Hal: 225-231
Peningkatan Kualitas Citra Dengan Gaussian Filter
Terhadap Citra Hasil Deteksi Robert
Sinar Sinurat1*, Edward R. Siagian1
1Fakultas Ilmu Komputer dan Teknologi Informasi, Program Studi Teknik Informatika, Universitas Budi Darma, Medan, Indonesia
Email: 1*[email protected], 2[email protected]
Abstrak
Penggunaan citra sangat vital penggunaannya dalam teknologi informasi, terbukti dalam interaksi sehari-hari oleh banyak orang dengan interaksi mobile Android yaitu facebook, whatsapp, instagram, telegram dan lain sebagainya. Penggunaan citra untuk mewakili sebuah makna yang akan disampaikan. Citra memungkinkan akan mengalami penurunan mutu karena sering digunakan atau karena modifikasi para pengguna, misalnya mengandung cacat atau derau (noise), warnanya terlalu kontras, kurang tajam, kabur (blurring), dan sebagainya. Dalam kondisi demikian perlu perbaikan citra (image enhancement) yang bertujuan mendapatkan tampilan yang lebih baik. Banyak teknik atau metode yang digunakan dalam perbaikan citra (image enhancement). Antara lain menggunakan metode gaussian fillter dan contrast stretching. Citra yang digunakan oleh banyak pengguna kemungkinan tidak 100% mengalami gangguan (noise), mungkin sebagian kecil diseluruh area gambar, maka untuk itu perlu dilakukan analisa untuk mengenali citra dibagian mana yang akan diberikan peningkatan kualitas. Metode Gaussian Filter baik untuk menghilangkan noise yang bersifat sebaran normal, yang banyak dijumpai pada citra hasil digitasi kamera yang dipengaruhi fenomena alamiah akibat sifat pantulan cahaya dan kepekaan sensor cahaya pada kamera itu sendiri. Pada metode ini juga melibatkan peregangan kontras (contrast stretching) yaitu teknik untuk memperbaki kontras citra terutama citra yang memiliki kontras rendah. Proses peregangan kontras termasuk proses perbaikan kualitas citra yang bersifat point processing, yang hanya tergantung dari nilai intensitas gray level satu piksel, dan tidak tergantung piksel lain disekitarnya. Deteksi tepi dengan Metode Robert akan dilakukan sebelum proses perbaikan dengan Gaussian Filter. Deteksi tepi dimaksud adalah untuk melokalisasi noise yang ditemukan dalam citra.
Kata Kunci : Citra, Noise, Gaussian, Filter, Contrast, Stretching, Tepi, Detection, Robert
1. PENDAHULUAN
Penggunaan citra (image) pada era teknologi informasi ini merupakan salah satu komponen multimedia dengan suatu peranan penting sebagai bentuk informasi visual. Citra memiliki banyak fungsi untuk yang mungkin tidak tersedia dalam data teks. Meskipun citra menjadi informasi vital penggunaannya terutama dalam mobile android, akan tetapi mengalami penurunan kualitas (degradasi) seperti mengandung cacat atau derau (noise), warnanya terlalu kontras, kurang tajam, kabur (blurring), perubahan warna tidak sebanding antara latar dan citranya, pengaruh perbedaan teknologi yang digunakan oleh pengguna dan lain sebagainya sehingga proses representasinya tidak maksimal memberikan informasi yang diinginkan. Perubahan ini dapat dinyatakan sebagai derau (noise) yang menyebabkan citra terlalu kontras, kabur, kurang tajam dan lain sebagainya. Dalam mengatasi hal tersebut perlu perbaikan mutu citra yang akan diselesaikan dengan Metode Gaussian Filter. Perbaikan citra (image enhancement) bertujuan mendapatkan citra yang lebih baik.
Dalam beberapa ringkasan penelitian, dikutip beberapa artikel yang mewakili dan memaknai maksud perbaikan citra dan deteksi tepi JIPI (Jurnal Ilmiah Penelitian dan Pembelajaran Informatika) Volume 03, Nomor 02, Desember 2018 : 116-121 “IMPLEMENTASI PENGURANGAN NOISE PADA CITRA TULANG MENGGUNAKAN METODE MEDIAN FILTER DAN GAUSSIAN FILTER”. Citra diuji diberikan gaussian noise pada citra x-ray, kemudian dianalisa performanya secara kuantitatif. Dalam penelitian ini akan dilakukan proses pengukuran dalam mengurangi noise pada citra yang dilakukan dengan metode Peak Signal-to-Noise Ratio
(PSNR) yang dilakukan saat proses filtering.
Jurnal Teknologi Informasi dan Ilmu Komputer (JTIIK) Vol. 6, No. 6, Desember 2019, hlm 591-600. Akreditasi KEMENRISTEKDIKTI, No. 30/E/KPT/2018 DOI: 10.25126/jtiik.20196870 p-ISSN: 2355-7699 e-ISSN: 2528-6579 “PENINGKATAN KUALITAS CITRA CT-SCAN DENGAN PENGGABUNGAN METODE FILTER GAUSSIAN DAN FILTER MEDIAN”. Sumijan1, Pradani Ayu Widya Purnama2, Syafri Arlis3 1,2,3 Universitas Putra Indonesia”YPTK” Padang. Proses Peningkatan kualitas citra dapat dilakukan dengan menerapkan salah satu metode pemfilteran.
