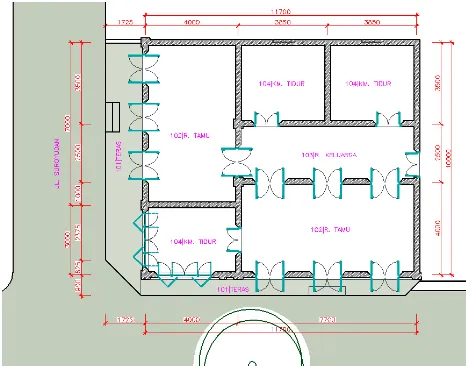
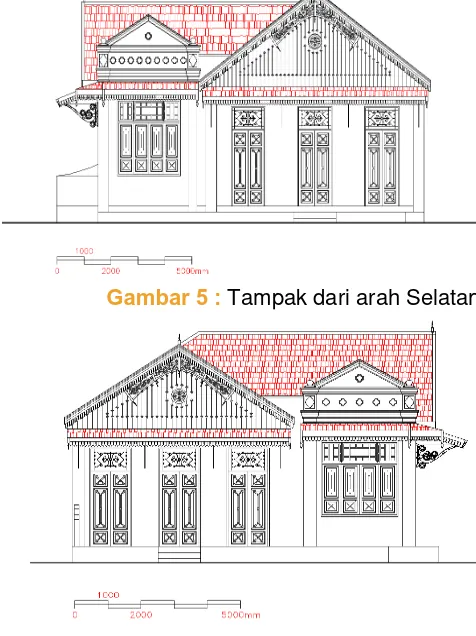
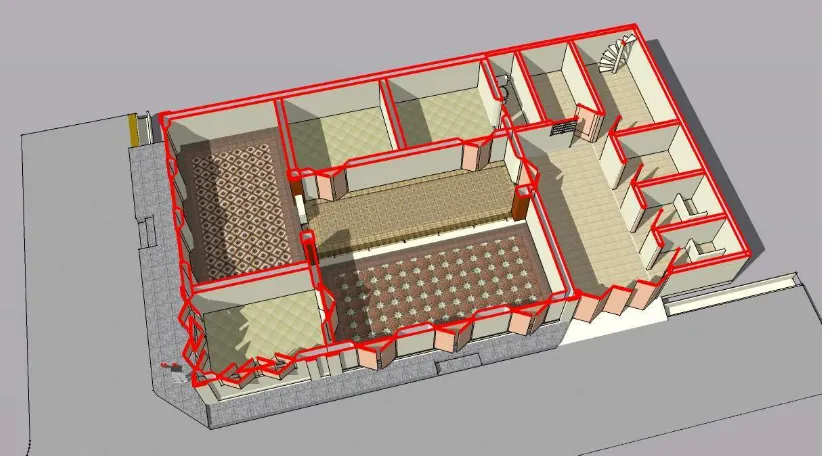
tesa unika juni 2009 PENGARUH ARSITEKTUR INDIS PADA RUMAH TINGGAL KAUMANsukawi
Teks penuh
Gambar


Dokumen terkait
Berdasarkan permasalahan diatas perlu dilakukan penelitian yang bersifat eksperimen dengan konseling Keluarga Berencana, khususnya konseling KB pada ibu hamil trimester
Peneliti mengambil kesimpulan: (1) materi ajar penghitungan volume yang dikembangkan telah memenuhi kriteria valid, praktis, dan efektif berdasarkan pendekatan PMRI
Fungsi Badan Kepegawaian Daerah Provinsi Riau dalam melakukan pengembangan Pegawai Negeri Sipil atau Aparatur Sipil Negara sudah berjalan dengan baik antara lain melalui
Abstrak — Tujuan khusus pelaksanaan program Pengabdian kepada Masyarakat ini adalah meningkatkan kompetensi guru Pendidikan Jasmani khususnya dalam bidang prestasi olahraga
Dalawang Misa lamang ang ipinagdiriwang sa araw na ito: Ang Misa na may Pagbabasabas ng mga Langis at Pagsariwa sa Pangako ng mga Pari na ginaganap sa umaga, at ang Misa
Tujuan penelitian ini untuk: (1) mendeskripsikan struktur yang membangun novel Menggapai Matahari karya Adnan Katino, (2) mendeskripsikan nilai-nilai
Data hanya melalui proses training kemudian data siap untuk diklasifikasikan dan untuk mendapatkan ketelitian digunakan data confusion matrix yang merupakan output
Program jalan robot yaitu program untuk mengirim data berupa array ke semua servo kecuali servo tangan secara bersamaan untuk menghasilkan suatu gerakan berjalan robot,
