Universitas Sumatera Utara
BAB 3 SISTEM PERANCANGAN
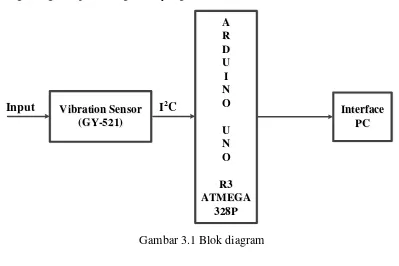
3.1 Diagram Blok Rangkaian
Dalam bab ini akan dibahas mengenai perancangan dan pembuatan
perangkat keras serta perangkat lunak pendukungnya. Rangkaian yang digunakan
terdiri dari vibration sensor, jumper dan arduino uno. Perancangan dan pembuatan
rangkaian vibration sensor beserta pendukungnya.
Ketika ada getaran maka sensor vibrasi yang telah terhubung dengan
Arduino UNO akan menampilkan nilai getaran berupa nilai Acccelerometer pada
sudut X yang nantina akan ditampilkan di PC. Alat ini juga berfungsi untuk
menghitung kecepata dari getaran yang dihasilkan Accelerometer.
Vibration Sensor
Gambar 3.1 Blok diagram
Fungsi Tiap Blok :
1. Blok Vibration Sensor : Sebagai pengukur percepatan getaran dari mems
2. Blok Arduino UNO R3 : Mengolah data dari sensor
3. Blok Interface PC :Sebagai media untuk melihat data yang telah di
diolah dari sensor
32
Universitas Sumatera Utara 3.2 Flowchart
Integrator percepatan (Kecepatan X)
Integrator percepatan (Kecepatan X)
Dapatkan data MEMS accelerometer X
Dapatkan data MEMS accelerometer X
MULAI
MULAI
INISIALISASI
INISIALISASI
Amplitudo Kecepatan X vX > maksvX maksvX = vX
Amplitudo Kecepatan X vX > maksvX maksvX = vX
Amplitudo Kecepatan X vX > maksvX maksvX = abs (vX)
Amplitudo Kecepatan X vX > maksvX maksvX = abs (vX)
YA Cetak
maksvX = abs(vX)
Cetak maksvX = abs(vX)
TIDAK
LOOP SELESAI ?
LOOP SELESAI ?
YA
TIDAK
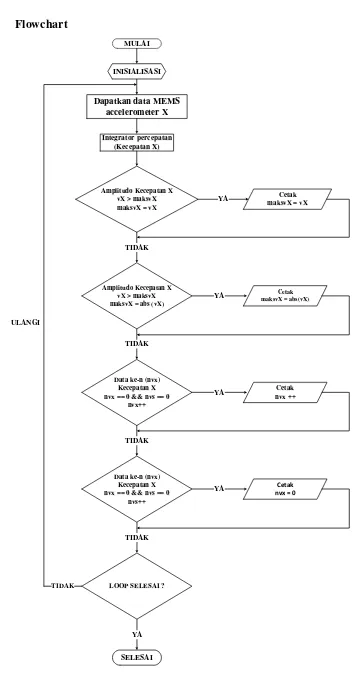
Gambar 3.2 Diagram rangkaian program
33
Universitas Sumatera Utara
Berikut ini merupakan penjelasan dari gambar 3.2 diagram rangkaian diatas :
1. Program ini dirancang untuk menginisialisasi setiap port yang digunakan, inisialisasi
port ini berfungsi untuk mengatur pin-pin input dan output Arduino yang digunakan
dalam rangkaian.
2. Baca Sensor Getaran dengan menggunakan protocol I2C.
3. Baca nilai percepatan dari MEMS Accelerometer di sudut X. dari nilai
Accelerometer yang telah didapat diambil sebanyak 500 data.
4. Dihitung nilai Amplitudo Acceleration di X, jika ax > maksaX maka maksaX = ax
tapi jika -ax > maksaX maka maksaX = abs (ax).
