24
PENGARUH MAKANAN TAMBAHAN DALAM
MODEL MANGSA–PEMANGSA BEDDINGTON–
DEANGELIS
Ali Kusnanto
1), Hani Ammariah
2), Elis Khatizah
3) 1)2)3)Departemen Matematika, FMIPA, Institut Pertanian BogorKampus IPB Darmaga, Bogor
1)alikusnanto@yahoo.com 2)haniammariah25@gmail.com
3)elis_kh@gmail.com
Abstract— Penelitian ini mempelajari model mangsa-pemangsa Beddington-DeAngelis yang dikembangkan oleh Prasad et al. (2013) dengan mengasumsikan pemangsa tersedia makanan tambahan yang menyebar seragam dalam habitat. Dari model tersebut dianalisis pengaruh penyediaan makanan tambahan kepada pemangsa berdasarkan tingkat kuantitas makanan tambahan. Diperoleh lima buah titik tetap dengan analisis kestabilan dilakukan ketika pemangsa tersedia makanan tambahan dengan kuantitas yang tidak tetap. Pengaruh tingkat kuantitas makanan tambahan terhadap dinamika populasi ditunjukkan melalui simulasi numerik yang dilakukan pada tingkat kualitas makanan sama dan pada saat tingkat interferensi antar pemangsa rendah. Dalam penelitian ini ditunjukkan adanya Bifurkasi Hopf yang disertai dengan kemunculan limit cycle. Penyediaan makanan tambahan dengan kuantitas yang cukup besar kepada pemangsa pada tingkat interferensi antar pemangsa yang rendah dapat mengendalikan pemangsa agar mangsa mencapai titik kepunahan.
Keywords— Model Beddington–DeAngelis, makanan tambahan, interferensi antar pemangsa, Bifurkasi Hopf, limit cycle.
I.PENDAHULUAN
Salah satu masalah di bidang pertanian adalah pengendalian hama (contoh serangga) dan gulma tanaman. Profitabilitas hasil pertanian menjadi berkurang akibat hama yang merusak dan menghancurkan tanaman pada fase yang berbeda. Hal ini mendorong usaha manusia untuk membasmi spesies hama tersebut dengan menggunakan bahan kimia berbahaya yang disebut pestisida. Akan tetapi, bahan kimia yang terkandung di dalam pestisida ternyata banyak memiliki efek negatif bagi lingkungan maupun organisme lainnya. Oleh karena itu, program pengendalian hayati (biological control) mulai dipertimbangkan untuk menjadi solusi terbaik bagi pengendalikan hama yang bersifat non-polusi dan ramah lingkungan.
Pengendalian hayati adalah penggunaan parasitoid, predator, patogen, atau populasi pesaing untuk menekan populasi hama sehingga populasi hama dapat berkurang dan dapat
mengurangi kerusakan yang ditimbulkan oleh hama tersebut. Untuk menarik predator agar mau memakan serangga atau gulma tanaman, maka diberikanlah/diletakkan sumber makanan tambahan yang lokasinya dekat dengan hama/gulma. Sumber makanan tambahan ini dapat berupa nektar, serbuk sari, atau alternatif makanan lainnya yang sifatnya tidak bereproduksi dan tidak berinteraksi dengan mangsa (hama). Harwood dan Obrycki (2005) menunjukan bahwa penyediaan spesies non-hama kepada predator menyebabkan peningkatan populasi predator, yaitu dengan meningkatkan kesuburan mereka. Disisi lain, penambahan makanan tambahan dapat pula mengakibatkan tingkat konsumsi predator terhadap hama menurun. Dalam hal ini, pengelolaan kualitas dan kuantitas makanan tambahan memiliki peran penting dalam pengendalian sistem.
