6
BAB II
LANDASAN TEORI
2.1 Pengukuran Ketinggian Zat Cair
Metode pengukuran ketinggian zat cair yang paling sederhana dan yang
paling tua digunakan di industri adalah teknologi kaca penglihatan (sight glass). Dimana ketinggian dari suatu zat cair di dalam suatu bejana dapat langsung diukur dengan cara melihat kaca yang sudah diberikan ukuran ketinggian sebelumnya. Sebagaimana hal ini dapat dilihat pada Gambar 2.1.
Karena metode ini pembacaannya dilakukan secara konvensional, maka untuk memudahkan proses pembacaan, kaca penglihatan yang digunakan untuk mengukur ketinggian air harus terbuat dari bahan transparan.
h
Sight glass
Disamping nilai positif yang diberikan dengan adanya teknologi kaca penglihatan untuk pengukuran ketinggian zat cair. Ternyata pada kenyataannya teknologi kaca penglihatan ini sering menimbulkan beberapa masalah, yang diantaranya adalah:
1. Sering mengalami kebocoran instalasi. Hal ini dikarenakan bahan yang digunakan untuk kaca penglihatan tersebut merupakan bahan transparan yang rentan terhadap kebocoran.
2. Bahan transparan seperti kaca dan mika sering menimbulkan proses pemburaman, sehingga sering terjadi kesalahan dalam proses pengukuran. Karena masalah yang sering ditimbulkan tersebut, membuat teknologi kaca penglihatan ini sudah mulai ditinggalkan dan digantikan dengan teknologi yang lebih modern.
2.1.1 Metode Pengukuran Ketinggian Zat Cair
Berikut ini merupakan beberapa metode pengukuran ketinggian zat cair yang telah ditemukan dan digunakan sebagai pengganti dari teknologi kaca penglihatan, antara lain:
1. Metode Saklar Pelampung
Metode saklar pelampung merupakan salah satu teknologi pengukuran ketinggian zat cair yang sederhana. Dimana pada teknologi ini, dibutuhkan saklar
(switch) dan pelampung (float) untuk melakukan proses pengukurannya.
Prinsip kerja metode ini adalah dengan memanfaatkan gerakan mekanik pelampung yang diakibatkan karena adanya perubahan ketinggian permukaan zat cair untuk mengubah kondisi saklar. Sebagaimana yang terlihat pada Gambar 2.2.
h
Switch
Float
Gambar 2.2. Metode pengukuran ketinggian air dengan saklar pelampung.
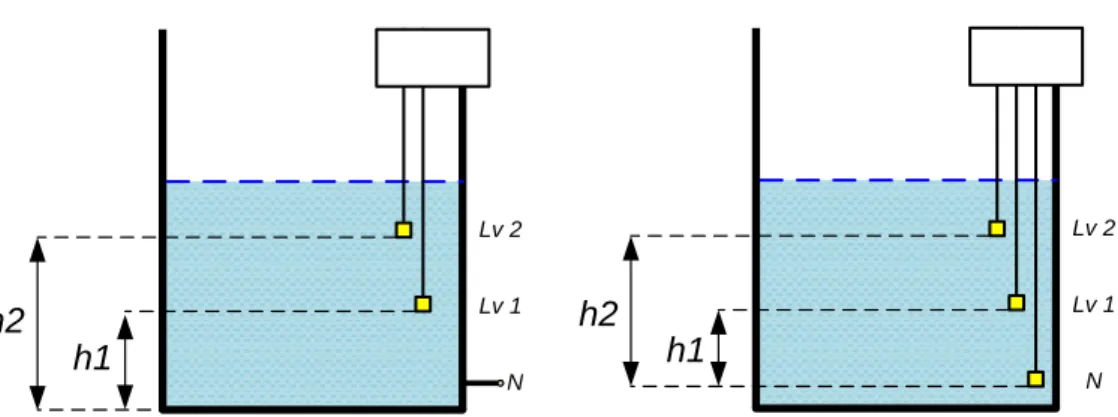
2. Metode Konduktifitas
Pengukuran ketinggian dengan metode konduktifitas hanya dapat digunakan pada zat cair yang bersifat konduktif, contohnya seperti air. Untuk mengukur ketinggian zat cair dengan metode ini membutuhkan beberapa elektroda yang digunakan sebagai indikator ketinggian.
Prinsip kerjanya adalah memanfaatkan sifat konduktifitas dari zat cair yang diukur. Dimana zat cair tersebut harus dapat menghantarkan arus listrik sehingga akan terjadi suatu kontak antara elektroda satu dengan elektroda yang lainnya.