5. Cari data ke-n mulai dari Accelerometer positif dan berhenti ketika Accelerometer
bernilai negative untuk menghitung panjang ½ gelombang. Program akan mulai
menghitung dimulai ketika Acceleration bernilai positif (ncx == 0) dan berhenti
ketika bernilai negative (ncs == 0). Ketika Acceleration bernilai positif maka jumlah
ncx yang bernilai positif akan dihitung sedangkan ketika nilainya negaif makan ncx
yang ditampilkan bernilai 0.
6. Cari Kecepatan dengan cara menghitung integrator dari percepatan (Acceleration).
7. Dihitung nilai Amplitudo Kecepatan di X, jika vX > maksvX maka maksvX = vX
tapi jika -vX > maksvX maka maksvX = abs (vX).
8. Cari data ke-n mulai dari Kecepatan yang bernilai positif dan berhenti ketika
Kecepatan bernilai negative untuk menghitung panjang ½ gelombang. Program akan
mulai menghitung dimulai ketika Kecepatan bernilai positif (nvx == 0) dan berhenti
ketika bernilai negative (nvs == 0). Ketika Kecepatan bernilai positif maka jumlah
nvx yang bernilai positif akan dihitung sedangkan ketika nilainya negaif makan nvx
yang ditampilkan bernilai 0.
9. Setelah program dan pengiriman data dilakukan maka program akan diulangi
kembali (3-8).
10.Selesai.
34
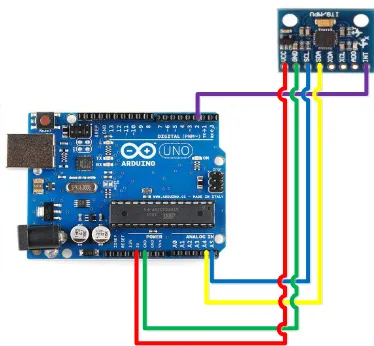
Universitas Sumatera Utara 3.3 Skematik Perancangan Accelerometer dengan Arduino UNO R3
Konfigurasi pin pada Arduino UNO R3 ATMEGA 328P dan sensor vibrasi GY-521
dapat dilihat pada gambar dibawah ini :
Gambar 3.3 Konfigurasi Pin pada Arduino UNO dan GY-521
Merakit rangkaian antara board Arduino dan Sensor GY-521 :
(hubungkan berdasarkan pin yang disebutkan pada point-point dibawah)
• Pin VCC (GY-521) ke pin 5 V (Arduino).
• Pin GND (GY-521) ke pin GND (Arduino).
• Pin SCL (GY-521) ke pin A5 (SCL pada Arduino)*.
• Pin SDA (GY-521) ke pin A4 (SDA pada Arduino)*.
• Pin INT (GY-521) ke pin D2 (Arduino).
35
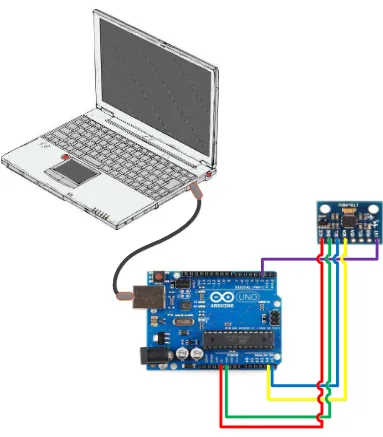
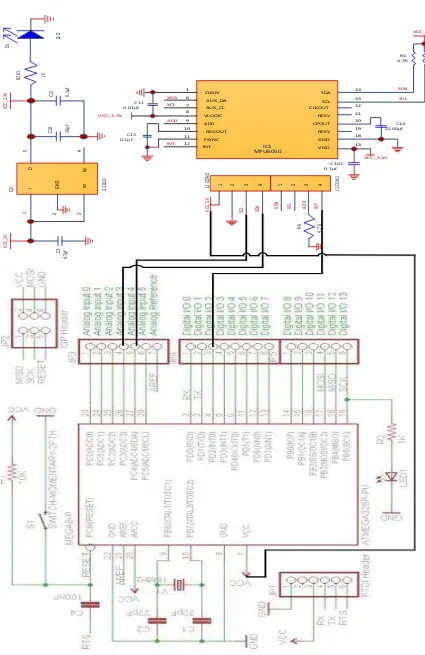
Universitas Sumatera Utara 3.4 Skematik Perancangan Sistem Keseluruhan
Gambar 3.4Rangkaian Sistem Keseluruhan
Pada kondisi terguncang sensor getaran akan berfungsi untuk menghitung
percepatan, kecepatan dan Amplitudo. Data yang dikirimkan berupa data percepatan
dengan nilai integer, sensor rmodul accelerometer MPU-6050 menggunakan jalur
komunikasi data I2C ( Inter Integrated Circuit ).