MEDIA INFORMATIKA BUDIDARMA, Vol 2, No 1, Januari 2018 ISSN 2614-5278 (media cetak) ISSN 2548-8368 (media online) Hal 35-44. “Penerapan Metode Robert Pada Deteksi Tepi Citra Split Underwater”; Ofnika Febrina Br Barus. Metode ini bekerja dengan mendeteksi tepi bagian vertikal dan mendeteksi tepi bagian horizontal terhadap citra berwarna yang sudah diubah menjadi citra grayscale, kemudian hasil deteksi tepi dari kedua bagian tersebut dijumlahkan sebagai hasil akhir. Hasil yang diperoleh dari deteksi tepi yang dilakukan dengan menggunakan metode Robert berupa titik-titik hingga membentuk seperti garis-garis dari tepi-tepi setiap objek yang terdapat dalam sebuah citra. Dari garis-garis tersebut akan diperoleh bentuk- bentuk yang sesungguhnya dari setiap objek yang terdapat pada sebuah citra.
2. METODOLOGI PENELITIAN A. Metodologi Penelitian
Langkah-langkah formulasi pengumpulan data dalam penelitian adalah :
Hal: 225-231 1. Mengumpulkan data input citra dengan berbagai tipe dan
resolusinya diatur maksimal 200x200 piksel dan setting size matriks citra 5x5
2. Mengubah citra warna menjadi grayscale : Untuk mengubah citra berwarna yang mempunyai nilai matrik masing-masing r, g dan b menjadi citra grayscale dengan nilai s, maka konversi dapat dilakukan dengan mengambil rata-rata dari nilai r, g dan b. [11]
3. Mengumpul sejumlah pustakan yang berhubungan dengan citra yang pengolahannya dengan Gaussian Filter dan sejenisnya serta deteksi tepi dengan metode Robert 4. Melakukan analisis dan menerapkan kedua metode
secara bertahap dimulai dari mengenal noise yang ada pada citra, mensegmentasi noise terdapat pada citra, deteksi tepi citra yang bernoise dengan Metode Robert, menerapkan Gaussian Filter untuk meningkatkan kualitas citra dimaksud
5. Membangun basis data serta kamus data untuk dihubungkan dengan aplikasi
6. Mempersiapkan dan menyusun laporan secara bertahap 7. Mengimplementasikan rancangan aplikasi
8. Melakukan pengujian data dan menarik kesimpulan 9. Membuat laporan akhir
B. Tahapan Pengolahan
a. Filtering : Tahapan ini untuk mencegah munculnya deteksi tepi yang tidak sesuai dengan harapan (ekspektasi) yang disebabkan oleh adanya noise dalam citra dengan Gaussian Filter. [11]
b. Grayscale : Mengubah pixel citra RGB menjadi grayscale. Tingkatan grayscale ada 2 macam yaitu : 1) dari 0-127 untuk grayscale rendah dan 2) dari 128-255 untuk grayscale tinggi. Citra grayscale berfungsi untuk penyederhanaan model citra, dimana citra warna terdapat 3 layer yaitu : 1) R-layer, 2) G-layer, 3) B-layer. Ketiga poin ini menjadi acuan dalam pengolahan selanjutnya. Apabila proses perhitungan menggunakan RGB layer maka ketiganya dilakukan cara yang sama, inilah yang menjadi dasar karena perhitungan sama maka pengolahan citra dalam kasus ini diubah ke grayscale. Dalam grayscale tidak lagi memperhitungan warna tetap hanya derajat keabuan. Secara umum mengubah RGB menjadi grayscale adalah jumlah nilai R, G, B dibagi 3 [11]
c. Mencari Arah, Jarak Gradien, Partisi : intensitas tingkat keabuan akan berubah secara drastis sehingga lokasi akan diperoleh dengan menentukan gradien suatu citra. Gradien pada tiap pixel dari citra yang telah dihaluskan ditentukan dengan operator Robert. Tahap paling awal adalah memperkirakan gradien sesuai jumlah operator arah dengan mengaplikasikan kernel. Citra dipartisi menjadi beberapa blok dimana masing-masing blok mempunyai ukuran sebesar matrik kernel, tujuan dilakukan partisi citra menjadi beberapa blok adalah untuk melakukan segmentasi beberapa blok dimana tiap ukuran blok dapat disesuaikan. [11]
d. Operasi Blok Citra : Operasi setiap pixel dalam blok untuk semua blok yang ada, sehingga setiap blok
melakukan operasi yang sama. Operasi yang dimaksud adalah mencari titik-titik tetangga dari koordinat pixel (x,y). [11]
e. Penentuan Target : Setelah titik-titik tetangga dari semua koordinat dalam blok didapatkan, langkah berikutnya adalah mencari perbedaan nilai gray level untuk setiap, dimana d adalah arah, r dan l adalah tetangga suatu koordinat dan mn adalah lokasi suatu blok. Terdapat empat nilai selisih gray level sesuai dengan d atau arah yang digunakan.[11]
f. Operasi Robert : Tepi (edge) adalah perubahan nilai intensitas derajat keabuan yang cepat atau tiba tiba dalam jarak yang dekat, pada suatu citra dapat menghasilkan tepi tepi dari obyek tersebut untuk menandai bagian yang detail pada citra tujuanya memperbaiki dari citra yang kabur atau eror. Efek adanya dari proses akuisisi citra pada titik (x,y) dikatakan sebagai tepi (edge) apabila dari suatu citra terdapat perbedaan yang tinggi sama dengan tetangganya. Proses deteksi tepi (edge detection) ini sendiri operator atau sebuah metode dikelompokan berdasarkan yang digunakan dalam proses pendeteksian suatu citra tepi untuk memperoleh hasil persamaan piksel dari citra. [12][8]
g. Proses Gaussian Filtering : Bilateral Filtering adalah Bilateral Filter merupakan salah satu metode restorasi citra khususnya penapis derau pada citra digital. Pada metode ini, nilai piksel citra hasil diperoleh dari rata - rata pembobotan piksel – piksel tetangga melalui proses konvolusi [6][7][3] disebabkan dari noise. Untuk mengurangi noise digunakan metode bilateral filtering
dan Gaussian filtering sehingga menghasilkan bilateral filtering image dan Gaussian Filtering Image
C. Noise Filtering
Citra adalah suatu representasi, kemiripan, atau imitasi dari suatu objek. Citra sebagai keluaran suatu sistem perekaman data dapat bersifat optik berupa foto, bersifat analog berupa sinyal-sinyal video seperti gambar pada monitor televisi, atau bersifat digital yang dapat langsung disimpan pada suatu media penyimpan [1][2].