Pada kasus bejana yang terbuat dari bahan konduktif seperti metal atau logam, bejana tersebut dapat digunakan sebagai penghantar N (neutral) atau GND
(grounding). Sedangkan, pada kasus bejana yang terbuat dari bahan isolator
seperti plastik atau kaca dibutuhkan elektroda tambahan untuk menghantarkan arus listrik ke N atau GND. Sebagaimana hal ini dapat dilihat pada Gambar 2.3.
h1
N Lv 1 Lv 2
h2
Tank made from non-conducting meterial
h1
N Lv 1 Lv 2
h2
Tank made from conducting meterial
Gambar 2.3. Metode pengukuran ketinggian air dengan konduktifitas.
3. Metode Kapasitansi
Pada dasarnya metode pengukuran ketinggian zat cair dengan metode kapasitansi menggunakan prinsip kerja yang sama seperti prinsip kerja dari kapasitor. Dimana proses pengukuran ketinggian dapat dilakukan karena menggunakan perbandingan antara kapasitansi bagian kapasitor yang terendam dengan bagian yang tidak.
Pada kasus zat cair yang bersifat konduktif seperti air, elektroda kapasitor harus dilapisi dengan bahan isolator agar tidak terjadi kontak langsung antara kedua elektroda. Sebagaimana hal ini dapat dilihat pada Gambar 2.4.
h
Conductingliquid
Insulated electrode
4. Metode Ultrasonik
Pengukuran ketinggian zat cair dengan metode ultrasonik merupakan salah satu metode pengukuran ketinggian yang modern. Kelemahan dari metode ini adalah rentan terhadap kondisi lingkungan. Dimana hasil pengukurannya sangat dipengaruhi oleh berat jenis gas (gas density) dan suhu (temperature) di lingkungan sekitarnya.
Prinsip kerja dari metode ultrasonik ini yaitu dengan cara mengukur waktu interval gelombang yang merambat dari transmitter sampai ke receiver. Hal ini dapat dilihat pada Gambar 2.5., dimana gelombang yang dikirim oleh transmitter akan dipantulkan oleh permukaan air dan diterima oleh receiver.
h
T R
T : Transmitter R : Receiver
Gambar 2.5. Metode pengukuran ketinggian air dengan ultrasonik.
2.1.2 Alasan Memakai Metode Kapasitif
Karena metode kapasitansi memiliki beberapa keunggulan daripada metode pengukuran ketinggian zat cair lainnya. Oleh karena itu, metode kapasitansi menjadi salah satu metode pengukuran ketinggian zat cair yang banyak digunakan baik untuk memenuhi kebutuhan di industri maupun kebutuhan
di rumah tangga. Berikut ini merupakan beberapa keunggulan dari metode kapasitansi tersebut, antara lain:
1. Harganya relatif lebih murah untuk harga dari suatu sistem pengukuran ketinggian zat cair.
2. Tidak ada gerakan mekanik dalam proses pengukurannya.
3. Mudah dalam melakukan proses instalasi dan perawatan (maintenance). 4. Dapat digunakan pada semua zat cair, baik zat cair yang mudah terbakar
(flammable), zat cair konduktif, maupun yang tidak.
5. Hasil pengukurannya sangat fleksibel dan memiliki range yang besar. 6. Dapat dioperasikan pada range suhu dari -400C sampai +2000C, dan
kondisi lingkungan yang bertekanan tinggi (high pressure).
2.2 Arduino 2.2.1 Pengenalan
Arduino adalah suatu platform dari physical computing bersifat open
source yang belandaskan pada suatu papan input/output (I/O) sederhana. Arduino
dapat digunakan untuk pengembangan beberapa objek yang bersifat interaktif atau dapat juga dikoneksikan ke perangkat lunak (software) seperti Flash, VVVV, atau
Max/MSP pada suatu komputer.
Arduino berbeda dengan platform lainnya yang ada dipasaran, karena Arduino memiliki beberapa fitur sebagai berikut :
1. Arduino merupakan suatu multiplatform environment yang dapat dioperasikan melalui Windows, Macintosh, dan Linux.
2. Pengoperasian Arduino berlandaskan pada bahasa pemrograman IDE
(Integrated Development Environment) sehingga memudahkan dalam
melakukan pengoperasian.
3. Diprogram melalui kabel USB, bukan melalui serial port.
4. Arduino merupakan open source baik hardware maupun software, sehingga dapat memungkinkan untuk mengunduh (download) diagram rangkaiannya, membeli semua komponen, dan membuatnya sendiri tanpa membayar.
5. Harga Arduino sangat terjangkau untuk suatu platform.
6. Terdapat banyak komunitas untuk pemakainya, sehingga memungkinkan untuk dapat saling membantu dalam melakukan pengoperasian.
7. Arduino telah dikembangkan untuk dapat digunakan di lingkungan pendidikan, sehingga bagi para pemula dapat belajar secara cepat dalam pengoperasiannya.
2.2.2 Platform Arduino
Arduino terdiri dari 2 bagian utama yaitu papan Arduino yang merupakan bagian hardware dimana sebagai tempat untuk membuat suatu percobaan dan Arduino IDE yang merupakan bagian software yang berfungsi untuk melakukan proses pembuatan program dengan komputer.
