1
T.C.
EGE ÜNĠVERSĠTESĠ
MÜHENDĠSLĠK FAKÜLTESĠ
MAKĠNA MÜHENDĠSLĠĞĠ
BÖLÜMÜ
MAKİNA PROJESİ I
SANTRĠFÜJ POMPA TASARIMI
Öğrencilerin Adı ve Soyadı:
Mehmet Murat YARDIMCI
Ali ABUL
Elvan DOĞAN
Projeyi Yöneten:
Prof. Dr. Aydoğan ÖZDAMAR
MAYIS, 2010 ĠZMĠR
2 AĢağıda belirtilen bu çalıĢma, ... / ... / .... günü toplanan jürimiz tarafından, MAKĠNA PROJESĠ I olarak kabul edilmiĢtir / edilmemiĢtir.
ÇalıĢmanın Adı : Tam Santrifüj Pompa Tasarımı
Öğrenci Adı, Soyadı :
Mehmet Murat YARDIMCI-5060008178
Ali ABUL-5060008177
Elvan DOĞAN-5060008275
DanıĢmanın Ünvanı, Adı, Soyadı : Prof. Dr. Aydoğan Özdamar BaĢarı Notu (rakam ve yazı ile) :
BaĢkan Üye Üye
Prof. Dr. Aydoğan ÖZDAMAR Prof.Dr.Necdet ÖZBALTA Yar. Doç. Hüseyin GÜNERHAN
3
TEġEKKÜR
Bu çalıĢmanın baĢlangıcından bitimine kadar her aĢamada, çalıĢmamızı yönlendiren, özverili yardımlarını esirgemeyen hocamız Prof. Dr. Aydoğan ÖZDAMAR projemizin biçimlenmesinde değerli katkılarından dolayı teĢekkürü bir borç biliriz.
Mehmet Murat YARDIMCI Elvan DOĞAN Ali ABUL
4
ÖZET
Bu çalıĢmanın ilk bölümde mühendislik uygulamalarında sıkça karĢılaĢılan Tam Santrifüj Pompa ve Pompa elemanları hakkında genel bilgiler verilmiĢtir. Ġkinci bölümde ise debisi, devri ve basma yüksekliği verilen bir pompanın ilgili hesaplamaları ve boyutlandırılması tüm hesaplamalar, üçüncü bölümde pompa organının seçimi, dördüncü bölümde pompa çark çizimi için hesaplamalar ve son bölümde ise detay resimleri (salyangoz, meridyen kesiti, çark, kanat profili, mil) paket program ile çizilmiĢtir.
5
ĠÇĠNDEKĠLER
ĠÇĠNDEKĠLER ... 5 1. POMPA ... 7 1.1 Pompa türleri ... 8 1.2 Santrifüjlü Pompalar ... 14 2. TEMEL KAVRAMLAR ... 16 2.1 Bernoulli Denklemi ... 16 2.2 Potansiyel AkıĢ ... 16 2.3 Manometrik Yükseklik ... 17 2.4 Karekteristik Eğriler... 18 2.5 Pompanın Çektiği Güç ... 19 2.6 Özgül Hız ... 19 2.7 Kavitasyon ... 192.7.1 Santrifüjlü Pompada Kavitasyon ... 19
2.8 Net Pozitif Emme Yükü ... 20
3. SANTRĠFÜJLÜ POMPA KISIMLARI ... 21
3.1 Çark ... 21 3.2 Salyangoz ... 22 3.3 Yatak ... 23 3.4 FlanĢ ... 24 3.5 Difüzör ... 26 3.6 Salmastra Kutusu ... 27 3.7 Salmastra ... 27 3.8 Mil ... 28 3.9 Emme Borusu ... 29
3.10 DiĢ Klapesi ve Süzgeç ... 30
3.11 Rulman ... 31
3.12 Glen ... 32
3.13 Glen Saplamaları... 33
4. DEBĠSĠ, DEVRĠ VE BASMA YÜKSEKLĠĞĠ VERĠLEN BĠR POMPANIN ĠLGĠLĠ HESAPLAMALARI VE BOYUTLANDIRILMASI ... 35
6 4.2 Mil Çapı ... 35 4.3 Verimler ... 36 4.3.1 Pompa Verimi ... 36 4.3.2 Hidrolik Verimi ... 36 4.3.3 Mekanik Verimi ... 36 4.3.4 Volumetrik Verimi ... 36
5. POMPA ORGANININ SEÇĠMĠ 5.1 Pompa Organının GiriĢ KoĢulları ve Hesabı ... 36
5.2 PompaOrganının ÇıkıĢ KoĢulları ve Hesabı ... 41
6. POMPA ÇARK ÇĠZĠMĠ ĠÇĠN HESAPLAMALAR ... 44
6.1 Meridyen Kesitinin Çizimi ... 44
6.2 Nokta Nokta Metodu Ġle Kanat Çizimi Ġle Ġlgili Hesaplamalar ... 46
6.2.1 Minimum kanat yüzeyinin saptanması ve(zL)min kontrolü ... 48
6.3 Salyangoz Hesabı ve Çizimi... 50
7.SANTRĠFÜJ POMPALARIN ĠġLETMEYE ALINMASI ... 52
8.SANTRĠFÜJ POMPALARIN BAKIMININ YAPILMASI ... 55
9.SANTRĠFÜJLÜ POMPA ARIZA BELĠRTĠLMESĠ VE MUHTEMEL SEBEPLER . 58 10.MALĠYET HESABLARI... 59
10.1 Salmastra Seçimi... 59
10.2 Mil ... 60
10.3 Çark ... 60
7
1.POMPA
