ROBOT PEMADAM API MENGGUNAKAN SENSOR
ULTRASONIC DAN FLAME SENSOR BERBASIS
MIKROKONTROLER ARDUINO UNO
Setyowinoto
1, Indra Gunawan
1,*1Teknik Elektro, Sekolah Tinggi Teknologi Texmaco, Jl. Raya Cipeundeuy – Pabuaran Km. 3,5
Cipeundeuy- Subang, Jawa Barat 41272. Email : [email protected]*
ABSTRACT
Robot is useful to assist humans on doing a dangerous task for example fire fighting. Therefore it is necessary to develop intelligent fire-fighting robot that can find the fire extinguisher and then extinguish the fire source. This study aims to make intelligent fire-fighting robot using a microcontroller Arduino uno / ATmega328 as a controller. The Process of finding the source of fire is made by examining each room whether there are sources of fire or not. Searching of fire is carried out by detecting ultraviolet ray-emission of fire using flame detector sensor. Fan controlled by DC motor is used to extinguish the fire. The robot moves automatically using the application of a DC motor. The robot uses Ultrasonic range finder sensors to guide the robot navigation for searching room, avoiding obstacles, detecting the direction of motion and returning robot to the starting position. The results of research show that intelligent fire-fighting robot can be made using hardware and software that controlled by microcontroller Arduino uno / ATmega328. From the testing that has been done, it can be concluded that intelligent fire-fighting robot can detect fire as far as 1 meter distance and able to extinguish the fire for average-time of 8.9 second.
Keywords : Arduino uno,ATmega328, Dc Motor, Ultrasonic, Robot, Flame Sensor
1. PENDAHULUAN
1.1 Latar Belakang
Teknologi adalah cara untuk mendapatkan sesuatu dengan kualitas lebih baik (lebih mudah, lebih cepat dan lebih menyenangkan). Salah satu teknologi yang berkembang pesat saat ini adalah teknologi dibidang kerobotan. Robot berguna untuk membantu manusia dalam melakukan pekerjaan yang memerlukan ketelitian tinggi, beresiko tinggi, membosankan atau yang membutuhkan tenaga yang besar. Menurut buku “The Robot Builder’s Bonanza” yang ditulis oleh Gordon McComb secara umum robot dapat didefinisikan sebagai piranti mekanik yang mampu melakukan pekerjaan manusia atau berprilaku sebagai manusia. Robot bermanfaat untuk membantu manusia dalam melakukan pekerjaan yang membutuhkan ketelitian tinggi, membutuhkan tenaga besar, pekerjaan yang berulang dan kotor, dan pekerjaan yang beresiko tinggi atau berbahaya. Salah satu pekerjaan manusia yang beresiko tinggi yang dapat dilakukan oleh robot adalah pemadam kebakaran. Pekerjaan pemadam kebakaran membutuhkan reaksi yang cepat karena masalah kebakaran dapat dikurangi apabila sumber api dapat ditemukan dan dipadamkan dalam waktu yang singkat.
1.2 Mikrokontroler Arduino uno
Uno Arduino adalah board berbasis mikrokontroler pada ATmega328. Board ini memiliki 14 digital input / output pin (dimana 6 pin dapat digunakansebagai output PWM), 6 input analog, 16 MHz osilator kristal,
koneksi USB, jack listrik tombol reset. Pin-pin ini berisi semua yang diperlukan untuk mendukung mikrokontroler, hanya terhubung ke komputer dengan kabel USB atau sumber tegangan bisa didapat dari adaptor AC-DC atau baterai untuk menggunakannya.
1.3 Sensor Ultrasonic
Prinsip kerja SRF04 adalah transmitter memancarkan seberkas sinyal ultrasonic (40KHz) yang bebentuk pulsatik, kemudian jika di depan SRF04 ada objek padat maka receiver akan menerima pantulan sinyal
ultrasonic tersebut. Receiver akan membaca lebar pulsa (dalam bentuk PWM) yang dipantulkan objek dan
1.4 Flame Sensor
Modul sensor yang bekerja dengan catu daya antara 3 hingga 5 Volt DC ini sensitif terhadap radiasi cahaya dari nyala api (fire flame, sensitif terhadap panjang gelombang cahaya 760 nM hingga 1100 nM yang merupakan spektrum warna dari lidah api) dengan sudut pandang ±60°, menggunakan IC pembanding tegangan (voltage comparator) LM393sebagai saklar keluaran digitalnya.
