1 HALAMAN JUDUL
TUGAS AKHIR – TE 145561
M Imam Syafi’i Nur S NRP 2213030009 Rahmatul Fitriani NRP 2213030030
Dosen Pembimbing Suwito, ST,. MT
PROGRAM STUDI D3 TEKNIK ELEKTRO Fakultas Teknologi Industri
Institut Teknologi Sepuluh Nopember Surabaya 2016
PEMBUATAN SISTEM
WEARABLE PEDOMETER DENGAN
DISPLAY PADA SISTEM ANDROID
3 HALAMAN JUDUL
FINAL PROJECT – TE 145561
M Imam Syafi’i Nur S NRP 2213030009 Rahmatul Fitriani NRP 2213030030
Advisor
Suwito, ST,. MT
ELECTRICAL ENGINEERING D3 STUDY PROGRAM Faculty of Industrial Technology
Institut Teknologi Sepuluh Nopember Surabaya 2016
MAKING A WEARABLE PEDOMETER SYSTEM WITH ANDROID
DISPLAY SISTEM
v
PERNYATAAN KEASLIAN
PERNYATAAN KEASLIAN
TUGAS AKHIR
Dengan ini kami menyatakan bahwa isi sebagian maupun
keseluruhan Tugas Akhir saya dengan judul “Pembuatan Sistem
Wearable Pedometer dengan Display pada Sistem Android” adalah benar-benar hasil karya intelektual mandiri, diselesaikan tanpa menggunakan bahan-bahan yang tidak diijinkan dan bukan merupakan karya pihak lain yang kami akui sebagai karya sendiri.
Semua referensi yang dikutip maupun dirujuk telah ditulis secara lengkap pada daftar pustaka.
Apabila ternyata pernyataan ini tidak benar, kami bersedia menerima sanksi sesuai peraturan yang berlaku.
Surabaya, 01 Juni 2016
Mahasiswa I Mahasiswa II
M Imam Syafi’i Nur S Rahmatul Fitriani
vi
vii
HALAMAN PENGESAHAN
PEMBUATAN SISTEM
WEARABLE
PEDOMETER DENGAN
DISPLAY
PADA SISTEM
ANDROID
TUGAS AKHIR
Diajukan Guna Memenuhi Sebagian Persyaratan Untuk Memperoleh Gelar Ahli Madya
Pada
Program Studi D3 Teknik Elektro Jurusan Teknik Elektro Institut Teknologi Sepuluh Nopember
Menyetujui: Dosen Pembimbing
Suwito, ST,. MT
NIP. 19810105 200501 1 004
viii
ix
PEMBUATAN SISTEM WEARABLE PEDOMETER DENGAN
DISPLAY PADA SISTEM ANDROID
Nama Mahasiswa 1 : M Imam Syafi’i Nur S
Nama Mahasiswa 2 : Rahmatul Fitriani
Pembimbing : Suwito, ST,. MT.
ABSTRAK
Osteoporosis terjadi karena kekurangan penyerapan kalsium 50% setiap harinya, salah satu solusi pencegahannya dengan cara berjalan kaki sesuai dengan standart kesehatan tiap hari sehingga dapat meningkatkan penyerapan kalsium. Untuk mengetahui jumlah langkah kaki seseorang setiap harinya dapat menggunakan alat penghitung langkah kaki atau pedometer. Beberapa pedometer terkadang salah dalam mencatat pergerakan seseorang misalnya ketika seseorang membungkuk, mengikat tali sepatu atau goncangan lain.
Oleh karena itu dalam Tugas Akhir ini kami telah membuat suatu alat yang berfungsi untuk mendeteksi dan menghitung langkah kaki seseorang dengan metode penghitungan gerak kaki dan perpindahan tubuh seseorang. Alat ini menggunakan sensor FSR (Force Sensitive Resistance) untuk mendeteksi pergerakan dari telapak kaki dan
Accelerometer untuk mendeteksi pergerakan dan perpindahan seseorang ketika berjalan. Output dari kedua sensor tersebut berupa data analog, sehingga dibutuhkan ADC (Analog to Digital Converter) untuk mengkonversikan data yang didapat tersebut ke dalam data digital
dengan menggunakan Mikrokontroller ATMega328. Ketika sensor FSR dan Accelerometer membaca pergerakan atau memberikan nilai ADC tertentu, maka Mikrokontroller ATMega328 akan mengkonversi dan akan dihitung hingga nilai maksimal. Hasil counter tersebut kemudian dikirimkan ke Smartphone melalui Bluetooth HC-05.
Pada aplikasi Android tersebut dapat menampilkan jumlah langkah kaki seseorang. Hasil pengujian dari alat ini didapatkan bahwa nilai error dari sistem wearable pedometer ini sebesar 2,75%. Ketika sistem wearable pedometer diuji pada 5 pengguna dengan ukuran kaki yang berbeda-beda maka error yang didapatkan adalah 11,15%.
Kata kunci : Sensor FSR, Accelerometer, Bluetooth HC-05,
x
xi
MAKING A WEARABLE PEDOMETER SYSTEM WITH
ANDROID DISPLAY SISTEM
Name : M Imam Syafi’i Nur S with the health standard every day so that it can increase the absorption of calcium. To determine the number of footsteps every day someone can use a foot step counter or pedometer. Some pedometers sometimes incorrectly in recording the movement of a person, for example when someone bent over, tying shoelaces or other shocks.
Therefore, in this final project we have to make a device that serves to detect and quantify a person's footsteps from the methods used footwork and movement of one's body. This tool uses a sensor FSR (Force Sensitive Resistance) to detect the movement of your feet and accelerometer to detect movement and transfer of a person when walking. The output of the two sensors in the form of data analog, so it takes the ADC (Analog to Digital Converter) to convert the data obtained into digital data by using microcontroller ATMega328. When the FSR and Accelerometer sensor reads the movement or ADC provides certain value, then the microcontroller ATMega328 will convert and will be counted up to the maximum value. The result of the counter is then sent to the Smartphone via Bluetooth HC-05.
In the Android application will display the number of steps by a person's leg. The test results from this tool shows that the value of the error of this wearable pedometer system amounted to 0% and when The test results from this tool shows that the value of the error of this pedometer wearable system amounted 2,75% compared with other pedometer. When the wearable pedometer system being tested to 5 people with different leg size, the test result shows that the value of the error of this wearable pedometer system amounted to 11,15%.
xii
xiii
KATA PENGANTAR
Puji syukur penulis panjatkan kehadirat Allah SWT yang selalu memberikan rahmat dan hidayah-Nya sehingga Tugas Akhir ini dapat terselesaikan dengan baik. Shalawat serta salam semoga selalu dilimpahkan kepada Rasulullah Muhammad SAW, keluarga, sahabat, dan umat muslim yang senantiasa meneladani beliau.
Tugas Akhir ini disusun untuk memenuhi sebagian persyaratan guna menyelesaikan pendidikan Diploma 3 pada Program Studi D3 Teknik Elektro , Jurusan Teknik Elektro, Fakultas Teknologi Industri, Institut Teknologi Sepuluh Nopember Surabaya dengan judul:
PEMBUATAN SISTEM WEARABLE PEDOMETER DENGAN
DISPLAY PADA SISTEM ANDROID
Dalam Tugas Akhir ini dibuat sistem pedometer yang Wearable dengan menggunakan ATMega 328 sebagai otak dari alat ini, untuk menampilkan data yang telah diperoleh dari ATMega 328 akan ditampilkan dengan Display pada sistem Android.
Penulis mengucapkan terima kasih kepada Ibu dan Bapak penulis yang memberikan berbagai bentuk doa serta dukungan tulus tiada henti, Bapak Suwito, S.T., MT. atas segala bimbingan ilmu, moral, dan spiritual dari awal hingga terselesaikannya Tugas Akhir ini, Penulis juga mengucapkan banyak terima kasih kepada semua pihak yang telah membantu baik secara langsung maupun tidak langsung dalam proses penyelesaian Tugas Akhir ini.
Penulis menyadari dan memohon maaf atas segala kekurangan pada Tugas Akhir ini. Akhir kata, semoga Tugas Akhir ini dapat bermanfaat dalam pengembangan keilmuan di kemudian hari.