Noise merupakan sesuatu ketidaksesuaian pemetaan akibat penyimpanan data citra mempengaruhi kualitas citra. Noise dapat berupa gangguan fisik (optik) pada alat penangkap citra, misalnya debu yang menempel pada lensa foto ataupun karena pengolahan yang tidak sesuai. [3][4]
Ada tiga jenis noise yaitu gaussian noise, speckle noise, dan salt and pepper noise. Noise Gaussian : model noise yang mengikuti distribusi normal standar dengan rata-rata nol dan standard deviasi 1. Jadi sebaiknya citra tersebut dibersihkan dari noise terlebih dahulu, dan kemudian diproses untuk diekstrak fitur-fitur pentingnya. Salah satu teknik untuk mereduksi noise adalah order-statistics filters, yang merupakan filter spasial dimana hasil responsnya didasarkan pada pengurutan nilai piksel yang dilingkupi oleh filter [5].
Menurut Usman Salah satu filter linier adalah filter rata-rata (Filter Mean) dari intensitas pada beberapa pixel lokal dimana setiap pixel akan digantikan nilainya dengan
Hal: 225-231 rata-rata dari nilai intensitas pixel tersebut dengan
pixel-pixel tetangganya, dan jumlah pixel-pixel tetangga yang dilibatkan tergantung pada filter yang dirancang. ). Rumus menghitung mean adalah : [6] dimana : = Nilai rata-rata (Mean), N=Jumlah data, xi=nilai ke-i, i=nilai awal
Mean filtering yang digunakan untuk efek smoothing ini merupakan jenis spatial filtering, yang dalam prosesnya mengikutsertakan piksel-piksel disekitarnya. Piksel yang akan diproses dimasukkan dalam sebuah matrik yang berdimensi NxN. Ukuran N ini tergantung pada kebutuhan, tetapi nilai N haruslah ganjil sehingga piksel yang diproses dapat diletakkan tepat ditengah matrik. [6]
Modus adalah nilai variabel yang memiliki frekuensi tertinggi (Usman, 2005). Modus dapat ditemukan pada data yang telah diurutkan maupun yang belum terurut. Untuk menentukan modus filter ini, pertama sekali menentukan piksel utama yang akan diproses dari piksel-piksel disekitarnya. Pada modus filtering digunakan matrik berdimensi NxN. Dari matrik tersebut, kemudian data yang ada diurutkan dan dimasukkan dalam sebuah matrik berukuran 1x(NxN). Hal ini berguna untuk mempermudah menemukan modusnya untuk pencarian nilai yang terbanyak frekuensinya dari kumpulan data yang telah urut tersebut. [6] Menurut Usman, Gaussian Filtering baik untuk menghilangkan noise yang bersifat sebaran normal, yang mungkin banyak ditemukan pada sebaran citra hasil proses digitasi menggunakan kamera, karena pengaruh fenomena alamiah akibat sifat pantulan cahaya dan kepekaan sensor cahaya pada kamera itu sendiri.
Gaussian Blur adalah Filter blur menempatkan warna transisi yang signifikan pada suatu citra, kemudian membuat warna-warna pertengahan untuk menciptakan efek lembut pada sisi-sisi citra. Gaussian blur adalah salah satu filter blur yang menggunakan efek autofocus untuk mengurangi detail dan menciptakan efek berkabut. Gaussian adalah istilah matematika yang diambil dari nama seorang matematikawan Jerman, Karl Friedrich Gauss. [5].
D. Konvolusi
Konvolusi (convolution) adalah sebuah proses dimana citra dimanipulasi dengan menggunakan eksternal mask / subwindows untuk menghasilkan citra yang baru Sedangkan Filtering tanpa menggunakan ekternal mask tetapi hanya menggunakan pixel tetangga untuk mendapatkan pixel yang baru. [2]
E. Metode Robert
Metode Robert adalah nama lain dari teknik differensial yang dikembangkan yaitu differensial pada arah horizontal dan differensial pada arah vertikal, dengan ditambahkan proses konversi biner setelah dilakukan differensial. Kernel filter yang digunakan dalam metode Robert ini yaitu : [8] [9]
1 1
H dan 1 1 H 3. ANALISA A. Analisa MasalahCitra biner ditentukan dari proses batas ambang (threshold) selanjutnya diproses untuk mengambil dan memotong bagian warna putih atau nilai pixel = 1. Proses ini dilakukan dalam langkah-langkah sebagai berikut :
1) Memisahkan bagian non citra.
