BAB III
PROSEDUR PERANCANGAN DAN IMPLEMENTASI
Tahapan-tahapan perancangan PML untuk robot manipulator 2-DOF dengan optimisasi algoritma genetika adalah sebagai berikut:
1. pemodelan robot manipulator,
2. perancangan PML untuk robot manipulator,
3. perancangan algoritma genetika untuk optimisasi PML, 4. dan perancangan perangkat keras PML.
III.1 Pemodelan Robot Manipulator
Ada dua tahapan dalam memodelkan sebuah robot manipulator, yaitu: model kinematika dan model dinamika. Kinematika robot adalah studi analitis pergerakan lengan robot terhadap sistem kerangka koordinat acuan yang diam/bergerak tanpa memperhatikan gaya yang menyebabkan pergerakan tersebut. Model kinematika merepresentasikan hubungan end-effector dalam ruang tiga dimensi dengan variabel sendi dalam ruang sendi. Persamaan kinematika maju mendeskripsikan posisi dan orientasi end-effector yang dinyatakan dalam posisi sendi. Sedangkan persamaan kinematika balik mendeskripsikan konfigurasi posisi sendi untuk menghasilkan posisi dan orientasi end-effector tertentu.
Dinamika robot adalah formulasi matematis yang menggambarkan tingkah laku dinamis dari manipulator dengan memperhatikan gaya yang menyebabkan pergerakan tersebut. Persamaan dinamika maju digunakan untuk menghitung nilai posisi, kecepatan dan percepatan dari setiap sendi apabila diberikan gaya/torsi pada setiap sendi. Sedangkan persamaan dinamika mundur digunakan untuk menghitung nilai gaya/torsi setiap sendi apabila diberikan posisi, kecepatan dan percepatan dari setiap sendi. Dinamika robot ini digunakan untuk simulasi pergerakan lengan robot, perancangan strategi dan algoritma kendali agar lengan robot memenuhi tanggapan serta kinerja yang diinginkan, dan mengevaluasi
Sistem robot secara garis besar terdiri dari sistem pengendali, elektronik dan mekanik. Dalam bentuk diagram blok dapat dinyatakan seperti dalam Gambar III.1 berikut ini.
Gambar III.1. Diagram sistem robot.
G(s) adalah persamaan matematika pengendali, sedangkan H(s) adalah persamaan untuk sistem robot secara fisik termasuk aktuator dan sistem elektroniknya. Komponen ri adalah masukan acuan yang dalam penerapannya dapat berupa
posisi, kecepatan, dan percepatan. Dalam fungsi waktu, nilai masukan ini dapat bervariasi dan kontinyu yang membentuk suatu konfigurasi trayektori. Komponen e adalah nilai galat antara keluaran dan masukan acuan, sedangkan u adalah keluaran dari pengendali dan y adalah fungsi gerak robot yang diharapkan selalu sama dengan acuan yang didefinisikan pada masukan ri
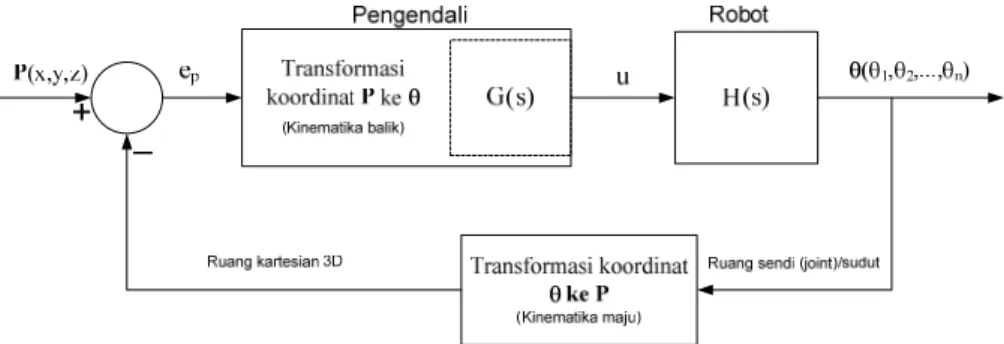
Jika masukan merupakan fungsi dari suatu kooridnat vektor posisi dan orientasi P(x,y,z) dan keluarannya adalah θ(θ1, θ1,…, θn) dimana n adalah jumlah sendi atau DOF, maka Gambar III.1 dapat digambar ulang seperti yang terlihat pada Gambar III.2 berikut ini.
Dalam Gambar III.2 di atas, keluaran yang diukur dari gerakan robot adalah dalam domain sudut dari sendi-sendi, baik sendi pada sistem tangan/kaki atau sudut dari perputaran roda jika robot tersebut adalah mobile robot. Sedangkan yang diperlukan oleh pengguna dalam pemrograman atau dalam pemetaan ruang kerja robot adalah posisi (ujung tangan atau titik tertentu pada bagian robot) yang dinyatakan sebagai koordinat 2D (kartesian) atau 3D. Dengan demikian perlu dilakukan transformasi koordinat antara ruang kartesian dengan ruang sendi/sudut ini. Pada Gambar III.2 dinyatakan sebagai kinematika balik dan kinematika maju. Kombinasi antara transformasi koordinat P ke θ dengan pengendali G(s) disebut sebagai pengendali kinematika. Masukannya berupa sinyal galat P, ep, sedangkan
keluarannya adalah sinyal kemudi u untuk aktuator. Dalam konteks praktis, u adalah sinyal-sinyal analog dari DAC untuk seluruh aktuator robot.
III.1.1 Kinematika Robot Manipulator A. Konsep Kinematika
Dari Gambar III.2, pengendali dinyatakan sebagai pengendali kinemaik karena mengandung komponen transformasi ruang kartesian ke ruang sendi. Dengan demikian diperoleh keluaran pengendali u yang bekerja dalam ruang sendi, u(θ1,
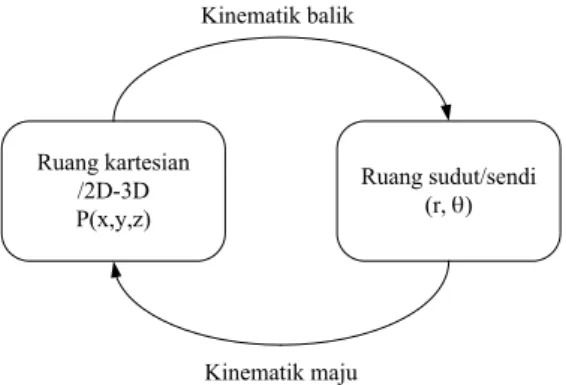
θ1,…, θn). Sebaliknya, pengendali memerlukan umpan balik dalam bentuk koordinat karena acuan diberikan dalam bentuk koordinat. Penjelasan ini dapat diilustrasikan dalam Gambar III.3 berikut ini.