36
Universitas Sumatera Utara
CLKIN
Gambar 3.5Rangkaian Skematik Arduino UNO dan GY 521
Universitas Sumatera Utara
BAB 4 PENGUJIAN DAN ANALISIS
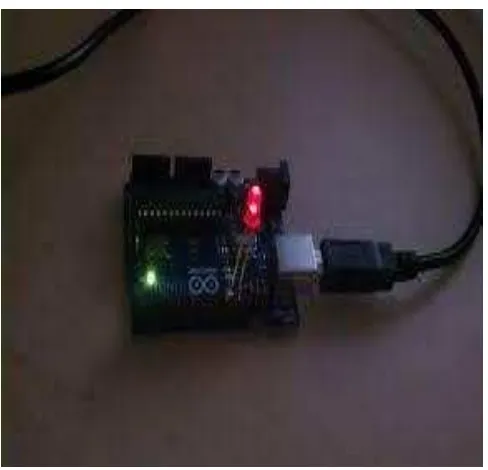
4.1 Pengujian Arduino
Tujuan pengujian ini untuk mengetahui apakah Arduino UNO bisa bekerja atau
tidak. Pengujian ini dilakukan dengan memprogram ke Arduino UNO dengan
menggunakan perintah Blink Tes. Jika lampu LED pada mikrokontroller berkelip
maka mikrokontroller sudah dapat digunakan dan berfungsi dengan baik. Apabila
Blink Tes berhasil, dapat dilihat dari gambar 4.1 dibawah ini :
Gambar 4.1 Blink Tes
Universitas Sumatera Utara
38
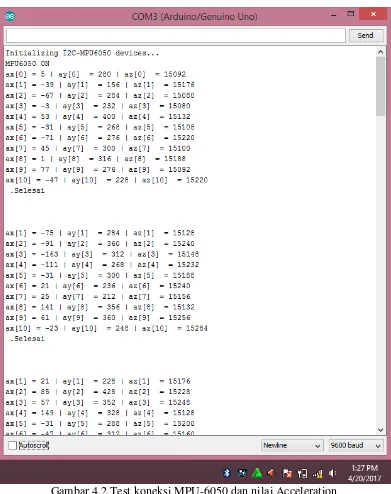
4.2 Pengujian MEMS Accelerometer MPU-6050
Tujuan pengujian ini untuk mengetahui apakah Sensr Vibrasi GY 521 yang
didalamnya terdapat MEMS Accelerometer MPU-6050 sudah terkoneksi atau tidak.
Pengujian ini dilakukan dengan memprogram ke Arduino UNO dengan memprogram
MPU-6050 ke Arduino UNO. Jika mems sudah terkoneksi maka pada output akan
ditampilkan bahwa MPU-6050 ON dan jika tidak akan ditampilkan MPU-6050 OFF.
