat dalam format ddd.dddddd adalah: ddd.dddddd = ddd + (mm.mmmmmm : 60) = 8 + (13,621741 : 60) = 8 + 0,2270290166667 = 8,2270290166667 = 8,22703 (pembulatan)
Karena koordinat berada di lintang selatan, maka hasil konversi tersebut menjadi -8,22703.
Gambar 8 memperlihatkan data uji coba yang di terima di sisi web server P3TKP. Data tersebut terekam oleh ELPI dan disimpan di data logger pada tanggal 3 November 2013 dan dikirim ke server secara otomatis pada tanggal 7 November 2013. Data yang ditampilkan di web P3TKP tersebut masih menggunakan format waktu 0 GMT. Sebagai contoh, data yang dilingkari garis merah adalah:
Tanggal data rekam jejak kapal: 3
November 2013
Waktu: 09:18:58 GMT
Koordinat lintang: -8,2270290166667
Koordinat bujur: 104,11624223333
Selain ke web server P3TKP, data rekam jejak kapal juga terkirim ke web server VMS offline yang dikelola oleh Ditjen PSDKP-KKP. Hasilnya bisa dilihat pada Gambar 9.
Gambar 9 memperlihatkan data rekam jejak kapal yang dikirimkan ke server VMS offline PSDKP.
Gambar 9. Tampilan data ELPI di server PSDKP pada pengujian di PPN Palabuhan Ratu
Figure 9. Display of ELPI data in PSDKP server from the trial at PPN Palabuhan Ratu Data yang dikirimkan oleh alat ELPI ke web server
PSDKP merupakan data yang juga dikirimkan ke server P3TKP yang ditunjukkan pada Gambar 7 dan Gambar 8. Terdapat perbedaan sedikit antara data yang ditampilkan di web P3TKP dan web PSDKP. Di web PSDKP, format waktu yang digunakan adalah +7 GMT (Waktu Indonesia Barat).
Selain itu, hasil konversi koordinat GPS dibulatkan 5 desimal. Sebagai contoh, data yang dilingkari garis merah adalah:
Tanggal data rekam jejak kapal: 3
November 2013
Waktu: 16:18:58 WIB
Koordinat lintang: -8,22703
Koordinat bujur: 104,11624
Keberhasilan integrasi data rekam jejak kapal dari ELPI ke dalam sistem VMS offline yang ada di PSDKP dapat diketahui dengan terlihatnya data yang dikirimkan oleh ELPI ke dalam sistem VMS
offline melalui server yang ada.
Selain pengiriman data rekam jejak kapal, pengiriman data hasil tangkapan sesuai dengan daftar yang termuat dalam log book penangkapan
ikan manual dilakukan melalui integrasi kedua server, yakni server P3TKP dan VMS yang ada di PSDKP. Hasil integrasi ini dapat digunakan untuk validasi data hasil penangkapan ikan, sehingga membantu proses pengelolaan sumber daya perikanan yang berkelanjutan.
Dengan terintegrasinya kedua sistem ini,
diharapkan dapat memperkuat pengumpulan data rekam jejak kapal perikanan dengan data hasil tangkapan ikan, sehingga dapat membantu proses
pengelolaan sumber daya perikanan yang
berkelanjutan.
KESIMPULAN
1. Sistem ELPI selain berfungsi sebagai log
book penangkapan ikan secara elektronik
dapat berfungsi sekaligus untuk pemantauan kapal perikanan dengan mengintegrasikan ke dalam VMS yang dikelola Ditjen PSDKP.
2. Dengan proses integrasi tersebut, data rekam
jejak kapal yang dihasilkan ELPI dapat ditampilkan di web server PSDKP.
3. Data yang ditampilkan di web P3TKP
sedangkan data yang ditampilkan di web PSDKP menggunakan format waktu +7 GMT (Waktu Indonesia Barat).
4. Dengan terintegrasinya kedua sistem ini,
diharapkan dapat memperkuat pengumpulan data rekam jejak kapal perikanan dengan data
hasil tangkapan ikan, sehingga dapat
membantu proses pengelolaan sumber daya perikanan yang berkelanjutan.
UCAPAN TERIMA KASIH
Ucapan terima kasih kami sampaikan kepada Pusat Pengkajian dan Perekayasaan Teknologi Kelautan dan Perikanan (P3TKP), Balitbang KP, KKP atas dukungan dananya sehingga penelitian ini dapat terselesaikan dengan baik, serta kepada Direktorat Pemantauan Sumber Daya Kelautan dan Perikanan dan Pengembangan Infrastruktur Pengawasan, Ditjen
PSDKP, KKP atas kerjasamanya dalam membantu proses integrasi ELPI dengan VMS.