Ruang kartesian /2D-3D P(x,y,z) Ruang sudut/sendi (r, ) Kinematik balik Kinematik maju
Dari Gambar III.3 dapat diperoleh dua pernyataan mendasar, yaitu:
• Jika jari-jari r dan θ dari suatu struktur robot n-DOF diketahui, maka posisi P(x,y,z) dapat dihitung. Jika θ merupakan sebuah fungsi berdasarkan waktu θ(t), maka posisi dan orientasi P(t) dapat dihitung juga secara pasti. Transformasi koordinat ini dikenal sebagai kinematika maju. • Jika posisi dan orientasi P(t) diketahui maka, θ(t) tidak langsung dapat
dihitung tanpa mendefinisikan berapa DOF struktur robot itu. Jumlah sendi n dari n-DOF yang dapat dibuat untuk melaksanakan tugas sesuai dengan posisi dan orientasi P(t) itu dapat bernilai n=(m,m+1, m+2,…,m+p) dimana m adalah jumlah sendi minimum dan p adalah jumlah sendi yang dapat ditambahkan. Robot berstruktur m-DOF disebut dengan robot nonredundant, sedang bila (m+p)-DOF maka disebut sebagai robot redundant. Transformasi ini dikenal sebagai kinematika balik.
Dari pernyataan di atas nampak bahwa analisis kinematika maju adalah relatif sederhana dan mudah diimplementasikan. Di sisi lain, karena variabel-variabel bebas pada robot yang diperlukan dalam akusisi kendali adalah berupa variabel-variabel sendi (aktuator), sedang tugas yang didefinisikan hampir selalu dalam acuan koordinat kartesian, maka analisis kinematika balik lebih sering digunakan dan dikaji secara mendalam dalam dunia robotik.
Jadi, kinematika dalam robotik adalah suatu bentuk pernyataan yang berisi tentang deskripsi matematik geometri dari suatu struktur robot. Dari persamaan kinematika dapat diperoleh hubungan antara konsep geometri ruang sendi pada robot dengan konsep koordinat yang biasa dipakai untuk menentukan kedudukan dari suatu obyek. Dengan model kinematika, programmer dapat menentukan konfigiurasi masukan acuan yang harus diumpanbalikan ke tiap aktuator agar robot dapat melakukan gerakan simultan (seluruh sendi) untuk mencapai posisi yang diinginkan. Sebaliknya, informasi kedudukan (sudut) yang dinyatakan oleh tiap sendi ketika robot sedang melakukan suatu pergerakan, dengan menggunakan analisis kinematika, programmer dapat menentukan dimana posisi ujung link atau bagian robot yang bergerak itu dalam koordinat ruang.
Model kinematika robot manipulator dapat ditentukan dengan menggunakan metoda Denavit-Hertenberg. Prinsip dasar metoda ini adalah melakukan transformasi koordinat antar dua link yang berdekatan. Hasilnya adalah suatu matrik (4x4) yang menyatakan sistem koordinat dari suatu link dengan link yang terhubung pada pangkalnya (link sebelumnya). Dalam konfigurasi serial, koodinat (ujung) link-1 dihitung berdasarkan sendi-0 atau sendi pada tubuh robot. Sistem koordinat link-2 dihitung berdasarkan posisi sendi-1 yang berada diujung link-1 dengan mengasumsikan link-1 adalah basis gerakan link-2. Demikian seterusnya, link-3 dihitung berdasarkan link-2, hingga link ke-n dihitung berdasarkan link-(n-1). Dengan cara ini maka tiap langkah perhitungan atau transformasi hanya melibatkan sistem 1-DOF saja. Terakhir, posisi koordinat lengan atau posisi ujung robot/end-effector akan dapat diketahui.
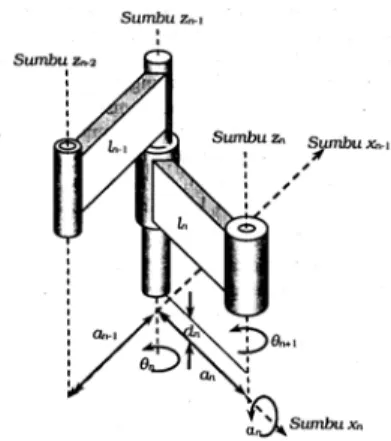
Gambar III.4 mengilustrasikan dua buah link yang terhubung secara serial. Konfigurasi hubungan dapat berupa sendi rotasi ataupun sendi translasi. Dalam hal ini, metoda Denavit-Hertenberg (DH) menggunakan 4 buah parameter, yaitu
θ, α, d dan a. Untuk robot n-DOF maka keempat parameter tersebut ditentukan hingga yang ke-n. Penjelasannya yaitu:
o θn adalah sudut putaran pada sumbu zn-1, o αn adalah sudut putaran pada sumbu xn, o dn adalah translasi pada sumbu zn-1, dan o an adalah translasi pada sumbu xn.
Dari Gambar III.4 dapat didefinisikan suatu matrik transformasi homogen yang mengandung unsur rotasi dan translasi, seperti dituliskan pada persamaan (3.1):
n-1A
Gambar III.4. Sambungan antar link dan parameternya.
Untuk link dengan konsfigurasi sendi putaran, matrik transformasi A pada sendi ke-n adalah seperti yang terlihat pada persamaan (3.2).
....(3.2) ... ... 1 0 0 0 cos sin 0 sin sin cos cos cos sin cos sin sin cos sin cos 1 ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − − = − n n n n n n n n n n n n n n n n n n n d a a A α α θ α θ α θ θ θ α θ α θ θ
Untuk konfigurasi sendi gerak translasi, nilai a adalah 0 sehingga komponen cosα=1 dan sin α=0. Selanjutnya sin θ akan ditulis S, sedangkan cos θ akan ditulis C.
Untuk robot manipulator yang memiliki n-sendi, hubungan rotasi dan translasi antara end-effector terhadap koordinat dasar dinyatakan dalam matrik link 0An
yang ditentukan dengan menggunakan aturan perkalian rantai matrik transformasi homogen seperti yang terlihat pada persamaan (3.3) berikut ini.
0A
n = 0A11A2…n-1An ..……….(3.3)
Persamaan kinematika maju yang menyatakan posisi dan orientasi end-effector terhadap posisi sendi ditentukan dengan mendekomposisi matrik link 0An untuk
menghasilkan vektor posisi end-effector 0Pn dan matrik orientasi end-effector 0Rn
...(3.4) ... ... ... ... ... ... ... ... ... 1 0 0 0 0 ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ = n n n P R A
Turunan pertama persamaan kinematika maju tersebut menghasilkan persamaan kinematika diferensial dan matrik Jacobian (JR) robot yang menyatakan
hubungan antara kecepatan end-effector v terhadap kecepatan sendi q& seperti yang terlihat pada persamaan (3.5) berikut ini.