Tes koneksi akan ditampilkan pada gambar 4.2 seperti berikut :
Gambar 4.2 Test koneksi MPU-6050 dan nilai Acceleration
Universitas Sumatera Utara
39
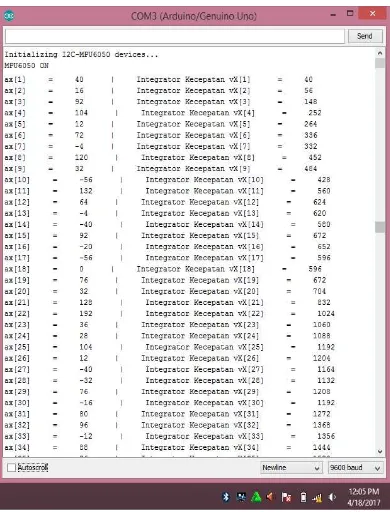
4.3 Pengujian Sistem Keseluruhan
Pengujian sistem dilakukan dengan cara memprogram sistem kemudian di
upload. Apabila program yang di upload berhasil maka diprogram langsung ke
arduino. Pengujian Sistem tersebut adalah sebagai berikut:
Gambar 4.3 Nilai Accelerometer X dan Kecepatan X
Universitas Sumatera Utara
40
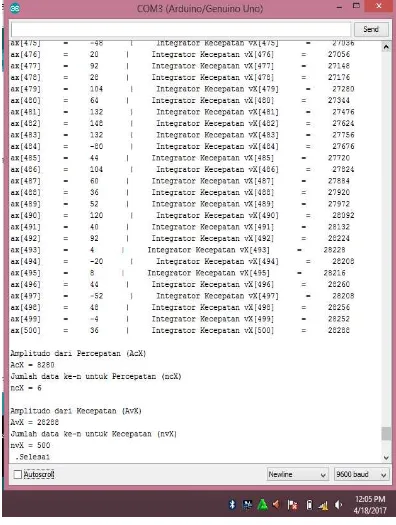
Gambar 4.4 Nilai Amplitudo dan Data ke-n
Universitas Sumatera Utara
41
Pengujian keseluruhan ini dilakukan dengan 3x data pengujian sebagai berikut :
I. Pengujian I dilakukan ketika adanya getaran Handphone disekitar sistem. Berikut
data yang diambil dari pengujian ini :
(data rinci ditampilkan pada lampiran hal. 56 )
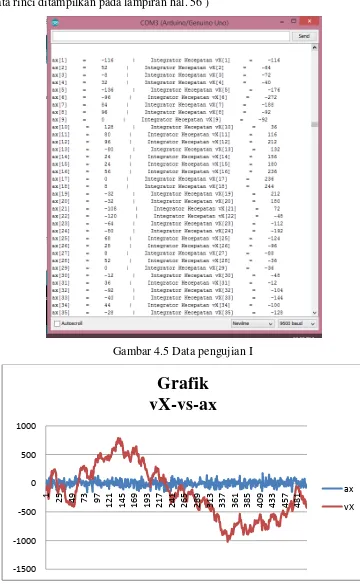
Gambar 4.5 Data pengujian I
Gambar 4.6 Grafik hubungan vX-vs-ax dari pengujian I -1500
-1000 -500 0 500 1000
1 25 49 73 97
121 145 169 193 217 241 265 289 313 337 361 385 409 433 457 481
Grafik
vX-vs-ax
ax
vX
Universitas Sumatera Utara
42 Analisa Data :
Untuk besaran Amplitudo dari Kecepatan, data yang diambil dari
vX[139] sampai dengan vX[143].
(terdapat data pada lampiran hal. 56 )
A(vx) = (788 + 756 + 760 + 692 + 780) / 5
= 3776 / 5
= 755,2
Untuk nilai frekuensi diambil dari rentang data vX[63] sampai dengan
vX[230].