2) Menentukan ruang segmentasi. Bilangan ruang citra dihitung dengan persamaan berikut : E=C–H di mana : E=Bilangan Euler ; C=Bilangan komponen terhubung ; H=Bilangan Hole/ Ruang dalam daerah citra. Dengan menggunakan persamaan tersebut di atas bahwa H=1-E untuk menentukan daerah citra.
3) Mencari nilai statistik antara daerah ruang pada citra setelah ruang yang merepresentasikan potongan telah ditentukan. Persamaan 5.2 berikut digunakan untuk menemukan pusat massa dalam menentukan posisi
bagian citra sebagai berikut :
Mean(x)=(1/pic_area)*Σ(row_element*pic_element) Mean(y)=(1/pic_area)*Σ(col_element*pic_element)
4) Proses sebelumnya menunjukkan bahwa suatu citra memiliki paling tidak satu ruang setelah analisis atau memiliki ketinggian lebar rasio dari aproksimasi 1. Sudut pusat massa citra ditentukan dengan menggunakan pusat massa posisi objek citra, berikut persamaannya : θ = 0.5 tan (b/(a − c))
di mana : a=ΣΣ(x’)*2*pic_element ; b=2
ΣΣ(x’)*ΣΣ(y’)*pic_element; c=ΣΣ(y’)*2*pic_element ; x’=x-Mean(x) ; y’=y−Mean(y)
5) Setiap langkah dikonduksi pada semua daerah dengan nilai warna =1 dalam citra biner. Jika ketinggian = rasio lebar antara 0,6 hingga 1,2 ditentukan maka area segmentasi diasumsikan menjadi sebuah citra dan koordinatnya disimpan sebagai vektor baris.
6) Nilai koordinat digunakan terhadap form persegi sekitar wajah (bounding box) dalam citra
7) Bounding box dalam citra asli digunakan sebagai pembatas pada proses cropping.
Kegitaan perbaikan kualitas citra meningkatkan kualitas citra yang dianggap kurang akibat adanya gangguan (noise) pada citra menjadi lebih mirip dengan citra aslinya, Adanya derau tidak dapat dihindari yang mungkin disebabkan oleh faktor pengolahan citra yang tidak sesuai atau disebabkan faktor alamiah.
Citra RGB dengan kualitas rendah seperti objek citra yang tidak kelihatan karena rendahnya pencahayaan serta warna pada warna yang kabur, kemudian untuk memperbaiki tingkat kekaburan kualitas gambar RGB tersebut diterapkan teknik perbaikan tingkat kekaburan gambar.
Tujuan pembuatan sistem ini adalaah untuk memperbaiki citra bernoise. Pada awalnya pengguna memasukan input data berupa citra. Citra masukkan adalah citra grayscale, karena sistem hanya dibatasi untuk memproses citra grayscale. Kemudian pengguna diminta memasukan parameter menambah noise pada citra. Jika parameter telah dimasukkan, maka sistem siap melakukan proses penguranngan noise. Adapun tahapan yang dilakukan untuk mendeteksi tepi objek citra adalah :
Hal: 225-231 1) Menentukan citra yang akan dilakukan deteksi tepi
2) Merubah menjadi citra grayscale
3) Menghitung citra grayscale dengan Kernel Robert Vertikal
4) Menghitung citra grayscale dengan Kernel Robert horijontal
5) Menghitung nilai gradien citra yang merupakan nilai hasil akhir
B. Penerapan Operator Laplacian
Dimisalkan citra berukuran 5x5 pixel dan sebuah
mask laplace yang berukuran 3x3, maka operasi konvolusi
pada citra dengan mask direpresentasi ke dalam Gambar 1 sebagai berikut : 54 46 30 32 52 46 57 80 75 39 -1 -1 -1 f(xy) 50 98 141 131 88 ; g(x,y) -1 8 -1 201 235 245 236 248 -1 -1 -1 253 255 255 255 254
Gambar 1. Citra Asal dikonversi ke Matriks Bernilai
Decimal
Maka konvolusi citra f(x,y) dengan mask g(x,y) adalah f(x,y) * g(x,y)
54 46 30 32 52 * * * * *
46 57 80 75 39 -1 -1 -1 * -89 * * *