.5) ...(3 ... ... ... ... ... ... ... ... ... ... q J v= R&
[
]
(
)
....(3.6) ... ... ... ... n jika 0 n jika x ... 1 -n 1 -n 1 -n 0 n 0 1 -n ⎪ ⎪ ⎩ ⎪ ⎪ ⎨ ⎧ = ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ = ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − = = pristmatic revolute z z P P z J J J J J n n 2 1 RB. Model Kinematika Robot Polar 2-DOF
Robot yang digunakan dalam perancangan sistem kendali ini adalah jenis robot polar 2-DOF. Berdasarkan metoda Denavit-Hertenberg, maka konfigurasi sistem koordinat sistem robot dapat dilihat pada Gambar III.5 dan parameter sistem koordinatnya dapat dilihat pada Table III.1.
1 θ
2 θ
Tabel III.1. Parameter sistem koordinat robot polar 2-DOF. Parameter Sendi-n 1 2 θn θ1 θ2 dn l1 0 an 0 l2 αn 90o 0o
Variabel sendi dan turunannya yaitu posisi sendi, kecepatan sendi, dan percepatan sendi dinyatakan dalam bentuk vektor seperti yang terlihat pada persamaan (3.7) berikut ini.
[
θ1 θ2]
T[
θ1 θ2]
T[
θ&&1 θ&&2]
T ...(3.7) && & & & = = = q q qPosisi pusat koordinat n berdasarkan sistem koordinat dasar dinyatakan dalam bentuk vektor terlihat pada persamaan (3.8) berikut ini.
[
]
[
02 01 2 2 1 2 1 2 2]
...(3.8) 1 T T S l l C S l C C l l + = = 2 1 p pPada pusat sistem koordinat n dari pusat sistem koordinat n-1 berdasarkan sistem koordinat dasar dinyatakan dalam bentuk vektor seperti pada persamaan (3.9) sebagai berikut.
[
]
[
]
...(3.9) 0 0 2 2 2 1 2 2 1 2 1 T T S l C S l C C l l = = 2 1 p pPosisi pusat massa link-n berdasarkan sistem koordinat dasar dinyatakan dalam bentuk vektor seperti pada persamaan (3.10) sebagai berikut.
[
]
[
]
...(3.10) 0 0 2 2 2 1 1 2 1 2 2 1 2 1 2 2 1 1 2 1 T T S l l C S l C C l l + = = 2 1 c cPosisi pusat massa link-n dari pusat sistem koordinat n-1 berdasarkan sistem koordinat dasar dinyatakan dalam bentuk vektor seperti pada persamaan (3.11) sebagai berikut.
[
]
[
]
...(3.11) 0 0 2 2 2 1 2 1 2 2 1 2 1 2 2 1 1 2 1 T T S l C S l C C l l = = 2 1 c cBerdasarkan persamaan (3.2) dan dengan menggunakan parameter sistem koordinat pada tabel III.1, maka diperoleh persamaan (3.12) berikut ini.
) ...(3.12 ... ... 1 0 0 0 0 1 0 0 0 0 1 0 0 0 0 1 0 0 0 0 0 2 2 2 2 2 2 2 2 2 1 1 1 1 1 1 1 0 ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − = S C l S C l S C l C S S C A A
Berdasarkan persamaan (3.3) dan persamaan (3.12) di atas, maka diperoleh persamaan (3.13) yang merupakan matrik transformasi robot polar 2-DOF.
....(3.13) ... ... ... ... ... 1 0 0 0 0 1 2 2 2 2 2 1 2 1 2 1 2 1 2 1 2 1 2 1 2 1 2 0 ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + − − − = S l l C S C S l C S S C S C C l S S C C C A
Berdasarkan persamaan (3.6), matrik jacobian robot polar 2-DOF yang merepresentasikan hubungan kecepatan ujung lengan robot dengan kecepatan sendi, seperti diperlihatkan pada persamaan (3.14) berikut ini:
) ...(3.14 ... ... ... ... ... ... ... 0 1 0 0 0 1 1 2 2 2 1 2 2 1 2 2 1 2 2 1 2 R ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − − − − = C S C l S S l C C l S C l C S l J
Persamaan kinematika balik yang menyatakan posisi sendi terhadap posisi dan orientasi ujung lengan robot adalah:
....(3.15) ... ... ... ... ... ... ... ... tan tan 2 2 1 1 2 1 1 ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ + − = ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ = − − Y X l Z X Y θ θ
III.1.2 Dinamika Robot Manipulator A. Konsep Dinamika
Robot secara fisik adalah suatu benda yang memiliki struktur tertentu dengan massa tertentu, sehingga dalam pergerakannya tunduk kepada hukum-hukum alam yang berkaitan dengan grafitasi dan atau massa/kelembaman. Jika robot berada di permukaan bumi, maka grafitasi dan massa akan mempengaruhi kualitas gerakan. Sedangkan bila robot berada di luar angkasa yang bebas grafitasi, maka massa saja yang dapat menimbulkan efek inersia/kelembaman. Setiap struktur dan massa yang berbeda akan memberikan efek inersia yang berbeda pula sehingga penanganan dalam pemberian torsi pada tiap sendi seharusnya berbeda pula.
τ (θ,θ&,θ&&)
Gambar III.6. Diagram model dinamika robot.
Perhatikan kembali Gambar III.2 sebelumnya. Jika u adalah sinyal aktuasi pada aktuator motor DC-torsi, maka masukan pada model dinamika robot dapat dinyatakan sebagai torsi τ seperti yang terlihat pada persamaan (3.16),
) ...(3.16 ... ... ... ... ... ... ... ... ... ... a aK i = τ
Seperti yang diperlihatkan pada Gambar III.6, dengan ia adalah sinyal analog (arus motor) yang dikeluarkan oleh pengendali, dan Ka adalah konstanta motor. Karena torsi pada sendi akan menghasilkan gerakan, maka keluaran (dinamika) robot dapat dinyatakan memiliki 3 komponen yang menyatu dalam fenomena gerak rotasi tiap lengan sendi, yaitu sudut θ , kecepatan sudut θ& , dan percepatan sudut
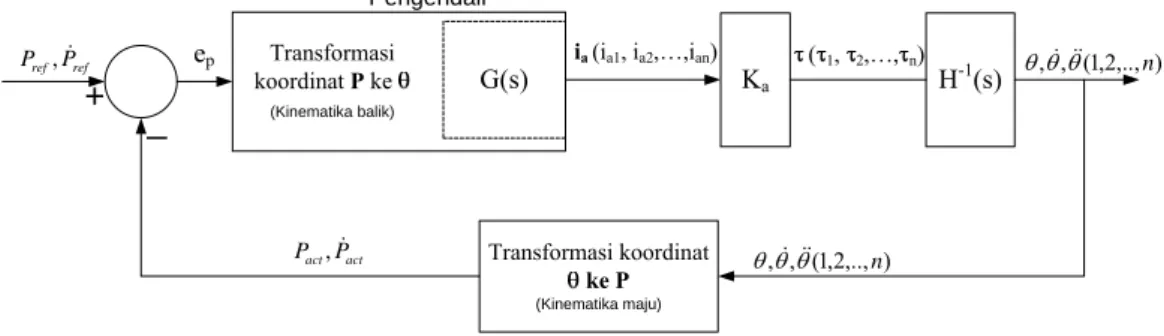
θ&&. Gambar III.7 memperlihatkan skema kendali robotik berorientasi dinamika dengan penggambaran lebih detil tentang torsi yang dihasilkan oleh aktuator.