DAFTAR PUSTAKA
Direktorat Jenderal Pengawasan Sumber Daya Kelautan dan Perikanan. (2012). Prosedur
standar VMS online. Jakarta:Kementerian
Kelautan dan Perikanan.
Gallaher, R. (2002). Fishing vessel monitoring:
The what, why, and how. Paper presented in:
Sub-Regional Fisheries Commission
Workshop on Vessel Monitoring System.
Saly, Senegal, 14-17 October 2002.
ftp://ftp.fao.org/docrep/fao/005/y4447e/y444 7e01.pdf. Diakses 15 November 2013.
Kusuma, L.P.A.S.C. (2009). VMS dalam
pengelolaan sumberdaya perikanan: Konsep
dan penggunaannya. VMS dalam
pengelolaan sumberdaya perikanan. Jakarta:
Pusat Riset Teknologi Kelautan. Pp. 35-47. Marzuki, M.I. (2011). Membangun elektronik
logbook perikanan untuk menunjang
pengelolaan sumber daya ikan yang
berkelanjutan. Bunga rampai: Application of
sustainable development technology in Indonesia. Jakarta: Pusat Pengkajian dan
Perekayasaan Teknologi Kelautan dan
Perikanan. Pp. 53-59.
Republik Indonesia. (2007). Peraturan Menteri
Kelautan dan Perikanan nomor
PER.5/MEN/2007 tentang penyelenggaraan sistem pemantauan kapal perikanan.
Jakarta.
Republik Indonesia. (2010). Peraturan Menteri
Kelautan dan Perikanan nomor PER.18/MEN/2010 tentang log book penangkapan ikan. Jakarta.
Republik Indonesia. (2012). Keputusan Menteri
Kelautan dan Perikanan nomor
PER.50/MEN/2012 tentang rencana aksi nasional pencegahan dan penanggulangan illegal, unreported, and unregulated fishing tahun 2012-2016. Jakarta.
Republik Indonesia. (2013). Peraturan Menteri
Kelautan dan Perikanan Nomor 10/PERMEN-KP/2013 tentang sistem pemantauan kapal perikanan. Jakarta.
TEKNOLOGI BUOY UNTUK OBSERVASI IN-SITU PERAIRAN SEKITAR RUMPON
THE BUOY TECHNOLOGY FOR IN-SITU OBSERVATION OF WATER PARAMETER AROUND
FISH AGGREGATING DEVICE
Handy Chandra
Pusat Pengkajian dan Perekayasaan Teknologi Kelautan dan Perikanan (P3TKP) Badan Penelitian dan Pengembangan KP, KKP. Jl. Pasir Putih 1, Ancol, 14430, Indonesia
e-mail: [email protected]
Diterima tanggal: 21 Juli 2014, diterima setelah perbaikan: 7 November 2014, disetujui tanggal: 2 Desember 2014
ABSTRAK
Aplikasi pemanfaatan buoy PLUTO sudah berhasil diujikan di perairan budidaya rumput laut (Wakatobi) tahun 2010, tambak (Pekalongan), muara pelabuhan perikanan Pekalongan dan keramba jaring apung Tuna di Wakatobi (2013). Pada tulisan ini dilakukan kajian secara teknis dan teoritis untuk ditempatkan di perairan sekitar rumpon. Paper ini mencoba menilai aspek teknologi observasi in-situ dengan memanfaatkan buoy untuk memahami relasi penangkapan ikan di sekitar rumpon dengan parameter lingkungan perairan. Menurut literatur kajian ini masih jarang dilakukan dan mungkin belum pernah dilakukan, khususnya untuk pemantauan perairan sekitar rumpon dengan data secara menerus. Hasilnya adalah buoy perlu dilengkapi dengan sensor suhu, salinitas, oksigen terlarut, keasaman, klorofil-a, dan arus. Pemasangan pada rumpon cukup diikat saja, dan tidak mengubah perilaku dan kebiasaan nelayan dalam memasang rumpon.
Kata kunci: rumpon, suhu, salinitas, oksigen terlarut, keasaman, dan klorofil-a.