50 98 141 131 88 * -1 8 -1 = * * * * *
201 235 245 236 248 -1 -1 -1 * * * * *
253 255 255 255 254 * * * * *
Proses perkalian konvolusi = -89; nilai ini dihitung dengan cara berikut :
(-1*54) + (-1*46) + (-1*30) + (-1*46) + (8*57) + (-1*80) + (-1*50) + (-1*98) + (-1*141) = -89 54 46 30 32 52 * * * * * 46 57 80 75 39 -1 -1 -1 * -89 30 * * 50 98 141 131 88 * -1 8 -1 = * * * * * 201 235 245 236 248 -1 -1 -1 * * * * * 253 255 255 255 254 * * * * *
Proses perkalian konvolusi = 30; nilai ini dihitung dengan cara berikut :
(-1*46) + (-1*30) + (-1*32) + (-1*57) + (8*80) + (-1*75) + (-1*98) + (-1*141) + (-1*131) = 30 54 46 30 32 52 * * * * * 46 57 80 75 39 -1 -1 -1 * -89 30 7 * 50 98 141 131 88 * -1 8 -1 = * * * * * 201 235 245 236 248 -1 -1 -1 * * * * * 253 255 255 255 254 * * * * *
Proses perkalian konvolusi = 7; nilai ini dihitung dengan cara berikut :
(-1*30)+(-1*32)+(-1*52)+(-1*80)+(8*75)+(-1*39)+(-1*141)+(-1*131)+(-1*88) = 7 54 46 30 32 52 * * * * * 46 57 80 75 39 -1 -1 -1 * -89 30 7 * 50 98 141 131 88 * -1 8 -1 = * 271 * * * 201 235 245 236 248 -1 -1 -1 * * * * * 253 255 255 255 254 * * * * *
Proses perkalian konvolusi = 271; nilai ini dihitung dengan cara berikut :
(-1*46) + (-1*57) + (-1*80) + (-1*50) + (8*98 ) + (-1*141) + (-1*201) + (-1*235) + (-1*245) = 271 54 46 30 32 52 * * * * * 46 57 80 75 39 -1 -1 -1 * -89 30 7 * 50 98 141 131 88 * -1 8 -1 = * 271 -29 * * 201 235 245 236 248 -1 -1 -1 * * * * * 253 255 255 255 254 * * * * *
Proses perkalian konvolusi = -29; nilai ini dihitung dengan cara berikut :
(-1*57)+(-1*80)+(-1*75)+(-1*98)+(8*141)+(-1*131)+(-1*231)+(-1*245)+(-1*236) = -29 54 46 30 32 52 * * * * * 46 57 80 75 39 -1 -1 -1 * -89 30 7 * 50 98 141 131 88 * -1 8 -1 = * 271 -29 -104 * 201 235 245 236 248 -1 -1 -1 * * * * * 253 255 255 255 254 * * * * *
Proses perkalian konvolusi = -104; nilai ini dihitung dengan cara berikut :
(-1*80) + (-1*75) + (-1*39) + (-1*141) + (8*131) + (-1*88) + (-1*245) + (-1*236) + (-1*248) = -104 54 46 30 32 52 * * * * * 46 57 80 75 39 -1 -1 -1 * -89 30 7 * 50 98 141 131 88 * -1 8 -1 = * 271 -29 -104 * 201 235 245 236 248 -1 -1 -1 * 382 * * * 253 255 255 255 254 * * * * *
Proses perkalian konvolusi = 382; nilai ini dihitung dengan cara berikut :
1*50) + 1*98) + 1*141) + 1*201) + (8*235) + (-1*245) + (-1*253) + (-1*255) + (-1*255) = 382 54 46 30 32 52 * * * * * 46 57 80 75 39 -1 -1 -1 * -89 30 7 * 50 98 141 131 88 * -1 8 -1 = * 271 -29 -104 * 201 235 245 236 248 -1 -1 -1 * 382 354 * * 253 255 255 255 254 * * * * *
Proses perkalian konvolusi = 354; nilai ini dihitung dengan cara berikut :
1*98) + 1*141) + 1*131) + 1*235) + (8*245) + (-1*236) + (-1*255) + (-1*255) + (-1*255) = 354 54 46 30 32 52 * * * * * 46 57 80 75 39 -1 -1 -1 * -89 30 7 * 50 98 141 131 88 * -1 8 -1 = * 271 -29 -104 * 201 235 245 236 248 -1 -1 -1 * 382 354 271 * 253 255 255 255 254 * * * * *
Proses perkalian konvolusi = 271; nilai ini dihitung dengan cara berikut :
1*141) + 1*131) + 1*88) + 1*225) + (8*236) + (-1*248) + (-1*255) + (-1*255) + (-1*255) = 271
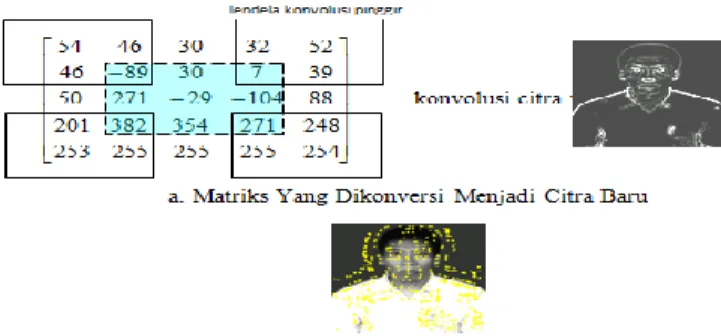
Sehingga hasil akhir perhitungan operasi Laplacian adalah sebagai berikut :
54 46 30 32 52 46 -89 30 7 39 50 271 -29 -104 88 201 382 354 271 248 253 255 255 255 254