G(s) Transformasi koordinat P ke (Kinematika balik) Transformasi koordinat ke P (Kinematika maju) Pengendali ep + _ H-1(s) Ka
ia (ia1, ia2,…,ian) (1, 2,…,n) θ,θ&,θ&&(1,2,..,n)
) ,.., 2 , 1 ( , ,θθ n θ & && act act P P ,& ref ref P P ,&
Gambar III.7. Diagram sistem kendali robot berorientasi dinamika.
Jika keluaran sistem adalah θ,θ&,θ&&(1,2,..,n) dinyatakan sebagai q, maka torsi yang diberikan kepada sendi-sendi robot adalah seperti yang terlihat pada persamaan (3.17) berikut ini. 17) ...(3. ... ... ... ... ... ... ... ... ... ... ) (q f = τ
Persamaan ini dikenal sebagai persamaan dinamika maju. Model dinamikanya dapat ditulis sebagai H(s). Sebaliknya, jika torsi τ diketahui (sebagai masukan), maka q akan diketahui dengan menggunakan dinamika balik. Model dinamikanya dinyatakan dengan H-1(s). Persamaannya adalah:
.(3.18) ... ... ... ... ... ... ... ... ... ... ) ( 1 τ − = f q
Hubungan model matematik dinamika balik dan dinamika maju dapat diilustrasikan melalui Gambar III.8 berikut ini.
τ θ,θ&,θ&&(1,2,..,n)
Gambar III.8. Transformasi dinamika balik dan dinamika maju.
Seperti lazimnya dalam persamaan matematika, solusi penyelesaian dengan memilih nilai variabel-variabel yang benar adalah diperlukan. Dengan pendekatan kendali dinamika maka sinyal aktuasi pengendali dapat lebih presisi dengan dimasukannya unsur perbaikan torsi yang sesuai dengan efek dinamika ketika robot bergerak. Jika kendali kinematika lebih berfungsi untuk menjaga kestabilan gerak, maka kendali dinamika lebih berfungsi untuk meningkatkan kekokohan terhadap gangguan yang dapat muncul selama operasi.
B. Model Dinamika Robot Polar 2-DOF
Dengan asumsi bahwa kedua link merupakan batang pipih homogen, maka tensor inersia link-n terhadap pusat massanya (persamaan (3.19)) dapat dinyatakan dalam sistem koordinat n berikut ini.
) ...(3.19 ... ... 0 0 0 0 0 0 0 0 0 0 0 0 0 0 2 2 2 121 2 2 2 121 2 2 1 1 121 2 1 1 121 1 ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ = l m l m l m l m I I
Tensor inersial link-n terhadap pusat massanya yang dinyatakan dalam sistem koordinat dasar ditentukan dengan menggunakan persamaan (3.20 ) berikut.
( )
0 n ...(3.20) n n 0 0 n T A I A I =Dengan melakukan substitusi persamaan (3.20), (3.19), dan (3.3), maka diperoleh persamaan (3.21): .21) ...(3 ... ... 2 2 2 2 1 2 2 1 2 2 1 2 1 2 2 2 1 1 1 2 2 1 1 2 2 1 1 1 2 2 1 1 2 1 2 2 2 1 2 2 2 121 0 2 ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − − − + − − − + = C C S S C S C C S S C S S C S S C S C S C C S S C S S S C l m I
Kecepatan linier dan kecepatan sudut pusat massa link n dapat dinyatakan dalam kecepatan sendi dengan menggunakan persamaan (3.22) berikut:
[
z c 0]
q v1= 0x 1 3x1 &[
z0 3 1]
q& 1 x 0 = ϖ(
)
[
z c z c p]
q v 1 2 1 & 2 0 2= x x − ……….…………(3.22)[
z0 1]
q& 2z
=
ϖ
Dengan melakukan substitusi, maka diperoleh persamaan (3.23):
3.23) ...( ... ... ... 0 1 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 1 1 1 2 2 2 1 2 1 2 2 1 2 1 2 2 1 2 1 2 2 1 2 1 2 2 1 1 q q q v q v 2 2 & & & & ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − = ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ = ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − − − = ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ = C S C l S S l C C l S C l C S l ϖ ϖ
Energi kinetik link-n yang menyatakan gabungan energi kinetik translasi dan energi kinetik rotasi ditentukan dengan menggunakan persamaan (3.24) berikut:
.(3.24) ... ... ... ... ... ... ... 0 n 2 1 n T n 2 1 n T n n n m K = v v + ϖ I ϖ
Dengan melakukan substitusi persamaan (3.24), dan (3.23), maka diperoleh persamaan (3.25) yang merupakan energi kinetik untuk kedua sendi.
...(3.25) ... ... ... ... ... ... ... 0 2 2 2 2 2 6 1 2 1 2 2 2 2 2 6 1 2 1 θ θ& m l & C l m K K + = =
Energi kinetik robot polar 2-DOF merupakan penjumlahan energi kinetik seluruh link sebagai berikut:
) ...(3.26 ... ... ... ... ... ... ... 2 2 2 2 2 6 1 2 1 2 2 2 2 2 6 1m l C θ& m l θ& K = +
Energi potensial link-n ditentukan dengan menggunakan persamaan (3.27) berikut: .27) ...(3 ... ... ... ... ... ... ... ... ... n c g n n m P =−
Dengan melakukan substitusi persamaan (3.27) dan (3.11), maka diperoleh persamaan (3.28) yang merupakan energi potensial untuk kedua sendi robot.
..(3.28) ... ... ... ... ... ... ... ... 2 2 2 2 1 1 2 2 1 1 2 1 1 S gl m gl m P gl m P + = =
3.29) ...( ... ... ... ... ... ... 2 2 2 2 1 1 2 1 1 2 1m gl m gl m gl S P= + +
Fungsi lagrangian menyatakan selisih energi kinetik dengan energi potensial sebagai berikut: ...(3.30) ... ... ... ... ... ... ... ... ... ... P K L= −
Dengan melakukan substitusi persamaan (3.30), (3.26) dan (3.29), maka diperoleh persamaan (3.31) yang merupakan fungsi lagrange robot polar 2-DOF.