ABSTRACT
PLUTO buoy has already been tested in seaweed culture area (Wakatobi) in 2010, pond (Pekalongan), fishing port estuary in Pekalongan and Tuna sea cage in Wakatobi (2013). This paper describes technical and theoritical aspect to install buoy in waters around FAD (fish aggregating device). The technology of in-situ observation for undertanding relationship of fishing catch around FAD with water parameter measurement was assessed. According to references, this study is rarely conducted and probably never been done, especially with continuous data of measurement. Result showed that it need temperature, saliniity, DO, pH, chlorophyll-a and current sensors to be equipped on board. The installation of buoy is by tied it up, and do not change habits and cultures of fishermen.
Keywords: Fish Aggregating Device (FAD), temperature, salinity, DO, pH, chlorophyll-a.
PENDAHULUAN
Aplikasi pemanfaatan buoy PLUTO sudah berhasil diujikan di perairan budidaya rumput laut (Wakatobi) (Chandra, 2012), dilanjutkan dengan implementasi pada tahun 2013 di tambak
(Pekalongan), muara pelabuhan perikanan
Pekalongan dan keramba jaring apung Tuna (Wakatobi). Namun demikian, untuk aplikasi lainnya, masih belum dilakukan. Hal menarik jika aplikasi buoy PLUTO dicoba untuk diaplikasikan pada perairan-perairan lain.
Pada masa kini, penangkapan ikan lebih diarahkan untuk kepentingan konservasi serta penghematan
energi (Purbayanto et al., 2010). Karena
pertimbangan kenaikan harga bahan bakar minyak (BBM) – mulai dari Rp. 500,- pada tahun 1990-an, kemudian naik menjadi Rp. 2.500,- ; kemudian menjadi Rp.4.500,- ; lalu menjadi Rp. 6.000,- pada tahun 2012 – mengakibatkan penggunaan rumpon (FAD, fish aggregating device) semakin marak di Indonesia, dimana salah satu tujuannya adalah untuk efisiensi pemakaian solar kapal nelayan. Di Sorong (Papua Barat) pemasangan rumpon bisa
menghemat pemakaian BBM sampai 50%
Secara umum, rumpon menggunakan teknik pengendalian tingkah laku ikan melalui pemikatan (attraction) dan kemudian di tangkap (Purbayanto
et al., 2010). Rumpon, yang dikenal secara
internasional sebagai FAD (fish aggregating
device), merupakan salah satu alat bantu penangkapan yang berfungsi untuk memikat ikan agar berkumpul di suatu daerah penangkapan di lautan (Musbir, 2009; Dempster & Taquet, 2004). Lihat gambar 1, contoh sistem rumpon di laut dangkal dan gambar 2, contoh rumpon di selatan samudera Hindia, untuk laut dalam.
Gambar 1. Rumpon laut dangkal (Baskoro et al., 2011).
Figure 1.Shallow water FAD (fish aggregating device) (Baskoro et al., 2011)
Adanya ikan di sekitar rumpon menciptakan suatu arena makan dan dimakan, dimulai dengan tumbuhnya bakteri dan mikroalga ketika rumpon dipasang (Baskoro et al., 2011). Hewan-hewan kecil akan menarik ikan-ikan pelagis kecil dan
selanjutnya ikan-ikan pelagis besar akan
memangsa ikan-ikan pelagis kecil. Rumpon juga memberikan tempat untuk berlindung bagi ikan, baik berlindung dari arus yang kuat maupun dari
pemangsanya (Purbayanto et al., 2010;
Musbir, 2009). Secara teknis konstruksi rumpon umumnya terdiri dari empat (4) bagian, pertama pengapung (buoy), kedua pemikat (attractor), ketiga tali pengapung (mooring line), dan terakhir adalah pemberat (jangkar). Karena definisi rumpon
sebagai alat bantu pengumpulan ikan atau gerombolan ikan, maka terumbu karang buatan (artificial reef) dan keramba jaring apung (KJA) juga dapat dianggap sebagai rumpon (Baskoro et
al., 2011).
Gambar 2. Rumpon jenis rakit (raft) untuk laut dalam yang di jangkar (moored) (Gates et al., 1996)
Figure 2.The moored raft type of FAD for deep sea water (Gates et al , 1996)
Rumpon untuk penangkapan tuna di Samudera Atlantik menunjukkan relasi yang positif antara kelimpahan tuna dengan mikronekton dan salinitas yang rendah di sekitar pulau Martinique, Amerika Tengah (Doray et al., 2009). Lihat Gambar 3. Tuna yang bermigrasi secara temporer tidak tertarik dengan adanya FAD jika kondisi lingkungan dan
kesuburan perairan tidak mendukungnya.