Surabaya, 01 Juni 2016
xiv
xv
DAFTAR ISI
HALAMAN
HALAMAN JUDUL ... i
HALAMAN JUDUL ... iii
PERNYATAAN KEASLIAN TUGAS AKHIR ... v
HALAMAN PENGESAHAN ... vii
2.2.1 Sensor FSR (Force Sensitive Resistance) ... 6
2.2.2 Accelerometer... 6
2.2.3 Bluetooth ... 16
2.2.4 ADC (Analog to Digital Converter) pada Minimum System ATMega ... 17
BAB III PERANCANGAN SISTEM ... 21
3.1 Pembuatan Perangkat Mekanik ... 22
3.1.1 Desain Alat ... 22
3.1.2 Perancangan Alat ... 25
xvi
3.2.1 Wiring Bluetooth HC 05 Dengan Minimum System
ATMega 328 ... 28
3.2.2 Wiring Rangkaian Antara Sensor FSR Dan ATMega 32829 3.2.3 WiringAccelerometer Dengan ATMega 328 ... 30
3.2.4 Baterai Li-Po ... 33
3.3 Pembuatan Perangkat Lunak ... 35
3.3.1 Pembuatan Flowchart ... 35
3.3.2 Program Transmitter Receiver ... 37
3.3.3 Program Sensor FSR ... 38
3.3.4 Program Accelerometer... 39
3.3.5 Program Android ... 41
BAB IV HASIL PENGUJIAN SISTEM ... 45
4.1 Hasil Analisa Dari Pengujian Setiap Komponen ... 45
4.1.1 Pengujian Sensor FSR ... 45
4.1.2 Pengujian Sensor Accelerometer ... 47
4.1.3 Pengujian Modul Bluetooth HC-05 ... 49
4.2 Pengujian Dari Sistem Wearable Pedometer ... 51
4.3 Hasil Perbandingan Sistem Wearable Pedometer Dengan Pedometer Lain ... 53
4.3.1 Perbandingan Sistem Wearable Pedometer Dengan Smartwatch Pedometer ... 54
4.3.2 Perbandingan Sistem Wearable Pedometer Dengan Pedometer Merek Cina... 55
4.4 Pengujian Sistem Wearable Pedometer Dengan Berlari ... 59
4.5 Pengujian Sistem Android Pada Smartphone ... 60
xvii
DAFTAR GAMBAR
HALAMAN
Gambar 2.1 Pengintegralan Sederhana Terhadap Suatu Sinyal ... 7
Gambar 2.2 Spring Mass ... 8
Gambar 2.3 Pengukuran Percepatan Pada Spring Mass System ... 8
Gambar 2.4 Accelerometer Kapasitif ... 10
Gambar 2.5 Konstruksi Kapasitor ... 10
Gambar 2.6 Blok Rangkaian Pengukur Perubahan Kapasitansi ... 12
Gambar 2.7 Proses Pencuplikan Pada ADC ... 17
Gambar 2.8 Proses Peng-kuatisasi-an Pada ADC ... 18
Gambar 2.9 Proses Pengkodean Pada ADC ... 18
Gambar 2.10 Tampilan Awal Dari MIT APP Inventor ... 19
Gambar 3.1 Diagram Blok Sistem Wearable Pedometer ... 21
Gambar 3.2 Desain Alat Pada Sepatu ... 23
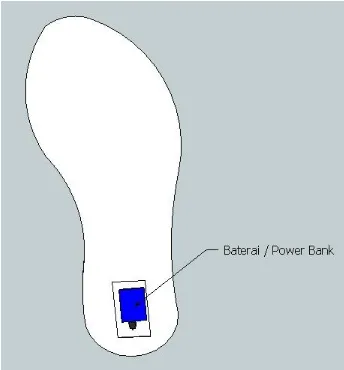
Gambar 3.3 Bagian Alas Sepatu Untuk Tempat Baterai Li-Po ... 23
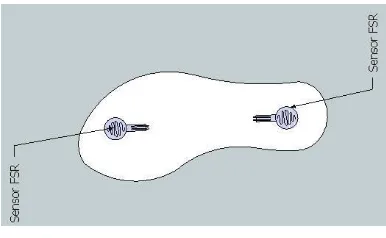
Gambar 3.4 Bagian Alas Sepatu Untuk Peletakkan Sensor FSR ... 24
Gambar 3.5 Bagian Luar Sepatu Untuk Tempat Minimum Sistem, Bluetooth Dan Sensor Accelerometer Tampak Atas ... 24
Gambar 3.6 Bagian Luar Sepatu Untuk Tempat Minimum Sistem, Bluetooth Dan Sensor Accelerometer Tampak Samping 24 Gambar 3.7 Diagram Blok Dari Perancangan Alat Pedometer ... 25
Gambar 3.8 Skematik Dari Sistem Pedometer ... 26
Gambar 3.9 Board Dari Sistem Pedometer... 26
Gambar 3.10 Letak Pin ATMega ... 27
Gambar 3.11 Bentuk Fisik Modul Bluetooth HC 05 ... 28
Gambar 3.12 Letak Pin Bluetooth HC 05 ... 28
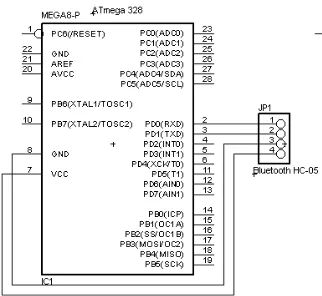
Gambar 3.13 WiringBluetooth HC 05 Dengan ATMega 328 ... 29
Gambar 3.14 Bentuk Fisik Sensor FSR ... 30
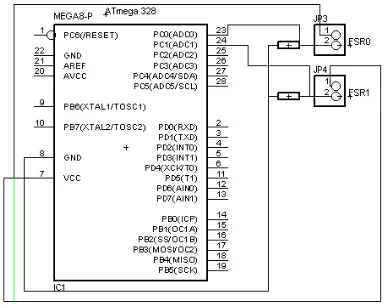
Gambar 3.15 Wiring Rangkaian Sensor Dengan Minimum Sistem ATMega 328 ... 30
Gambar 3.16 Accelerometer Sebagai Tilt Sensor ... 31
Gambar 3.17 Letak Pin Accelerometer ... 32
Gambar 3.18 Wiring Accelerometer Dengan Minimum Sistem AT-Mega 328 ... 33
xviii
Gambar 3.20 Wiring Baterai Dengan Minimum System ATMega 328
Dan Regulator AMS 1117 ... 34
Gambar 3.21 Rangkaian AMS 1117 5v Dan 3,3 v ... 35
Gambar 3.22 Flowchart Dari Sistem Pedometer ... 36
Gambar 3.23 Program Inisialisasi Awal ... 37
Gambar 3.24 Program Pada Void Setup ... 37
Gambar 3.25 Program Receiver Pada Bagian Void Loop ... 37
Gambar 3.26 Program Transmitter Pada Bagian Void Loop ... 38
Gambar 3.27 Program Sensor FSR ... 38
Gambar 3.28 Program Deklarasi Awal Accelerometer ... 39
Gambar 3.29 Program Kalibrasi Accelerometer ... 39
Gambar 3.30 Program Accelerometer ... 40
Gambar 3.31 Program Aplikasi Android ... 41
Gambar 3.32 Block Diagram Untuk Connect Dan Disconnect Bluetooth ... 42
Gambar 3.33 Block Diagram Untuk Memulai Penghitungan Langkah Kaki ... 42
Gambar 3.34 Block Diagram Sistem Pedometer ... 43
Gambar 3.35 Block Diagram Untuk Reset Sistem Pedometer ... 43
Gambar 4.1 Rangkaian Sensor FSR ... 45
Gambar 4.2 Grafik Hasil Pembacaan ADC Dari Sensor FSR ... 47
Gambar 4.3 Koordinat Dari 3 Axis Accelerometer ... 47
Gambar 4.4 Posisi Pembacaan Sensor Dari Accelerometer ... 48
Gambar 4.5 Uji Coba Sistem Pada Ankle Support ... 51
Gambar 4.6 Uji Coba Sistem Pada Sepatu Biasa ... 51
Gambar 4.7 Uji Coba Sistem Pada Sepatu Sport ... 52
Gambar 4.8 Tampilan Aplikasi Ketika Sudah Terkoneksi ... 60
Gambar 4.9 Tampilan Aplikasi Ketika Tidak Terkoneksi ... 60
Gambar 4.10 Tampilan Aplikasi Dengan Batas Langkah 5 ... 61
Gambar 4.11 Tampilan Aplikasi Ketika Langkah Seseorang Lebih Dari Batas Langkah ... 62
xix
DAFTAR TABEL
HALAMAN Tabel 3.1 Spesifikasi Sensor Accelerometer ... 31 Tabel 4.1 Hasil Pembacaan ADC Dengan Sensor FSR ... 46 Tabel 4.2 Data Yang Didapat Dari Accelerometer ... 48 Tabel 4.3 Data Uji Coba Sensor Accelerometer Pada Punggung
Kaki ... 49 Tabel 4.4 Pengujian Jarak Bluetooth HC-05 Tanpa Halangan ... 50 Tabel 4.5 Pengujian Jarak Bluetooth HC-05 Dengan Halangan ... 50 Tabel 4.6 Hasil Data Dari Pembacaan Sistem Wearable Pedometer .. 52 Tabel 4.7 Hasil Presentase Error Dari Sistem Wearable Pedometer . 53 Tabel 4.8 Hasil Penghitung Langkah Kaki Seseorang Dengan
Smartwatch Pedometer ... 54 Tabel 4.9 Hasil Presentase Error Dari Smartwatch Pedometer ... 54 Tabel 4.10 Hasil Penghitung Langkah Kaki Seseorang Dengan
Pedometer Merek Cina ... 56 Tabel 4.11 Hasil Presentase Error Dari Pedometer Merek Cina ... 56 Tabel 4.12 Hasil Perbandingan Data Dari Pembacaan Alat
Pedometer ... 57 Tabel 4.13 Hasil Perbandingan Error Dari Pembacaan Alat
Pedometer ... 58 Tabel 4.14 Hasil Pengujian Sistem Wearable Pedometer Saat Berlari 59
xx
1
1
BAB I
PENDAHULUAN
PENDAHULUAN
1.1 Latar Belakang
Masyarakat kurang menyadari penyebab utama dari Osteoprorosis yaitu pola hidup yang kurang sehat dan jarang berolahraga. Sedikitnya dua dari lima orang di Indonesia berisiko terkena osteoporosis terutama kaum wanita akibat kekurangan 50 persen kalsium yang berperan penting dalam menjaga kesehatan tulang. "Osteoporosis terjadi karena sebagian besar perempuan Indonesia kekurangan kalsium 50% setiap harinya. Ini riset yang dilakukan
Seameo Tropmed Regional Center for Community Nutrition, Universitas Indonesia dan University of Otago, Selandia Baru" ungkap Vienno Monintja, Marketing Director PT. Fonterra Brands Indonesia. [1] (sumber:http://www.tribunnews.com/kesehatan/2011/11/28/pemenuhan - kalsium-perempuan-indonesia-hanya-50-persen).