1. Hardware Arduino
Papan Arduino adalah suatu papan mikrokontroler yang berukuran kecil atau dapat diartikan juga dengan suatu rangkaian berukuran kecil yang didalamnya terdapat komputer berbentuk suatu chip yang kecil (mikrokontroler).
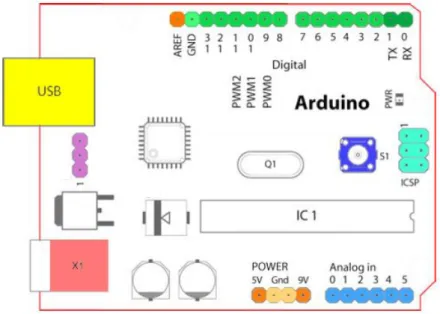
Pada Gambar 2.6. dapat dilihat sebuah papan Arduino dengan beberapa bagian komponen didalamnya. Berikut ini merupakan penjelasan dari beberapa komponen tersebut:
a. 14 pin IO Digital (pin 0 – 13)
Sejumlah pin digital dengan nomor 0 – 13 yang dapat dijadikan input atau output yang diatur dengan cara membuat program IDE.
b. 6 pin Input Analog (pin 0 – 5)
Sejumlah pin analog bernomor 0 – 5 yang dapat digunakan untuk membaca nilai input yang memiliki nilai analog dan mengubahnya ke dalam angka antara 0 dan 1023.
c. 6 pin Output Analog (pin 3, 5, 6, 9, 10 dan 11)
Sejumlah pin yang sebenarnya merupakan pin digital tetapi sejumlah pin tersebut dapat diprogram kembali menjadi pin output analog dengan cara membuat programnya pada IDE.
d. Power Supply
Papan Arduino dapat mengambil daya dari USB port pada komputer dengan menggunakan USB charger atau dapat pula mengambil daya dengan menggunakan suatu AC adapter dengan tegangan 9 volt.
Jika tidak terdapat power supply yang melalui AC adapter, maka papan Arduino akan mengambil daya dari USB port. Tetapi apabila diberikan daya melalui AC adapter secara bersamaan dengan USB port maka papan Arduino akan mengambil daya melalui AC adapter secara otomatis.
Gambar 2.6. Papan Arduino.
2. Software Arduino (IDE)
IDE atau Integrated Development Environment adalah suatu program khusus untuk suatu komputer agar dapat membuat suatu rancangan atau sketsa program untuk papan Arduino.
Suatu peristiwa yang hebat akan terjadi ketika tombol untuk melakukan proses upload sketsa ke papan Arduino ditekan. Kode sketsa yang telah dibuat kemudian akan diterjemahkan ke dalam bahasa C yang secara umum sangat susah digunakan bagi para pemula. Setelah itu, kode sketsa tersebut diberikan ke penyusun avr-gcc (avr-gcc compiler).
Avr-gcc compiler merupakan suatu bagian penting untuk software bersifat open source. Dengan adanya avr-gcc compiler, maka akan membuat bahasa
pemrogaman dapat dimengerti oleh mikrokontroler. Proses terakhir ini sangat penting, karena dengan adanya proses ini maka akan membuat proses pemrogaman mikrokontroler menjadi sangat mudah.
Berikut ini merupakan gambaran siklus yang terjadi dalam melakukan pemrogaman Arduino:
Koneksikan papan Arduino dengan komputer melalui USB port.
Tuliskan sketsa rancangan suatu program yang akan dimasukkan ke dalam papan Arduino.
Upload sketsa program ke dalam papan Arduino melalui kabel USB dan kemudian tunggu beberapa saat untuk melakukan restart pada papan Arduino.
Papan Arduino akan mengeksekusi rancangan sketsa program yang telah dibuat dan di-upload ke papan Arduino.
2.3 Melakukan Penginstalan Arduino Ke Komputer
Untuk melakukan pemrogaman pada papan Arduino, disarankan untuk men-download IDE Arduino terlebih dahulu yang dapat diperoleh dari situs: www.arduino.cc/en/Main/Software. Dan kemudian pilih versi yang tepat untuk sistem operasi komputer yang digunakan.
Setelah melakukan download, lakukanlah proses uncompress dengan cara melakukan double-click pada file tersebut. Proses ini secara otomatis akan membuat suatu folder yang bernama arduino-[version], contohnya seperti
arduino-0012.
Setelah melakukan penginstalan IDE Arduino pada komputer, tahap selanjutnya adalah harus melakukan penginstalan untuk driver. Fungsi utama penginstalan driver ini adalah agar komputer dapat melakukan komunikasi dengan papan Arduino melalui USB port.