2. METODE
Pembuatan robot pemadam api dilakukan dengan cara membuat rangkaian penghubung antara modul dan komponen dengan mikrokontroler dan sistem pengendaliannya menggunakan pemrograman Arduino. Sensor yang digunakan adalah sensor api / flame detector yang dapat memberikan input ke arduino berupa sinyal yang sudah dikonversikan ke bentuk data. Untuk proses pembuatan dilakukan dengan cara merangkai satu persatu tata letak komponen.
2.1 Studi Literatur dan Diskusi
Pada tahap pertama perancangan ini penulis akan mempelajari literature yang berhubungan dengan perancangan robot pemadam api, mikrokontrol arduino uno dan komponen pendukung yang digunakan. Penulis juga berdiskusi dengan dosen dan teman untuk memperkaya wawasan penulis mengenai perancangan robot pemadam api.
2.2 Tahapan Perancangan
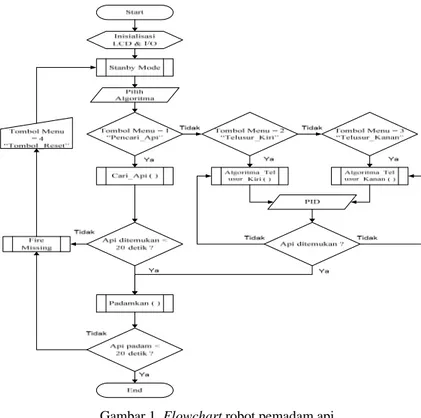
Penelitian dimulai dengan tahapan merancang flowchart cara kerja robot prototype robot pemadam api yang meliputi perancangan bentuk kerangka, penempatan motor dc, penempatan baterai, penempatan sensor dan penempatan perangkat elektronik. Konfigurasi sensor-sensor, Arduino Board dengan PC, dan motor. Membuat software untuk pengontrolan robot, respon sensor dan pergerakan putaran motor, serta penentuan arah gerak robot terhadap sumber api. Melakukan analisa dan pembahasan yang akan disesuaikan dengan hasil pengujian yang diperoleh. Hasil akhir dari penelitian ini adalah perancangan robot pemadam api dengan kendali otomatis yang dapat mendeteksi dan memadamkan sumber api.
2.3
Perancangan Sistem Algoritma Program / Software
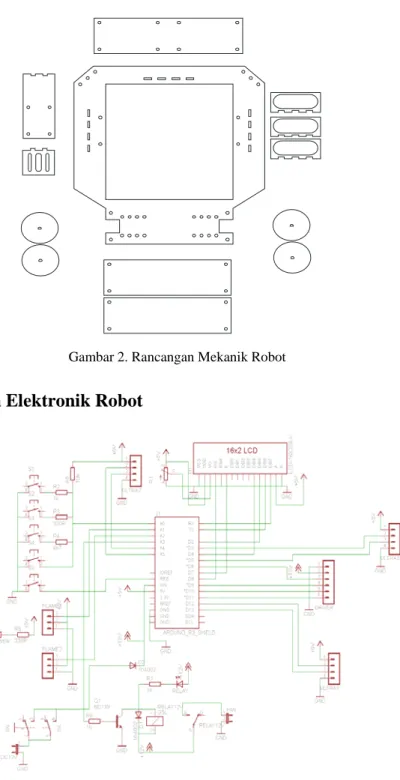
2.4 Perancangan Bentuk Fisik Robot
Gambar 2. Rancangan Mekanik Robot
2.5 Perancangan Elektronik Robot
Gambar 3. Rangkaian Sistem Robot Pemadam Api
3. HASIL DAN PEMBAHASAN
Pengujian robot mobil pemadam api dilakukan dengan tujuan untuk mengetahui kinerja robot serta performa dari sistem pergerakan robot yang telah dirancang . Pengujian ini terdiri dari beberapa tahapan, dari hasil pengujian akan dianalisa kinerja - kinerja dari tiap - tiap bagian sistem yang saling berinteraksi
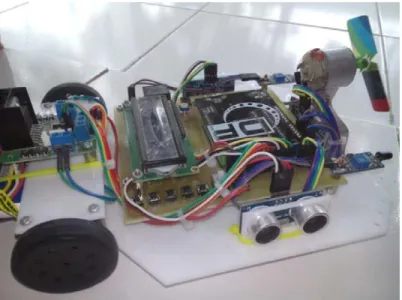
sehingga terbentuklah sistem robot beroda yang dapat mendeteksi adanya sumber api. Pengujian yang dilakukan, kinerja robot dapat mendeteksi api sejauh 80 cm dengan arena yang telah ditentukan. Hasil dari perancangan dan pembuatan robot pemadam api seperti pada Gambar 4 di bawah ini :