Parameter yang diukur Doray et al. adalah suhu, salinitas, oksigen terlarut yang dihubungkan dengan kedalaman (depth), serta konsentrasi
Gambar 3. Lokasi Pulau Martinique, Amerika Tengah dengan logaritmik Chlorophyll-A berdasarkan data
satelit (Doray, 2009).
Figure 3.Martinique Island location, Middle America with logaritmic Chlorophyll-a based on satelite data
(Doray, 2009).
Di Indonesia, di laut Flores, Sulawesi Selatan, Musbir (2009) menggunakan parameter suhu, kecepatan arus, dan kelimpahan fitoplankton dibandingkan dengan hasil tangkapan kapal purse seine pada area rumpon. Lihat Gambar 4. Hasilnya menunjukkan korelasi positif antara jumlah hasil tangkapan dengan kelimpahan fitoplankton.
Gambar 4. Lokasi Penelitian di laut Flores Sulawesi Selatan, tentang hubungan parameter oseanografi dengan hasil tangkapan ikan di area sekitar rumpon
(Musbir, 2009).
Figure 4.The research location in Flores sea south Sulawesi, about relationship of oceanography
parameter with fish capture around FAD (Musbir, 2009).
Komposisi hasil tangkapan adalah Ikan layang 24%, Kembung 23%, Tembang 21%, Selar 13%, Tongkol 9%, lainnya 10%. Musbir (2009) juga menyatakan bahwa pada kecepatan arus di atas 0,5 m/detik sulit ditemukan ikan pelagis kecil sekitar rumpon. Hal ini sejalan dengan sifat-sifat tingkah laku ikan yang mencari tempat berlindung (Purbayanto et al., 2010), namun jika arus terlalu kuat maka ikan akan pergi.
Teknologi observasi laut in-situ sudah berkembang dengan baik di dunia, bahkan di Indonesia. Indonesia dan Amerika Serikat telah menempatkan puluhan TAO buoy di Samudera Pasifik dan Hindia untuk memantau dan meneliti korelasi cuaca di dunia dengan suhu permukaan samudera (Pandoe & Djamaluddin, 2009). Indonesia juga telah mengembangkan buoy untuk memantau tsunami dengan nama Ina-TEWS buoy. Lihat Gambar 5.
Gambar 5. Ina-TEWS buoy, alat pemantau tsunami
in-situ (Pandoe & Djamaluddin, 2009). Figure 5.The Ina-TEWS buoy, the in-situ tsunami
monitoring tool (Pandoe & Djamaluddin, 2009) Untuk aplikasi pemantauan perairan laut secara
in-situ, juga telah dikembangkan INAGOOS-buoy
dari Kementerian Kelautan dan Perikanan (KKP) yang bekerjasama dengan IPB tahun 2007-2009 (Mbay & Rahmania, 2010). Kesulitan utama pemantauan in-situ dengan menggunakan buoy adalah vandalisme dan kegagalan rekayasa (bocor
dan patah) yang dialami Ina-TEWS buoy dan INAGOOS buoy.
Belajar dari pengalaman-pengalaman tersebut di atas, telah dikembangkan buoy PLUTO, oleh Pusat Pengkajian dan Perekayasaan Teknologi Kelautan dan Perikanan (P3TKP) – Badan Litbang Kelautan dan Perikanan, KKP, pada tahun 2010 untuk pemantauan kualitas perairan secara in-situ di wilayah budidaya rumput laut di Wakatobi, Sulawesi Tenggara (Chandra, 2012). Lihat Gambar 6. Hasilnya berupa data menerus (continue) selama 7 bulan dengan parameter suhu, salinitas, oksigen terlarut (DO) dan tingkat keasaman (pH). Lihat Gambar 7. Buoy PLUTO generasi pertama ini belum memiliki sistem telemetri, sehingga data harus diunggah secara manual memakai USB yang dikoneksikan ke laptop.
Gambar 6. Buoy PLUTO (Perairan Selalu Termonitor) di Wakatobi (Chandra, 2012).
Figure 6.Buoy PLUTO (stands for: Perairan selaLU termoniTOr) in Wakatobi (Chandra, 2012). Informasi ilmiah tentang hubungan antara variabel oseanografi dengan keberadaan dan kelimpahan ikan di sekitar rumpon masih sangat terbatas (Musbir, 2009). Namun, diketahui secara umum bahwa faktor oseanografi dan kesuburan perairan pasti berpengaruh terhadap jumlah ikan di sekitar rumpon (Doray et al., 2008 dalam Musbir, 2009; Doray et al., 2009). Ketersediaan teknologi observasi in-situ dan sedikit inovasi dapat menjawab permasalahan dan berusaha dicarikan solusinya, mengenai kurangnya data oseanografi di sekitar rumpon yang dinyatakan Musbir (2009).