Pompa içine çektiği akıĢkana kinetik ya da potansiyel enerji kazandırmaya yarayan aygıttır. Pompa genellikle akıĢkanları bir yerden bir yere iletmeye daha yükseğe çıkarmaya gazları sıkıĢtırıp kapalı kapıların içindeki gazları boĢaltmaya yarar. [1]
Bir baĢka deyiĢle, Pompalar sıvıların enerjisini ya da basıncını arttıran makinelerdir. Bu bakımdan bir sıvının alçak seviyeden yüksek seviyeye (ġekil-1) veya düĢük basınçtan yüksek basınca (ġekil-2) gönderilmesi için kullanılırlar. Diğer taraftan pompalar bir boru içinde akan sıvının akıĢ hızını ve dolayısıyla debisini arttırmak için de kullanılır. [2]
ġekil-1 ġekil-2
Ġlk pompa M.Ö. 3. yüzyılda ArĢimet tarafından tasarlanmıĢtır. Pompalar mekanik kuvvetlerin fiziksel kaldırma veya sıkıĢtırma kuvveti ile maddeyi itmesi prensibini kullanarak çalıĢır (ġekil-3). [3]
ġekil-3
1.1.POMPA TÜRLERĠ
8 A)DĠġLĠ POMPALAR
1-DıĢtan DiĢli 2-Ġçten DiĢli
3-Ġçten Eksantrik DiĢli B)PALETLĠ POMPALAR C)PĠSTONLU POMPALAR 1- Eksenel Pistonlu a) Eğik Gövdeli b) Eğik Plakalı 2- Radyal Pistonlu 3- Pistonlu El Ponpaları [4]
Pompaları genel olarak iki grupta toplamak mümkündür.
Pozitif yer değiĢtirmeli pompalar (Hacimsel): Bu pompalarda pompa içindeki akıĢkan hacmi değiĢmekte, çalıĢma sadece mekanik ve statik kurallara bağlı kalmaktadır.Hacimsel pompalar Ģu Ģekilde sınıflanır:
Pistonlu pompalar: Pistonlu pompalar Diyaframlı pompalar Rotatif pompalar:
Tek rotorlu pompalar: Kayar paletli pompalar, esnek borulu pompalar, vidalı pompalar, peristaltik pompalar
Çok Rotorlu Pompalar: DiĢli pompalar, loblu pompalar, vidalı pompalar, çevresel pistonlu pompalar
Rotodinamik pompalar: Bu pompalarda ise akıĢkanın içinde çalıĢan bir çark bulunur.Kapalı hacim söz konusu değildir.Rotodinamik pompalar da Ģu Ģekilde sınıflandırılır:
Santrifüj veya radyal akıĢlı pompalar Eksenel akıĢlı pompalar
Karisik akıĢlı pompalar
Bunların içinde maliyeti en düĢük olan pompa tipi de santrifüj tipi pompalardır.
Bunlardan ayrı olarak bir de özel dizaynlı pompalar vardır ki bunlara örnek olarak da, jet veya ejektörlü pompalar, elektromagnetik pompalar ve sıvı kumandalı pompalar verilebilir. [3]
A)DĠġLĠ POMPALAR: Biri çeviren diğeride çevrilen oLmak üzere iki diĢliden ·
meydana gelmiĢtir. Çeviren diĢli motordan aldığı dönme hareKetini çevrilen diĢliye iletir. Böylece diĢliler diĢ boĢluklarına aLdıkları akıĢkanı sisteme gönderir.
Bu tip pompaların debisi sabittir. Pompa debisini aıitırabilmek için diĢ boĢluklaı·ı büyütülmelidir. Dönü Ģ hareketi sonucu emiĢ tarafında vakum oluĢarak, emme iĢlemi gerçekleĢir.
9 kadar basınç gerektiren sistemlerde kullanılır. GiriĢ borusu çapı , çıkıĢ borusuna göre daha büyüktür.
Artan hacim ve azalan hacim prensibine göre çalıĢır. DiĢli ile gövde arasında çalıĢma boĢluğu vardır. Zamanla bu boĢluk, aĢınmalar sonucu artar. BoĢluğun artması pompa verimini düĢürür. Verimi çok düĢen pompa hurdaya ayrılır.
ġekil.4
2)Ġçten diĢli pompalar: Ġç içe çalıĢan iki diĢliden ibarettir. Ġçteki diĢli (rotor diĢlisi) - motordan aldığı dönme hareketini dıĢtaki diĢliye (aynadiĢlisı) iletir Ġki diĢlinin eksenleri kaçıktır. Ġçteki diĢliııin diĢ sayısı bir diĢ eksiktir. Bu sayede emme ve basma boĢlukları oluĢur. DiĢliler dönmeye baĢladığında bir tarafta artan hacim, diğer tarafta azalan hacim oluĢur. Artan hacimde emme, azalan hacimde basma iĢlemi gerçekleĢir.
