Konferensi Nasional Engineering Perhotelan V, Universitas Udayana, 2014 395
Kajian Kinerja Traksi dan Perilaku Guling
Kendaraan Truk Pengolah Sampah
I Dewa Gede Ary Subagia, I Ketut Adi Atmika
*, Tjok, Gde Tirta Nindhia
Jurusan Teknik Mesin, Universitas Udayana Kampus Bukit Jimbaran, Bali 80362
Email: arsubmt@yahoo.com, tutadi@me.unud.ac.id
Abstrak
Dalam pengangkutan sampah, fenomena yang sering terjadi adalah tercecernya sampah di jalan. Selain dari itu armada yang bergerak menimbulkan kemacetan lalu lintas, dan menimbulkan polusi udara berupa bau yang kurang sedap pada lingkungan yang dilaluinya, baik langsung maupun tidak langsung berdampak juga pada kesehatan masyarakat. Disamping aturan–aturan baku standarisasi kendaraan pengangkut beberapa peneliti mengutarakan kendaraan bermotor selain memiliki kemampuan angkut yang pasti terhadap barang dan manusia juga harus memiliki kualitas dalam hal kemampuan/kinerja traksi, kinerja kestabilan dan keamanan. Penelitian ini menguji dan mengkaji kinerja traksi dan kinerja kestabilan kendaraan truk angkutan sampah yang terintegrasi dengan screw crusher yang dioperasikan pada berbagai kondisi/medan operasi. Untuk mengetahui karakteristik kinerja traksi kendaraan dimulai dengan menguji kemampuan daya-torsi engine kendaraan model. Sedangkan kinerja perilaku arah didapatkan dengan menterjemahkan model fisik kendaraan ke dalam model matematis yang diintegrasikan dengan plant kinerja kendaraan. Analisa perilaku kendaraan difokuskan pada analisa guling. Analisa kinerja traksi kendaraan model mampu mengatasi berbagai hambatan, dengan tanjakan yang mampu dilalui sampai dengan 49 derajat, dengan traksi yang dibutuhkan sampai dengan 2700 N dan prediksi daya engine minimum sebesar 120 hp. Pada kondisi jalan belok sampai kecepatan 60 km/jam, besarnya gaya normal pada masing-masing roda masih berharga positif, maka kendaraan masih aman untuk kondisi guling.
Kata kunci: screw crusher, kinerja traksi, perilaku arah, analisa guling.
Abstract
In transporting of garbage, a phenomenon that often occurs is spilled garbage on the street. Aside from cause traffic, congestion and air pollution pose a unpleasant odor to the environment, either directly or indirectly have an impact also on public health. This study examines and assesses the performance of traction and vehicle stability performance of trucking garbage crusher which is integrated with screw operated at various conditions / field operations. To determine the performance characteristics of the vehicle traction starting by testing the ability of the power-torque engine model vehicles. While behavioral performance direction is obtained by translating the physical model of the vehicle into a mathematical model that is integrated with design performance vehicles. The analysis is focused on analyzing the behavior of the vehicle rolling. Analysis of vehicle traction performance model is able to overcome various obstacles, with a capable pass climbs up to 49 degrees, with the traction needed up to 2700 N and the minimum prediction engine power of 120 hp. On the road conditions turn up the speed of 60 km / h, the magnitude of the normal force on each wheel is still positive, then the vehicle is still safe for the surrounding conditions.
.
Keywords: screw crusher, traction performance, behavioral directions, Rolling analysis
1. PENDAHULUAN 1.1. Latar Belakang
Sampah sering sekali mengganggu kenyamanan karena baunya yang tidak sedap dan pemandangan yang kurang baik. Semakin banyaknya sampah sekarang ini mengakibatkan pengolahannya menjadi tidak sempurna serta terkadang tidak terangkut oleh Dinas setempat karena terlalu banyak sampah dari industri-industri maupun rumah tangga. Masalah ini salah satunya dialami oleh ibu kota propinsi Bali yaitu kota Denpasar. Sampah yang dihasilkan kota Denpasar saat ini setiap harinya sebesar 2200 m3 sampai 2500 m3. Dinas yang bertanggung jawab atas kebersihan lingkungan kota Denpasar yaitu Dinas Kebersihan dan Pertamanan (DKP), saat ini DKP memiliki armada sejumlah 96 unit dengan tingkat kelayakan sebagai pengangkut sampah yang dapat dikatakan kurang memadai terutama dari sisi kenyamanan maupun kinerja traksi dan perilaku guling.
