Perancangan Modul Pembelajaran Sistem Kontrol dengan Menggunakan Matlab dan Simulink Jurnal publish
Teks penuh
Gambar
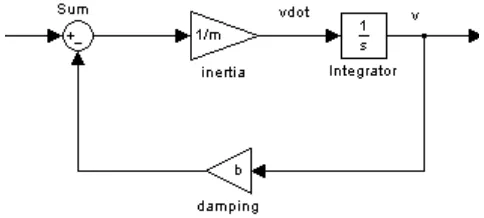
![Gambar 2.1 Diagram benda bebas kontrol peluncuran. [3]](https://thumb-ap.123doks.com/thumbv2/123dok/240310.402728/3.595.155.565.308.465/gambar-diagram-benda-bebas-kontrol-peluncuran.webp)
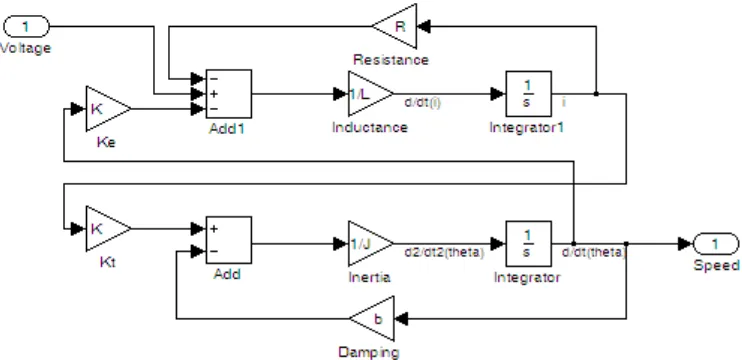
![Gambar 2.2 Diagram benda bebas motor DC. [3]](https://thumb-ap.123doks.com/thumbv2/123dok/240310.402728/4.595.173.489.132.340/gambar-diagram-benda-bebas-motor-dc.webp)
Dokumen terkait
: Unit ini berkaitan dengan pengetahuan, keterampilan, dan sikap yang diperlukan oleh karyawan industri pariwisata dan perjalanan yang berhubungan dengan wisatawan dan kolega
Penelitian ini bertujuan untuk mengetahui bagaimanakah hubungan antara efektifitas penggunaan media audio pembelajaran dengan pencapaian kompetensi dasar mata pelajaran al-Qur’an
Hasil penelitian terhadap proses pelaksanaan tradisi takbir keliling di desa Raji kecamatan Demak dalam perspektif dakwah Islam terdiri dari enam (6) tahap, yaitu: 1)
Yakni seberapa jauh tahap perilaku seks pranikah yang dilakukan oleh mahasiswa kost dikaitkan dengan masa perkembangannya, dimana situasi mereka lebih rentan untuk melakukan
S (2003) yang pernah menjabat sebagai Walikota Surabaya, yang dimaksud dengan pembangunan berkelanjutan bagi kota Surabaya adalah pembangunan yang mempertimbangkan
Karena intesitas pertemuan yang dilakukan tiap kali kegiatan arisan ( social gathering ) ini diadakan dapat mencairkan suasana yang awalnya berselisih dapat saling
terhadap peluang pasar Di Pasar Karang Sukun Kota Mataram yang merupakan salah satu studi gaya hidup konsumen untuk mengukur seberapa jauh pengaruh peluang pasar dan gaya
Untuk memasarkan x satuan ABC akan mempunyai biay total, C(x) ini biasanya beruapa jumlah dari biaya tetap ditambah biaya tidak tetap, yang secara langsung