ġekil.5
10 dönme hareketini dıĢtaki diĢliye (ayna diĢlisi) verir. DıĢtaki diĢli aldığı bu dönme hareketini,
içteki diĢliye (rotar diĢlisi) iletir. DiĢliler arasında hilal Ģeklinde bir ayırma parçası vardır. Bu
parça pompanın daha verimli çalıĢmasını sağlar Bu tip pompalar daha sessiz çalıĢtıkları ve yüksek debili oldukları için gün geçtikçe daha yaygın olarak kullanılmaktadır.
ġekil.6 B)PALETLĠ POMPALAR:
Çevresine belirli sayıda palet yerleĢtirilmiĢ bir rotorun, eksenden kaçık olan bir
gövde içinde dönmesi ile çalıĢır.Gövde ve rotor arasındaki eksantriklik miktarı arttıkça debi
de artar. Palet sayısı 3-10 arasında olabilir. Paletler rotor üzerine yerleĢtirildikleri kanallar içinde radyal olarak (eksene dik) hareket edebilirler. Böylece emme iĢlemi esnasında dıĢarıya çıkıp , basma iĢlemi esnasında içeriye girerler.
ġekil.7 C)PĠSTONLU POMPALAR
11 Bir silindir içinde ileri-geri hareket eden pıstonların emdikleri akıĢkanı sisteme
basmaları prensibine göre çalıĢır. Sızdırmazlıkları yüksek olduğu için diğer pompalara göre
daha verimlidir. Boyutları diğer pompa türlerine nazaran daha büyüktür. Yüksek çalıĢma basıncı gerektiren sistem lerde kullanılır. Yapıları karmaĢık olduğundan fıyatları
pahalıdır.
Eksenel ve radyal olmak üzere iki çeĢittir:
1) Eksenel pistonlu pompalar: Bu tip pompalarda pistonlar tahrik mili eksenine paralel Ģekilde yerleĢtirilmiĢtir. Ġki değiĢik sistemle çalıĢır.
l-a)Eğik plakalı eksenel pistonlu pompa: Eğik bir plaka üzerine bağlı pistonlardan oluĢur. Eğik plakanın dönmesi sonucu pistonlar ileri-geri hareket eder. Pistonların bu hareketi ile emme-basma iĢlemi gerçekleĢir. Plakanın açısı değiĢtirilince piston kursları değiĢir. Böylece debi miktarı ayarlanır.
ġekil.8
l-b)Eğik gövdeli eksen el pistonlu pompa: Bu tip pompaların gövdelerine açı
verilmiĢtir. Gövdeye verilen açı ile debi doğru orantılıdır. Gövdenin açısı değiĢtirildiğinde pistonların kursu değiĢir. Böylece istenilen debi miktarı ayarlanır.
ġekil.9
12 eksenine dik olarak yerleĢtirilmiĢtir. Rotorun dönmesiyle, pistonlar silindir bloğu içinde ileri-geri hareket ederler. Böylece emme-basma olayı gerçekleĢir.
Eksantriklik oranı değiĢtirildiğinde piston kursu da değiĢeceğinden debi miktarı ayarlanabilir.
ġekil.10
3)Pistonlu el pompaları : Bu tip pompalarda pistonun ileri-geri hareketi el ile
sağlanır. Hidrolik kriko, hidrolik el presi v.b. mekanizmalara gerekli olan basınçlı akıĢkanı sağlamada kullanılır. Yapıları çok basittir. Yüksek basınç istenen yerlerde kullanılmaz.
ġekil.11 [4]
13 ġekil- a'da görülen piston lu el pompasının pompa kolu aĢağı hareket ettirildiğinde,
pistonun alt kısmındaki akıĢkan , sol taraftaki çek valfi kapatıp, sağ taraftaki çek valfi açacaktır. Bu esnada tahliye valfi kapalı olduğu için hidrolik akıĢkan sisteme giderek gerekli
iĢi yaptırır. Pompa kolu yukarı kaldırılırken oluĢan vakum sonucu, sağ taraftaki çek valf kapanıp sol taraftaki çek valf açılacaktır. Depodan emilen akıĢkan pompa pistonu altındaki hazneye dolar.
Sistemde akıĢkaıı'ın iĢi bittiğinde tahliye valfi açılarak, akıĢkanın tekrar depoya dönmesi sağlanır.
ġekil-17b'deki çift etkili pistonlu el pompasında ise, piston sağa doğru hareket
ederken, oluĢan vakum sonucu sol taraftan akıĢkan em ilerek silindir içine dolar. Pistonun sağ
tarafında ise, daha önce emiImiĢ olan akıĢkan sisteme gönderilir. Pistonıın sola hareketindç ise sağ taraftan akıĢkan emilir, diğer tarafta daha önce em ilm iĢ akıĢkan sisteme gönderil ir.
Bu tip pompalarda iki yönde iĢ yapıldığı için çift etkili olarak ad i adlandırılır [4]. Pompa Seçiminde Dikkat Edilecek Hususlar:
1
.Gerekli debi miktarı2.
ÇalıĢma basıncı3.
Pompanın fiyatı4.
Pompanın bakım ve onarım kolaylığı5.
Pompanın dönüĢ hızı6.
Pompa verimi7.
Pompa boyutları8.
Pompanın sessiz ve tireĢimsizçalıĢması9.
Pompanın dönüĢ yönü10.
Pompanın montaj kolaylığı11
.Yedek parça bulma kolaylığı14 Bilindiği gibi pompa sıvıya enerji veren veya enerjisini arttıran bir makinedir. Santrifüj pompa ise merkez kaç kuvvetinden yararlanarak sıvının enerjisini arttırmayı sağlar (ġekil-4).