(keterangan gambar 4.6 data dapat dilihat pada lampiran hal.54-58 )
Ts = 0,01 sekon
N = 168 data
Maka, f1 =
1
2 �����
= 1
2 � 0,01 � 168
= 1
3.36 = 0,297 Hz
II. Pengujian II dilakukan ketika adanya getaran Aerator disekitar sistem. Berikut
data yang diambil dari pengujian ini :
(data rinci ditampilkan pada lampiran hal.58-59 )
Gambar 4.7 Data pengujian II
Universitas Sumatera Utara
43
Gambar 4.8 Grafik hubungan vX-vs-ax dari pengujian II
Analisa Data :
Untuk besaran Amplitudo dari Kecepatan, data yang diambil dari
vX[237] sampai dengan vX[251]
(terdapat data pada lampiran hal.58-59 )
A(vx) = (452 + 456 + 440 + 376 + 388 + 292 + 256 + 352 + 368 +
(keterangan gambar 4.8 data dapat dilihat pada lampiran hal.58-59)
Ts = 0,01 sekon
121 145 169 193 217 241 265 289 313 337 361 385 409 433 457 481
Grafik
vX-vs-ax
ax
vX
Universitas Sumatera Utara
44
III. Pengujian III dilakukan ketika adanya getaran Kipas disekitar system. Berikut
data yang diambil dari pengujian ini:
(data rinci ditampilkan pada lampiran hal.55 )
Gambar 4.9 Data pengujian III
Gambar 4.10 Grafik hubungan vX-vs-ax dari pengujian III -1000
-800 -600 -400 -200 0 200 400 600 800
1 25 49 73 97
121 145 169 193 217 241 265 289 313 337 361 385 409 433 457 481
Grafik
vX-vs-ax
ax
vX
Universitas Sumatera Utara
45 Analisa Data :
Untuk nilai besaran Amplitudo dari Kecepatan, data yang diambil dari
vX[79] sampai dengan vX[89]
(terdapat data pada lampiran hal.55)
A(vx) = (528+528+468+376+448+428+488+412+452+500++536)/10
= 5164 / 10
= 516,4
Untuk nilai frekuensi diambil dari rentang data vX[68] sampai dengan
vX[106].
(keterangan gambar 4.10 data dapat dilihat pada lampiran hal.54-55)
Ts = 0,01 sekon
N = 39 data
Maka, f3 =
1
2 �����
= 1
2 � 0,01 � 39
= 1
0,78 = 1,282 Hz
Universitas Sumatera Utara 46
BAB 5 KESIMPULAN DAN SARAN
5.1 Kesimpulan
Dalam perancangan dan pembuatan perangkat simulasi untuk mendeteksi akan
terjadinya gempa dapat diperoleh beberapa kesimpulan yang bisa digunakan sebagai
pertimbangan kedepan,yaitu antara lain:
1. Sensor Vibrasi (Vibration Sensor) mampu merepresentasikan gejala seismik,
dan mengukur getaran tanah sehingga dipakai seismometer dimana pada
pengujian I besaran amplitude sebesar 755.2, pengujian II dengan besaran
amplitude sebesar 367.2, pengujian III dengan besaran amplitude sebesar
367.2 berdasarkan data digital pembacaan sensor yang didapat.
2. Sistem deteksi gempa bumi berbasis vibration sensor dan mikrokontroler ini
mampu mendeteksi frekuensi rendah ( 0.1 Hz – 10 Hz ) dimana pada
pengujian I didapat nilai frekuensinya sebesar 0,297 Hz, pengujian II dengan
nilai frekuensi sebesar 0,297 Hz, Pengujian III dengan nilai frekuensi sebesar
1,282 Hz. Nilai ini adalah skala pengukuran frekuensi rendah.
5.2 Saran
Setelah melakukan penulisan ini diperoleh beberapa hal yang dapat dijadikan
saran untuk dapat dilakukan perancangan lebih lanjut, yaitu:
1. Agar dilakukan peningkatan kemampuan pada alat ini, seperti filter noise
dan anti wind-up integrator.
2. Untuk dimasa yang akan datang, agar alat ini dapat diuji di meja getar.