.31) ...(3 ... ... 2 2 2 2 1 1 2 1 1 2 1 2 2 2 2 2 6 1 2 1 2 2 2 2 2 6 1m l C m l m gl m gl m gl S L= θ& + θ& − − −
Persamaan (3.32) merupakan dinamika balik yang menyatakan torsi sendi terhadap percepatan sendi ditentukan dengan menggunakan persamaan Laggrange-Euler sebagai berikut:
.(3.32) ... ... ... ... ... ... ... ... ... n n n q L q L dt d ∂ ∂ − ∂ ∂ = & τ
Dengan melakukan substitusi persamaan (3.32), dan (3.31), maka diperoleh torsi untuk masing-masing sendi seperti yang terlihat pada persamaan (3.33).
(3.33) ... ... ... ... ... 2 2 2 2 1 2 1 2 2 2 2 2 3 1 2 2 2 2 3 1 2 2 1 2 2 2 2 2 3 2 1 2 2 2 2 2 3 1 1 C gl m C S l m l m C S l m C l m L L + + = − = θ θ τ θ θ θ τ & && & & &&
III.1.3 Model Sistem Aktuator Motor DC
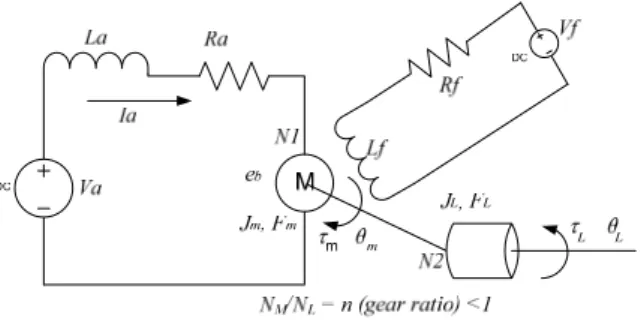
Sistem penggerak yang digunakan dalam merancang robot manipulator adalah motor DC. Pada penelitian ini, motor DC yang digunakan adalah jenis tegangan armature terkendali. Untuk jenis ini, keluaran motor DC dikendalikan oleh tegangan armature, sementara arus medan dijaga konstan. Gambar III.9 memperlihatkan diagram skematik modor DC yang digunakan.
Gambar III.9. Diagram skematik motor DC.
Torsi yang bekerja pada shaft motor (τ) berbanding lurus dengan arus armature dan konstanta motor DC, seperti yang terlihat pada persamaan (3.34).
3.34) ...( ... ... ... ... ... ... ... ... ... a ai K = τ
Sementara persamaan (3.35) merupakan tegangan armature dari motor DC. ...(3.35) ... ... ... ... ... ... ... ... b a a a a a e dt di L R i V = + + dengan n K eb b m m L θ θ θ =
= & dan , selanjutnya θLditulis menjadi θ
Sehingga diperoleh persamaan (3.36) yang merupakan torsi yang bekerja pada shaft motor. .(3.36) ... ... ... ... ... ... ... ... ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − = L a b a a a nR K R V K θ τ &
Persamaan (3.37) merupakan torsi yang digunakan untuk menggerakan motor DC. m m m m m J θ F θ τ = && + & ………..………...(3.37)
Torsi yang bekerja pada shaft motor adalah torsi yang digunakan untuk menggerakan sendi. Dengan menggunakan hukum kesetimbangan mekanik, torsi yang bekerja pada shaft motor dapat ditulis seperti yang terlihat pada persamaan (3.38) berikut ini. * L m τ τ τ = + ……….(3.38)
dengan *
L
τ adalah torsi sendi yang mengacu pada shaft motor. Dengan menggunakan persamaan dinamika sistem robot manipulator dan transmisi roda gigi, *
L
τ dapat ditulis seperti yang terlihat pada persamaan (3.39) berikut ini. L
L nτ
τ* = ……….………..(3.39)
dengan transmisi roda gigi adalah seperti yang terlihat pada persamaan (3.40).
40) ...(3. ... ... ... ... ... ... ... ... ... ... L M N N n=
NM adalah roda gigi yang terhubung dengan shaft motor, sedangkan NL adalah roda gigi yang terhubung dengan shaft sendi.
III.1.4 Model Gabungan Manipulator dan Sistem Aktuator Motor DC
Untuk memperoleh model sistem yang lengkap dari robot manipulator adalah dengan mensubstitusi persamaan (3.37), (3.38), (3.39) dan (3.40), maka diperoleh persamaan (3.41) yang merupakan persamaan dinamika balik untuk masing-masing sendi. ) 41 . 3 ( cos 2 1 cos sin 3 1 3 3 cos sin 3 2 3 3 cos 2 2 2 2 2 2 2 2 1 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 1 1 1 2 1 2 2 2 2 2 1 1 1 1 2 2 2 2 2 2 1 1 L L m L L L L m L m L L L L L m L gl m n n F l m n n J l m n n F l m n n J l m n θ θ θ θ θ θ τ θ θ θ θ θ θ θ τ + + + + = + − + = & & && & & & &&
dengan τ1 dan τ2 adalah torsi untuk sendi 1 dan sendi 2, m1 dan m2 adalah massa untuk masing-masing link, l1 dan l2 adalah panjang masing-masing link, Jm1 dan Jm2 adalah momen inersia motor Fm1 dan Fm2 adalah gaya gesek motor, θL1 dan θL2 adalah sudut pergerakan sendi dan n1 dan n2 adalah gear ratio masing-masing sendi.
Dengan mensubstitusikan persamaan (3.36), dan (3.41), maka diperoleh 1 1 1 1 1 L H BVa Dθ&& = + ………..………..…….(3.42) 2 2 2 2 2 2 L H G BVa Dθ&& = + + ………..………...(3.43)
dengan
(
)
1 1 1 2 1 2 2 2 2 2 1 1 1 1 1 1 1 1 1 1 1 2 2 2 2 2 2 1 1 cos sin 3 2 3 3 cos a a L L L L L m a b a m L R K B l m n n F R n K K H n J l m n D = + ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + − = + = θ θ θ θ θ θ & & &(
)
2 2 2 2 2 2 2 2 2 1 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 cos 2 1 cos sin 3 1 3 3 a a L L L L L m a b a m R K B gl m n G l m n n F R n K K H n J l m n D = − = − ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + − = + = θ θ θ θ θ& &Dipilih peubah statusx1=θL1;x2 =θ&L1;x3 =θL2;x4 =θ&L2. Dimana θL adalah dan θ&L posisi dan kecepatan sendi manipulator. Sementara masukan kendalinya adalah
2 2 1
1 Va ;u Va
u = = dan keluaran yang diinginkan adalah y1 =θL1;y2 =θL2. Dari
peubah status yang dipilih, maka diperoleh persamaan status non-linier robot manipulator 2 derajat kebebasan sebagai berikut:
(
)
⎥ ⎦ ⎤ ⎢ ⎣ ⎡ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − − − − 2 1 2 1 2 1 1 1 2 2 1 2 4 1 1 1 2 4 3 2 1 0 0 0 0 0 0 u u B D B D G H D x H D x x x x x & & & & ………...…(3.44) x y ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ = 0 1 0 0 0 0 0 1…..