ġekil-12
Dairesel olarak hareket eden sıvı merkezden dıĢarı doğru bir kuvvetle itilir. Bu kuvvet merkezkaç ya da santrifüj kuvvetidir. Santrifüj pompaların çalıĢması bu prensibe dayanır. Sıvı önce bir merkeze gelir. Sonra dönme hareketi ile merkezden dıĢarı itilir. Pompanın çıkıĢ basıncı emme basıncından fazladır. Aynı Ģekilde pompayı terk eden sıvının enerjisi de girenden fazladır. Sıvıya dönme hareketini veren pompa aksamına „fan‟ (impeller) adı verilir.
Sıvı emme ağzından fan merkezine girer. Fan sıvıya dönme hareketi verir. Dönme hareketinin meydana getirdiği merkezkaç kuvvet etkisiyle sıvı dıĢarı doğru savrulur. Fan ne kadar hızlı dönerse sıvının hareketi de o denli hızlı olur. Fan kanalları veya kanatları sıvının hareket yönünü belirler.savrulan sıvı hızla gövdeye akar. Gövde içinde sıvının hızı düĢer [2].
Bir santrifüj pompada sıvının izlediği yol Ģu Ģekildedir. Çarkın emiĢ tarafında meydana gelen vakum nedeniyle sıvı çarkın kanatları arasına girer. Çark kanatları arasından geçen sıvı, çarkın dönü hareketleriyle büyük teğetsel bir hız kazanır. Çark kanatları ile çarkın ön ve arka profili tarafından sınırlanan kanallar arasında sıvı çarkın çıkıĢ tarafına doğru dönme hareketi esnasında meydana gelen santrifüj kuvvetler etkisiyle itilir. Bu Ģekilde oluĢan hareket, sıvının devamlı akıĢını ve pompanın emme etrafındaki emiĢini sağlar. Çark kanatları büyük bir teğetsel hızla terk eden sıvının içerdiği kinetik enerji, sabit difüzör kanatları arasında salyangoz boĢluğunda basınç enerjisine çevrilir.
Yer değiĢtirmeli pompanın tersine santrifüj pompanın basma valfi yoktur. Belirli bir dönme hızıyla en yüksek basınç elde edilir. Bu tür bir pompanın bir hidrodinamik pompa olduğu söylenebilir. Bütün sıvılarda kullanılmaya elveriĢlidir. Plastikten, bronzdan, titanyum ve tantal gibi maddelere kadar her türlü maddeden yapılabilir. [1]
2. TEMEL KAVRAMLAR
Gövde
15 A. BERNOULLĠ DENKLEMĠ:
Basınç, hız ve ivme arasındaki iliĢki ilk kez Bernoulli ve Euler tarafından geliĢtirildiği Ġçin bu denklemler Bernoulli denklemi olarak adlandırılır. Zeminden Z1 yükseklikte U1 Hızlı akıĢkanın basıncı P1, Z2 yükseklikte U2 hızlı aynı akıĢkanın basıncı P2 ise bu Durumda Bernoulli denklemi;
2 2 2 2 1 2 1 1 2 1 2 1 gZ U P gZ U P
Ģeklindedir. Bu denklem sürekli sıkıĢtırılamaz akıĢkanlar için Bernoulli denklemidir. Sürekli sıkıĢtırılabilir akıĢkanlar (gazlar) için
0 ) ( 2 1 2 1 2 2
dP U U YaklaĢımındadır.Bir depodan çıkan gaz için U1<<U2 dır dır. Bu durumda Bernoulli denkleminden U2 hızı,
k k P P RT k k U 1 1 2 1 2 1 1 2
Olur. Burada k anizotropik durumda gazlar için sabit (yoğunluğun değiĢme parametresi), R ideal gaz sabiti, P1 depo içindeki basınç, P2 depo
DıĢındaki basınç, T1 depo içindeki sıcaklıktır. Ayrıca k P
P1/ (1/) dır. Sürtünmeli akıĢlar için Bernoulli denklemi:
Termodinamiğin birinci kanununa göre, bir sisteme dıĢardan bir ısı (Q) veriliyor ve Sistem tarafından bir iĢ (W) üretiliyorsa, sistemin iç enerjisi (E) bunlar arasındaki fark Kadar bir değiĢime uğrar. Sistem tarafından üretilen iĢ (W), basınç kuvvetleri tarafından Yapılan iĢ (Wb), viskoz kuvvetler tarafından yapılan iĢ (Wv) ve sistemdeki pompa, Türbin, fan... Vs tarafından yapılan (Ws) iĢlerin toplamıdır.
Bir pompaya bağlı akıĢkan (su) için Bernoulli denklemi, pompa tarafından yapılan iĢ
m
s gh
W (pompanın gücü – alınır), basınç Pk kaybı olmak üzere;
k m P gH gZ U P gZ U P1 12 1 2 22 2 2 1 2 1 B. POTANSĠYEL AKIġLAR:
16 1)Uniform AkıĢ: Uniform (düzgün) akıĢta akıĢ hızı sabittir. Bu durumda yanal
BileĢenler yoktur. Bu durumda kartezyen koordinatlarda akım çizgileri u=-U ve v=0, Potansiyel çizgileri Uy ve Ux ise bağıntılarıyla verilebilmektedir.