Gambar 4. Hasil Akhir Pembuatan Robot Pemadam Api
3.1 Pengujian Sensor Ultrasonic
Dalam pengujian ini, dilakukan akuisisi pengukuran jarak sensor ultrasonic dengan jarak sebenarnya menggunakan mistar per 10 cm sampai jarak 100 cm. Benda yang digunakan sebagai indikator jarak adalah kubus padat dan karton. Seperti pada Gambar 5 di bawah ini :
Gambar 5. Pengujian Sensor Ultrasonic
Setelah diperoleh data pengukuran, maka dianalisis error yang terjadi dengan rumus sebagai berikut :
100 % (1) Berikut data hasil analisis yang diperoleh seperti pada Tabel 1 Hasil Pengujian Perbandingan Jarak Sensor
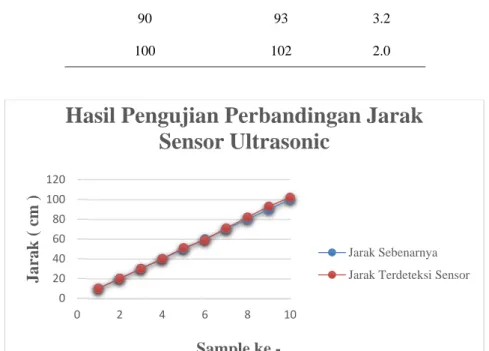
Tabel 1. Hasil Pengujian Perbandingan Jarak Sensor Ultrasonic
Gambar 6. Grafik Hasil Pengujian Perbandingan Jarak Sensor Ultrasonic
Dari hasil pengujian dapat diketahui bahwa terdapat error atau selisih antara jarak sebenarnya dengan jarak yang terukur dengan rata-rata error sebesar 0.9 % tetapi jarak yang terukur masih mendekati jarak yang sebenarnya. Selisih ini disebabkan karena adanya delay dalam program di mikrokontroler atau dari tanggapan sensor itu sendiri.
3.2 Pengujian Flame Sensor
Pengujian Flame Sensor bertujuan untuk mengetahui kepekaan sensor dalam mendeteksi api dengan jarak hingga 1 m. Flame Sensor mendeteksi gelombang ultraviolet yang berasal dari api. Pengujian Flame Sensor dilakukan dengan cara menghubungkan Flame Sensor dengan mikrokontroler yang telah diprogram dengan memakai sketch program pengujian. Hasil pengujian dapat dilihat seperti pada Tabel 2 di bawah ini :
0 20 40 60 80 100 120 0 2 4 6 8 10
Jarak
(
cm )
Sample ke
-Hasil Pengujian Perbandingan Jarak
Sensor Ultrasonic
Jarak Sebenarnya Jarak Terdeteksi Sensor
Jarak Sebenarnya ( cm ) Jarak Terdeteksi ( cm ) Error % 10 10 0.0 20 20 0.0 30 30 0.0 40 40 0.0 50 51 2.0 60 59 -1.7 70 71 1.4 80 82 2.4 90 93 3.2 100 102 2.0
Tabel 2. Hasil Pengujian Flame Sensor / Sensor Api
Jarak Sensor dengan api
(cm)
Kondisi
api Respon Sensor
10 Menyala Terdeteksi 20 Menyala Terdeteksi 30 Menyala Terdeteksi 40 Menyala Terdeteksi 50 Menyala Terdeteksi 60 Menyala Terdeteksi 70 Menyala Terdeteksi 80 Menyala Terdeteksi 90 Menyala Terdeteksi 100 Menyala Terdeteksi 110 Menyala Tidak Terdeteksi 120 Menyala Tidak Terdeteksi
Dari hasil pengujian dapat diketahui bahwa sensor api tersebut dapat mendeteksi api lilin sampai 100 cm.