Peningkatan penyerapan kalsium dapat dilakukan salah satunya dengan berjalan kaki secara rutin, terutama bagi penderita osteoporosis. Namun kebanyakan penderita tidak tertarik dan menganggap remeh berjalan kaki yang sesuai standart. Salah satu manfaat jalan kaki untuk menyehatkan tulang dalam hal penyerapan kalsium. Tak cukup ekstra kalsium dan vitamin D saja untuk mencegah atau memperlambat proses osteoporosis. Tubuh juga membutuhkan gerak badan dan memerlukan waktu paling kurang 15 menit terpapar matahari pagi agar terbebas dari ancaman osteoporosis.(M.Nelson dkk, 1991). Mereka yang melakukan gerak badan sejak muda, dan cukup mengonsumsi kalsium, sampai usia 70 tahun diperkirakan masih bisa terbebas dari ancaman pengeroposan tulang. Dengan berjalan kaki 10.000 langkah sebagai salah satu terobosan menuju Indonesia Sehat adalah salah satu upaya untuk mengurangi resiko osteoporosis. (National Institute of Health (NIH), 2000). Karena penderita tidak dapat menghitung jumlah langkah kaki mereka secara akurat, akibatnya pun mereka merasa malas untuk berjalan kaki.
Oleh karena itu pada Tugas Akhir ini kami membuat suatu alat yang memanfaatkan teknologi Android untuk mendeteksi dan menghitung langkah kaki seseorang dengan metode penghitungan gerak dari telapak kaki dan perpindahan tubuh dengan menggunakan sensor tekanan dan Accelerometer. Output dari kedua sensor ini berupa data
2
menggunakan Mikrokontroller AT Mega 328 sebagai otak dari alat ini. Selain sebagai ADC Mikrokontroller, AT Mega 328 ini juga sebagai
counter atau penghitung jumlah langkah kaki sehingga dibuat minimum system dan program yang sesuai. Pergerakan dari telapak kaki dan perpindahan tubuh seseorang yang dideteksi oleh Accelerometer akan dihitung sampai nilai tertentu sehingga data yang akan dikirim pada smrtphone melalui modul Bluetooth HC 05 adalah hasil counter dari kedua sensor tersebut dan akan ditampilkan pada Smartphone yang berbasis Android. Pada aplikasi Android tersebut akan menampilkan jumlah langkah kaki seseorang dan indikator kesehatan langkah kaki tiap harinya. Pada aplikasi ini pengguna dapat menentukan batasan jumlah langkah kaki mereka pada setiap harinya. Dari perancangan alat tersebut diharapkan dapat membantu masyarakat umum atau para penderita Osteoporosis untuk meningkatkan antusiasme seseorang untuk berjalan kaki dan mengetahui langkah kaki mereka agar sesuai dengan standart kesehatan dengan menggunakan alat yang praktis dan aplikatif.
1.2 Permasalahan
Pada saat ini, alat penghitung langkah kaki atau pedometer yang pembacaannya tidak akurat dikarenakan penempatan pedometer yang kurang tepat, sehingga pedometer tidak dapat menghitung langkah kaki seseorang yang sebenarnya. Selain itu, data yang telah terbaca oleh pedometer belum diolah atau diklasifikasikan pada indikator kesehatan untuk standart langkah kaki pada tiap harinya.
1.3 Batasan Masalah
Pembuatan pedometer yang diletakkan pada telapak kaki dengan menggunakan sensor yang lowcost serta Wearable dengan nilai pembacaan langkah kaki yang lebih akurat.
1.4 Tujuan
3
1.5 Metodologi Penelitian
Penelitian ini dilakukan melalui beberapa tahapan metodologi, yaitu, studi literatur, perancangan sistem, simulasi hasil desain, implementasi dan analisis data, dan yang terakhir adalah penyusunan laporan berupa buku Tugas Akhir.
Pada tahap studi literatur akan dipelajari mengenai identifikasi sensor FSR, Identifikasi Accelerometer, identifikasi ATMega 328,
Bluetooth HC-05 dan sistem Android. Pada tahap perancangan system
akan dibahas mengenai pembuatan perangkat elektonik, pembuatan
Software, dan pembuatan perangkat mekanik. Pada tahap simulasi hasil desain akan disimulasikan cara kerja dari sistem pedometer dengan menggunakan sensor FSR dan Accelerometer pada aplikasi Android. Yang terakhir adalah implementasi dan analisis data, setelah dilakukan simulasi, data percobaan yang telah diperoleh selanjutnya akan dianalisis. Dari hasil analisis, akan ditarik kesimpulan dari penelitian yang telah dilakukan. Tahap akhir penelitian adalah penyusunan laporan penelitian.
1.6 Sistematika Laporan
Pembahasan Tugas Akhir ini akan dibagi menjadi lima Bab dengan sistematika sebagai berikut:
Bab I Pendahuluan
Bab ini meliputi latar belakang, permasalahan, tujuan penelitian, metodologi penelitian, sistematika laporan, dan relevansi.
Bab II Teori Dasar
Bab ini menjelaskan tentang tinjauan pustaka, konsep sensor force sensitive resistance, Accelerometer,
Bluetooth HC-05 dan Minimum System AT-Mega 328
Bab III Perancangan Sistem
4
Bab IV Implementasi dan Analisis Sistem
Bab ini memuat hasil simulasi dan implementasi serta analisis dari hasil tersebut.
Bab V Penutup
Bab ini berisi kesimpulan dan saran dari hasil pembahasan yang telah diperoleh.
1.7 Relevansi
5
2
BAB II
TEORI DASAR
TEORI DASAR
2.1 Tinjauan Pustaka
Ada beberapa metode yang pernah diusulkan untuk mengetahui penghitungan langkah kaki seseorang yang sebenarnya. Di antaranya menggunakan Metode Magnitude dan Variance Threshold. Alat ini menggunakan sensor Accelerometer 3axis Hitachi H48C, yang merupakan komponen utama dalam alat ini. Sinyal keluaran sensor yang berupa percepatan sumbu x,y dan z akan diolah menggunakan metode magnitude dan variance threshold agar dapat mendeteksi suatu langkah. Alat ini menggunakan ATMega 16 sebagai otak dari alat ini, keypad
4x16 sebagai masukan ke mikrokontroler, LCD 16x2 sebagai penampil dan buzzer sebagai indikator pendeteksi langkah. Hasil dari Alat penghitung langkah kaki ini dapat mendeteksi langkah kaki secara akurat, dengan pengujian 100 langkah didapatkan Error sama dengan 40%. Masalah yang dialami dari metode ini adalah pedometer terkadang keliru dalam mencatat pergerakan seseorang. Pergerakan lain seperti membungkuk untuk mengikat tali sepatu dan guncangan di jalan saat mengendarai kendaraan juga terhitung oleh pedometer, walaupun untuk
alat yang lebih canggih “langkah palsu” tersebut cenderung lebih sedikit
6
yang ada, khususnya saat berjalan dengan kecepatan yang rendah dengan lingkungan yang tidak menentu.
Pada Tugas Akhir ini akan dilakukan pembuatan sistem
Wearable pedometer dengan Display pada sistem Android. Teori dasar yang digunakan seperti pada [2] dan aplikasi Android yang telah dirancang sesuai dengan kebutuhan. Hasil yang diharapkan dari penggabungan metode ini adalah memperoleh hasil penghitungan yang mampu menghitung langkah kaki seseorang yang sebenarnya dan pergerakan selain langkah kaki. Selain itu, alat pedometer ini merupakan alat yang lowcost dengan menerapkan sesnsor FSR dan Accelerometer
pada media sepatu, diharapkan juga dapat membantu masyarakat dan penderita osteoporosis dalam menghitung langkah kaki mereka setiap harinya.