2)Kaynak-kuyu akıĢı: z ekseninde sabit b uzunluğu olan r yarıçaplı bir yüzeyden çıkan Debiyi Q=ur(2πrb), radyal yönde birim b için çıkan debiyi q=2πrur ile gösterirsek q Kaynak gücü olmak üzere
r q
ur
2
ġeklinde ifade edilir. q pozitif ise kaynak akıĢı dıĢarıya doğru, negatif ise içeriye doğrudur. Bu durumda silindirik koordinatlarda
2 q , q lnr 2 dır.
3)Vorteks akıĢı: Vorteks akıĢında radyal yönde hız ur=0 olup, sadece teğetsel yönde
U Hızı söz konusudur. Birim b için debi K 2rU ve K vorteks gücünü göstermek üzere, akım fonksiyonu
r K ln 2 2 K
, potansiyel fonksiyonu da Ģeklindedir.
4)Duble AkıĢı: Duble hareketinin gücü olmak üzere, sin
r Ve dır dır. cos r Bu denklemler; cos r
X Ve y rs i ndönüĢümleri kullanılarak Kartezyen koordinatlarda da yazılabilir.
5)Silindir üzerinde akıĢ: Silindir üzerindeki akıĢ hem uniform hem de duble akıĢın toplamı Ģeklindedir. Bu durumda;
cos cos r Ur , sin sin r Ur
Denklemleri elde edilir. Silindir döndürüldüğünde üzerindeki akıĢ; uniform, duble ve vorteks akıĢının toplamı Ģeklinde olur. Bu durumda silindire etkiyen, sadece sökülasyon (vortekes gücünden, K) kaynaklanan bir kaldırma kuvveti de oluĢur. Dönmeden kaynaklanan bu ek kaldırma kuvvetine Magnus kuvveti ya da etkisi denir [5].
17 ) ( ) ( 2 , 10 b e b e m P P Z Z H
ifadesi ile bulunur. Burada;
Hm=Manometrik yükseklik (m) Pb= Pompa Basma hattı basıcı (bar)
Pe= Pompa Emme hattı vakum basıncı (bar) Zb= Manometrenin pompa eksenine uzaklığı (m) Ze= Vakum metrenin pompa devresine uzaklığı (m) [6].
2.4. KARAKTERĠSTĠK EĞRĠLER
Pompalar sabit devirde, eğer önlerindeki direnç azalırsa artan bir debiye (kapasiteye) sahiptirler. Bu özellikleri nedeniyle, pompalar ayar yapabilme yeteneğine sahiptir. Pompa giriĢ gücü P (kW) dolayısı ile verim (m) ve de NPSH pompa kapasitesine bağımlıdır. Bu değiĢkenlerin birbiriyle olan iliĢkileri pompa karakteristiği dediğimiz eğrilerle gösterilir. Pompa karakteristik eğrisinin değiĢtirilebilmesi için pompa çarkının küçültülmesi,
D2
²
Q2 H2 = = D1
²
Q1 H1veya pompayı çeviren motorun devir hızının değiĢtirilmesi gerekmektedir. n2 Q2 = n1 Q1 n2
²
H2 = n1²
H1 Grafik-1 Sistem karakteristiği18 Sistem eğrisini oluĢturmak için debiye (kapasiteye) karĢı denk gelen basma yüksekliklerini çizmemiz gerekecektir. Sistemde debi arttıkça, basma yüksekliklerinin de artacağı bilinmektedir. OluĢan eğri tesisattaki statik ve dinamik karakteristikleri gösterir.
ÇalıĢma noktası
Tüm santrifüj pompalarda çalıĢma noktası, sistem karakteristiği ile pompa karakteristiğinin kesiĢtiği noktadır. Bu noktayı ötelemek sadece çark çapını, motor devrini veya sistem karakteristiğini değiĢtirmekle mümkündür.
[http://www.ebitt.com.tr/santrifuj_secim.html]
Santrifüj pompanın karakteristik eğrileri, yapılan deneyler sonucunda elde edilir. Elde edilen değerlerdeki en önemli parametre pompanın verimidir (ηp) Çünkü,
pompanın verimi pompa kalitesini gösteren en önemli kriterdir. Pompa verimi;
biçimindedir.
[6]
. POMPANIN ÇEKTĠĞĠ GÜÇ
Pompanın suya verdiği hidrolik güç aĢağıdaki EĢitlik ile elde edilir. 102 m vg H Q P (kW) Burada; vg
P = Pompanın suya verdiği güç (kW) Q= Pompanın verdiği debi (l/s)
= Suyun özgül ağırlığı (kg/l)
Hm= Manometrik yükseklik (m veya mSS) olarak kabul edilmelidirler. Pompanın verdiği debi (Q) ölçmeler sonucu elde edilir [6].
2.6. ÖZGÜL HIZ
Özgül hız küçüldükçe pompa tam radyal tipe dönüĢür ve çap büyür, suyun geçiĢ kesiti daralır. Bu sebeple pompanın küçük özgül hızlı olması hem konstrüktif ve imalat zorlukları doğurur ve hem de, genel veriminin düĢmesine sebep olur. Çok zorunlu kalınmadıkça ve hele seri imalat söz konusu ise düĢük verimli ve küçük özgül hızlı pompa imalinden kaçınılmalı ve özgül hızın büyütülmesi çareleri aranmalıdır.