……….……….(3.45)Parameter fisik robot yang digunakan untuk masing-masig sendi adalah sebagai berikut:
• hambatan armature (Ra)=0.2 Ω,
• konstanta proporsional (Kb)= 5,5 x 10-2 V.s/rad, • konstanta torsi motor (Ka) =6 x 10-5 Nm/A,
• koefisien gesekan motor (Fm)=0, • gear ratio (n) = 0.1, • massa sendi-1 (m1) = 3 kg, • massa sendi-2 (m2) = 1.5 kg, • panjang link-1 = 0.35 m, • panjang link-2 = 0.5 m, • gaya grafitasi = 9.8 kg m/s2.
III.2 Perancangan PML untuk Robot Manipulator
Pada penelitian ini, masukan acuannya berupa sudut putaran dan keluarannya pun berupa sudut putaran, sehingga tidak diperlukan transformasi untuk mengubah sudut putaran ke vektor posisi. Sistem kendali yang akan dirancang pada robot manipulator adalah PML. Konsep dasar pengendalian robot manipulator dengan PML diperlihatkan pada Gambar III.10 berikut ini.
S C ) ( ) , ( ) , ( ) (t f xt B xt ut x& = + ) , ( )) , ( ( 1 t x Sf t x SB − −
( )
• − f x y xr(acuan) xe + _ σ + + ueq un uGambar III.10 Konsep dasar PML pada robot manipulator.
Tujuan pengendalian pada robot manipulator ini adalah membuat status keluaran (x1=posisi sendi-1) dan (x =posisi sendi-2) mengikuti masukan acuan x3 r (x1r dan
r
x3 ), dan status lainnya (x2=kecepatan sendi-1) dan (x4=kecepatan sendi-2) menuju nol. Didefinsikan status galat dari sistem adalah seperti yang terlihat pada
persamaan (3.46) berikut ini. (3.46) ... ... ... ... ... ... ... ... ... ... 0 0 4 3 3 2 1 1 ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − − − − = x x x x x x e r r
dengan e adalah galat penjejakan status. Perancangan PML dimulai dengan merancang permukaan luncur untuk sistem yang akan dikendalikan. Berikut ini persamaan (3.47) dan (3.48) adalah permukaan luncur untuk sendi-1 dan sendi-2..
(
r)
(
x xr)
dt d x x S1 1 1 1 1 1= − + − σ r x S x x S1 1 2 1 1 1 = + − σ ……….………...(3.47)(
r)
(
x xr)
dt d x x S2 3 3 3 3 2 = − + − σ r x S x x S2 3 4 1 3 1= + −σ
………..……….……….(3.48)Sehingga matrik permukaan luncur yang diperoleh adalah seperti yang terlihat pada persamaan (3.49) berikut:
0 , 1 0 0 0 0 1 2 1 3 2 1 1 2 1 > ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ − − + ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ = S S x S x S x S S r r σ ...(3.49)
Dari persamaan (3.49) pemilihan S berkaitan dengan dinamika sistem yang akan mempengaruhi tanggapan sistem terhadap waktu. Dengan memilih S yang tepat, maka kutub-kutub pada matrik karakteristik sistem lingkar tertutup akan dapat disesuaikan dengan tujuan pengendalian.
Dengan menggunakan syarat kondisi luncur σ& =0, diperoleh masukan kendali ekivalen seperti yang dapat dilihat pada persamaan (2.8). Operasi matrik pada persamaan (2.8) akan diperoleh persamaan masukan kendali ekivalen seperti yang terlihat pada persamaan (3.50) sebagai berikut:
(
)
⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + + − + − = − − − − 2 1 2 2 2 1 2 4 2 1 1 1 1 1 1 2 1 B D G H D x S B D H D x S ueq ...(3.50)yang akan membawa status sistem menuju permukaan luncur.
Selanjutnya dirancang masukan kendali tak kontinyu un yang akan menjaga status sistem tetap berada dalam permukaan luncur/dalam kondisi luncur. Pada perancangan masukan kendali tak kontinyu seperti yang dapat dilihat pada persamaan (2.9), dipilih parameter k (penguat pensaklaran) yang sesuai untuk meminimalisasi galat penjejakan dari tanggapan sistem. Dengan menjumlahkan masukan kendali tak kontinyu un dengan masukan kendali ekivalen ueq, maka diperoleh masukan kendali total yang akan diumpanbalikan ke plant
III.3 Algoritma Genetika untuk Optimisasi
Algoritma genetika bekerja untuk mencari parameter-parameter PML agar menghasilkan kinerja pengendali sesuai dengan yang diinginkan. Parameter-parameter yang akan dioptimisasi pemilihannya adalah penguat pensaklaran k dan konstanta permukaan luncur S. Agar dapat melakukan pemilihan parameter-parameter PML dengan algoritma genetika, dipilih R={k,S} sebagai sebuah kumpulan parameter dan mengkodekanya sebagai sebuah kromosom, kemudian pilih sebuah fungsi obyektif dan fungsi kepantasan yang digunakan untuk melacak sebuah solusi terbaik dalam ruang parameter tertentu. Fungsi obyektif yang dibuat harus merepresentasikan kebutuhan perancangan sistem kendali yang diinginkan, yaitu mempercepat tanggapan waktu dari keluran status x1 dan x3 (Tr) dan mengurangi galat penjejakan dari status x1 dan x3 (e) dan memperkecil amplitudo masukan kendali u (Umax). Fungsi obyektif didefinisikan pada persamaan (3.51).
( )
( )
(
)
2 max 3 2 2 2 1 T c e c U c F= r + + ...(3.51)dimana c1, c2, c3 adalah konstanta-konstanta pengali untuk memperlihatkan prioritas optimisasi dari fungsi obyektif tersebut. Fungsi kepantasan dapat didefinisikan pada persamaan (3.52).
1 1 + = F f ...(3.52)
Fungsi obyektif perlu ditambah 1 untuk menghindari kesalahan program yang diakibatkan pembagian oleh 0. Seiring dengan mengecilnya fungsi obyektif, fungsi kepantasan akan bertambah besar sampai konvergen pada satu nilai tertentu. Hal ini merepresentasikan algoritma genetika bekerja dengan baik. Persamaan (3.53) dioperasikan untuk mencari nilai kepantasan tertinggi yang berelasi dengan solusi terbaik dalam algoritma genetika.
( )
{
f R}
MAX ...(3.53)
dimana R adalah sebuah kromosom yang merepresentasikan sebuah nilai tertentu yang berada pada ruang pelacakan P. Tiga operasi dasar algoritma genetika dapat diterapkan untuk memilih parameter-parameter {k, s1, s2} untuk meningkatkan indek kinerja PML dalam ruang pelacakan P. Jika kromosom dengan nilai kepantasan terbaik telah diperoleh, maka nilai kromosom tersebut dapat dipilih sebagai sebuah parameter penguat pensaklaran k dan konstanta permukaan luncur S dari PML.