Gambar 7. Data suhu, salinitas, DO, dan pH hasil pencatatan in-situ dari buoy PLUTO di Wakatobi
(Chandra, 2012).
Figure 7.Data temperature, salinity, DO, and pH from in-situ measurement from buoy PLUTO in Wakatobi
(Chandra, 2012).
Paper ini mencoba mengkaji/menilai (assesment)
aspek teknologi observasi in-situ dengan
memanfaatkan buoy untuk memahami relasi penangkapan ikan di sekitar rumpon (FAD) dengan parameter lingkungan perairan. Menurut Musbir (2009), masih jarang dilakukan dan mungkin
belum pernah dilakukan, khususnya untuk
pemantauan perairan sekitar rumpon dengan data secara menerus (continue).
BAHAN DAN METODE
Metode kajian dalam makalah ini adalah berupa hasil evaluasi implementasi perekayasaan buoy PLUTO pada tahun 2010 dan 2013, ditambahkan kajian referensi terkait, serta teknologi survey dan instrumentasi terkini.
Tahapan perancangan rekayasa (engineering
process) disain sistem observasi in-situ untuk
kawasan perairan sekitar rumpon adalah sebagai berikut:
1. Identifikasi masalah
2. Identifikasi kriteria dan batasan (constraint)
3. Solusi tukar pikiran kilat (brain-storming)
4. Eksplorasi tiap kemungkinan.
5. Memilih pendekatan
6. Membuat konsep/disain/prototipe.
Tahapan-tahapan di atas terus diulang selama proses desain, selanjutnya pada proses fabrikasi, sampai pada proses instalasi, demikian seterusnya
sampai tercapai produk rekayasa (generasi satu, dua, dst) yang semakin baik dan sempurna.
HASIL DAN PEMBAHASAN
Pada tahun 2013, P3TKP – Balitbang KP, KKP telah berhasil menyempurnakan buoy PLUTO, dari generasi pertama (2010) yang belum memiliki sistem telemetri, menjadi punya sistem telemetri.
Buoy PLUTO ini ditempatkan di Pekalongan (Jawa
Tengah) dan Wakatobi (Sulawesi Tenggara). Sistem telemetrinya mampu mengukur parameter suhu, salinitas, oksigen terlarut (DO), dan derajat keasaman (pH). Hasil sistem telemetri inovasi ini dapat dilihat pada Gambar 8.
3.1. Identifikasi Masalah
Identifikasi masalah dari pengukuran kualitas perairan di sekitar rumpon adalah agar dapat diperoleh data secara menerus, adalah biaya operasional kapal yang mahal dan waktu melaut yang tergantung cuaca. Selain itu, pengukuran memakai penginderaan jauh terbatas hanya suhu permukaan laut (SPL), salinitas dan klorofil-a yang juga dari permukaan laut saja, bukan di kolom air (Simbolon et al., 2013; Minnet, 2009; McClain, 2009; Lagerloef, 2009). Selanjutnya, sering juga terjadi perbedaan hasil pengukuran. Sebagai
contoh, perbedaan hasil pengukuran suhu
permukaan laut di lapangan (in-situ) dan ex-situ (citra satelit) di perairan Mentawai rata-rata
sebesar 10C pada bulan Maret dan Mei 2007
(Simbolon et al., 2013). Perbedaan ini umumnya disebabkan karena pengaruh atmosfer seperti uap air dan awan. Pengaruh awan dapat menurunkan
suhu pengukuran SPL (suhu permukaan laut)
sampai 1,50C dibandingkan suhu pengukuran
in-situ (Gaol, 2003 dalam Simbolon et al., 2013).
Telah diketahui secara umum, bahwa proses pengambilan data oleh sensor penginderaan jauh seperti citra satelit tidak akan mungkin lepas dari pengaruh awan. Semakin banyak kandungan awan, maka akan semakin kecil wilayah yang dapat dideteksi kandungan klorofil dan sebaran suhunya, demikian pula sebaliknya (Simbolon et al., 2013). Dengan penjelasan di atas, maka pengukuran
in-situ adalah mutlak diperlukan agar hasil penelitian
dapat lebih presisi dan berkualitas. Suhu yang dideteksi oleh satelit adalah suhu yang berasal dari radiasi balik pada permukaan laut (skin sea surface
temperatur), sedangkan suhu aktual kolom air
adalah suhu pada lapisan beberapa centimeter di bawah permukaan laut (bulk sea surface
temperature).