Benzer Ģekilde, yüksek özgül hızlı pompaların, özellikle çarklarının dönük kanatlı imal edilme zorunluluğu ve konstrüktif güçlükler nedeniyle pahalı olmaları, çok zaman aynı iĢi görecek ve fakat daha ucuz olan pompa tipine kaymayı zorunlu kılar.Bu halde de özgül hızı küçültmek olanakları aranır.
19 Buhar dolu kabarcıkların oluĢmasına ve sönümlenmesine kavitasyon adı verilir. Bu süreç, basıncın sıvı buharlaĢma basıncının altına düĢtüğü pompa içindeki bölgelerde meydana gelir (sıvının buharlaĢma basıncı, sıvının kaynamaya ya da buharlaĢmaya baĢladığı basınçtır). Kavitasyon, pompanın Gerekli Net Pozitif Emme Yüksekliği‟nin (GNPEY) yeterli olmadığı durumlarda oluĢur ve pompada ciddi zararlara yol açabilir [7]. Kavitasyon; neden olduğu istenmeyen mekanik ve hidrolik etkilerden dolayı pompaların teknik olarak güvenilir çalıĢma aralığını, emme yükünü, dönme hızını, pompa boyutlarını ve ekonomikliğini sınırlayan en önemli faktördür.
Santrifüj pompalarda kavitasyona karĢı en hassas, dolayısıyla kavitasyon erozyonunun en çok olduğu bölgeler; kanat giriĢinde emme yüzeyi ve çarkın ön yanağıdır. Kademeli pompalarda genellikle 1. kademede kavitasyonun aĢındırma etkisi hissedilir. Ancak geliĢmiĢ, Ģiddetli kavitasyonda salyangoz gövdesinde ve dilde kademeli pompalarda difüzörde de kavitasyon erozyonu olmaktadır [8].
2.7.1.SATRĠFÜJLÜ POMPADA KAVĠTASYON
Pompa içerisindeki sıvının buharlaĢması (kavitasyon) olmadığı durumda, santrifüj pompalar problemsiz olarak çalıĢırlar.
Kavitasyonun (buharlaĢma) oluĢması için akıĢın herhangi bir yerindeki mutlak basıncın, sıvının o andaki sıcaklığına karĢılık gelen pd buhar basıncının altına düĢmesi gerekir. Pompalarda en düĢük basınç noktası, pompa giriĢinde ve çark kanatlarının ucundadır. Genellikle pompa giriĢ flanĢı ile bu nokta arasında bir basınç düĢümü söz konusudur. Buhar oluĢumunu engellemek için emme flanĢındaki mutlak basınç, sıvının pd buhar basıncından büyük olmalıdır.
AkıĢkanın sıcaklığı kavitasyon oluĢumunda önemli bir faktördür. Sıcaklık arttıkça kavitasyon olasılığı yükselir, çünkü bu durum akıĢkanın buharlaĢma basıncı ile ilintilidir. Ayrıca deniz seviyesinden yükseltinin de, emme yüksekliğine etkisi gözardı edilmemelidir. NPSHm: Pompa emiĢ ağzı basıncının NPSHr eğrisinde görülen değerden daha düĢük olması durumunda pompanın istenilen performansta çalıĢması mümkün olmayacaktır. Pompanın emiĢ ağzında normal olarak var olan basınç değerine NPSHm denmektedir [9].
2.8.NET POZĠTĠF EMME YÜKÜ
Emmedeki net pozitif yük (ENPY) terimi, pompaların emme koĢullarının incelenmesinde kullanılır. Kavitasyonu önlemek için, emme hattındaki herhangi bir noktada mutlak basınç değeri, suyun sıcaklığına bağlı buhar basıncı değerinin altına düĢmemelidir. Pompanın emme hattında suyu pompa çarkına taĢıyan toplam yararlanabilir enerji olarak tanımlanabilen ENPY, mutlak basınç olarak belirtilen genel emme yüksekliği ile buhar basıncınınfarkıdır.ENPY, yabancı literatürde, NPSH harfleri ile simgelenmiĢ olup, açılımı Net Positive Suction Head dir. Su yüksekliği cinsinden ifade edilmekte ve m birimi ile kullanılmaktadır. Ayrıca, tesis, mevcut, kullanılabilir yada faydalı olarak bilinen ENPY, bundan sonra ENPYT bunun yabancı literatürdeki karĢılığı NPSHA yada NPSHa , pompaya ait yada gerekli ENPY değeri de ENPYP - bunun da yabancı literatürdeki karĢılığıNPSHRyadaNPSHrolarakgösterilecektir.
ENPYT=Ha(hse+Hke+hb)
Burada, Ha pompaj tesisinin kurulacağı yerdeki atmosfer basınç yüksekliği (m), hse statik emme yüksekliği (m), Hke emme hattının sürtünme kaybı toplama (düz boru ve armatür kayıpları toplamı) (m) ve hb pompalanan suyun sıcaklığına bağlı buhar basınç yüksekliği (m) dir [10].
20 ġekil.13
3.1.ÇARK
;
Mekanik enerjiyi hidrolik enerjiye çeviren ve üzerinde çok sayıda kıvrık kanatlar bulunan organdır.ġekil.14
21
Eksik Bilgi : 1. Kullanım Yeri : 2. Kullanım Yeri : Parça Listesi özel syf. no:
Nr. Değişiklik Tarih Çizen Yüzey Durumu ISO E
Ölçek : Ağırlık : Malzeme :
Parça Adı : Gr. No.