*
Penulis korespondensi, HP: 6281236785776, Email: tutadi@me.unud.ac.id
Prosiding KNEP V 2014 ISSN 2338-414X 396 Dalam pengangkutan sampah, fenomena yang sering terjadi adalah tercecernya sampah di jalan. Selain dari itu armada yang bergerak menimbulkan kemacetan lalu lintas, dan menimbulkan polusi udara berupa bau yang kurang sedap pada lingkungan yang dilaluinya, baik langsung maupun tidak langsung berdampak juga pada kesehatan masyarakat.
Pengangkutan menurut aturan pemerintah yang telah ditetapkan dalam Keputusan Menteri Perhubungan No. KM 69 Tahun 1993 tentang Penyelenggaraan Angkutan Barang di Jalan. Peraturan Pemerintah Nomor 41 Tahun 1993 tentang Angkutan Jalan (Lembaran Negara Tahun 1993 Nomor 59, Tambahan Lembaran Negara Nomor 3527).
Disamping aturan–aturan baku standarisasi kendaraan pengangkut beberapa peneliti mengutarakan kendaraan bermotor selain memiliki kemampuan angkut yang pasti terhadap barang dan manusia juga harus memiliki kualitas dalam hal kemampuan/kinerja traksi, kinerja kestabilan dan keamanan.
Tujuan penelitian ini adalah menguji dan mengkaji kinerja traksi, kinerja kestabilan dan keamanan model kendaraan angkut sampah. Sedangkan Tahap akhir dari keseluruhan aktifitas penelitian rancang bangun dan mekanisasi kendaraan angkut sampah integrasi mesin pencacah
(Screw Crusher) diharapkan menghasilkan sebuah konstruksi dan mekanisme kendaraan pengangkut
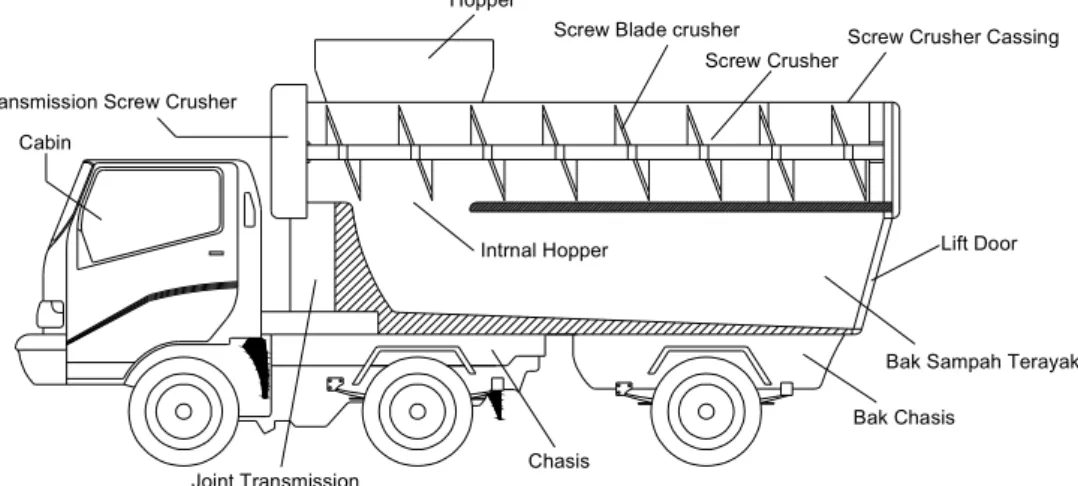
sampah yang memenuhi standar kelayakan operasi. Rancangan kendaraan truk angkut sampah terintegrasi dengan screw crusher ditunjukkan pada gambar 1.