Dari hasil akhir matriks konvolusi terlihat bahwa nilai matriks asal tetap dipertahankan, disebabkan pada saat pergeseran jendela konvolusi (kernel) ada kemungkinan jendela konvolusi menggantung sehingga nilai perhitungan tidak dapat dicari maka nilai paling pinggir tetap dipertahankan, diperlihatkan pada matrik dalam gambar 2. sebagai berikut :
Hal: 225-231
Gambar 2. Matriks Citra Asal Dikonvolusi Ke Mask
Dengan Laplacian
C. Penerapan Metode Robert
Metode Robert merupakan proses differensial pada arah horijontal dan arah vertikal dengan ditambahkan proses konversi biner setelah dilakukan differensial. Kernel filter yang digunakan adalah :H[1 1] dan
1 1 H Konversi deteksi
Filter dalam pengolahan citra digunakan untuk menemukan frekuensi tinggi yang dalam citra digital berarti penghalusan dalam hal ini penghalusan juga berarti pengurangan noise, karna noise dapat disebut memiliki intensitas tinggi atau frekuensi tinggi. Untuk mencari atau merancang sebuah filter gaussian terdapat konstanta yang harus ditentukan terlebih dahulu secara manual, yaitu menentukan nilai standart devasi dan ukuran filter yang di buat dalam hal ini efek gambar hasil filter gaussian dapat di atur dalam mengubah-ubah nilai standard deviasi. Filter gaussian tergolong sebagai filter lolos rendah yang didasarkan pada fungsi gaussian. Model dua dimensinya berupa :
e
y
x
y x G 2 2 2 ) , ( Dimana x dan y adalah posisi kordinat pada sumbu x dan y. Persamaan inilah yang dipakai sebagai dasar untuk menentukan nilai-nilai setiap elemen dalam filter gaussian yang akan dibuat. Misal akan dibuat kernel filter ukuran 5x5 dan mengisi elemen/ bobot g(x,y) pada matriks kernel gaussian, sedangkan : e(euler)= 2,718281828 (konstanta), σ(Standart Deviasi )=2, G=grayscale. Dimisalkan sebuah matriks citra yang digunakan adalah berukuran 5x5, seperti tabel di bawah ini :
Tabel 1. Data Matriks Filter Gaussian
G(x,y) 1 2 3 4 5 1 149 140 107 102 100 2 145 37 82 141 114 3 103 86 77 162 105 4 93 45 18 48 32 5 140 40 15 16 11
Kernel adalah matriks yang pada umumnya berukuran kecil dengan elemn-elemennya adalah berupa bilangan. Kernel digunakan pada proses konvolusi. Oleh karena itu kernel juga di sebut dengan konvolusion window
(jendela konvolusi). Ukuran kernel dapat berbeda-beda, seperti 2x2, 3x3, 5x5, dan sebagainya. Elemen-elemen yang juga di sebut bobot (weight) adalah bilangan yang membentuk pola-pola tertentu.kernel biasa juga disebut dengan tapis (filter), template,mask, serta slidding window. Ukuran kernel yang dipakai disini yaitu kernel ukuran 5x5 piksel. Citra f(x,y) adalah citra grayscale yang berukuran 5x5 piksel dan g(x,y) adalah kernel dengan matriks 5x5 sebagai berikut : 149 140 107 102 100 1 1 2 1 1 145 37 82 141 114 1 2 2 2 1 f(x,y) 103 86 77 162 105 f(x,y) 2 2 3 2 2 93 45 18 48 32 1 2 2 2 1 140 40 15 16 11 1 1 2 1 1
a. Nilai Konvolusi Citra Grayscale b. Nilai Kernel Tabel 2. Matriks Kernel
x/y -2 -1 0 1 2 -2 1 1 2 1 1 -1 1 2 2 2 1 0 2 2 3 2 2 1 1 2 2 2 1 -2 1 1 2 1 1
D. Pengurangan Noise Dengan Metode Gaussian Filter
Operasi ini dilakukan dengan cara konvolusi, konvolusi sering kali dilibatkan dalam operasi keterangan piksel. Konvolusi pada citra sering di sebut konvolusi 2 dimensi. Konvolusi 2 dimensi didefenisikan sebagai proses sebagai proses untuk memproleh suatu piksel berdasarkan nilai piksel itu sendiri dan tetangganya, dengan melibatkan suatu matriks yaitu kernel yang mempresentasikan pembobotan. Penjelasan rumus yang digunakan dlam konvolusi Gaussian filter pada persamaan di bawah ini :