Dalam tulisan ini diteliti mengenai pengaruh penyediaan makanan tambahan untuk pemangsa khususnya pengaruh penambahan kuantitas makanan terhadap kestabilan sistem mangsa-pemangsa. Model yang digunakan adalah model mangsa-pemangsa Beddington-DeAngelis yang dikembangkan oleh Prasad et al. (2013) dengan
menambahkan adanya interferensi antar
pemangsa. Menurut Hoodle et al. (1997) dan
Reigadaa et al. (2012), adanya interferensi antar pemangsa ternyata memiliki dampak yang cukup besar bagi keberhasilan program pengendalian hayati.
II.TINJAUANPUSTAKADAN METODEPENELITIAN
Huu Du (2011) meneliti tentang dinamika model mangsa pemangsa Beddington-DeAngelis, khususnya menunjukkan syarat cukup agar terjadinya kestabilan global dan koeksistensi sistem. Pengaruh makanan tambahan pada sistem mangsa pemangsa juga diteliti oleh Ulfa dkk (2017) untuk model Leslie-Gower. Dalam penelitian ini ditunjukkan adanya empat titik tetap dan kondisi-kondisi kestabilannya.
25 dikembangkan oleh Prasad et al. (2013) yaitu dengan mengasumsikan bahwa pemangsa disediakan makanan tambahan yang menyebar seragam dalam habitat. Model yang digunakan adalah sebagai berikut: : tingkat pertumbuhan intrinsik mangsa (per waktu), : tingkat pertumbuhan maksimum pemangsa (per waktu),
:daya dukung lingkungan bagi mangsa (biomassa), : tingkat kematian pemangsa (per waktu), :tingkat predasi maksimum pemangsa (per waktu), :kekuatan saling interferensi antar pemangsa,
:koefisien normalisasi yang berkaitan dengan kepadatan mangsa dan pemangsa dengan lingkungan mereka berinteraksi (biomassa),
:kualitas makanan tambahan relatif terhadap
mangsa,(Makanan tambahan memiliki kualitas yang rendah jika rasio waktu penanganan antara makanan tambahan dengan mangsa lebih besar dari rasio antara tingkat pertumbuhan maksimum pemangsa dengan tingkat kematiannya),
:kemampuan efektif pemangsa untuk mendeteksi makanan tambahan relatif terhadap mangsa,
:kuantitas makanan tambahan yang disediakan untuk pemangsa (biomassa),
, , , , , , , , , dan diasumsikan bernilai positif.
Persamaan (1) menggambarkan laju pertumbuhan mangsa (hama). Laju pertumbuhan mangsa akan sebanding dengan jumlah kepadatan mangsa pada waktu yang sama. Selanjutnya, laju pertumbuhan ini berubah mengikuti model persamaan logistik karena adanya batasan ukuran dan kesuburan dari lingkungan tempat tinggal mangsa. Kemudian, laju pertumbuhan mangsa akan berkurang karena adanya interaksi dengan pemangsa, yaitu ketika mangsa diburu oleh pemangsa (predasi). Selain itu, adanya penyediaan makanan tambahan kepada pemangsa juga dapat mengurangi laju pertumbuhan mangsa.
Persamaan (2) menjelaskan laju pertumbuhan pemangsa. Laju pertumbuhan pemangsa akan bertambah karena adanya interaksi antara mangsa dengan pemangsa serta adanya penyediaan makanan tambahan kepada pemangsa. Kemudian, laju pertumbuhan ini akan berkurang karena adanya tingkat kematian pemangsa secara alami. Metode penelitian yang dilakukan adalah dengan mencari titik tetap dan melakukan analisis kestabilan di sekitar titik tetapnya. Untuk menyederhanakan pembahasan, dilakukan penondimensionalan pada model asli sehingga diperoleh model tanpa dimensi. Penondimensional model ini akan mengurangi banyaknya parameter yang terlibat, sehingga analisisnya menjadi lebih sederhana. Selanjutnya dilakukan pelinearan di sekitar titik tetap dan pencarian kestabilan
menggunakan analisis nilai eigen (Strogatz, 2015). Analisis dinamika model akan ditunjukkan dengan mengubah nilai parameter yang terlibat. Eksistensi munculnya orbit periodik dan bifurkasi hopf, akan diprlihatkan melalui simulasi menggunakan software Mathematica.
