LAPORAN PRAKTEK SISTEM KONTROL
“PENGUJIAN KONTROL DENGAN P,I,D”
DISUSUN OLEH :
RIA ARIANTI (201303025)
2
FUNGSI ALIH MOTOR DC MAGNET
Startup execution:
loading initial environment
-->//fungsi alih motor dc magnet
-->J=0.05 J =
0.05
-->b=0.5 b =
0.5
-->R=5 R = 5.
-->L=0.25 L =
0.25
-->K=0.5 K =
0.5
-->num=K num =
0.5
-->s=%s s = s
-->denum=(J*s+b)*(L*s+R)+K^2 denum =
2
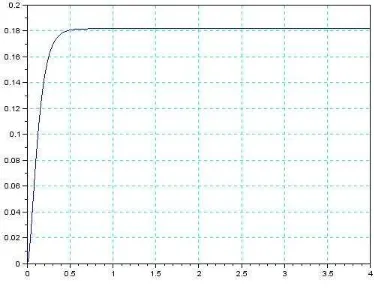
PENGUJIAN RESPON OPEN LOOP Startup execution:
loading initial environment
-->//fungsi alih motro dc magnet
WARNING: csim: Input argument 1 is assumed continuous time.
-->plot(t,res)
FUNGSI ALIH SENSOR KECEPATAN H(s)
Startup execution:
loading initial environment
-->//fungsi alih motor dc magnet
WARNING: csim: Input argument 1 is assumed continuous time.
6
WARNING: csim: Input argument 1 is assumed continuous time.
WARNING: csim: Input argument 1 is assumed continuous time.
WARNING: csim: Input argument 1 is assumed continuous time.
WARNING: csim: Input argument 1 is assumed continuous time.
-->xgrid()
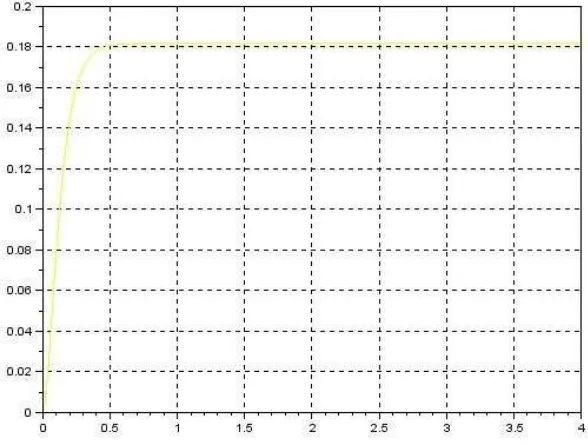
Grafik 2 : dengan H(s) = 0.5
8
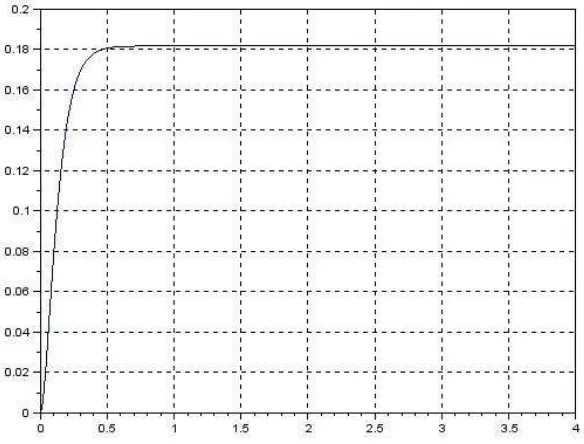
Grafik 4 : dengan H(s) = 1
10
FUNGSI ALIH SECARA KESELURUHAN DENGAN KONTROL P, PI, PD
Startup execution:
loading initial environment
-->//fungsi alih motor dc magnet
WARNING: csim: Input argument 1 is assumed continuous time.
-->plot(t,res)
-->H1=0.5
WARNING: csim: Input argument 1 is assumed continuous time.
WARNING: csim: Input argument 1 is assumed continuous time.
WARNING: csim: Input argument 1 is assumed continuous time.
WARNING: csim: Input argument 1 is assumed continuous time.
12
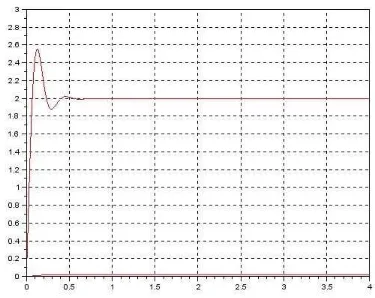
-->kp=300; ki=200; kd=10;
WARNING: csim: Input argument 1 is assumed continuous time.
res_pid =
-->res_pid1=csim('step',t,tf1);
WARNING: csim: Input argument 1 is assumed continuous time.
-->plot2d(t,res_pid1,style=5);
-->xgrid();
-->t=0:0.01:4;
WARNING: csim: Input argument 1 is assumed continuous time.
-->plot2d(t,res_pid1,style=5);
-->xgrid();
-->kp=200; ki=300; kd=10;
WARNING: csim: Input argument 1 is assumed continuous time.
14
-->plot2d(t,res_pid1,style=7);
-->xgrid();
-->kp=200; ki=300; kd=30;
WARNING: csim: Input argument 1 is assumed continuous time.
-->plot2d(t,res_pid1,style=7);
-->xgrid();
tf3 =
WARNING: csim: Input argument 1 is assumed continuous time.
-->kp=200; ki=20; kd=30;
WARNING: csim: Input argument 1 is assumed continuous time.
16
GRAFIK HASIL RESPON