2.2 Teori Dasar
2.2.1 Sensor FSR (Force Sensitive Resistance)
Force Resistive Resistor atau disebut sebagai FSR ini merupakan sebuah sensor tekanan yang akan memiliki resistansi yang berubah-ubah sesuai dengan besarnya pressure atau tekanan yang diberikan pada area sensornya. Ketika tidak ada tekanan, sensor terlihat seperti resistor yang tak terbatas (rangkaian terbuka). Sensor FSR terbuat dari 2 lapisan dipisahkan oleh spacer. Perangkat ini dibuat dengan bahan elastis dalam empat lapisan, yang terdiri dari Sebuah lapisan isolasi plastik elektrik, Daerah yang aktif yang terdiri dari pola konduktor yang terhubung ke lead pada ekor untuk dikenakan dengan tegangan listrik, Sebuah spacer plastik, serta ventilasi udara melalui ekor. Sebuah substrat fleksibel dilapisi dengan lapisan konduktif polimer tebal. FSR
pada dasarnya resistor yang mengubah nilai resistif (dalam ohm Ω)
tergantung pada berapa banyak ditekan. Sensor ini memiliki haraga pasaran yang cukup murah, dan mudah digunakan, tetapi sensor ini memiliki nilai akurasi yang cukup rendah dengan nilai akurasi kurang lebih 10%.
2.2.2 Accelerometer
7
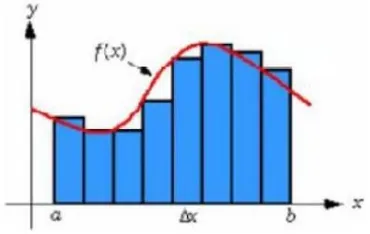
Bergantung pada arah/orientasi karena merupakan penurunan kecepatan yang merupakan besaran vektor. Berubahnya arah pergerakan suatu benda akan menimbulkan percepatan pula. Untuk memperoleh data jarak dari sensor accelerometer, diperlukan proses integral ganda terhadap keluaran sensor.
s = (∫( ∫(a))dt)dt
... (2.1) Proses penghitungan ini dipengaruhi oleh waktu cuplik data, sehingga jeda waktu cuplik data (dt) harus selalu konstan dan dibuat sekecil mungkin. Secara sederhana, integral merupakan luas daerah di bawah suatu sinyal selama rentang waktu tertentu seperti pada Gambar 2.1.Accelerometer adalah sebuah perangkat yang berfungsi untuk mendeteksi dan mengukur percepatan. Keluaran yang dihasilkan biasanya berupa besaran listrik yang proposional terhadap perubahan dari percepatan yang diukur. Percepatan dapat didefinisikan sebagai rata-rata perubahan kecepatan dari suatu benda atau objek. Kecepatan dari suatu objek hanya akan berubah jika ada suatu gaya yang bekerja terhadap objek tersebut. Jika tidak ada gaya yang bekerja maka kecepatannya akan konstan dan percepatannya sama dengan nol. Gaya yang menyebabkan adanya percepatan yaitu gaya statik seperti gaya gravitasi dan gaya dinamik seperti gaya dari luar. Besarnya percepatan (a) dapat dihitung dengan Persamaan (2.2) dan (2.3) dibawah ini.
ma
F ... (2.2)
m F
a ... (2.3)
8
Di mana F adalah gaya yang bekerja pada objek yang bermassa m. Satuan SI untuk percepatan adalah m/ . Satuan lainnya yang sering digunakan adalah g-force (g) dan 1 g sama dengan 9.80665 m/ .Accelerometer tidak hanya dapat mengukur percepatan tetapi dapat juga mengukur beberapa gaya seperti getaran, rotasi dan kemiringan/sudut yang menyebabkan adanya percepatan.
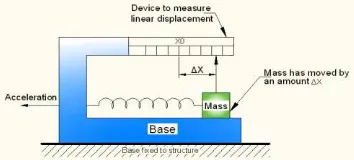
Prinsip kerja dari sensor ini secara umum dalam mengukur percepatan dapat dijelaskan menggunakan spring mass system yang berdasarkan hukum Newton yaitu hubungan antara gaya dan percepatan (F = ma) dan hukum Hooke yaitu hubungan antara gaya dan aksi dari pegas (F = k.Δx).
Spring mass system bisa dilihat pada Gambar 2.2. Sistem ini digunakan untuk mengukur adanya percepatan pada massa yang dihubungkan ke base dengan sebuah pegas. Pada sistem juga dilengkapi sebuah sensor (variable resistor) untuk mengetahui adanya pergerakan atau pergesesan pada massa. Ketika sebuah gaya dari luar yang menyebabkan pergeseran pada massa maka panjang dari pegas juga akan mengalami perubahan sebesar ∆x, seperti pada Gambar 2.3.
Gambar 2.2 Spring Mass
9
Besarnya pergeseran ∆x proposional terhadap nilai dari x0 (variable resistor). Berdasarkan hukum Newton dan Hooke, maka percepatan dapat dihitung dengan persamaan (2.4) dan (2.5),
k.Δx = ma ... (2.4) yang pembuatannya berbeda-beda. Beberapa accelerometer
menggunakan piezoelektrik yang terdiri dari
struktur kristal mikroskopis. Kristal yang terdapat pada accelerometer
jenis ini mengeluarkan tegangan yang selanjutnya dikonversi menjadi percepatan. Cara lainnya yaitu menggunakan prinsip kapasitor dimana perubahan kapasitansinya proposional terhadap percepatan. Antarmuka kapasitif mememiliki fitur yang menarik untuk dimanfaatkan.
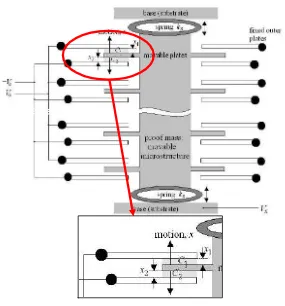
Dalam teknologi MEMS paling tidak atau minimal ada pemrosesan tambahan agar kapasitor dapat beroperasi baik sebagai sensor maupun aktuator. Prinsip kerja dari MEMS accelerometer
kapasitif ditunjukkan pada Gambar 2.4.
10
Gambar 2.4 Accelerometer Kapasitif
A
11
ε = permitifitas bahan dielektrik
Mekanisme dari MEMS accelerometer terdiri dari plat yang bisa bergerak dan plat yang tetap. Defleksi pada massa diukur perbedaan kapasitansinya. Kapasitansi antara plat yang bisa bergerak dan plat tetap (C1 dan C2) tergantung pada pergeseran dari x1 dan x2. Dimana Persamaannya dapat dilihat pada Persamaan (2.8) dan (2.9),
C
x1=x2. Jika x≠0, maka a≠0 sehingga perbedaan kapasitansi dapat dicari dengan Persamaan (2.10), menggunakan Persamaan kuadrat , melalui Persamaan (2.11).0
22
Cx
Ax
Cd
... (2.11)Persamaan tersebut bisa disederhanakan untuk pergeseran yang sangat kecil sehingga Persamaannya menjadi,
12
parallel untuk kapasitansi C1 dan semua kapasitor bagian bawah juga di rangkai secara parallel untuk kapasitansi C2. Persamaan (2.12) digunakan untuk mengukur semua kapasitor. Rangkaian yang digunakan untuk mengukur perubahan kapasitansi ditunjukkan pada Gambar 2.6.
Gambar 2.6 Blok Rangkaian Pengukur Perubahan Kapasitansi
Bagian yang tetap atau tidak bergerak pada sensor di dicatu oleh tegangan berbentuk gelombang kotak 1 MHz dengan amplitudo Vo dari oscillator. Perbedaan fase antara antara keduanya adalah 180°. Untuk mencari nilai Vx menggunakan Persamaan (2.13),
0 ) ( )
(VxV0 C1 VxV0 C2 ... (2.13) Jika Persamaan diatas diturunkan, maka akan diperoleh Persamaan (2.14) yang menyatakan hubungan antara Vx dan x.
0 Dimana Vx adalah tegangan keluaran yang dihasilkan sebelum dimodulasi, x adalah pergeseran dan d adalah lebar celah ketika x=0.
13
Secara umum, sensor Accelerometer mempunyai beberapa spesifikasi dasar, yaitu:
a. Analog vs. digital
Spesifikasi yang paling penting dari accelerometer adalah jenis keluarannya. Keluaran dari accelerometer dibagi menjadi keluaran analog dan digital. Keluaran digital biasanya berupa pulse witdh modulation (PWM).
b. Number of Axis
Parameter ini merupakan spesifikasi dari banyaknya sumbu yang dapat diukur. Accelerometer bisa digunakan untuk mendeteksi percepatan untuk sumbu x, y dan z. Accelerometer ada yang tersedia dalam 1 , 2 dan 3 sumbu.
c. Output Range
Parameter ini merupakan spesifikasi dari jangkauan pengukuran percepatan yang dapat diukur oleh sensor dan biasanya dinyatakan dalam ±g. +1g menyatakan posisi diam sensor searah dengan arah vertikal bumi dan menghadap ke atas. 0g menyatakan posisi diam sensor searah dengan arah horizontal bumi.+1g menyatakan posisi diam sensor searah dengan arah vertikal bumi dan menghadap ke atas.
d. Linearitas
Selisih maksimum dari kurva antara tegangan yang dihasilkan dan gravitasi dengan garis lurus.
e. Sensitivitas
14
Ada beberapa metode untuk melakukan pembacaan sudut kemiringan, yaitu:
1. Measuring Tilt Using One Axis
Pada metode ini dapat menggunakan Persamaan (2.17) dan (2.18) untuk mengetahui nilai dari percepatan sumbu X dan kemiringan sudut dalam satuan radian.