Chasis
Screw Crusher Cassing
Cabin
Lift Door
Joint Transmission Transmission Screw Crusher
Intrnal Hopper
Bak Chasis Hopper
Screw Blade crusher Screw Crusher
Bak Sampah Terayak
Gambar 1. Rancangan prototipe kendaraan angkut sampah
1.1. Studi Pustaka
Beberapa peneliti mengutarakan kendaraan bermotor selain memiliki kemampuan angkut yang pasti terhadap barang dan manusia juga harus memiliki kualitas dalam hal kestabilan dan kenyamanan dan keamanan.
Cao Min [1] melalui penelitiannya yang berjudul “Advance Automotive Control system in the Future” mengembangkan suatu konsep pengendalian stabilitas arah kendaraan yang pada dasarnya masih berbasis pada pengendalian pengereman dan torsi.
Sutantra dkk [2] telah mengembangkan sistem kemudi 4 roda (4WS) yang dapat mempunyai multi parameter untuk meningkatkan stabilitas arah dan kemampuan belok kendaraan. Penelitian ini dilakukan melalui penelitian Hibah Bersaing VIII dengan judul Rancang Bangun Sistem Kemudi 4 Roda Multi Parameter untuk meningkatkan Stabilitas, dan kemampuan belok kendaraan.
Agus Sigit P.dkk [3] telah mengembangkan sistem pengendalian stabilitas arah kendaraan melalui pemberian atau pengurangan gaya pada rem roda dengan memanfaatkan ABS, dan pengendali torsi dengan memanfaatkan CVT dan terintegrasi pada sistem kemudi dengan penggerak 4 roda (4WS). Penelitian ini dilakukan melalui penelitian Hibah Penelitian TIM Pasca Sarjana – HPTP (Hibah Pasca), dengan judul “Rancang Bangun Smart Chasis Memanfaatkan Electronic Stability
Program (ESP) dengan Multi Control Parameter”
Adi Atmika [4] melakukan pengkajian karakteristik traksi dengan kontrol CVT untuk memperbaiki kinerja kestabilan kendaraan.
Zainul Asrori [5] melakukan kajian kelayakan operasi kendaraan Ledok, sebagai kendaraan salah satu alat teknologi tepat guna yang dipergunakan dalam kegiatan produksi pengolahan hasil – hasil pertanian di pedesaan. Penelitian ini dilakukan melalui Penelitian Dana DIPA 2005, dengan judul penelitian Studi Kelayakan Laik Jalan Kendaraan Ledok di Kabupaten Tulungagung”.
Konferensi Nasional Engineering Perhotelan V, Universitas Udayana
Dari hasil penelitian para peneliti pendahulu hanya memfokuskan pengembangan teknologi otomotif pada masalah keamanan, stabilitas, dan kenyamanan. Selanjutnya u
permasalahan tentang teknologi transportasi pengangkutan sampah akan dikembangkan prototipe kendaraan dengan bak penampung sampah yang terintegrasi dengan mesin pencacah (
crusher), yang diawali dengan pengujian dan pengkajian kine kendaraan.
1.2. Traksi Pada Kendaraan
Karakteristik traksi pada kendaraan bermotor pada pokoknya meliputi kemampuan kendaraan untuk dipercepat, dan mengatasi hambatan
rolling (rolling resistance), hambatan tanjakan, juga hambatan aerodinamis. Dari konsep gaya inertia, diturunkan persamaan traksi dan secara umum dituliskan :
dimana :
F= total gaya traksi yang dibutuhkan (N) Ra = hambatan aerodinamis (N)
Rr= Rolling resistance (N)
Rd = hambatan karena menarik beban (N)
Rg = hambatan tanjakan. (N)
W = berat total kendaraan (N) a = percepatan kendaraan (m/dt
1.3. Transmisi Pada Kendaraan Bermotor
Untuk pemakaian pada kendaraan bermotor, karakteristik daya guna ideal dari sumber tenaga penggeraknya adalah dihasilkan tenaga yang konstan pada semua tingkat kecepatan. Dengan tersedianya tenaga yang konstan tersebut, pada kecepatan yang rendah akan ters