M k N i y k x g l k f y x g y x f y x h 2 2 ) 1 , ( ), , ( ) , ( * ) , ( ) , (dimana : h(x,y) = gambar output, f(x,y) = adalah gambar output, g(x,y) = adalah Gaussian Filter
Langkah selanjutnya adalah melakukan operasi konvolusi dengan cara menempatkan suatu filter/kernel pada setiap piksel yang ditimpali, kemudian nilai rata diambil dari hasil-hasil tersebut. Pada proses konvolusi kernel di geser sepanjang baris dan kolom dalam citra sehingga diperoleh nilai baru pada citra keluaran. Letakkan filter g(x,y) mulai dari titik(x-2,y-2) dari titik citra yang akan di filtering. Kemudian hitung berdasarkan sel-sel pada titiktersebut dan titik tetangganya dengan bobot pada sel-sel matriks filter g(x,y) sesuai proses sel-selnya, maka nilai piksel hasil operasi konvolusi : G(x,y) = (1*149) + (1*140) + (2*107) + (1*102) + (1*100) + (1*145) + (2*37) + (2*82) + (1*141) + (1*114) + (2*103) + (2*86) + (3*77) + (1*162) + (2*105) + (1*93) + (2*45) + (2*18) + (2*48) + (1*32) + (1*140) + (2*15) + (1*16) + (1*11) = 149 + 140 + 214 + 102 + 100 + 145 + 74 + 164 + 141 + 114 + 206 + 172 + 231 + 162 + 210 + 93 + 90 + 36 + 96 + 32 + 40 + 40 + 30 + 16 + 11 = 2802 / 39 = 72
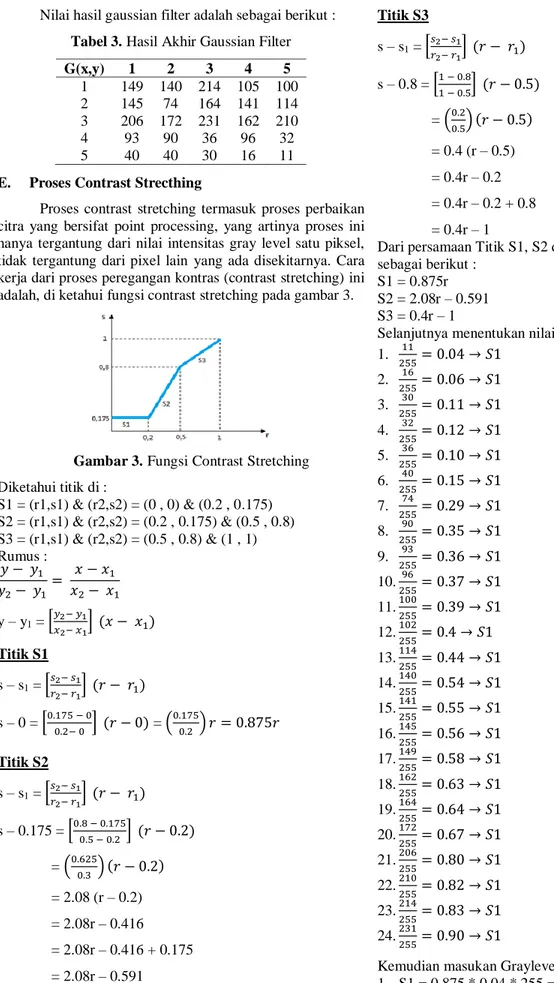
Hal: 225-231 Nilai hasil gaussian filter adalah sebagai berikut :
Tabel 3. Hasil Akhir Gaussian Filter
G(x,y) 1 2 3 4 5 1 149 140 214 105 100 2 145 74 164 141 114 3 206 172 231 162 210 4 93 90 36 96 32 5 40 40 30 16 11
E. Proses Contrast Strecthing
Proses contrast stretching termasuk proses perbaikan citra yang bersifat point processing, yang artinya proses ini hanya tergantung dari nilai intensitas gray level satu piksel, tidak tergantung dari pixel lain yang ada disekitarnya. Cara kerja dari proses peregangan kontras (contrast stretching) ini adalah, di ketahui fungsi contrast stretching pada gambar 3.
Gambar 3. Fungsi Contrast Stretching
Diketahui titik di : S1 = (r1,s1) & (r2,s2) = (0 , 0) & (0.2 , 0.175) S2 = (r1,s1) & (r2,s2) = (0.2 , 0.175) & (0.5 , 0.8) S3 = (r1,s1) & (r2,s2) = (0.5 , 0.8) & (1 , 1) Rumus : 𝑦 − 𝑦1 𝑦2− 𝑦1 = 𝑥 − 𝑥1 𝑥2− 𝑥1 y – y1 = [ 𝑦2− 𝑦1 𝑥2− 𝑥1] (𝑥 − 𝑥1) Titik S1 s – s1 = [𝑠2− 𝑠1 𝑟2− 𝑟1] (𝑟 − 𝑟1) s – 0 = [0.175 − 0 0.2− 0 ] (𝑟 − 0) = ( 0.175 0.2 ) 𝑟 = 0.875𝑟 Titik S2 s – s1 = [𝑠2− 𝑠1 𝑟2− 𝑟1] (𝑟 − 𝑟1) s – 0.175 = [0.8 − 0.175 0.5 − 0.2 ] (𝑟 − 0.2) = (0.625 0.3 ) (𝑟 − 0.2) = 2.08 (r – 0.2) = 2.08r – 0.416 = 2.08r – 0.416 + 0.175 = 2.08r – 0.591 Titik S3 s – s1 = [ 𝑠2− 𝑠1 𝑟2− 𝑟1] (𝑟 − 𝑟1) s – 0.8 = [1 − 0.8 1 − 0.5] (𝑟 − 0.5) = (0.2 0.5) (𝑟 − 0.5) = 0.4 (r – 0.5) = 0.4r – 0.2 = 0.4r – 0.2 + 0.8 = 0.4r – 1
Dari persamaan Titik S1, S2 dan S3 didapat persamaan sebagai berikut :
S1 = 0.875r S2 = 2.08r – 0.591 S3 = 0.4r – 1
Selanjutnya menentukan nilai gray level 1. 25511 = 0.04 → 𝑆1 2. 25516 = 0.06 → 𝑆1 3. 30 255= 0.11 → 𝑆1 4. 32 255= 0.12 → 𝑆1 5. 25536 = 0.10 → 𝑆1 6. 25540 = 0.15 → 𝑆1 7. 74 255= 0.29 → 𝑆1 8. 90 255= 0.35 → 𝑆1 9. 25593 = 0.36 → 𝑆1 10. 96 255= 0.37 → 𝑆1 11. 100 255= 0.39 → 𝑆1 12. 102 255= 0.4 → 𝑆1 13. 114 255= 0.44 → 𝑆1 14. 140 255= 0.54 → 𝑆1 15. 141 255= 0.55 → 𝑆1 16. 145255= 0.56 → 𝑆1 17. 149 255= 0.58 → 𝑆1 18. 162255= 0.63 → 𝑆1 19. 164255= 0.64 → 𝑆1 20. 172 255= 0.67 → 𝑆1 21. 206 255= 0.80 → 𝑆1 22. 210255= 0.82 → 𝑆1 23. 214255= 0.83 → 𝑆1 24. 231 255= 0.90 → 𝑆1