2.3.1 Melakukan Penginstalan Driver Untuk Machintosh
Cari folder Drivers yang berada di dalam folder arduino-0012 dan kemudian buka file yang bernama FTDIUSBSerialDriver_x_x_x.dmg (untuk
x_x_x akan dituliskan dengan nomor versi driver, untuk contohnnya adalah FTDIUSBSerialDriver_v2_2_9_Intel.dmg) dan setelah itu, buka file dengan
format .dmg tersebut.
Tahap selanjutnya adalah melakukan penginstalan software dari file
FTDIUSBSerialDriver dengan cara melakukan double-click pada file tersebut.
Kemudian ikuti petunjuk penginstalan software dan masukkan password
administrative user jika ditanya. Setelah itu, restart mesin komputer untuk
memastikan bahwa driver sudah terinstal pada komputer.
2.3.2 Melakukan Penginstalan Driver Untuk Windows
Koneksikan papan Arduino dengan komputer dan ketika Found New
Hardware Wizard pada layar muncul, Windows secara otomatis akan mencoba
menemukan terlebih dahulu driver tersebut pada halaman Windows Update.
Windows XP akan meminta untuk memeriksa Windows Update, dan jika
tidak ingin menggunakan Windows Update pilih menu “No,not at this time” dan tekan tombol Next. Dan pada layar selanjutnya, pilih menu “Install from a list or
specific location” dan tekan tombol Next.
Periksa layar berjudul “Include this location in the search” dan tekan tombol Browse. Kemudian pilih folder dimana Arduino sudah terinstal dan pilih
folder Drivers\FTDIUSB Drivers untuk menetukan lokasinya dan tekan tombol OK dan Next pada layar tesebut.
Windows Vista akan berusaha menemukan driver tersebut pada Windows Update, dan jika terjadi kegagalan dalam melakukan pencarian driver, maka
lakukan pencarian secara manual pada folder Drivers\FTDIUSB Drivers.
Proses pencarian driver secara manual memiliki dua prosedur yang harus dilewati, yang pertama komputer harus menginstal driver low-level terlebih dahulu dan yang kedua adalah menginstal bagian kode yang membuat papan Arduino terlihat seperti suatu serial port untuk komputer.
Apabila driver telah terinstal, maka Arduino IDE dapat diaktifkan dan papan Arduino dapat digunakan pada komputer. Untuk tahap selanjutnya adalah harus selalu mengingat serial port komputer yang telah ditandai untuk papan Arduino.
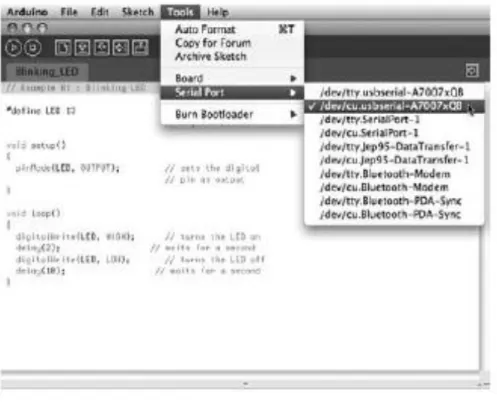
2.3.3 Identifikasi Port Pada Machintosh
Untuk melakukan identifikasi port pada Machintosh dapat melakukannya dengan cara berikut ini. Dari menu Tools pada layar Arduino IDE, pilih menu
“Serial Port” kemudian pilih menu port yang namanya diawali dengan /dev/cu.usbserial-. Nama tersebut adalah nama yang telah digunakan komputer
dan memiliki fungsi untuk menghubungkan ke papan Arduino. Gambar 2.7. menggambarkan daftar terminal komputer pada Machintosh.
Gambar 2.7. Daftar terminal komputer pada Machintosh.
2.3.4 Identifikasi Port Pada Windows
Pada Windows, proses untuk melakukan identifikasi port sedikit lebih rumit dibandingkan dengan Machintosh. Pertama, buka layar Device Manager dengan cara memilih menu Start, lakukan right-clicking pada Computer (Vista) atau My Computer (XP), dan pilih Properties.
Pada Windows XP, pilih Hardware dan kemudian pilih Device Manager. Sedangkan untuk Windows Vista, pilih Device Manager yang telah ada didalam daftar pada sebelah kiri layar.
Cari Arduino device yang berada dibawah daftar “Port (COM & LPT)”. Arduino akan muncul sebagai suatu USB serial port dan akan memiliki suatu nama seperti COM3, hal ini dapat dilihat pada Gambar 2.8.
Gambar 2.8. Device Manager pada Windows menampilkan semua terminal serial.
2.4 Troubleshooting Arduino
Dalam membuat suatu eksperimen atau percobaan dengan Arduino, memungkinkan sekali terjadinya kegagalan dalam melakukan pengoperasiannya. Sedangkan kita dituntut harus dapat memperbaiki kegagalan yang terjadi agar Arduino dapat beroperasi dengan benar.