III. HASILDANPEMBAHASAN
Penondimensionalan
Dengan menggunakan skala parameter = , = , = ,persamaan (1)dan (2)menjadi
Parameter merepresentasikan tingkat pertumbuhan maksimum pemangsa, parameter merepresentasikan tingkat kematian pemangsa, parameter merepresentasikan tingkat interferensi antar pemangsa, parameter merepresentasikan daya dukung lingkungan (carrying capacity) mangsa, dan parameter merepresentasikan kuantitas makanan tambahan yang diberikan kepada pemangsa.
Penentuan Titik Tetap dan Kestabilannya
Titik tetap persamaan (3)adalah = (0,0),
= ( , 0), = 0,( ) , dan yang
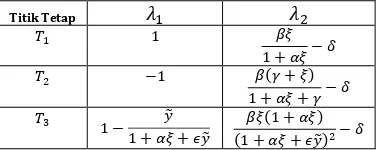
26 Dalam penelitian ini, difokuskan pada nilai yang merepresentasikan kuantitas makanan tambahan. Berdasarkan Tabel 1 di atas, kestabilan titik tetap bersifat sadel jika
− < 0, atau < . Sehingga kestabilan titik tetap adalah:
i) Jika < , maka kestabilan titik tetap bersifat sadel.
ii) Jika > , maka kestabilan titik tetap bersifat simpul tak stabil.
Dengan cara yang sama, titik tetap memiliki kestabilan :
i) Jika < ( ) , maka kestabilan titik tetap bersifat simpul stabil.
ii) Jika > ( ) , maka kestabilan titik tetap bersifat sadel.
Sedangkan titik tetap memiliki beberapa kemungkinan, yaitu: simpul tak stabil.
Selanjutnya, misalkan = ( ) , = , dan = ( ) . Selanjutnya akan dilihat kemungkinan posisi parameter terhadap besaran
, dan .Misalkan dipilih nilai parameter sehingga < < . Berdasarkan Tabel 1 dan penjelasan berikutnya, kestabilan titik tetap
, ,dan diperlihatkan dalam Tabel 2 berikut
TABEL 2KESTABILAN TITIK TETAP , ,DAN SAAT PEMANGSA DIBERIKAN MAKANAN TAMBAHAN
Kondisi Parameter Titik Tetap
1 < dilihat setelah melakukan simulasi.
Simulasi
Tanpa mengurangi keumuman nilai parameter, dalam simulasi ini nilai parameter yang bernilai tetap yaitu = 2.97, = 2.50,a= 1,Î=
0,01 dan = 10. Parameter yang nilainya berubah adalah parameter yang merepresentasikan kuantitas makanan tambahan yang diberikan kepada pemangsa. Nilai parameter yang dipilih dapat dilihat dalam Tabel 3 berikut.
TABEL 3PEMILIHAN NILAI PARAMETER
Kasus Tabel 2, kasus 4 menjelaskan kondisi 2 dan kasus 5 menjelakan kondisi 3.Pada saat pemilihan nilai parameter yang dinaikkan dari kasus 1, 2, menuju kasus 3 maka titik tetap yang berubah kestabilannya adalah titik tetap . Sedangkan dan selalu sadel. Titik tetap dan bernilai negatif dan bersifat tak stabil.
Titik tetap berubah dari spiral stabil menjadi spiral tak stabil, kemudian berubah lagi menjadi spiral stabil. Fenomena ini juga akan memunculkan limit cycle pada kasus 2. Fenomena inilah yang disebut Bifurkasi Hopf (Strogatz, 2015), yang dalam kasus ini terjadi 2 kali yaitu pada saat terjadi perubahan kestabilan spirat stabil menjadi spiral tak stabil dan perubahan spiral stabil menjadi spiral tak stabil.