Ax = percepatan sumbu X dalam g (gravitasi)
Θ = kemiringan (sudut) dalam radian S = sensitivitas dalam V/g
2. Measuring Tilt Using Two Axis Solution
Pada metode ini untuk mengetahui nilai dari sumbu y dan sumbu z serta kemiringan sudut dapat menggunakan Persamaan (2.19), (2.20) dan (2.21).
Ay = percepatan sumbu Y dalam g (gravitasi) Az = percepatan sumbu Z dalam g (gravitasi)
Θ = kemiringan (sudut) dalam radian S = sensitivitas dalam V/g
3. Measuring Tilt Using Three Axis Solution
Pada metode ini untuk mengetahui nilai percepatan sumbu X yang ada pada Accelerometer dapat menggunakan Persamaan (2.22), untuk mengetahui nilai percepatan sumbu Y yang ada pada
15
dapat menggunakan Persamaan (2.24), dan untuk mengetahui nilai kemiringannya dapat menggunakan Persamaan (2.25), (2.26) dan (2.27).
Ax = percepatan sumbu X dalam g (gravitasi) Ay = percepatan sumbu Y dalam g (gravitasi) Az = percepatan sumbu Z dalam g (gravitasi)
, , = kemiringan (sudut) dalam radian S = sensitivitas dalam V/g
Pada dasarnya jika mengacu spesifikasi dari datasheet sensor seharusnya sudah dapat menghasilkan pembacaan kemiringan dalam satuan derajat yang sudah presisi. Tapi dikarenakan adanya beberapa kelemahan yang disebabkan oleh berbagai faktor seperti pengaruh suhu, mekanik dan umur (age) dari sensor sehingga menyebabkan adanya pembacaan dari sensor tidak akurat dan juga karena adanya ketidaklinearan dari sensor. Untuk menghilangkan ketidaklinearan sensor dan adanya kelemahan seperti yang diatas, maka perlu dilakukan kalibrasi (auto zero) agar pembacaan sensor lebih akurat. Ada beberapa metode untuk melakukan kalibrasi diantaranya:
1. Manual 0g X, Y, Z FullRangeCalibration
16 3. Freefall Calibration
4. Simple 0g X, 0g Y, +1g Z Calibration
Pada Tugas Akhir ini akan menggunakan metode pertama yaitu
“Manual 0g X, Y, Z Full Range Calibration” dengan alasan metoda ini memberikan hasil yang lebih akurat meskipun dalam proses pengambilan data paling lama. Pada kalibrasi ini data ADC setiap sumbu X, Y dan Z diambil nilai 1g (earth gravitation atau one gravitation dan,-1g (berlawanan dengan gravitasi bumi), rata-rata dari kedua nilai tersebut merupakan nilai pada saat 0g (offset) sedangkan nilai selisih ADC antara 1g dengan -1g adalah Sensitivitas (S)).
2.2.3 Bluetooth
Bluetooth adalah spesifikasi industri untuk jaringan kawasan pribadi juga (Personal Arena Network/PDA) tanpa kabel, bluetooth
menghubungkan dan dipakai untuk melakukan tukar menukar informasi di antara peralatan-peralatan elektronik. Bluetooth Module merupakan modul komunikasi nirkabel pada frekuensi 2.4GHz dengan pilihan koneksi bisa sebagai slave, ataupun sebagai master. Sangat mudah digunakan dengan mikrokontroler untuk membuat aplikasi wireless.
Bluetooth berfungsi untuk media komunikasi antar perangkat sehingga mempermudah pengiriman atau sharing file, audio bahkan video. Bluetooth sendiri sebenarnya diciptakan untuk menggatikan media kabel sebagai media perantara sehingga lebih praktis dan efisien. Bluetooth terdiri atas beberapa perakat pendukung seperti radio
transceiver, baseband link Management dan Control, Baseband (processor core, SRAM, UART, PCM USB Interface), flash dan voice codec. Perangkat - perangkat tersebut akan saling berhubungan satu sama lain sehingga bisa tercipta sebuah komunikasi. Baseband link controller menghubungkan perangkat keras radio ke baseband processing dan juga layer protokol fisik sedangkan Link manager akan melakukan aktivitas protokol tingkat tinggi, yaitu seperti melakukan link setup, autentikasi dan juga konfigurasi.
Interface yang digunakan adalah serial RXD, TXD, VCC dan GND. Built in LED sebagai indikator koneksi Bluetooth. Tegangan input
antara 3.6 ~ 6V. Arus saat unpaired sekitar 30mA, dan saat paired
17
jangkauan sebesar 10 meter, meskipun dapat mencapai lebih dari 10 meter, namun kualitas koneksi makin berkurang.
Penggunaan Bluetooth diantaranya:
1. PC to PC File Transfer. 2. PC to PC File Synchonization. 3. PC to PC Mobile Phone. 4. Wirelees Headseat.
2.2.4 ADC (Analog to Digital Converter) pada Minimum System
ATMega
Mikrokontroler adalah sebuah sistem komputer fungsional dalam sebuah chip. Di dalamnya terkandung inti prosesor, memori (sejumlah kecil RAM, memori program, atau keduanya), dan perlengkapan input output. Mikrokontroler adalah suatu alat elektronika digital yang mempunyai masukan dan keluaran serta kendali dengan program yang bisa ditulis dan dihapus dengan cara khusus, cara kerja mikrokontroler sebenarnya membaca dan menulis data. Dalam mikrokontroller terdapat proses ADC yang berfungsi sebagai mengkonversi data analog ke data digital.
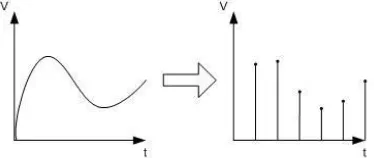
Analog to Digital Converter adalah suatu perangkat yang mengubah suatu data kontinu terhadap waktu (analog) menjadi suatu
Pencuplikan adalah proses mengambil suatu nilai pasti (diskrit) dalam suatu data kontinu dalam satu titik waktu tertentu dengan periode yang tetap. Untuk lebih jelasnya dapat dilihat pada ilustrasi Gambar 2.7 berikut:
18
Semakin besar frekuensi pen-cuplik-an, berarti semakin banyak data diskrit yang didapatkan, maka semakin cepat ADC tersebut memproses suatu data analog menjadi data digital.
Peng-kuantisasi-an adalah proses pengelompokan data diskrit yang didapatkan pada proses pertama ke dalam kelompok-kelompok data. Kuantisasi, dalam matematika dan pemrosesan sinyal digital, adalah proses pemetaan nilai input seperti nilai pembulatan, Gambarnya adalah pada Gambar 2.8.
Semakin banyak kelompok-kelompok dalam proses kuantisasi, berarti semakin kecil selisih data diskrit yang didapatkan dari data analog, maka semakin teliti ADC tersebut memproses suatu data analog menjadi data digital.
Pengkodean adalah meng-kode-kan data hasil kuantisasi ke dalam bentuk digital (0/1) atau dalam suatu nilai biner yang ditunjukkan pada Gambar 2.9.
Gambar 2.8 Proses Peng-kuatisasi-an Pada ADC
19
Dengan: X1 = 11, X2 = 11, X3 = 10, X4 = 01, X5 = 01, X6 = 10. Secara matematis, proses ADC dapat dinyatakan dalam Persamaan: Data ADC = (Vin/Vref) x Maksimal Data Digital
Dengan Vref adalah jenjang tiap kelompok dalam proses kuantisasi,kemudian maksimal data digital berkaitan proses ke-3 (pengkodean). Sedangkan proses ke-1 adalah seberapa cepat data ADC dihasilkan dalam satu kali proses.
F. MIT APP Inventor 2
APP Inventor adalah sebuah aplikasi builder untuk membuat aplikasi yang berjalan di sistem operasi Android yang disediakan oleh googlelabs. App Inventor ini menggunakan teknik visual programming, berbentuk seperti susunan puzzle-puzzle yang memiliki logika tertentu. Pada Gambar 2.10 menunjukkan tampilan awal dari Sofware MIT APP Inventor 2, serta dijelaskan mengenai beberapa toolbar yang ada.
20
21
3
BAB III
PERANCANGAN SISTEMPERANCANGAN SISTEM
Pada bab ini berisi tentang bagaimana tahapan yang dilakukan dalam perencanaan dan pembuatan Tugas Akhir. Penjelasan diawali dengan penjelasan block fungsional sistem secara keseluruhan, kemudian perancangan perangkat keras dan diakhiri dengan perangkat lunak. Adapun perancangan perangkat keras dilakukan pada perancangan mekanik dan elektronik yang ditampilkan pada Gambar 3.1.
Adapun penjelasan dari diagram block pada Gambar 3.1 dan juga merupakan tahapan untuk merancang sistem, hasil dari sensor FSR dan
Accelerometer akan diproses oleh ATMega 328 untuk diubah dari data
analog ke data digital kemudian data hasil converter tersebut akan diolah kedalam program counter. Hasil dari counter akan ditampilkan ke
Smartphone melalui Bluetooth HC-05 yang kemudian akan ditampilkan pada sistem Android. Aplikasi Android berfungsi sebagai interface, terdapat tombol-tombol untuk membantu pengguna pedometer dalam pengoperasiannya. Data dari tombol yang telah ditekan pada aplikasi Android akan dikirimkan ke mikrokontroler melalui Bluetooth HC-05.