Troubleshooting dan debugging merupakan seni yang sudah ada dari dulu.
Dan agar didapatkan suatu hasil yang diinginkan oleh kita, maka kita harus memenuhi peraturan yang dimiliknya terlebih dahulu.
Semakin sering kita menggunakan komponen elektronik dan Arduino dalam membuat suatu percobaan, maka kita akan semakin banyak belajar dan semakin banyak mendapatkan pengalaman. Oleh karena itu, jangan putus asa
dengan permasalahan yang akan muncul dalam melakukan suatu percobaan karena semuanya akan menjadi lebih mudah apabila sudah dihadapi.
Seperti semua percobaan Arduino yang telah dibuat, jika terdapat kesalahan baik yang berasal dari hardware maupun software maka disana kemungkinan akan ada lebih dari satu hal yang perlu dicari penyebab dari kesalahan tersebut.
Ketika mencari suatu bug atau akar dari suatu masalah yang muncul seharusnya kita mengoperasikan Arduino meliputi tiga langkah berikut:
Pemahaman (understanding)
Mencoba untuk memahami sebanyak mungkin bagaimana cara kerja dari setiap bagian komponen yang digunakan dan bagaimana bagian dari komponen tersebut telah memberikan pengaruh terhadap percobaan yang dibuat.
Penyederhanaan dan pembagian (simplification and segmentation)
Orang Romawi kuno mengatakan devide et impera: divide and rule, atau dalam bahasa Indonesia berarti pembagi dan peraturan. Oleh karena itu, untuk membuat percobaan Arduino cobalah lakukan perincian (break down) terhadap percobaan ke dalam setiap komponennya dengan pemahaman yang kita miliki dan memperhitungkan dimana tanggung jawab dari setiap komponen tersebut.
Pemisahan dan kepastian (exclusion and certainty)
Ketika melakukan investigasi, melakukan pengujian secara terpisah pada setiap komponen sangat dibutuhkan untuk memastikan bahwa setiap komponen bekerja dengan benar. Dengan melakukan tahap ini akan membangun rasa keyakinan pada diri kita sendiri terhadap bagian percobaan mana yang bekerja dengan benar maupun yang tidak.
Debugging adalah istilah yang telah digunakan software komputer untuk
menggambarkan suatu proses tidak bekerja dengan benar. Konon dikatakan bahwa istilah tersebut dipakai untuk pertama kalinya oleh Garce Hopper pada sekitar tahun 1940-an. Dimana pada waktu itu, komputer yang sebagian besarnya merupakan peralatan elektromekanis, ada yang berhenti beroperasi karena ada serangga yang terjebak di dalam sistem mekaniknya.
Tetapi pada saat ini, bug bukan berbentuk fisik lagi, melainkan suatu
virtual yang tidak dapat dilihat. Oleh karena itu, terkadang dibutuhkannya suatu
proses indentifikasi yang panjang dan membosankan dalam menemukan bug.
2.4.1 Melakukan Pengujian Pada Papan Arduino
Kita ambil contoh kasus yang sederhana yaitu mengalami kegagalan pada saat melakukan percobaan “mengedipkan LED”. Mari cari tahu apa yang harus dilakukan.
Sebelum menyalahkan percobaan yang dibuat, kita harus memastikan beberapa komponen sudah berada di dalam urutan yang benar. Sama halnya dengan seorang pilot suatu maskapai penerbangan yang menggunakan beberapa daftar pemeriksaan sebelum melakukan penerbangan, untuk memastikan bahwa pesawat dalam kondisi yang baik.
Koneksikan papan Arduino ke USB port yang ada pada komputer dengan menggunakan kabel USB.
Pastikan komputer dalam kondisis menyala (mungkin kedengarannya konyol tapi hal ini pernah terjadi). Jika lampu PWR yang berwarna hijau pada papan Arduino menyala, berarti menandakan papan Arduino telah disuplai daya oleh
komputer. Jika LED terlihat sangat redup, berarti ada suatu kesalahan dengan daya yang disuplai: coba ganti kabel USB dan lakukan pemeriksaan antara USB port pada komputer dan konektor USB pada papan Arduino. Jika masih mengalami kegagalan, ganti USB port yang lainnya pada komputer tersebut atau gunakan komputer yang lain.
Jika Arduino yang digunakan merupakan produk baru, lampu LED yang berwarna kuning akan mulai berkedip dengan pola menyala sedikit gugup. Pengujian ini merupakan pengujian yang dilakukan di pabrik untuk menguji papan Arduino.
Jika menggunakan power supply eksternal dan menggunakan jenis Arduino yang lama seperti Extreme, NG, atau Diecimila, pastikan bahwa power supply tersambung dengan benar dan jumper yang ditandai dengan SV1 menghubungkan dua pin yang terdekat dengan konektor power supply eksternal.