Form DIN A1 Sayfa : Syf. Ad. Resim Nr : Res. İlk. Nr. Orijinal : Onay Çizen No:
TarihAdı Soyadı
Son Dgs. Nr. CAD Disket No/ADI : Uğur Sağlam 1 : 1 05068393 A. Özdamar SALYANGOZ B A 7,5 300 ø 100 195 154 169 173 16 C D C - D A -B GG 22 0,8 ġekil.15
22
3.3.YATAK
;
Birbirleriyle temas eden ve izafi hareket yapan iki makine elemanı arasındaki bağlantıyı ve izafi hareketi minimum sürtünme kaybıyla sağlayan, kendisine etki eden kuvvet ya da kuvvetlerin doğrultusundaki izafi hareketlere müsaade etmeyen ve bu kuvvetlerin gövdeye iletilmesini sağlayan makine elemanlarıdır [13].ġekil .17: Kaymalı yatak örneği
ġekil.18
23
3.4.FLANġ;
Ġki makine veya tesisat elemanının sızdırmaz Ģekilde birleĢtirilmesineyarayan genelde standart olarak üretilen bir yapı elemanıdır. FlanĢ kullanım yerine göre
demir, bakır, pirinç ve paslanmaz gibi farklı malzemelerden imal edilebilir. FlanĢlar, basınç ve boyutlarına (çap ) göre sınıflandırılır. Çoğu flanĢ dairesel bir konstrüksiyona sahiptir ve iki dairenin cıvatalarla birbirine bağlanmasıyla oluĢturulur. Basınç sınıfına göre flanĢın birbirine bağlantısını sağlayan civata deliklerinin sayısı değiĢebilir. Çok nadiren flanĢın, dörtgen veya eliptik tasarlandığı da olur.
FlanĢ in genel kullanım yeri boru tesisatları olmasına rağmen, makineler üzerinde de kullanımı yaygındır. Makine parçalarının birbirine bağlantısı içinde kullanılır. Tesisata veya makineye kaynaklı veya diĢli olarak bağlanabilirler. Genelde iki flanĢın arasına sızdırmazlık sağlamak için kullanım yerine göre conta yerleĢtirilir.( Teflon veya klıngirik vs. )
FlanĢlardaki en büyük problemlerin baĢında sızdırmazlığın istenilen oranda sağlanamaması gelir. Bunun baĢlıca sebebide flanĢ ları bağlantı elemanları ve sızdırmazlık elemanıyla bir bütün olarak görmemekten kaynaklanır. Bu yanlıĢ tespit hatalı montaj tekniğiyle birleĢtiğinde, flanĢ ların sızdırmazlık problemleri kaçınılmaz olur. FlanĢ ların montajında mümkün oldugu kadar paralel ve aynı anda dönme momenti (tork) ve montajdaki civatalama yükünün bütün civatalara eĢit olarak verilmesine dikkat etmek gerekmektedir. Esas olan bu özelliklere dikkat edildikten sonra montajda aktarılan cıvatalama ön yükünün, montaj sonrasında da (flanĢ çalıĢmaya baĢladığında) kalıcılığının sağlanabilmesidir. Çünkü flanĢ çalıĢtırıldığı zaman, FlanĢ bağlantılarındaki cıvatalama ön yükünün, flanĢ ın içinden geçen basınç dan dan büyük olması ve aynı zamanda civatalara aktrılan civatalama ön yükünün devamlılığının sağlanmıĢ olması gerekir aksi takdirde flanĢın sızdırmazlığı sağlanamaz. Bunun dıĢında kullanılan yöntemlerde flanĢ yüzeylerinde sonradan düzeltilmesi gereken hasarlar oluĢturabilir. Bu hasarları azaltmak ve sızdırmazlığı sağlamak için civataların dönme momenti kontrollü sıkılması gerekir.