cukup besar, akan dipergunakan untuk menghasilkan traksi yang cukup pada roda untuk mempercepat kendaraan. Dengan bertambahnya kecepatan, torsi mesin akan menurun secara hiperbolis. Hal ini sesuai dengan kebutuhan traksi pada kendaraan, dim
cukup tinggi, kebutuhan traksi tidak lagi besar. Grafik Karakteristik Daya umum untuk setiap kecepatan (rpm) ditunjukkan pada gambar
Gambar 2
Bila suatu sistem drive train dikarakteristikkan dengan parameter
drive train (ηt) dan perbandingan gigi reduksi (i), maka traksi pada roda penggerak dapat dirumuskan :
dimana :
Fk = gaya traksi pada tingkat ke
Me = torsi mesin untuk kecepatan v (Nm)
R = jari-jari roda penggerak (m) ik = ratio roda gigi ke
id = ratio roda gigi differensial
Konferensi Nasional Engineering Perhotelan V, Universitas Udayana
Dari hasil penelitian para peneliti pendahulu hanya memfokuskan pengembangan teknologi otomotif pada masalah keamanan, stabilitas, dan kenyamanan. Selanjutnya untuk dapat menjawab permasalahan tentang teknologi transportasi pengangkutan sampah akan dikembangkan prototipe kendaraan dengan bak penampung sampah yang terintegrasi dengan mesin pencacah (
), yang diawali dengan pengujian dan pengkajian kinerja traksi dan kinerja perilaku guling
Karakteristik traksi pada kendaraan bermotor pada pokoknya meliputi kemampuan kendaraan untuk dipercepat, dan mengatasi hambatan-hambatan yang terjadi, diantaranya hambatan ing (rolling resistance), hambatan tanjakan, juga hambatan aerodinamis. Dari konsep gaya inertia, diturunkan persamaan traksi dan secara umum dituliskan :
R
R
R
R
F
=
a+
r+
d+
gF= total gaya traksi yang dibutuhkan (N) = hambatan aerodinamis (N)
= Rolling resistance (N)
= hambatan karena menarik beban (N) = hambatan tanjakan. (N)
W = berat total kendaraan (N) a = percepatan kendaraan (m/dt2)
.3. Transmisi Pada Kendaraan Bermotor
Untuk pemakaian pada kendaraan bermotor, karakteristik daya guna ideal dari sumber tenaga penggeraknya adalah dihasilkan tenaga yang konstan pada semua tingkat kecepatan. Dengan tersedianya tenaga yang konstan tersebut, pada kecepatan yang rendah akan ters
cukup besar, akan dipergunakan untuk menghasilkan traksi yang cukup pada roda untuk mempercepat kendaraan. Dengan bertambahnya kecepatan, torsi mesin akan menurun secara hiperbolis. Hal ini sesuai dengan kebutuhan traksi pada kendaraan, dimana pada kecepatan yang cukup tinggi, kebutuhan traksi tidak lagi besar. Grafik Karakteristik Daya-Torsi Kendaraan secara umum untuk setiap kecepatan (rpm) ditunjukkan pada gambar 2.
2. Grafik Karakteristik Daya -Torsi kendaraan [6]
sistem drive train dikarakteristikkan dengan parameter-parameter efisiensi sistem ) dan perbandingan gigi reduksi (i), maka traksi pada roda penggerak dapat dirumuskan :
k e k
r
i
v
M
F
=
(
).
.
= gaya traksi pada tingkat ke- k ( N) = torsi mesin untuk kecepatan v (Nm)
jari roda penggerak (m) = ratio roda gigi ke-k.
= ratio roda gigi differensial
Konferensi Nasional Engineering Perhotelan V, Universitas Udayana, 2014 397 Dari hasil penelitian para peneliti pendahulu hanya memfokuskan pengembangan teknologi ntuk dapat menjawab permasalahan tentang teknologi transportasi pengangkutan sampah akan dikembangkan prototipe kendaraan dengan bak penampung sampah yang terintegrasi dengan mesin pencacah (screw
rja traksi dan kinerja perilaku guling
Karakteristik traksi pada kendaraan bermotor pada pokoknya meliputi kemampuan hambatan yang terjadi, diantaranya hambatan ing (rolling resistance), hambatan tanjakan, juga hambatan aerodinamis. Dari konsep gaya inertia,
a
g
W
g
+
.