Untuk mendapatkan alat penghitung langkah kaki (pedometer) yang berjalan sesuai harapan, diperlukan bagian pokok, yaitu:
1. Sensor FSR, yang berfungsi untuk menetukan posisi telapak kaki bagian depan dan belakang (tumit).
2. Accelerometer, yang berfungsi untuk menentukan pergerakan dari kaki ketika diam dan bergerak.
3. ATMega 328, yang berfungsi untuk menyimpan program yang akan digunakan untuk menghitung langkah kaki seseorang yang sebenarnya. Port yang digunakan pada ATMega 328 ini adalah port analog, port input output, port Vin, port 5V, dan port GND.
Gambar 3.1 Diagram Blok Sistem Wearable Pedometer
22
4. Modul Bluetooth HC 05, yang berfungsi untuk mengirimkan data yang diterima oleh ATMega 328 pada Smartphone.
5. Aplikasi Android, yang berguna untuk menampilkan data hasil penghitungan dari alat. Software yang digunakan untuk membuat aplikasi pedometer adalah MIT APP Inventor 2
6. Komunikasi serial, berfungsi untuk membaca dan mengirimkan data secara serial dari mikrokontroler ke Android maupun dari Android ke mikrokontroler.
7. Power supply, power supply digunakan untuk memberikan sumber pada tiap sensor dan minimum
3.1 Pembuatan Perangkat Mekanik
Dalam perangkat mekanik, terdapat beberapa bagian yang harus dibuat untuk dapat bekerja dengan baik. Pembuatan perangkat mekanik pada sistem ini terbagi menjadi beberapa bagian diantaranya adalah desain alat serta perancangan alat. Berikut tahapan-tahapan pembuatan perangkat mekaniknya:
3.1.1 Desain Alat
Desain alat sistem Wearable pedometer adalah dengan menggunakan media sepatu, untuk memberikan kenyaman dan kepraktisan pada pengguna. Serta keefektifan dari output sensor yang digunakan akan lebih akurat. Berikut merupakan desain alat dari sistem
23
Gambar 3.2 Desain Alat Pada Sepatu
24
Gambar 3.4 Bagian Alas Sepatu Untuk Peletakkan Sensor FSR
Gambar 3.5 Bagian Luar Sepatu Untuk Tempat Minimum Sistem, Bluetooth Dan Sensor Accelerometer Tampak Atas
25
Desain seperti diatas dapat diketahui bahwa output sensor
Accelerometer pada sumbu Y akan lebih akurat, sehingga alat dapat membedakan antara jalan detempat, posisi kaki jinjit serta langkah kaki yang sebenarnya. Untuk menentukan perbedaan langkah tersebut
Accelerometer tidak bekerja sendiri, Accelerometer dibantu dengan 2 sensor FSR yang diletakkan pada telapak kaki bagian belakang dan bagian depan sehingga dapat mengetahui posisi kaki yang sesungguhnya.
3.1.2 Perancangan Alat
Pada proses ini akan dirancang suatu sistem Wearable pedometer dengan menggunakan beberapa komponen yang dibutuhkan seperti
Bluetooth HC-05, Accelerometer, sensor FSR, regulator AMS 1117 pada
Minimum Sistem ATMega 328 dengan supply Baterai Li-Po 7,4 volt dengan kapasitas 1000 maH. Diagram block dari perancangan sistem dapat dilihat pada Gambar 3.7.
Setelah proses penggabungan komponen seperti pada Gambar 3.7 maka akan dibuat jalur pada PCB polos dengan menggunakan komponen SMD untuk meminimalkan ukuran dari Minimum system
yang akan digunakan. Hasil dari wiring menggunakan Software eagle pada Gambar 3.8 dan board dari sistem tersebut ditunujukkan pada Gambar 3.9.
26
Gambar 3.8 Skematik Dari Sistem Pedometer
27
3.2 Pembuatan Perangkat Elektronik
Dalam perangkat elektronik, terdapat beberapa elemen yang harus disusun untuk dapat menentukan Jumlah langkah kaki yang sebenarnya pada seseorang. Pada Gambar 3.10 menunjukakan konfigurasi letak pin ATMega 328 dimana komponen ini merupakan komponen utama dari sistem wearable pedometer.
ATMega328 adalah mikrokontroler keluaran dari atmel yang mempunyai arsitektur RISC (Reduce Instruction Set Computer) yang mana setiap proses eksekusi data lebih cepat dari pada arsitektur CISC (Completed Instruction Set Computer). Mikrokontroler ini memiliki beberapa fitur antara lain:
1. Memiliki EEPROM (Electrically Erasable Programmable Read
Only Memory) sebesar 1KB sebagai tempat penyimpanan data semi permanen karena EEPROM tetap dapat menyimpan data meskipun catu daya dimatikan.
2. Memiliki SRAM (Static Random Access Memory) sebesar 2KB.
yang menggunakan 2 KB dari flash memori sebagai bootloader.
7. 130 macam instruksi yang hampir semuanya dieksekusi dalam
satu siklus clock.
28
3.2.1 Wiring Bluetooth HC 05 Dengan Minimum System ATMega
328
Bluetooth merupakan media penghubung antara Smartphone
Android dengan AT Mega 328 dan sensor fsr serta Accelerometer. Modul Bluetooth yang digunakan adalah tipe HC-05 yang dapat berkomunikasi secara dua arah. Bluetooth Module HC-05 merupakan modul komunikasi nirkabel pada frekuensi 2.4GHz dengan pilihan koneksi bisa sebagai slave, ataupun sebagai master. Sangat mudah digunakan dengan mikrokontroler untuk membuat aplikasi wireless
.
Berikut merupakan bentuk fisik serta konfigurasi pin pada modul
Bluetooth HC-05 dapat dilihat pada Gambar 3.11.
Wiring Bluetooth dengan Minimum Sistem ATMega 328 yang ada pada Tugas Akhir ini adalah meliputi wiring pada sisi transmitter
dan receiver. Berikut adalah letak port pada Bluetooth HC 05 yang disebutkan pada Gambar 3.12 dan wiring Bluetooth HC 05 dengan ATMega 328 yang disebutkan pada Gambar 3.13.
Gambar 3.11 Bentuk Fisik Modul Bluetooth HC 05
29
Gambar 3.13 Wiring Bluetooth HC 05 Dengan ATMega 328 i. Port ATMega 328 ke Pin TX Bluetooth HC 05
Apabila Bluetooth HC 05 tersebut berfungsi sebagai transmitter, pin TX akan terus dalam posisi low sampai Arduino memerintahkan untuk mengirimkan data. Apabila data sudah terkirim dan Bluetooth HC 05 tidak sedang melakukan transmit data, Bluetooth HC 05 tersebut akan kembali low.
ii. Port 2 ATMega 328 ke pin RX Bluetooth HC 05
Apabila Bluetooth HC 05 tersebut berfungsi sebagai receiver, pin RX ini akan terus dalam posisi high baik dalam keadaan
3.2.2 Wiring Rangkaian Antara Sensor FSR Dan ATMega 328
30
Gambar 3.14 Bentuk Fisik Sensor FSR
Gambar 3.15 Wiring Rangkaian Sensor Dengan Minimum Sistem ATMega 328 i. Port 5V ATMega 328 ke kaki Positif pada FSR
ii. Port GND ATMega 328 ke kaki Ground pada FSR
iii. Port A0 ATMega 328 ke Kaki ground sesudah dipasang resistor pull down. Port analog berfungsi sebagai ADC (Analog to Digital Converter).
iv. Port A1 ATMega 328 ke kaki ground sesudah dipasang resistor pull down ke dua.
3.2.3 WiringAccelerometer Dengan ATMega 328
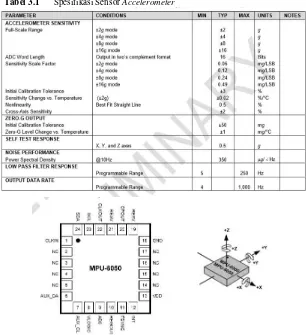
Pada Tugas Akhir ini menggunakan sensor accelerometer MPU 6050 yang merupakan produk dari Digital Devices yang mampu mengukur percepatan dalam 3 sumbu yaitu sumbu x, y dan z. Spesifikasi dari sensor ini ditunjukkan pada Tabel 3.1. Penggunaan accelerometer
31
Tabel 3.1 Spesifikasi Sensor Accelerometer
Gambar 3.16 Accelerometer Sebagai Tilt Sensor
Accelerometer berfungsi sebagai pendeteksi seseorang berpindah tempat dari posisi awal ke posisi selanjutnya. Perpindahan posisi tersebut merupakan salah satu indikator seseorang melangkah. Sebuah
Accelerometer memiliki spesifikasi dasar sebagai berikut: 1. I/O = Analog / digital
2. Jumlah sumbu
32
7. Temperature output dari sensitivitas 8. Range temperatur output
Spesefikasi Elektrik: 1. Tegangan input
2. Arus input
3. Tegangan bias
4. Waktu yang diperluakan untuk menyalakan Accelerometer
5. Pelindung
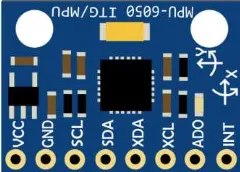
Berikut adalah letak pin pada Accelerometer yang disebutkan pada Gambar 3.17 dan wiringAccelerometer dengan ATMega 328 yang disebutkan pada Gambar 3.18.