2.4.2 Melakukan Pengujian Rangkaian Pada Papan Percobaan (Breadboard)
Sekarang koneksikan papan Arduino dengan papan percobaan breadboard dengan memasang jumper dari 5 V. Kemudian untuk ground atau GND dikoneksikan ke rel positif dan negative yang berada pada papan percobaan
breadboard. Jika LED PWR yang berwarna hijau tidak menyala, segera lepaskan
semua kabel. Hal tersebut menandakan bahwa terdapat kesalahan besar dan terjadi hubung singkat (short circuit) pada rangkaian. Pada saat terjadinya hubung singkat, papan Arduino menarik terlalu banyak arus dan daya akan terputus untuk melindungi komputer.
Jika terjadi short circuit, maka kita harus memulainya kembali dari proses penyederhanaan dan pembagian (simplification and segmentation). Setelah itu, yang harus dilakukan adalah memeriksa setiap sensor yang digunakan pada percobaan tersebut dan untuk memudahkan sebaiknya setiap pemeriksaan menggunakan satu sensor saja.
2.4.3 Masalah Isolasi
Peraturan penting yang lainnya untuk mengatasai masalah adalah usahakan cari suatu cara yang handal agar permasalahan yang lainnya tidak muncul. Jika terjadi masalah yang bersifat tidak menentu pada rangkaian, coba temukan apa yang menyebabkan permasalahan tersebut muncul dan pastikan tidak ada kegagalan isolasi pada rangkaian.
2.4.4 Masalah Dengan IDE
Pada beberapa kasus terutama pada Windows, mungkin memiliki masalah yang berhubungan dengan penggunaan IDE Arduino.
Jika terdapat kesalahan saat membuka Arduino, gunakan metode alternatif dengan cara membuka file run.bat.
Biasanya pemakai Windows juga sering mendapatkan masalah jika sistem operasi memberikan nomor COM10 atau yang benomor lebih untuk papan Arduino. Untuk mengatasi masalah ini, kita dapat menentukan nomor yang lebih rendah untuk Arduino dengan cara sebagai berikut:
1. Buka layar Device Manager pada Windows dengan membuka menu Start. Lakukan klik kanan (right-click) pada layar komputer untuk Vista atau My
Computer dan pilih menu Properties untuk XP. Kemudian pilih menu Device Manager.
2. Cari serial device di dalam daftar “Ports (COM & LPT)”. Dan pilih serial
device bernomor COM9 atau bernomor lebih rendah yang tidak digunakan
dengan cara pilih menu Properties (right-click). Kemudian pada tab Port
Setting, pilih menu Advanced dan lakukan pengaturan nomor pada
COM10 atau yang bernomor lebih besar.
3. Lakukan hal yang sama pada serial terminal USB yang digunakan untuk mengoperasikan Arduino.
Jika beberapa saran tersebut masih tidak dapat membantu, atau jika mengalami permasalahan yang belum dijelaskan pada laporan ini, untuk
troubleshooting Arduino yang lebih lengkap dapat dilihat dari halaman situs:
www.arduino.cc/en/Guide/Troubleshooting.
2.4.5 Bagaimana Mendapatkan Bantuan Secara Online
Jika masih mengalami kebuntuan, ingatlah bahwa Arduino merupakan
open source dan memiliki komunitas yang besar di seluruh dunia. Oleh karena itu,
manfaatkan keunggulan tersebut dan jangan mudah putus asa terhadap permasalahan yang dihadapi.
Untuk memudahkan pencarian dapat memulainya dari situs utama yaitu www.arduino.cc dan lihat FAQ (www.arduino.cc/en/Main/FAQ). Kemudian pindah ke layar playground (www.arduino.cc/playground). Disana dapat ditemukan beberapa dokumentasi dan contoh percobaan Arduino yang telah dikirim oleh orang dari seluruh dunia.
Apabila masih mengalami kebuntuan karena tidak menemukan jawaban dari permasalahan yang sedang dihadapi, maka lakukan pencarian forum (www.arduino.cc/cgi-bin/yabb2/YaBB.pl). Jika masih tidak membantu, kirim pertanyaan mengenai masalah yang sedang anda hadapi.
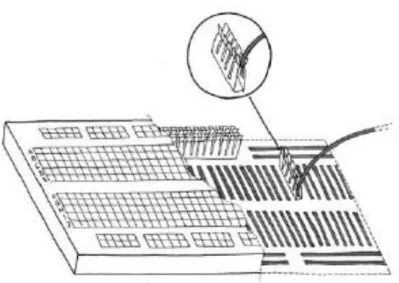
2.5 Papan Percobaan Beardboard
Proses untuk mendapatkan rangkaian yang bekerja dengan baik dan handal membutuhkan perhitungan dan perancangan yang tepat. Untuk dapat memenuhi persyaratan itu maka sebelum melakukan proses penyolderan perlu dilakukan percobaan dan pengujian terhadap rangkaian yang dibuat.