Secara umum prosedur pemilihan parameter PML dengan algoritma genetika dapat dirumuskan sebagai berikut:
1. rumuskan parameter-parameter PML,
2. buat polulasi awal dari kromosom secara random,
3. kodekan masing-masing kromosom dalam populasi dan evaluasi kinerja dari tanggapan sistem,
4. evaluasi nilai kepantasan (“fitness”) untuk masing-masing kromosom, 5. reproduksi kromosom-kromosom tersebut berdasarkan nilai kepantasan
6. buat kromosom-kromosom baru dengan melakukan proses persilangan dan mutasi, dan mengganti kromosom yang lama dengan kromosom yang baru,
7. ulangi tahap ke-3 sampai maksimum iterasi diperoleh atau nilai kepantasan konvergen pada satu nilai tertentu.
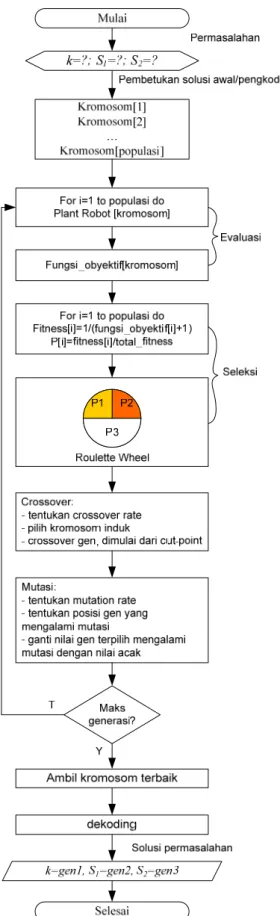
Berikut ini Gambar III.11 merupakan diagram alir proses optimisasi parameter PML dengan menggunakan algoritma genetika.
Kondisi-kondisi yang berkaitan dengan proses optimisasi ini adalah sebagai berikut:
• parameter fisik manipulator yang digunakan adalah jenis PUMA 560 yang sudah dimodifikasi,
• tidak melakukan penskalaan masukan kendali,
• tidak memperhatikan keluaran pengendali, apakah single action atau double action,
• tidak memodelkan kondisi offset dari amplifier yang ditemukan pada tahap realisasi.
III.4 Realisasi Perancangan PML
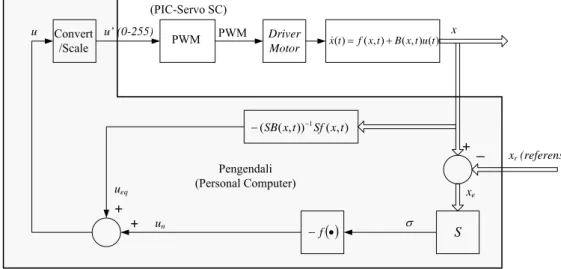
Dalam merealisasikan hasil perancangan PML ke dalam sebuah perangkat keras, diperlukan identifikasi kebutuhan perangkat keras yang akan digunakan untuk memudahkan dalam membuat skema pengendalian. Pada penelitian ini, karena penggerak robot yang digunakan adalah motor DC, maka dibutuhkan sebuah perangkat driver dan masukan sinyal dalam mengaktifkan perangkat driver tersebut. Hasil identifikasi perangkat keras dan melihat karakteristik PML dalam sebuah simulasi, maka diperoleh diagram blok realisasi perancangan PML seperti yang dapat dilihat pada Gambar III.12 di bawah ini.
u S ) ( ) , ( ) , ( ) (t f xt Bxtut x& = + ) , ( )) , ( (SB xt −1Sf xt − ( )• − f x xr(referensi) xe + _ σ + + ueq un u’ (0-255) Convert /Scale PWM Driver Motor (PIC-Servo SC) PWM Pengendali (Personal Computer)
Sinyal penggerak motor DC yang digunakan adalah sinyal PWM. Pada hasil perancangan PML, masukan kendali yang dihasilkan digunakan sebagai data untuk membangkitkan sinyal PWM. Sinyal PWM ini berfungsi untuk menggerakkan motor dalam hal ini manipulator ke posisi atau arah yang diinginkan. Sinyal PWM sendiri dibangkitkan oleh sebuah chip dalam hal ini PIC-Servo SC dengan duty cycle sesuai dengan data masukan kendali.
Masukan kendali yang dihasilkan oleh PML pada perancangan yang sudah dilakukan sebelumnya, memiliki nilai yang sangat besar atau diluar batas data PWM yang diperbolehkan, yaitu 0 – 255. Data 0 merepresentasikan duty cycle 0%, sedangkan 255 adalah 100%. Agar masukan kendali yang dihasilkan memiliki range 0-255, maka diperlukan penskala dan pengubah data masukan kendali menjadi data PWM.
Pada penelitian ini, harus dicari masukan kendali maksimal yang dihasilkan oleh PML untuk model sistem yang sudah dioptimisasi dengan algoritma genetika. Hal ini digunakan untuk memudahkan dalam melakukan penskalaan bagi masukan kendali. Skala yang dibuat agar masukan kendali berada pada batas-batas data yang diperbolehkan oleh PWM adalah seperti yang dapat dilihat pada persamaan (3.54) ....(3.54) ... ... ... ... ... ... ... ) max( 255 0 0 ) max( 255 ' 2 1 ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = u u u u u
Untuk menghindari jika masukan kendali memiliki nilai yang sangat besar lagi, maka pada perancangan pengendali ini dibuat batasan-batasan agar masukan kendali masih berada pada batas-batas nilai PWM yang diperbolehkan. Persamaan (3.55) di bawah ini memperlihatkan nilai keluaran akhir masukan kendali sebagai data PWM pada PIC-servo SC.
55) ...(3. ... ... ... ... limit] output , ) ( min[ ' deadband u abs PWM = +
Parameter deadband merupakan sebuah offset 8 bit (0 – 255) untuk mengkompensasi friksi statis atau daerah dead band pada amplifier. Sedangkan penskala keluaran PWM dibatasi dengan output limit (8 bit data) yang definisikan oleh pengguna. Sebagai contoh, jika menggunakan motor 12 V dan diberi catu daya 12 V maka output limit-nya adalah 255, sedangkan jika motor 12 V diberi catu daya 24 V maka output limit-nya adalah 255/2, atau 127.
Realisasi perangkat keras yang dibuat dalam mengimpelentasikan PML adalah seperti yang dapat dilihat pada Gambar III.13 berikut ini.
1
θ
2
θ
Gambar III.13 Diagram PML manipulator 2-DOF.