33
Gambar 3.18 Wiring Accelerometer Dengan Minimum Sistem AT-Mega 328
i. Port Analog 4 ATMega 328 ke Pin SDA Accelerometer
ii. Port Analog 5 ATMega 328 ke Pin SCL Accelerometer
iii. Port 7 ATMega 328 ke Pin VCC Accelerometer
iv. Port 8 ATMega 328 ke Pin GND Accelerometer
v. Port 22 ATMega 328 ke Pin AD0 Accelerometer
vi. Port 3 ATMega 328 ke Pin INT Accelerometer
3.2.4 Baterai Li-Po
Rangkaian terminal baterai Li-Po (Lithium Polimer) digunakan untuk menyediakan tegangan DC yang berfungsi untuk seluruh kebutuhan sumber energi pada alat yang akan digunakan. Untuk alat yang dibuat, digunakan 1 buah baterai Li-Po dengan kapasitas 1000 maH dengan 2 buah cell. Setiap cell baterai Li-Po memiliki tegangan keluaran sebesar 3,2-3,7 Volt, sehingga apabila baterai memiliki 2 cell
34
Gambar 3.19 Struktur Baterai Li-Po
Gambar 3.20 Wiring Baterai Dengan Minimum System ATMega 328 Dan Regulator AMS 1117
35
Gambar 3.21 Rangkaian AMS 1117 5v Dan 3,3 v
3.3 Pembuatan Perangkat Lunak
Pembuatan perangkat lunak pada sistem ini terbagi menjadi beberapa bagian diantaranya adalah pembuatan flowchart, program
transmitter dan receiver, program Accelerometer, program pembacaan sensor FSR dan program Android.
3.3.1 Pembuatan Flowchart
Flowchart Program dari Sistem Wearable Pedometer Dengan
36
37
3.3.2 Program Transmitter Receiver
Pada Gambar 3.23 yang merupakan program inisialisasi awal dari program transmitter dan receiver. Dari Gambar 3.23 terdapat inisialisasi langkah dan langkah 2 sebagai program transmitter, digunakan tipe data
unsigned int karena untuk hasil pembacaan langkah membutuhkan nilai bilangan positif dan harus bisa lebih dari 10.000. Sedangkan inisialisasi
readString sebagai program receiver, digunakan fungsi String karena data yang akan diterima berupa teks.
Selanjutnya adalah program pada bagian void setup untuk
transmitter dan receiver. Berikut adalah Gambar 3.24 yang merupakan program pada void setup. Pada Gambar 3.24 terdapat perintah
Serial.begin untuk menentukan besarnya baudrate yang akan digunakan pada saat komunikasi serial, baudrate yang akan digunakan adalah 115200. Perintah pinMode digunakan untuk menentukan suatu pin
microcontroller akan digunakan sebagai input atau output. Pada program diatas pin13digunakan sebagai output.
Kemudian untuk program pada bagian void loop seperti pada Gambar 3.25 dan Gambar 3.26.
Gambar 3.23 Program Inisialisasi Awal
Gambar 3.24 Program Pada Void Setup
38
Gambar 3.25 merupakan program untuk menerima data secara serial
dimana saat terdapat data pada buffer penerima maka data tersebut akan dibaca dan dimasukkan pada variable c. Setelah itu variable readString
yang telah di deklarasikan pada awal program akan diisi data yang terdapat pada variable c secara terus menerus, sehingga microcontroller
akan melakukan proses pembacaan data secara terus menerus. Gambar 3.26 merupakan program untuk mengirim data secara serial. Perintah
Serial.println digunakan untuk mengirim data secara serial. Data yang dikrim adalah data pada variable langkah2 yang telah dideklarasikan pada awal program.
3.3.3 Program Sensor FSR
Untuk program sensor FRS (Force Sensitive Resistor) hanya berupa deklarasi yang ada pada program bagian void loop. Berikut ini adalah Gambar 3.27 yang merupakan program untuk sensor FSR.
Gambar 3.26 Program Transmitter Pada Bagian Void Loop
39
Pada Gambar 3.27 terdapat deklarasi fsr1 dan fsr0 dengan tipe data int
yang merupakan data numerik. Perintah analogRead digunakan untuk membaca data analog pada pin yang digunakan sebagain input sensor. Pin yang digunakan adalah pin A1 dan pin A0.
3.3.4 Program Accelerometer
Terdapat 3 bagian untuk program Accelerometer, yaitu bagian deklarasi awal, bagian kalibrasi, dan bagian untuk rumus Accelerometer
itu sendiri. Untuk progam deklarasi awal dapat dilihat pada Gambar 3.28. Pada Gambar 3.28 terdapat perintah #include yang digunakan untuk memanggil library suatu program. Library yang dipanggir adalah
Wire.h yang merupakan library untuk program komunikasi data I2C. Selanjtnya dilakukan deklarasi awal untuk variable yang akan digunakan dalam proses pembacaan data dari Accelerometer seperti pada Gambar 3.29.
Gambar 3.28 Program Deklarasi Awal Accelerometer
40
Pada Gambar 3.29 diatas merupakan program unntuk melakukan kalibrasi pada sensor Accelerometer yang menggunakan fungsi void
kalibrasi ( ). Fungsi ini nantinya akan dipanggil pada program utama yang ada di bagian void loop. Perintah for digunakan untuk melakukan perulangan, dengan adanya perulangan maka perintah selanjutnya akan terus diulang sampai nilai yang telah ditentukan. Perintah
Wire.beginTransmission ( ) digunakan untuk memulai proses transmisi data I2C, perintah Wire.send ( ) digunakan untuk mengirim data secara I2C, perintah Wire.EndTransmission digunakan untuk mengakhiri proses transmisi data. Untuk perintah Wire.requestFrom ( ) digunakan untuk melakukan proses permintaan total dari register yang akan digunakan dan perintah Wire.receive ( ) digunakan untuk menerima data yang terdapat pada register Accelerometer dan memasukkan data tersebut kedalam suatu variable.
Gambar 3.30 merupakan program dari rumus untuk mengolah
output yang telah dibaca dari acceleromer. Untuk perintah yang digunakan hampir sama seperti perintah yang ada pada program kalibrasi Accelerometer, hanya saja pada program ini terdapat rumus untuk perhitungan yang berbeda.
41
3.3.5 Program Android
Display yang akan menampilkan hasil perhitungan dari sistem ini adalah pada display Android. Tampilan atau fitur dari aplikasi sistem
wearable pedometer yaitu terdapat tombol on / off untuk koneksi
bluetooth, terdapaat display untuk jumlah langkah kaki, terdapat kolom untuk memasukkan batas langkah kaki yang didinginkan, terdapat tombol start untuk memulai proses penghitungan langkah, terdapat tombol reset untuk mengembalikan setting pada kondisi awal, dan terdapat indikator yang akan berubah jika jumlah langkah kaki telah memenuhi batas. Tampilan awal dari apliksi sistem wearable pedometer dapat dilihat pada Gambar 3.31.
Dari aplikasi Android pada Gambar 3.31 terdapat button on
untuk mengkoneksikan Smartphone dengan sistem Wearable pedometer sistem serta button off untuk memutuskan komunikasi antara
Smartphone dengan hardware. Adapun block diagram program yang dibuat adalah seperti pada Gambar 3.32.
Serta terdapat button Start untuk memulai penghitungan langkah kaki seseorang dengan mengirimkan perintah start pada minimum System ATMega 328 setelah Bluetooth Smartphone telah dikoneksikan dengan modul Bluetooth HC-05. Adapun block diagram program yang dibuat adalah seperti pada Gambar 3.33.
42
Gambar 3.32 Block Diagram Untuk Connect Dan Disconnect Bluetooth
Gambar 3.33 Block Diagram Untuk Memulai Penghitungan Langkah Kaki Setelah menekan button start maka sistem akan memproses
output dari sensor serta menampilkan hasil counter dari sistem tersebut, program yang berfungsi untuk memproses data tersebut dan menampilkan hasil counter block diagram program yang ditunjukkan pada Gambar 3.34. Dari diagram block pada Gambar 3.34 dapat diketahui bahwa data yang dikirim oleh minimum system ATMega 328 akan di convert pada type data number kemudian akan dikelompokkan pada setiap kemungkinan yang ada. Pengguna dari sistem wearable
43
pengguna sistem wearable pedometer. Program yang terakhir adalah
button reset yaitu berfungsi untuk mereset semua sistem ke kondisi awal dengan mengirimkan perintah reset pada Minimum System ATMega 328. Adapun block diagram program yang dibuat adalah seperti pada Gambar 3.35.