Nilai-nilai ttik tetap dan kestabilan untuk ketiga kasus ini dapat dilihat dalam Tabel 4. Pada saat nilai cukup kecil ( = 1.35),titik tetap menjadi spiral stabil, seperti terlihat dalam Tabel 4 berikut. Jika nilai dipebesar nilainya ( = 3.50), akan berubah menjadi spiral tak stabil, seperti dalam Tabel 5. Selanjutnya jika nilai
= 5.12, berubah kembali menjadi spiral stabil seperti dalam Tabel 6.
TABEL 4TITIK TETAP, NILAI EIGEN, JENIS KESTABILAN = 1.35
Titik Tetap
0 10 0 4.17251 −153.772
0 0 −74.62 3.82327 −2965.53
1 −1 47.527 −0.0306013− 0.415306 −0.224195
27
TABEL 5TITIK TETAP, NILAI EIGEN, JENIS KESTABILAN = 3.50
Titik Tetap
0 10 0 2.09869 −153.848
0 0 −34.2 5.25535 −2926.54
1 −1 9.22511 0.0098455− 0.339126 −0.223007
−0.19 0.265172 0.205628 0.0098455+ 0.339126 29.3111 Jenis
Kestabi lan
Sad
el Sadel
Simpul Tak Stabil
Spiral Tak
Stabil Sadel
TABEL 6TITIK TETAP, NILAI EIGEN, JENIS KESTABILAN = 5.12
Titik Tetap
0 10 0 0.537437 −153.907
0 0 −3.744 6.35982 −2897.19
1 −1 1.61553 −0.000867673− 0.185155 i−0.222102
−0.01529410.2857570.0153883−0.000867673+ 0.185155 i29.4746 Jenis
Kestabil
an Sadel Sadel
Simpul Tak
Stabil Spiral Stabil Sadel
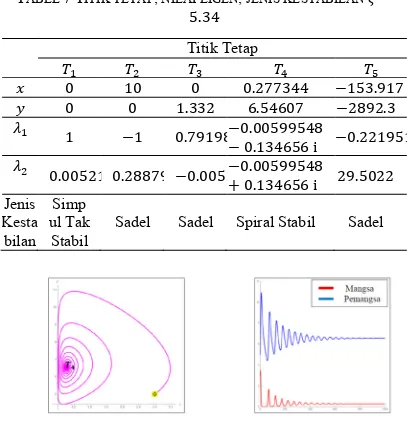
Dinamika populasi mangsa dan pemangsa pada ketiga kasus di atas, digambarkan oleh kurva bidang fase dan bidang solusi yang dapat dilihat pada Gambar 1 dan Gambar 2 di bawah ini.
Gambar 1 Bidang fase saat = 1.35 , = 3.50 , dan = 5.12)
Gambar 2 Bidang solusi saat = 1.35 , = 3.50, dan = 5.12
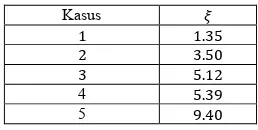
Dengan menaikkan kuantitas makanan tambahan untuk pemangsa, maka nilai (mangsa) pada titik tetap akan semakin mengecil mendekati nol. Dalam kondisi ini, eksistensi mangsa masih ada tetapi sedikit. Perhatikan Tabel 7 dan gambar 3 berikut yang menggambarkan kondisi mangsa dan pemangsanya.
TABEL 7TITIK TETAP, NILAI EIGEN, JENIS KESTABILAN = 5.34
Titik Tetap
0 10 0 0.277344 −153.917
0 0 1.332 6.54607 −2892.3
1 −1 0.791983−0.00599548− 0.134656 i −0.221951
0.005211270.288792−0.00520043−0.00599548+ 0.134656 i 29.5022 Jenis
Kesta bilan
Simp ul Tak
Stabil Sadel Sadel Spiral Stabil Sadel
Gambar 3 Bidang fase dan solusi saat = 5.34
Jika ingin membuat mangsanya punah, maka nilai dapat dinaikkan lagi menjadi cukup besar seperti ditunjukkan dalam Gambar 4 di bawah ini. Dalam kasus ini titik tetap dan bernilai negatif dan bersifat sadel. Kestabilan berada pada titik tetap , seperti ditunjukkan dalam Tabel 8 berikut.