(1)Untuk pemakaian pada kendaraan bermotor, karakteristik daya guna ideal dari sumber tenaga penggeraknya adalah dihasilkan tenaga yang konstan pada semua tingkat kecepatan. Dengan tersedianya tenaga yang konstan tersebut, pada kecepatan yang rendah akan tersedia torsi yang cukup besar, akan dipergunakan untuk menghasilkan traksi yang cukup pada roda untuk mempercepat kendaraan. Dengan bertambahnya kecepatan, torsi mesin akan menurun secara ana pada kecepatan yang Torsi Kendaraan secara
parameter efisiensi sistem ) dan perbandingan gigi reduksi (i), maka traksi pada roda penggerak dapat dirumuskan :
t d
i
η
.
(2)Prosiding KNEP V 2014 ISSN 2338-414X 398
2. METODE
Penelitian diawali dengan studi literatur mengenai penelitian-penelitian sebelumnya dan berbagai teori penunjang yang berkaitan dengan traksi kendaraan. Kemudian menentukan jenis kendaraan yang akan diuji, dilanjutkan dengan pengumpulan data-data kendaraan model yang diperlukan. Langkah awal yang dilakukan adalah menguji karakteristik daya-torsi engine kendaraan model. Kemudian dilakukan analisa terhadap kemampuan traksi yang mampu dihasilkan sistem transmisi kendaraan model pada berbagai kondisi/medan operasi, juga dilakukan analisa perilaku arah (analisa guling) kendaraan model.
3. HASIL DAN PEMBAHASAN 3.1. Kinerja Traksi
Karakteristik daya – torsi engine kendaraan model ditunjukkan pada gambar 7.
Gambar 3. Grafik Karakteristik Daya-Torsi Engine Model
Perhitungan dan Analisa Kinerja Traksi
Pada gigi I ( pada putaran mesin 1500 rpm) :
•••• Kecepatan kendaraan ( V ) d k
i
i
DN
S
V
.
)
1
(
06
,
0
−
π
=
428 , 6 . 981 , 4 1500 . 8 , 0 . 14 , 3 %). 3 1 ( 06 , 0 − = Vs
m
jam
km
V
=
6
,
85
/
=
1
,
90
/
•••• Traksi total ( F ) t d k er
i
i
V
M
F
=
(
).
.
.
η
9
,
0
.
4
,
0
248
,
6
.
981
,
4
.
08
,
377
=
F
N
F
=
27164
.
77
•••• Koefisien rolling resistance (fr )
5 , 2
100
+
=
f
f
V
f
r o s 5 , 2100
85
.
6
006
,
0
012
,
0
+
=
rf
Konferensi Nasional Engineering Perhotelan V, Universitas Udayana, 2014 399
f
r=
0
,
012
•••• Gaya angkat aerodinamis ( FL )
f a l L
C
V
A
F
.
.
.
.
2
1
ρ
2=
65
,
3
.
)
5
90
,
1
.(
225
,
1
.
15
,
0
.
2
1
−
2=
LF
N
F
L=
3
,
04
•••• Gaya hambat aerodinamis ( Ra )
f a d a
C
V
A
R
.
.
.
.
2
1
ρ
2=
65
,
3
.
)
5
90
,
1
.(
225
,
1
.
6
,
0
.
2
1
−
2=
aR
N
R
a=
12
,
17
•••• Rolling resistance (Rr )(
L)
r rf
W
F
R
=
.
−
(
36950
3
,
04
)
.
012
,
0
−
=
rR
64
,
443
=
rR
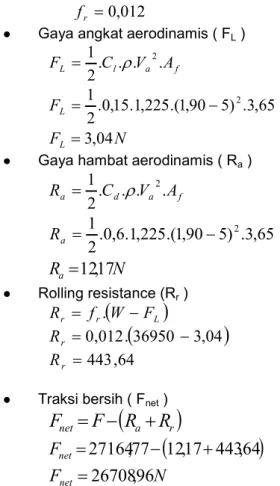
•••• Traksi bersih ( Fnet )
(
a r)
netF
R
R
F
=
−
+
(
12
,
17
443
,
64
)
77
,
27164
−
+
=
netF
N
F
net=
26708
,
96
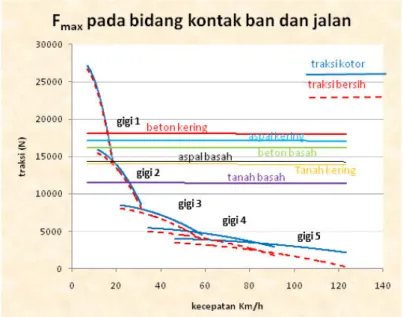
Hasil perhitungan kemudian ditunjukkan dengan grafik kecepatan vs gaya dorong (traksi) pada gambar 4, gambar 5, gambar 6, dan gambar 7.