3.2. Identifikasi Kriteria dan Batasan
Untuk menyelesaikan masalah di atas adalah dengan memakai teknologi buoy, dengan kriteria sebagai berikut:
1. Memiliki sensor suhu, salinitas, DO, dan klorofil-a.
2. Memiliki pengukur arus.
3. Dapat mengirimkan data secara telemetri (on-line).
4. Disain buoy harus mobile.
5. Instalasi mudah dan tidak perlu kapal khusus.
6. Minimal beroperasi selama 1 tahun,
menyesuaikan angin monsoon, yang
membawa fenomena upwelling dan
downwelling pada bulan Juni-Agustus dan
Desember-Februari (Gordon, 2005).
3.3. Solusi Tukar Pikiran Kilat
Alternatif disain buoy yang bisa dipakai adalah
buoy Ina-TEWS, buoy INAGOOS, dan buoy
PLUTO. Dari hasil yang sudah diperoleh berupa uji lapangan dan kriteria untuk solusi masalah, maka buoy PLUTO lebih teruji, lebih mobile, dan tidak memerlukan kapal khusus untuk instalasinya,
dibanding yang lain (Chandra, 2012;
Mbay & Rahmania, 2010; Pandoe & Djamaluddin, 2009). Dengan demikian, teknologi pemantauan perairan secara in-situ dengan menggunakan buoy PLUTO yang dikembangkan P3TKP, Balitbang KP-KKP adalah solusi tukar pikiran kilat untuk masalah yang teridentifikasi diatas.
Gambar 8. Data suhu, salinitas, DO, hasil pencatatan
in-situ di Pekalongan, dengan sistem web (on-line). Figure 8. Data of temperature, salinity, DO, the result
of recording in Pekalongan, by using web system ( on-line)
3.4. Eksplorasi Tiap Kemungkinan
Pemakaian rumpon di Indonesia sudah begitu
banyak dan umum di kalangan nelayan.
Berdasarkan pengalaman penulis, nelayan di Pelabuhanratu - Jawa Barat, Pekalongan – Jawa Tengah, Bitung – Sulawesi Utara, Kendari dan Wakatobi – Sulawesi Tenggara, Makassar – Sulawesi Selatan, dan Ternate – Maluku Utara
sudah sering menggunakan rumpon untuk
memudahkan penangkapan ikan. Di Palabuhanratu, pembuatan jangkar sampai bersifat massal (lihat Gambar 9). Di Pekalongan – Jawa Tengah, rumpon memiliki pengapung yang besar dan dibawa dengan kapal ukuran 30 GT, lihat Gambar 10. Umumnya disain rumpon dapat dilihat seperti pada Gambar 1.
Secara teknis, maka rumpon dapat terbagi 4 bagian. Pertama adalah jangkar (seperti Gambar 9), kedua pengapung (seperti Gambar 10), ketiga tali atau rantai (mooring), dan terakhir adalah pemikat (attractor). Keempat bagian ini tidak dapat dipisahkan karena merupakan satu kesatuan sistem rumpon.
Gambar 9. Ukuran jangkar rumpon, dibandingkan botol aqua, di Palabuhanratu tahun 2013.
Figure 9.The achor size for FAD, compared with Aqua bottle, at Palabuhanratu, 2013.
Gambar 10. Ukuran pelampung rumpon, diatas kapal 30 GT di Pekalongan, Jawa Tengah.
Figure 10.The size of floater for FAD, onboard 30 GT fishing vessel in Pekalongan.
Josse et al. (2000) mempublikasikan hasil penelitian tentang sebaran ikan di daerah sekitar rumpon di wilayah Perancis Polinesia, terdapat 3 bagian ikan bedasarkan sebaran kedalaman. Lihat gambar 11. Penelitian ini juga menunjukkan bahwa observasi in-situ di kolom air perlu
dilakukan untuk meningkatkan pengetahuan
tingkah laku ikan. Hal ini akhirnya akan meningkatkan efisiensi penangkapan ikan, seperti terbukti hasil penelitian Josse et al. (2000) dengan hasil tangkapan nelayan di Tahiti.
Gambar 11. Sebaran ikan berdasarkan kedalaman, menggunakan echosounder SIMRAD EK500. Tipologi
penggerombolan ikan di sekitar rumpon di Tahiti, (a) “deep scaterred fish”, (b) “intermediate scaterred fish”,
(c) “shallow schooling fish” (Josse et al., 2000).