Gambar 3.34 Block Diagram Sistem Pedometer
44
45
4
BAB IV
HASIL PENGUJIAN SISTEMHASIL PENGUJIAN SISTEM
Bab ini dibagi menjadi tiga bagian. Pada bagian pertama dijelaskan mengenai hasil analisa dari setiap sensor yang digunakan pada alat pedometer serta hasil simulasi dari penghitungan sistem
Wearable pedometer. Pada bagian kedua akan membandingkan dengan hasil penghitungan pedometer lain. Dan bagian yang terakhir akan dijelaskan mengenai hasil implementasi sistem Wearable pedometer pada media yang akan digunakan yaitu sepatu sport. Pada implementasi, mekanisme penghitungan langkah kaki dengan penguji alat diharuskan jalan kaki biasa, jongkok, jalan ditempat serta jinjit. Untuk menguji ketahanan alat, dilakukan mekanisme jalan cepat dan lari, selain itu juga akan dilakukan uji katahanan sumber dari alat pedometer.
4.1 Hasil Analisa Dari Pengujian Setiap Komponen
4.1.1 Pengujian Sensor FSR
Pada sistem ini Sensor FSR berfungsi sebagai indikator bahwa seseorang sedang menapakkan telapak kaki atau tidak. Data diambil dari beberapa orang dengan berat badan yang berbeda sehingga didapatkan nilai ADC nya. Jika FSR dikenai berat suatu benda nilai resistansinya terus berkurang. Pengambilan data pada FSR menggunakan rangkaian pembagi tegangan, dalam pembacaan ADC 2 sensor FSR hasil data yang didapatkan hampir sama. Untuk pengujian sensor FSR dapat menggunakan rangkaian pada Gambar 4.1.
46
RM yang dipasang sebesar 10k ohm, Vout dari rangkaian tersebut akan disambungkan dengan pin analog pada minimum system
ATMega 328 yang telah diisi dengan program ADC. Pembacaan ADC dilakukan dengan menggunakan serial monitor. Hasil pengujian sensor FSR yang dilakukan dari beberapa orang dengan berat badan yang berbeda sehingga didapatkan nilai ADC nya dapat dilihat pada Tabel 4.1 dan didapatkan grafik pada Gambar 4.2.
Tabel 4.1 Hasil Pembacaan ADC Dengan Sensor FSR
47
Dari hasil pembacaan ADC dari sensor FSR dapat diketahui bahwa output dari sensor FSR adalah linier. Tujuan dari pengambilan data perbandingan ADC dengan berat badan seseorang adalah untuk mengetahui respon dari sensor FSR ketika digunakan pda sistem pedometer, sehingga ketika sensor FSR mendapat tekanan dengan berat dibawah 45kg maka data dari sensor tersebut tidak terhitung oleh sistem
4.1.2 Pengujian Sensor Accelerometer
Pembacaan data Accelerometer pada tiap sumbunya memiliki perbedaan, baik dalam posisi sensor maupun dari pergerakan sensornya. Pada Gambar 4.3 merupakan masing-masing sumbu dari Accelerometer:
Gambar 4.2 Grafik Hasil Pembacaan ADC Dari Sensor FSR
48 Depan
Z= (-16000) Y= (-16000) X= (-16000)
Pada pengujian posisi sudut dari modul Accelerometer
dilakukan dengan cara menghubungkan pin dari Accelerometer dengan
minimum system AT Mega328 sesuai dengan ketentuan dengan program untuk membaca output dari accelerometer melalui serial monitor. Jika output sudah dapat terbaca maka dilakukan pengujian menggunakan busur derajat. Sensor Accelerometer digerakkan sesuai dengan sudut yang diinginkan. Hasil pembacaan posisi sudut dari sensor
Accelerometer diketahui bahwa nilai batas dari output Accelerometer adalah -16000 sampai 16000 dapat dilihat pada Tabel 4.2. Hasil koordinat dari Accelerometer yang didapatkan dapat dilihat pada Gambar 4.4.
Dari pengujian Accelerometer yang diletakkan pada punggung kaki didapatkan perbedaan dari tiap pergerakannnya, dari pengujian tersebut didapatkan variable untuk posisi awal (X0, Y0, Z0) dan posisi akhir (Xt, Yt, Zt). Seseorang dikatakan melangkah dan berpindah posisi ketika X0 = Xt,Y0 ≠ Yt, dan Z0 = Zt atau X0 ≠ Xt,Y0 ≠ Yt, dan Z0 ≠ Zt sehingga sumbu yang digunakan dan diproses dalam penghitungan langkah kaki adalah sumbu X, Y, dan Z. Data yang ada pada Tabel 4.3 akan digunakan dalam program untuk menentukan apakah seseorang dikatakan berpindah tempat atau tidak.
Tabel 4.2 Data Yang Didapat Dari Accelerometer
Y= (16000)
Z= (16000)
Gambar 4.4 Posisi Pembacaan Sensor Dari Accelerometer
49
Tabel 4.3 Data Uji Coba Sensor Accelerometer Pada Punggung Kaki
Sumbu
Accelerometer Jinjit Mengayun Melangkah
Jalan Cepat
Sumbu X X0 = Xt X0 = Xt X0 = Xt X0 ≠ Xt Sumbu Y Y0 = Yt Y0 ≠ Yt Y0 ≠ Yt Y0 ≠ Yt Sumbu Z Z0 ≠ Zt Z0 ≠ Zt Z0 = Zt Z0 ≠ Zt
4.1.3 Pengujian Modul Bluetooth HC-05
Pengujian ini bertujuan untuk mengetahui jarak jangkauan yang mampu dicapai oleh modul Bluetooth HC-05 untuk melakukan komunikasi antara 2 perangkat, yaitu antara Minimum system AT-Mega 328 dengan Android. Pengujian jarak dilakukan dengan dua kondisi, yaitu komunikasi antar Bluetooth tanpa halangan dan dengan menggunakan halangan. Hasil pengukuran dapat pada Tabel 4.4 di bawah ini.
Pada Tabel 4.4 dapat disimpulkan bahwa jarak yang dapat dijangkau oleh Bluetooth tipe HC-05 tanpa menggunakan penghalang mampu mencapai jarak 25 meter. Dimana pada jarak 0 sampai 25 meter
Android masih dapat menerima data dengan baik, sedangkan jika jaraknya 25 sampai 35 perangkat masih terhubung namun koneksinya jelek (data yang diterima oleh Android tersendat dan tidak dapat berjalan dengan baik.). Dan jika jarak lebih dari dari 35 meter Android tidak dapat menerima data (koneksi terputus).
50
Tabel 4.4 Pengujian Jarak Bluetooth HC-05 Tanpa Halangan
Jarak (meter) Kondisi Status
5 Tanpa Halangan Terhubung
10 Tanpa Halangan Terhubung
15 Tanpa Halangan Terhubung
20 Tanpa Halangan Terhubung
25 Tanpa Halangan Terhubung
30 Tanpa Halangan Koneksi Jelek
35 Tanpa Halangan Koneksi Jelek
>35 Tanpa Halangan Tidak Terhubung
Tabel 4.5 Pengujian Jarak Bluetooth HC-05 Dengan Halangan Jarak (meter) Kondisi Status
1 Dengan Halangan Terhubung
6 Dengan Halangan Terhubung
10 Dengan Halangan Terhubung
51
4.2 Pengujian Dari Sistem Wearable Pedometer
Untuk mengetahui hasil perhitungan yang lebih akurat Implementasi dari sistem Wearable pedometer ini dilakukan melalui beberapa media, diantaranya dengan menggunakan Ankle Support pada Gambar 4.5, sepatu biasa pada Gambar 4.6 dan sepatu Sport pada Gambar 4.7.
Gambar 4.5 Uji Coba Sistem Pada Ankle Support
52
Dalam pengujian sistem melalui beberapa media dapat diketahui bahwa melalui media sepatu sport lebih akurat karena peletakkan dari sensor yang digunakan mempengaruhi dari nilai penghitungan langkah kaki seseorang saat melangkah. Selain lebih akurat dibandingkan dengan media yang lain, melalui media sepatu sport lebih efisien dan lebih efektif saat digunakan. Pada Tabel 4.6 merupakan data dari pembacaan pedometer Wearable.
Pengujian alat pedometer Wearable ini dilakukan pada beberapa orang, sehingga didapatkan data penghitungan langkah kaki yang cukup beragam. Keberagaman data tersebut dipengaruhi oleh model jalan kaki dari setiap orang yang berbeda, serta ukuran kaki seseorang juga berpengaruh terhadap kepekaan dari sensor FSR yang ada pada sepatu. Setelah didapatkan data seperti pada Tabel 4.6 dapat diketahui persentase Error dari setiap orang yang menggunakan pedometer
Wearable ini pada Tabel 4.7.
Gambar 4.7 Uji Coba Sistem Pada Sepatu Sport
Tabel 4.6 Hasil Data Dari Pembacaan Sistem Wearable Pedometer
No Nilai Referensi
Sistem Wearable Pedometer
53
Lanjutan Tabel 4.6 Hasil Data Dari Pembacaan Sistem Wearable Pedometer
No Nilai Referensi
Sistem Wearable Pedometer
Orang 1 Orang 2 Orang 3 Orang 4 Orang 5
Tabel 4.7 Hasil Presentase Error Dari Sistem Wearable Pedometer
No Referensi Nilai Error Sistem Wearable Pedometer (%)
4.3 Hasil Perbandingan Sistem Wearable Pedometer Dengan
Pedometer Lain