Prosiding KNEP V 2014 ISSN 2338-414X 400 Gambar 5. Fmax untuk berbagai kondisi jalan
Gambar 6. Tanjakan yang mampu dilalui
Konferensi Nasional Engineering Perhotelan V, Universitas Udayana, 2014 401 Dari grafik kinerja traksi (gambar 8 s/d gambar 11), gambaran traksi yang dibutuhkan untuk mengatasi segala hambatan khususnya hambatan tanjakan mencapai 2700 N, kemudian dari karakteristik daya-torsi diperkirakan kebutuhan daya minimum kendaraan pengangkut sekitar 120 hp.
3.2. Perilaku Guling
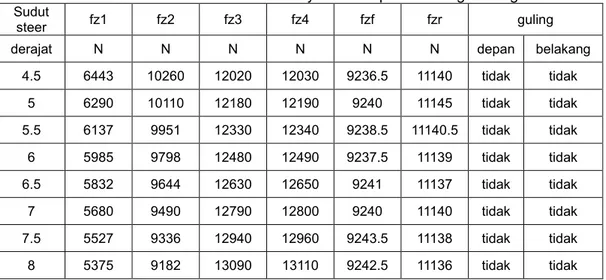
Pada operasi kendaraan berbelok, perilaku guling dilihat dari karakteristik gaya normal pada masing-masing roda. Salah satu contoh karakteristik gaya normal kendaraan truk model sampai kecepatan 60 km/jam ditunjukkan pada tabel 1.
Tabel 1. Hasil simulasi Karakteristik Gaya Normal pada masing-masing roda Sudut
steer fz1 fz2 fz3 fz4 fzf fzr guling
derajat N N N N N N depan belakang
4.5 6443 10260 12020 12030 9236.5 11140 tidak tidak 5 6290 10110 12180 12190 9240 11145 tidak tidak 5.5 6137 9951 12330 12340 9238.5 11140.5 tidak tidak 6 5985 9798 12480 12490 9237.5 11139 tidak tidak 6.5 5832 9644 12630 12650 9241 11137 tidak tidak 7 5680 9490 12790 12800 9240 11140 tidak tidak 7.5 5527 9336 12940 12960 9243.5 11138 tidak tidak 8 5375 9182 13090 13110 9242.5 11136 tidak tidak
Dari tabel 1, kondisi kendaraan model tidak mengalami guling dilihat dari besarnya gaya normal masing-masing roda yang masih berharga positif.
4. SIMPULAN
Dari hasil simulasi dan analisa yang dilakukan dapat ditarik beberapa kesimpulan sebagi berikut :
• Kinerja traksi kendaraan model pada kondisi penuh mampu mengatasi berbagai hambatan, dengan tanjakan yang mampu dilalui sampai dengan 49 derajat pada gigi I, dan pada gigi II tanjakan yang mampu dilalui sampai 27 derajat.
• Traksi yang dibutuhkan untuk mengatasi segala hambatan khususnya hambatan tanjakan mencapai 2700 N, kemudian dari karakteristik daya-torsi diperkirakan kebutuhan daya minimum kendaraan pengangkut sekitar 120 hp.
• Sampai kecepatan 60 km/jam pada kondisi jalan belok, besarnya gaya normal pada masing-masing roda masih berharga positif, maka kondisi kendaraan model masih aman untuk kondisi guling.
UCAPAN TERIMA KASIH
Penelitian ini terlaksana dengan biaya hibah desentralisasi DIKTI dengan kontrak no. 103.8/UN14.2/PNL.01.03.00/2014. Penulis menyampakan terima kasih yang sebesar besarnya kepada LPPM Universitas Udayana yang mengkoordinasikan kegiatan ini, sehingga penelitian berjalan dengan baik.