Figure 11.The fishes distribution based on depth, by using SIMRAD EK500 echosounder. Tipology of fish aggregation around FAD in Tahiti, (a)deep scaterred
fish, (b)intermediate scaterred fish, (c)shallow schooling fish (Josse et al. , 2000).
3.5. Pemilihan Pendekatan dan Disain Konsep/Prototipe
Pembuatan dan desain alat observasi in-situ perairan di sekitar rumpon memakai pendekatan
adaptif dengan penguasaan teknologi dan
kebiasaan nelayan. Pembuatan buoy PLUTO tidak mengalami perubahan besar (significant), karena hanya perlu dikait atau diikat dengan rumpon dari nelayan pada tali tambatannya (mooring line). Lihat Gambar 12.
Parameter-parameter perairan yang perlu untuk diukur terkait dengan rumpon adalah suhu (Gordon, 2005; Doray et al., 2009; Musbir, 2009; Simbolon et al., 2013), arus (Gordon, 2005; Musbir, 2009), salinitas (Gordon, 2005; Doray et
al., 2009), oksigen terlarut (DO) (Sidabutar, 2012;
Doray et al., 2009), dan klorofil a (Sidabutar, 2012; Doray et al., 2009; Simbolon et al., 2013).
Arus laut juga diketahui mempengaruhi
kelimpahan ikan di area rumpon. Ketika kecepatan arus semakin kuat akan mengharuskan ikan menggunakan energi yang besar untuk tetap berada di rumpon.
Gambar 12. Konsep teknis pengukuran parameter perairan in-situ di area rumpon, dengan memanfaatkan
buoy PLUTO.
Figure 12. The technical concept for in-situ water parameter measurement around rumpon area, by using
buoy PLUTO.
Oleh karena itu, penangkapan ikan akan lebih efisien pada kondisi arus lemah. Pada kecepatan di atas 0,5 m/detik sulit ditemukan ikan pelagis kecil di sekitar rumpon (Musbir, 2009). Selain itu, arus lintas Indonesia (ITF, Indonesian Throuhflow) termasuk kencang, khususnya yang melintasi selat Makassar (Gordon, 2005).
Secara konseptual teknis, pengukuran parameter-parameter perairan di area rumpon dapat menggunakan buoy PLUTO yang dikaitkan dengan rumpon, seperti pada Gambar 12. Semua sensor dan alat untuk pengukuran parameter-parameter penting, seperti suhu, salinitas, DO, arus, dan klorofil-a dapat di tempatkan pada buoy PLUTO. Jika diperlukan, untuk akurasi yang lebih baik, dapat ditambahkan dengan sensor cuaca seperti angin, curah hujan dan suhu udara. Pengiriman data dapat dilakukan dengan menggunakan jaringan telepon GSM (contoh Simpati, XL, atau
Mentari), atau jaringan satelit (Iridium).
Pengukuran dapat dilakukan setiap 5 menit, atau 10 menit, atau 15 menit sesuai dengan kebutuhan.
Dari hasil instalasi buoy PLUTO di Pekalongan tahun 2013, menunjukkan hasil yang bagus dan memuaskan. Data yang diperoleh secara telemetri
menunjukkan penjelasan kenapa di kolam
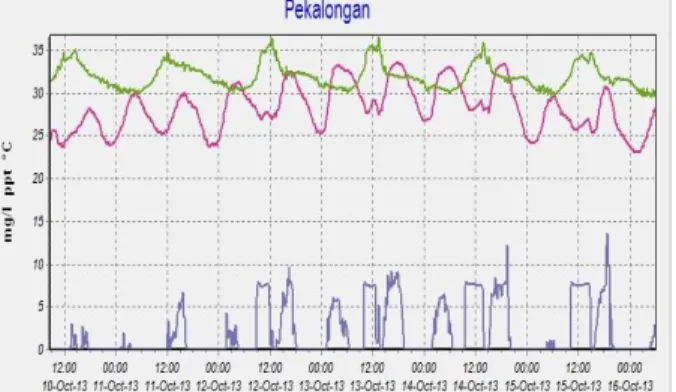
Pelabuhan Perikanan Nusantara (PPN) Pekalongan tidak ada ikan yang dapat hidup. Lihat Gambar 13.
Gambar 13. Parameter DO (warna biru), parameter salinitas (warna jingga), parameter suhu (warna hijau)
dari telemetri buoy PLUTO.
Figure 13. DO parameter (blue color), salinity parameter (violet color), temperature parameter (green
color) from buoy PLUTO’s telemetry.