Salah satu solusi untuk memecahkan masalah tersebut adalah dengan menggunakan papan percobaan beardboard. Papan percobaan beardboard memiliki sejumlah lubang yang dapat digunakan untuk menyambung rangkaian. Pada setiap lubang tersebut terdapat pegas yang berfungsi untuk memegang kaki komponen sehingga rangkaian yang terpasang tidak mudah lepas. Untuk lebih jelasnya dapat dilihat pada Gambar 2.9.
2.6 Kapasitor
Salah satu komponen yang penting di dalam elektronika selain resistor adalah kapasitor. Kapasitor memiliki beberapa sifat antara lain: dapat menyimpan muatan listrik, dapat menahan arus DC (Direct Current), dan dapat dilewati oleh arus AC (Alternating Current).
Kapasitor pada umumnya terdiri dari dua plat konduktor atau lebih yang dipasang sejajar dan dipisahkan oleh suatu bahan isolator atau bahan dielektrika. Bahan dielektrika yang dipasang pada kapasitor tersebut memiliki beberapa fungsi antara lain:
1. Untuk memisahkan kedua plat konduktor secara mekanis. Sehingga, walaupun jaraknya sangat dekat tetapi tidak akan berhubungan satu plat dengan yang lainnya.
2. Untuk memperbesar kemampuan kedua plat dalam menerima tegangan. 3. Untuk memperbesar nilai kapasitansi.
Karena besarnya nilai kapasitansi , maka dengan menurunnya
tegangan antara kedua plat akan mengakibatkan bertambahnya nilai kapasitansi. Jadi, nilai kapasitansi dari suatu kapasitor adalah berbanding langsung dengan nilai permitivitas dari bahan dielektrika yang digunakan untuk memisahkan antara kedua plat tersebut.
Beberapa faktor lain yang mempengaruhi besarnya nilai kapasitansi suatu kapasitor adalah jarak antara kedua plat dan luas penampang plat. Dimana semakin besar luas penampang plat suatu kapasitor, berarti semakin besar kemampuan kapasitor tersebut untuk menyimpan muatan listrik dan semakin
besar pula nilai kapasitansinya. Tetapi sebaliknya bila jarak antara kedua plat semakin jauh maka nilai kapasitansinya akan semakin kecil.
Rumus untuk menentukan nilai kapasitansi suatu kapasitor dapat dituliskan sebagai berikut:
Dimana:
Kapasitansi (F).
Permitivitas ruang hampa (8,854 x 10-12
F/m).
Permitivitas relatif dari bahan dielektrika. Luas penampang plat (m2
).
Jarak antara kedua plat (m).
2.6.1 Kapasitor Dalam Hubungan Seri
Rangkaian kapasitor dalam hubungan seri dapat dilihat pada Gambar 2.10. Tujuan dari rangkaian kapasitor dihubung seri adalah untuk meningkatkan kemampuan menahan tegangan listrik.
Kapasitor pengganti dari setiap jumlah kapasitor yang dihubungkan seri adalah sama dengan suatu kapasitor yang bertambah tebal bahan dielektriknya. Sehingga nilai kapasitansi totalnya selalu lebih kecil dari setiap kapasitor itu sendiri.
Dengan induksi elektrostatis jumlah total muatan yang diberikan suatu
sistem adalah sama dengan muatan pada setiap kapasitor .
Jadi, dapat didefinisikan sebagai muatan Q yang dipindahkan melalui setiap titik suatu rangkaian di dalam proses pengisian kapasitor.
Rumus , berlaku untuk seluruh sistem dan untuk setiap
kapasitor. Di dalam rangkaian hubungan seri, jumlah perbedaan potensial setiap kapasitor adalah sama dengan pemberian tegangan pada sistem.
Jadi, dapat dituliskan dengan persamaan berikut:
Karena nilai , maka diperoleh persamaan berikut:
Maka, dapat disimpulkan bahwa nilai kapasitor pengganti dari setiap kapasitor yang dihubungkan seri dapat diperoleh dengan cara yang sama dengan cara untuk memperoleh nilai tahanan total dari beberapa tahanan yang dihubungkan parallel.
2.6.2 Kapasitor Dalam Hubungan Parallel
Bila beberapa jumlah kapasitor dihubungkan secara parallel dan kemudian diberikan suatu tegangan E, maka jumlah muatan seluruhnya adalah sama dengan jumlah muatan dari setiap kapasitor. Salah satu dari sifat rangkaian kapasitor hubungan parallel adalah tegangan pada setiap kapasitor sama dengan tegangan
sumber yang diberikan .
Karena nilai , maka akan diperoleh persamaan berikut:
Maka, dapat disimpulkan bahwa nilai kapasitor pengganti dari beberapa kapasitor yang dihubungkan parallel dapat diperoleh dengan cara yang sama dengan cara untuk memperoleh nilai tahanan total dari beberapa tahanan yang dihubungkan seri.