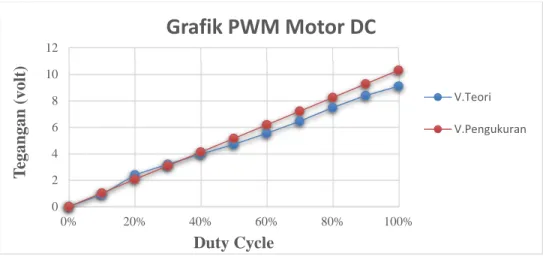
3.3 Pengujian PWM Terhadap Nilai Tegangan Output
Robot ini mempunyai beberapa aksi yang tentunya berbeda dengan kecepatan pada setiap aksinya sehingga dibuat suatu pengaturan kecepatandengan PWM (Pulse Width Modulation). Tujuan dari pengujian ini adalah untuk mengetahui perbedaan PWM dengan nilai Tegangan. Hasil pengujian seperti pada Tabel 3 di bawah ini
Tabel 3. Hasil Percobaan PWM Duty Cycle % V.Pengukuran (Volt ) V.Teori ( Volt ) Error % 0% 0 0 0 10% 0.91 1.03 13.2 20% 2.4 2.06 14.2 30% 3.2 3.09 3.4 40% 3.97 4.12 3.8 50% 4.7 5.15 9.6 60% 5.54 6.18 11.6 70% 6.45 7.21 11.8 80% 7.48 8.24 10.2 90% 8.39 9.27 10.5 100% 9.1 10.3 13.2
Gambar 7. Grafik PWM Motor DC
Pada duty cycle yang sudah di lakukan dalam percobaan, terlihat bahwa semakin besar duty cycle maka tegangan yang masuk ke motor akan semakin besar, dari data tersebut terbukti bahwa perputaran motor akan semakin cepat. Hasil rata rata Error % dari hasil pengukuran dengan teori sebesar 9.2 %
3.4 Pengujian Sistem Navigasi Robot
Pada pengujian sistem navigasi robot data diambil berdasarkan kondisi ruang arena robot. Setiap kondisi yang ada di ruangan datanya diambil dan data inilah natinya akan dijadikan sebagai referensi bagi robot untuk menentukan arah gerakan robot. Untuk menentukan belok atau tidak robot mengambil acuan dari jarak yang didapat dari sensor jarak kiri, kanan, serong kiri, serong kanan, dan sensor jarak depan. Setelah semua keadaan ini didapatkan robot akan membandingkanya dengan referensi yang telah didapatkan sebelumnya. Setelah pembandingan dilakukan barulah robot melakukan keputusan apakah hendak belok kiri, belok kanan, atau berjalan lurus.
3.5 Pengujian Sistem Pengendalian Motor DC pada Roda
Pada pengujian sistem pengendalian motor DC pada roda robot data diambil pada arena yang digunakan robot. Baik itu menggunakan metoda Left Wall Following maupun Right Wall Following pada dasarnya sama yaitu menggunakan referensi jarak robot terhadap dinding, bedanya hanya pada Left Wall Following menggunakan referensi dinding kiri dan Right Wall Following menggunakan referensi dinding kanan. Berdasarkan kondisi ruangan diambil jarak dinding terhadap robot untuk dijadikan referensi batas minimal dan batas maksimal jarak yang diperbolehkan antara robot dengan dinding kiri dan kanan.