Jangkar
(Anchor)
Rumpon (FAD)
Buoy PLUTO
Pengukuran menunjukkan nilai kandungan oksigen terlarut (DO) adalah nol (0), dan salinitas fluktuasinya cukup tinggi. Nilai dua parameter ini berubah saat terjadi pasang air laut, sekitar jam 12 sampai 16 di siang hari.
Data dari buoy PLUTO di Wakatobi juga menunjukkan hasil yang bagus, dimana nilai parameter-parameter perairan yang diukur relatif sama dengan yang dilakukan Tadjuddah et al.,
(2013). Nilai parameter temperatur sekitar
24-310C, salinitas 30-33 ppt, DO > 3,5 ppm, dan
nilai pH 7,8-8.
KESIMPULAN DAN SARAN
Kesimpulan
Dari hasil kajian dan perekayasaan yang sudah dilakukan, maka dapat disimpulkan hasil sebagai berikut:
a. Pengukuran paramater-parameter oseano-grafi perairan sekitar rumpon perlu dilakukan untuk meningkatakan efisiensi
penangkapan ikan berdasarkan pola
tingkah laku ikan yang menyesuaikan parameter lingkungan perairan.
b. Parameter yang dapat diukur antara lain suhu, salinitas, arus, DO, pH dan kesuburan perairan (klorofil a). Serta dapat ditambahkan sensor cuaca jika dibutuhkan. c. Teknologi buoy PLUTO adalah pilihan yang positif untuk aplikasi observasi in-situ perairan sekitar rumpon.
Saran
Saran atau rekomendasi yang dapat diberikan adalah, perlunya uji implementasi buoy PLUTO yang dapat dilakukan pada tahun 2014 dan hasilnya dapat dipakai pada tahun 2015. Dukungan institusi dan kerjasama dengan nelayan sangat menentukan keberlanjutan pemanfaatan buoy PLUTO ini.
DAFTAR PUSTAKA
Baskoro, MS, Taurusman AA, & Sudirman. (2011). Tingkah laku ikan, hubungannya
dengan ilmu dan teknologi perikanan tangkap. Bandung: CV. Luubuk Agung.
Chandra, H. (2012). Perekayasaan buoy pluto
untuk memantau kualitas perairan
budidaya rumput laut di Kabupaten Wakatobi, Sulawesi Tenggara. Jurnal
Kelautan Nasional, 7(3), 166-174.
Dempster, T., & Taquet, M. (2004). Fish aggregating device (FAD) research: gaps in current knowledge and future directions for ecological studies. Reviews in Fish
Biology and Fisheries, 14(1), 21-42.
Gates, P., Cusack, P., & Watt, P. (1996). South
Pacific Commision fish aggregating device (fad) manual. Volume II, rigging deep-water fad moorings. Copyright South
Pacific Commision 1996, Noumea, New Caledonia.
Doray, M., Petitgas, P., Nelson L., Mahévas S., Josse E., & Reynal L. (2009). The Influence of the environment on the variability of monthly tuna biomass aroung a moored, fish aggregating device. ICES
Journal of Marine Science, 66(6):
1410-1416.
Gordon, A. L. (2005). Oceanography of the Indonesian seas and their throughflow.
Oceanography, 18(4), 14-27.
Josse, E., Dagorn, L., & Bertrand, A. (2000).
Typology and behaviour of tuna
aggregations around fish agregating
devices from acoustic surveys in French
Polynesia. Aquatic Living Resources
Journal, 13, 183-192.
Lagerloef, GSE. (2009). Satellite remote sensing: salinity measurement. In J. H. Steele, S. A. Thorpe, & K. K. Turekian (Eds.),
Measurement Techniques, Platforms and Sensors. A derivative of encyclopedia of ocean sciences (2nd ed.). Academic Press, Elsevier Ltd.
Mbay, LON., & Rahmania, R. (2010). Pembuatan buoy pantai untuk mendukung kegiatan perikanan budidaya di Kepulauan Seribu.
Jurnal Kelautan Nasional, 5(3), 175-187.
McClain, CR. (2009). Satellite Remote Sensing: Ocean Colour. In J. H. Steele, S. A. Thorpe, & K. K. Turekian (Eds.),
Measurement Techniques, Platforms and Sensors. A derivative of encyclopedia of ocean sciences (2nd ed.). Academic Press, Elsevier Ltd.
Minnett, PJ. (2009). Satellite remote sensing of sea surface temperatures. In J. H. Steele, S. A. Thorpe, & K. K. Turekian (Eds.),