2.7 Proses Charging Kapasitors
Suatu rangkaian yang digunakan untuk melakukan proses pengisian
(charging) kapasitor membutuhkan suatu tegangan yang konstan dan nilai
resistansi yang dipasang seri terhadap suatu kapasitor. Resistansi yang dipasang seri berfungsi untuk mengatur waktu pengisian kapasitor. Sebagaimana seperti rangkaian yang ditunjukkan pada Gambar 2.12. Dimana fungsi waktu saat terjadinya proses pengisian kapasitor akan didapatkan.
E
R C
VR VC
Gambar 2.12. Rangkaian pengisian kapasitor.
Dari rangkaian pada Gambar 2.12. kita dapat memulai analisis dengan menerapkan hukum tegangan Kirchoff: dimana tegangan input (E) harus sama dengan penjumlahan tegangan yang jatuh pada resistor (VR) dan tegangan pada
kapasitor (VC).
Untuk mengisi kapasitor, tegangan E harus lebih besar daripada VC(0).
Dengan asumsi bahwa E merupakan tegangan yang konstan, dengan mengetahui bahwa tegangan yang jatuh pada resistor sama dengan i(t) x R dan persamaan
tegangan pada kapasitor, maka kita dapat memodifikasi persamaan tersebut menjadi:
Suatu bentuk untuk arus harus sudah didapatkan sebelum tegangan pada kapasitor dapat dihitung. Untuk situasi ini, transformasi Laplace dapat diterapkan. Kemudian, kita dapat mengalikan dengan C.
Dan kita dapat menerapkan transformasi Laplace dari persamaan yang tersisa tersebut.
Selanjutnya, kita dapat mengalikan s pada kedua sisinya dan mendapatkan persamaan sebagai berikut:
Karena bentuk persamaan ini tidak mudah untuk dapat mengubahnya ke dalam bentuk inverse, maka kita gunakan suatu faktor R pada sisi sebelah kanan. Sehingga didapatkan persamaan berikut:
Sekarang persamaan yang diperoleh dapat disederhanakan dengan mengubahnya ke bentuk inverse. Untuk menyederhanakannya kita dapat mengeluarkan faktor RC seperti contoh berikut:
Dan bentuk I(s) yang didapat sekarang menjadi:
Yang mana persamaan tersebut dapat diubah ke dalam bentuk inverse menjadi persamaan berikut ini:
Sedangkan, untuk mendapatkan tegangan kapasitor pada waktu tertentu
Persamaan tersebut merupakan bentuk terakhir untuk tegangan kapasitor. Nilai tegangan mengikuti kurva logaritma yang mempunyai nilai kemiringan berdasarkan nilai resistansi (R) dan nilai kapasitansi (C). Nilai Tegangan kapasitor
VC(t) akan mendekati nilai tegangan sumber (E) pada akhir proses pengisian.
Sedangkan, apabila tegangan kapasitor sama dengan nol maka
persamaan tersebut dapat disederhanakan menjadi:
Oleh karena itu, dapat dikatakan bahwa tingkat pengisian kapasitor tergantung pada nilai R dan C. Yang mana tingkat pengisian kapasitor tersebut biasanya disebut dengan konstanta waktu dan dilambangkan dengan huruf Yunani tau ( .
Dimana:
Konstanta waktu (second).
Tahanan seri terhadap kapasitor (Ω). Kapasitansi (farad).
2.8 Antarmuka Modul LCD
Modul LCD atau liquid crystal display memiliki beberapa pin dimana setiap pin-nya memiliki fungsi tersendiri. Untuk lebih jelasnya, fungsi dari setiap pin pada modul LCD tersebut dapat dilihat pada Tabel 2.1.
34
Tabel 2.1. Fungsi dari setiap pin pada modul LCD. Pin Signal Level Direction Description
1 VSS GND Ground
2 VDD + 5v Supply voltage for logic
3 V0 Variable
Supply voltage for driving LCD V0 = + 1v typical at VDD = + 5v
which give a VLCD = (VDD – V0) = + 4v
4 RS H/L I
Register selection in put H: Data register (for read or write) L: Instruction code (for write)
5 RW H/L I
H: Read (MPU module) L: Write (MPU module)
6 E H, H L I
Read/write enable signal
H: Read data is enable by a high level
H L: Write data is latched on the falling edge
7 D0 H/L I/O Data bit 0
8 D1 H/L I/O Data bit 1
9 D2 H/L I/O Data bit 2
10 D3 H/L I/O Data bit 3
11 D4 H/L I/O Data bit 4
12 D5 H/L I/O Data bit 5
13 D6 H/L I/O Data bit 6
14 D7 H/L I/O Data bit 7
15 A Supply voltage for LED “A” (anode) or “+” of LED backlight