TABEL 8TITIK TETAP, NILAI EIGEN, JENIS KESTABILAN = 9,4
Titik Tetap
0 10 0 −3.58149 −154.068
0 0 76.72 9.38806 −2819.75
1 −1 −5.87012 −0.781848−0.219674
0.1844230.324412−0.1717530.402351 29.924 Jenis
Kestab ilan
Simpu l Tak
Stabil Sadel
Simpul
Stabil Sadel Sadel
GAMBAR 4BIDANG FASE DAN SOLUSI SAAT = 9.4
Pada kondisi di atas, dengan nilai awal = 3 dan = 5, populasi pemangsa mengalami kenaikan hingga akhirnya stabil menuju titik
28 punah (dalam masalah nyata artinya hama akan punah).Artinya, pada kondisi ini program pengendalian hayati telah berhasil untuk mengontrol populasi hama (mangsa) melalui musuh alami (pemangsa) dengan pemangsa disediakan makanan tambahan pada kuantitas besar pada tingkat interferensi antar pemangsa yang rendah.
IV.SIMPULAN
Berdasarkan hasil analisis model mangsa dan pemangsa Beddington – DeAngelis dengan asumsi pemangsa disediakan makanan tambahan yang menyebar seragam di habitat, diperoleh lima buah titik tetap dengan jenis kestabilan yang berbeda untuk setiap kasus sesuai dengan kondisi yang diberikan. Pemilihan nilai parameter selaku parameter kontrol memiliki pengaruh yang cukup besar terhadap jenis kestabilan titik tetap pada model.
Ketika pemangsa diberi makanan tambahan dengan kuantitas yang semakin meningkat, terjadi perubahan kestabilan pada sistem, yaitu dari spiral stabil menuju spiral tak stabil dan dari spiral tak stabil menuju spiral stabil. Hal ini menunjukkan adanya Bifurkasi Hopf yang terjadi sebanyak dua kali disertai dengan kemunculan limit cycle.
Ketika semakin besar kuantitas makanan tambahan yang diberikan kepada pemangsa, menyebabkan sistem akan semakin cepat mengalami kestabilan menuju titik tetap ketiga yang mengakibatkan mangsa akan punah. Artinya populasi pemangsa telah berhasil mengontrol populasi mangsa sampai pada tingkat kepunahan. Dalam hal ini, keberhasilan program pengendalian hayati(biological control) dapat dicapai ketika pemangsa disediakan makanan tambahan dengan kuantitas yang cukup besar.
DAFTAR PUSTAKA
Harwood JD, Obrycki JJ. 2005. The Role of Alternative Prey in Sustaining Predator Populations. Di
dalam: Hoodle MS, editor. Proceedings of Second International Symposium on Biological Control of Arthropods. Volume 2. 2005 Sep 12-16. Switzerland (CH). hlm 453-462.
Hoddle M, Van Drieche R, Sanderson J. 1997. Biological Control of Bemisia argentifolii (Homoptera: Aleyrodidae) on Poinsettia with Inundative. Releases of Encarsia formosa (Hymenoptera: Aphelinidae): Are Higher Release Rates Necessarily Better?. Biological Control. 10:166-179.
Hu Du N, Thanh Trung T 2011.On The Dynamics of Predator-Prey Systems with Beddington-DeAngelis Functional Response. Asian-European J. Math:04,35
Reigadaa C, Araujob SBL, De Aguiar MAM. 2012. Patch Exploitation Strategies of Parasitoids: The Role of Sex Ratio and Foregers Interference in Stucturing Metapopulations.Ecological Modelling. 230:11-21.
Prasad BSRV, Banerjee M, Srinivasu PDN. 2013. Dynamics of Additional Food Provided Predator-Prey System with Mutually Interfering Predators. Mathematical Biosciences. 246:176-190.
Strogatz SH. 2015. Nonlinear Dynamics and Chaos, 2nd ed, with Application to Physics, Biology, Chemistry, and Engineering. Massachusetts (US): Addison-Wesley Publishing Company.