Kemudian masukan Graylevel pada persamaan : 1. S1 = 0.875 * 0.04 * 255 = 8.92 = 9
Hal: 225-231 3. S1 = 0.875 * 0.11 * 255 = 24.54 = 25 4. S1 = 0.875 * 0.12 * 255 = 26.77 = 27 5. S1 = 0.875 * 0.10 * 255 = 22.31 = 22 6. S1 = 0.875 * 0.15 * 255 = 33.46 = 33 7. S2 = 2.08 * 0.29 – 0.591 * 255 = -150.10 = -150 8. S2 = 2.08 * 0.35 – 0.591 * 255 = -149.97 = -150 9. S2 = 2.08 * 0.36 – 0.591 * 255 = -149.95 = -150 10. S2 = 2.08 * 0.37 – 0.591 * 255 = -149.93 = -150 11. S2 = 2.08 * 0.39 – 0.591 * 255 = -149.89 = -150 12. S2 = 2.08 * 0.4 – 0.591 * 255 = -149.87 = -150 13. S2 = 2.08 * 0.44 – 0.591 * 255 = -149.78 = -150 14. S3 = 0.4 * 0.54 – 1 * 255 = -254.78 = - 255 15. S3 = 0.4 * 0.55 – 1 * 255 = -254.78 = - 255 16. S3 = 0.4 * 0.56 – 1 * 255 = -254.77 = - 255 17. S3 = 0.4 * 0.58 – 1 * 255 = -254.74 = - 255 18. S3 = 0.4 * 0.63 – 1 * 255 = -254.74 = - 255 19. S3 = 0.4 * 0.64 – 1 * 255 = -254.74 = - 255 20. S3 = 0.4 * 0.67 – 1 * 255 = -254.73 = - 255 21. S3 = 0.4 * 0.80 – 1 * 255 = -254.68 = - 255 22. S3 = 0.4 * 0.82 – 1 * 255 = -254.67 = - 255 23. S3 = 0.4 * 0.83 – 1 * 255 = -254.66 = - 255 S3 = 0.4 * 0.90 – 1 * 255 = -254.64 = - 255 4. KESIMPULAN
Adapun yang menjadi kesimpulan dari penelitian ini adalah Proses peningkatan kualitas citra akan lebih baik jika input citra memiliki banyak tekstur. Peningkatan kualitas citra dengan deteksi tepi dengan robert terlihat bagus dimungkinkan karena perkalian kernel (Mask) vertikal dan horizontal. Penggunaan kombinasi contrast stretching untuk memperlihatkan citra lebih tajam.
REFERENCES
[1] P. Ayu, W. Purnama, and S. Arlis, “PENINGKATAN KUALITAS CITRA CT-SCAN DENGAN PENGGABUNGAN THE IMPROVEMENT QUALITY OF IMAGE CT-SCAN WITH COMBINING,” vol. 6, no. 6, pp. 591–600, 2019.
[2] H. Sunandar, “Perbaikan kualitas Citra Menggunakan Metode Gaussian Filter,” vol. 2, no. 1, pp. 19–22, 2017.
[3] A. H. Nasyuha, P. Studi, S. Informasi, T. D. Medan, and P. Citra, “IMPLEMENTASI PENGOLAHAN CITRA DENGAN MENGGUNAKAN TEKNIK KONVOLUSI UNTUK PELEMBUTAN CITRA ( IMAGE SMOOTHING ) DALAM,” pp. 150–162, 1978.
[4] G. Saselah, W. Weku, L. Latumakulita, J. Matematika, J. Matematika, and J. Matematika, “Perbaikan Citra Digital dengan Menggunakan Filtering Technique dan Similarity Measurement,” pp. 1–9.
[5] A. Wedianto, H. L. Sari, and Y. S. H, “ANALISA PERBANDINGAN METODE FILTER GAUSSIAN , MEAN DAN MEDIAN TERHADAP REDUKSI NOISE,” vol. 12, no. 1, pp. 21– 30, 2016.
[6] B. Yuwono, “IMAGE SMOOTHING MENGGUNAKAN MEAN FILTERING , MEDIAN FILTERING , MODUS FILTERING DAN GAUSSIAN FILTERING,” vol. 485323, no. 274.
[7] M. R. Khilmawan and A. A. Riadi, “Implementasi pengurangan noise pada citra tulang menggunakan metode median filter dan gaussian filter,” vol. 3, pp. 116–121, 2018.
[8] E. R. Kuswandi and N. Fadillah, “InfoTekJar : Jurnal Nasional InformatikadanTeknologiJaringan Perbandingan Metode Robert dan Metode Prewitt Untuk Deteksi Tepi pada Citra Tanda Tangan,” vol. 2, pp. 4–7, 2019.
[9] P. Ofnika, “Penerapan metode robert pada deteksi tepi citra split
underwater,” vol. 2, no. 1, pp. 35–44, 2018.
[10] P. Teguh, K. Putra, N. Kadek, and A. Wirdiani, “Pengolahan Citra Digital Deteksi Tepi Untuk,” vol. 2, no. 2, pp. 253–261, 2014. [11] A. Essra, “ANALISIS DETEKSI TEPI CANNY PADA CITRA
DENGAN GAUSSIAN FILTERING DAN BILATERAL,” vol. 2, no. 1, pp. 34–39.