Hasil dari pengujian didapatkan ada tiga kondisi jarak robot terhadap dinding yaitu : Jarak robot > Batas maksimal
Jarak robot berada pada range yang ditentukan Jarak robot < Batas minimal
Dari tiga keadaan itu pengendalian motor roda adalah sebagai berikut :
Kecepatan motor DC pada metode right wall following seperti pada Tabel 4 dibawah ini : Tabel 4. Kecepatan motor DC pada metode right wall following
No Jarak Robot Dengan
Dinding Kecepatan Roda
1 > batas maksimal Kiri cepat kanan lambat 2 Berada pada jarak aman Kecepatan kiri dan kanan sama 3 < batas minimal Kanan cepat kiri lambat
0 2 4 6 8 10 12 0% 20% 40% 60% 80% 100%
T
egangan (volt)
Duty Cycle
Grafik PWM Motor DC
V.Teori V.PengukuranBerikut ini adalah hasil pengamatan ketika robot pemadam api ini dijalankan dengan menggunakan metode
right wall following seperti pada Tabel 5 dibawah ini :
Tabel 5. Pengamatan ketika pengujian robot dengan metode right wall following
Jarak Robot Dengan
Dinding Kecepatan Roda Jarak Actual Error
> 7 cm Kiri 125 kanan 25 12 cm 5 Berada pada jarak = 7 cm Kiri 75 kanan 75 7 cm 0 < 7 cm Kanan 95 kiri 55 5 cm -2 Kecepatan motor DC pada metoda left wall following seperti pada Tabel 6 dibawah ini :
Tabel 6. Kecepatan motor DC pada metode left wall following
No Jarak Robot Dengan
Dinding Kecepatan Roda
1 > batas maksimal Kanan cepat kiri lambat 2 Berada pada jarak aman Kecepatan kiri dan kanan sama 3 < batas minimal Kiri cepat kanan lambat
Berikut ini adalah hasil pengamatan ketika robot pemadam api ini dijalankan dengan menggunakan metode
left wall following seperti pada Tabel 7 dibawah ini :
Tabel 7. Pengamatan ketika pengujian robot dengan metode left wall following
Jarak Robot Dengan Dinding Kecepatan Roda Jarak Actual Error
> 7 cm Kiri 125 kanan 25 12 cm 5 Berada pada jarak = 7 cm Kiri 75 kanan 75 7 cm 0 < 7 cm Kanan 95 kiri 55 5 cm -2
3.6 Pengujian Mendeteksi Sumber Api/lilin serta Mendapatkan Posisi Lilin
Berdasarkan output dari sensor api, apabila di suatu ruangan terdapat sumber api maka robot akan melakukan scaning untuk mendapatkan posisi lilin. Pada saat scaning bila intensitas infra merah yang didapatkan kedua sensor infra merah telah sama berarti robot telah menghadap persis di depan lilin. Setelah didapatkan posisi lilin maka robot baru akan bergerak mendekati lilin dengan navigasi dari 2 buah sensor infra merah.
Dan berikut tabel 8 data untuk waktu yang dibutuhkan robot untuk memadamkan api lilin dengan radius 80 cm.
Tabel 8. Data Pemadaman Api Lilin Percobaan ke- Waktu ( detik )
1 8.2 2 9.4 3 7.82 4 10.3 5 9.1
Waktu rata-rata yang dibutuhkan oleh robot untuk memadamkan api lilin sebesar 8.9 detik.
4. KESIMPULAN
Dari hasil perancangan robot yang telah di lakukan dapat di simpulkan bahwa:
1. Dengan menggunakan sensor ultrasonic pada robot salah satu keuntungannya adalah tidak perlu adanya garis penuntun atau suatu tanda khusus sebagai arahan bagi robot.
2 Penempatan sensor api/flame sensor sangat berpengaruh terhadap sensitivitas dan respon terhadap letak sumber api.
3. Pada duty cycle yang sudah di lakukan dalam percobaan, terlihat bahwa semakin besar duty cycle
maka tegangan yang masuk ke motor akan semakin besar, dari data tersebut terbukti bahwa perputaran motor akan semakin cepat.
4. Penggunaan perhitungan PID pada teknik wall following sangat baik karena robot selalu berada pada
set point yang diinginkan.
5. Dengan adanya fasilitas 3 pilihan mode robot, maka robot dapat digunakan pada beberapa aplikasi tertentu.
6. Robot pemadam api ini dibuat sebagai gambaran alat simulasi yang berfungsi untuk memudahkan pekerjaan manusia terutama dalam bidang pemadam kebakaran.
5. DAFTAR PUSTAKA
1. Suryono, A. (2010). Pembuatan Robot Beroda Pemadam Api Menggunakan Navigasi Ping)))
Ultrasonic Range Finder dan Magnetic Compass (cmps03). Politeknik Negeri Jember : Jember
2. Parallax Inc.. (2006). PING TM Ultrasonic Distance Sensor (280105) • v1.3. Available at : www.parallax.com (27 Desember 2010)
3. ST Microelectronic. (2000). Dual Full Bridge Driver L298. Datasheet Archive. Italy. 4 Fahmizal. (2010). Teori Wall Follower. Available at : http://fahmizaleeits.wordpress.com (2
Desember 2014)
5. Budhiarto, W. (2004). Interfacing Komputer dan Mikrokontroller. Jakarta: Elex Media Komputindo 6. Budhiarto, W. (2006). Belajar Sendiri Membuat Robot Cerdas. Jakarta: Elex Media Komputindo 7. Banzi, M. (2008). Getting Started With Arduino. USA: O’Reilly Media, Inc.