Dari Gambar III.13 di atas, susunan PML untuk robot manipulator adalah sebagai berikut:
1. joystik,
Joystik berfungsi sebagai pengatur arah atau posisi dari manipulator. Joystik merepresentasikan nilai acuan posisi dari PML. Pergerakan joystik ini sama dengan pergerakan manipulator, yaitu mengangguk dan menggeleng. Data keluaran remote adalah berupa data enkoder yang merepresentasikan posisi dari joystik. Data enkoder dihitung oleh
perangkat PIC-servo dan dikirim ke PC sebagai data acuan oleh perangkat kendali.
2. PIC-Servo SC,
PIC-servo SC berfungsi sebagai pemberi data PWM pada driver motor DC dan pembaca enkoder dari remote dan manipulator. PIC-Servo SC sendiri merupakan solusi satu chip untuk implementasi kendali servo motor DC dengan balikan incremental encoder. PIC-Servo SC merupakan sebuah mikrokontroler PIC18F2331 yang telah diprogram dengan berbagai fitur, diantaranya pengendali PID, kendali posisi dan kecepatan dan sebuah antarmuka serial yang dapat terhubung dengan RS232, RS485 dan RS422. Selain dari itu dilengkapi dengan enkoder yang dapat berantarmuka dengan enkoder dari motor DC. Gambar III.14 merupakan skematik modul PIC-Servo yang digunakan dalam mengendalikan motor DC.
Gambar III.14 Skematik modul PIC-Servo SC.
Dalam mengirim paket data dan perintah ke PIC-servo SC untuk menggerakan atau menjalankan motor, digunakan komunikasi serial.
Koneksi antar modul jika menggunakan lebih dari satu modul diperlihatkan pada Gambar III.15 di bawah ini.
Gambar III.15. Koneksi beberapa modul kendali.
Masing-masing modul memiliki alamat yang unik yang diberikan secara dinamik oleh host. Paket perintah dikirim ke sebuah modul pengendali yang alamatnya sudah diinisialisasi oleh sebuah host dalam hal ini komputer. Jika paket perintah sudah diterima oleh modul, maka data status akan dikirim balik ke host. Kecepatan pengiriman data bawaan yang digunakan adalah 19.200 bit persecon tetapi dapat diubah sampai 230.400 bit persecon. Protokol komunikasi yang digunakan adalah 8 bit paket data, 1 start bit, 1 stop bit dan tidak menggunakan paritas. Paket perintah yang digunakan memiliki struktur sebagai berikut:
byte header (selalu 0xAA), byte alamat modul (0 - 255), byte perintah,
byte data tambahan (0 - 15 bytes), byte ceksum (8-bit).
Sedangkat paket status memiliki struktur sebagai berikut: byte status,
byte data status tambahan, byte ceksum.
Berikut ini Tabel III.2 adalah kumpulan paket perintah yang dapat digunakan pada PIC-Servo SC.
Tabel III.2 Paket perintah PIC-Servo SC Paket perintah Kode Byte data Keterangan
Reset position 0x0 0, 1 atau 5 Set atau clear 32 bit counter posisi Set address 0x1 2 Set alamat individual dan grup
Define status 0x2 1 Mendefinsikan data mana seharusnya dikirim dalam setiap paket status
Read status 0x3 1 Menyebabkan data status khusus dikirm balik hanya satu kali
Load trayectory 0x4 1-14 Mengambil parameter motion trajectory untuk mode kecepatan dan profil trapezoidal
Start motion 0x5 0 Mengeksekusi trayektori yang sudah diambil sebelumnya.
Set gain 0x6 15 Set penguatan PID dan batasan operasi Stop motor 0x7 1 atau 5 Memberhentikan motor dengan empat
mode pilihan
I/O control 0x8 1 Set beberapa pilihan I/O
Set homing 0x9 1 Set kondisi untuk mengambil posisi home Set baudrate 0xA 1 Set baudrate (hanya untuk group
command)
Clear bits 0xB 0 Clear status bit yang masih tersimpan bits Save as home 0xC 0 Menyimpan posisi sekarang pada register
posisi home
Add path point 0xD 0-14 Menambahkan poin pada buffer path point untuk mode path control
NoOp 0xE 0 Menyebabkan data status yang telah
didefinisiakn akan dikembalikan
Hard reset 0xF 0 atau 1 Reset pengednali kepada status power-up dengan pilihan menyimpan data pada EEPROM
PIC_servo SC memiliki beberapa lapisan kendali yang dapat digunakan sesuai dengan kebutuhan. Lapisan-lapisan tersebut dapat dilihat pada Gambar III.16 berikut ini.
Gambar III.16 Lapisan kendali PIC-servo SC.
Modus PWM
Lapisan kendali PIC-Servo SC paling bawah adalah modus PWM. Pada modus PWM, PIC-Servo SC menerima data PWM dari luar dan memberikan sinyal PWM langsung ke amplifier. Modus PWM aktif atau bekerja pada saat catu daya mulai bekerja, dan modus profile dan servo tidak aktif, modus PWM juga bekerja ketika modus posisi berhenti aktibat kehilangan daya, galat posisi keluar batas yang ditetapkan, dan pada saat perintan stop motor bekerja.
Modus Servo Posisi
Lapisan berikutnya adalah modus servo posisi. Pada modus ini, PID bekerja menghitung nilai PWM untuk menggerakkan motor pada posisi yang diinginkan.
Modus Kecepatan
Pada modus kecepatan, selain putaran motor dapat bekerja pada kecepatan konstan juga putaran motor dapat berubah dari satu nilai kecepatan ke nilai kecepatan lain secara halus dengan nilai percepatan tertentu.
Modus Posisi Trapezoidal
Pada modus ini, posisi tujuan, maksimum kecepatan dan percepatan dapat ditentukan oleh perancang. Ketika motor mulai bekerja, motor akan dipercepat sampai kecepatan maksimum kemudian tetap pada kecepatan konstan sampai posisi tujuan mendekat dan melakukan perlambatan sampai posisi tujuan tercapai.
Modus Path Control
Modus path control atau modus Coordinated Motion Control (CMC) merupakan modus khusus. Karena pada modus ini, host dapat dengan mudah mengkoordinasi pergerakan motor dari beberapa PIC-servo SC.
Modus Masukan Arah dan Step
Pada modus ini, motor bekerja pada modus stepper yaitu bergerak atau berputar berdasarkan urutan pulsa.
3. PC,
Komputer berfungsi sebagai host yang mengkoordinasi keseluruhan modul PIC-servo SC. Selain sebagai host, komputer berfungsi untuk mengimplementasikan pengendali modus luncur. Data posisi dari joystik dibaca oleh komputer dan dijadikan posisi acuan oleh PML untuk menghasilkan masukan kendali yang merepresentasikan nilai PWM. Sinyal PWM ini yang akan menggerakan manipulator untuk bergerak ke posisi acuan tersebut.
4. manipulator 2-DOF.
Manipulator 2-DOF merupakan plant yang akan dikendalikan pergerakannya menggunakan joystik.