DAFTAR PUSTAKA
[1] Cao Min., Advance Automotive Control System in Future, Proceding, Int. Pacific Conference 11 (IPC-11), Nov. 6 – 9,2001,Shanghai,Cina
[2] I.N.Sutantra, Rancang Bangun Sistem Kemudi 4 Roda Multi Parameter untuk Meningkatkan Stabilitas, Kemampuan Parkir dan Belok Kendaraan, Laporan Hibah Bersaing VIII, Dirbin Litabmas-DIKTI, 1999-2000,Jakarta
[3] Agus Sigit Pramono, Devi Chandra, Pandri Pandiatmi, “Smart System Four Whell Steering (4 WS) Berdasarkan Kendali Yaw Rate”, Jurnal Poros, Jakarta 2007.
[4] Adi Atmika.,“Desain dan Karakteristik Sistem Kontrol Torsi dengan CVT Untuk Memperbaiki Stabilitas Arah Kendaraan”, Jurnal Majalah IPTEK, ISSN.0853-4098, Vol 15. No.3, Surabaya,
Prosiding KNEP V 2014 ISSN 2338-414X 402 Nopember 2004.
[5] Ary Subagia, Wayan Berata, Pemodelan Simulasi Berbasis Fuzzy Controller terhadap Perilaku Yaw Rate dengan Pengendalian sudut Steer Roda Belakang, Jurnal Teknik Mesin Univ. Kristen Petra, ISSN 1410-9867, Vol.6 no.2 Oktober 2004 Surabaya.
[6] Sutantra, Teknologi Otomotif – Teori dan Aplikasinya, Guna Widya, 2001, Surabaya.
[7] Ary Subagia.IDG, Agus Sigit P, Requirement for Corner Angle Variation of Rear Wheel on Four Wheel Steering System with Controlled Eunuch Slip, Jurnal Majalah IPTEK, ISSN.0853-4098, Vol 16. No.1, Februari 2005. Surabaya
[8] Agus Sigit P, I.N Sutantra, Iwan Fauzan., “Design and Perfomance Characteristic of Gearless Variable Transmission Applied for Automobile”, Proceding, FISITA World Automotive Congress, June 12 – 15, 2000, Seoul, Korea.
[9] Akira Higuchi, Yasushi Saito, Toyota Motor Corporation, Optimal Control of Four Wheel Steering Vehicle, Proceeding of AVEC 92, Japan, (1992 9), Nr. 923043.
[10] I.N.Sutantra, Yusuf Kaelani, Dinamic Characteristics of Multi Function Four Wheel Steering
System, FISITA World Automotive Congress, June, 2000, Seoul, Korea, F2000G344.
[11] J.Y. Wong, Theory of Ground Vehicles, John Wiley & Son, New York, 1978
[12] Motoki S, Yu Qing W, M Nagai, Motion Control of Electrical Vehicle Considering Vehicle Stability, August 22 – 24, AVEC-2000, Ann Arbor, Michigan
[13] M. Abe, Y.Kano, K.Suzuki, An Experimental Validation of Side Slip Control to Compensate Vehicle Lateral Dynamic for A Loss of stability Due To Nonlinier Tire Characteristics, Proc. 5th Int’l Syposium on Advanced Vehicle Control (AVEC-2000), August 22 – 24, 2000, Ann Arbor, Michigan.
[14] Sinsuke sato, et all, “Integrated Chasiss Control System for Improved Vehicle Dynamic, Toyota Motor Corp, 1992.
[15] W. Diyono, Sutantra, Rancang Bangun Sistem Kemudi 4 Roda Electric – Mekanis
(M-ITS-4WS-II), Laporan Proyek Penelitian , Jurusan Teknik Mesin ITS, 1994, Surabaya.
[16] Witono Hardi, Agus Sigit Pramono, “Analisa Collision pada Chassis Kendaraan Kota M-ITS
4WS dengan Mengacu Standar MVSS”, Prosiding Seminar Nasional Teknik Mesin Univ. Petra,