24
ġekil.21
25
3.5.DĠFÜZÖR;
Bazı pompalarda çark ile salyangoz arasına yerleĢtiren ve çarktan çıkan suyun hızını azaltarak yüksek kinetik enerjinin bir kısmını basınç enerjisi haline dönüĢtüren halka Ģeklindeki kısım.ġekil.23
3.6.SALMASTRA KUTUSU;
Mil ile gövde arasında doğacak kaçakları önlemek için alınmıĢ düzendir.26
3.7.SALMASTRA:
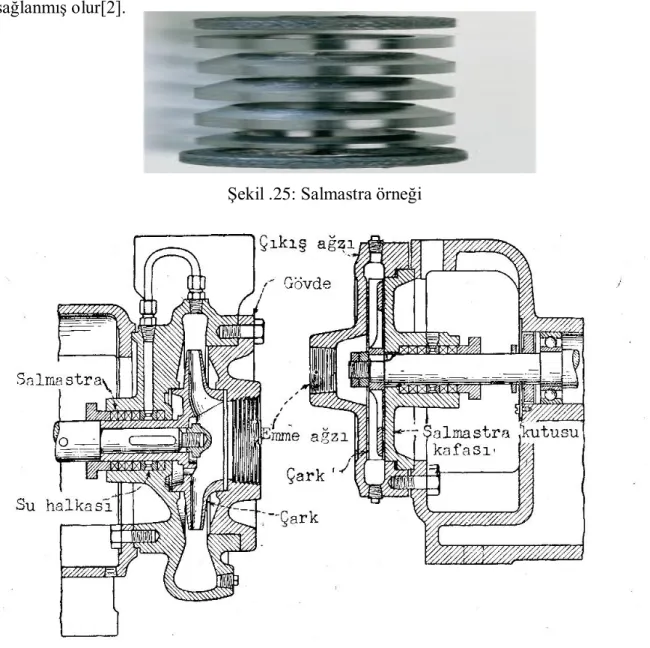
Biri hareketli, diğeri sabit bulunan iki makine parçası arasında sızdırmazlık sağlayan parçalara salmastra denir. Genelde pompa, musluk, mil yatağı gibi yerlerdekullanılır.BaĢka bir tarifle, eğer bir makine parçasının içinden kuvvet geçmesini istiyorsanız, fakat akıĢkan geçmesini istemiyorsanız, araya salmastra koymalısınız. Zira salmastranın alternatifi son derece pahalı yöntemlerle iĢlenmiĢ ve yine de uzun süre sızdırmazlık garantisi bulunmayan, hassas yüzey iĢleme yöntenmerlidir. Bu yöntemlere mahkum olmak yerine salmastra konulur ve sıdırmazlık ucuz ve güvenli bir Ģeklilde sağlanmıĢ olur[2].ġekil .25: Salmastra örneği
27
3.8.MĠL;
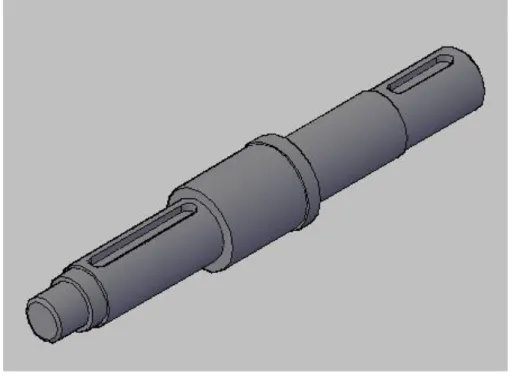
Tahrik organı ile çark arasını bağlayan ve çarkı taĢıyan organdır. Tulumbanın salyangoz ve diğer organları taĢıyan kısımdır [13].ġekil .27: Milin kesiti ve iç yapısı
28
3.9.EMME BORUSU;
Emme haznesiyle tulumba giriĢi arasındaki borudur [2].ġekil.29
29
3.10.DĠġ KLAPESĠ VE SÜZGEÇ;
Emme borusunun giriĢinde tek taraflı akıĢ sağlayan yani tulumba dururken tulumba içindeki ve emme borusundaki suyun geri boĢaltılmasına engel olan bir klape mevcuttur. Genel olarak bu klape bir süzgeç içerisine konmuĢtur.Dönen çark ile tulumba gövdesi arasında bulunan ve çarkın basma kısmında emme kısmına bu geçit yolu ile kaçan akıĢkan miktarını önlemek için alınan düzendir.
ġekil.31
3.11.RULMAN;
Dairesel veya eksenel hareketle iĢ yapan veya çalıĢtırılan birçok makinada rulmanlar kullanılır. Rulmanların asıl vazifesi; verilmesi gereken hareketin mümkün olan en az sürtünmeyle yani güçten en az ödün verilerek iletimini sağlamaktır.30
3.12.GLEN (SALMASTRA BASKISI);
Santrifüj pompalarda santrifüj su çekerken salmastra baskısı altından dakikada 30-40 damla su sızmasına dikkat edilmelidir. Bu damlalar salmastranın yanmasını önleyecektir. Eğer bu damlalar dakikada 30-40 seferden fazlaysa salmastra baskısı sıkılmalıdır. Ayrıca santrifüj yağı, kullanımdan önce kontrol edilmelidir.[14] ġekil.33: Salmastra baskısı
Pompalara gerekli miktarda salmastra halkası yerleĢtirildikten sonra salmastra baskı kapağı yerleĢtirilerek saplama somunları sıkıca sıkıĢtırılır, sonrada somunlar gevĢetilerek kapağa biraz gevĢeklik verilir.
Eğer pompa çok fazla ısınıyor ve çok fazla güç harcıyorsa salmastra baskısı çok sıkılmıĢ olabilir. Salmastra baskısının kontrol edilip icap ederse değiĢtirilmesi gerekir.
YumuĢak salmastralar Mekanik salmastralar
KartuĢ tip montaja hazır mekanik salmastralar Manyetik kaplinli hermetik ekipman.
Yumusak Salmastra Mekanik Salmastra
Kartus Tip Mekanik Salmastra Manyetik Sistem
31
3.13.GLEN SAPMALARI
;
Pompalarımızda kullanıcıya sıkıntı getiren serbest saplamalar yoktur. Glen saplamaları, “Integral” serisi diĢli pompalarımızda konsola, ve “M” serisi pompalarımızda ise pompa gövdesine sabitlenmiĢtir.Böylece:
Eksenlerinden kaçamazlar.
Kolayca monte&demonte edilebilirler. Paslanmaz malzeme seçeneği mevcuttur.
ġekil.35 Pompa Seçimi
Pompa tipinin seçiminde, çalıĢma noktasının (sistemin karakteristik eğrisi ile pompanın kendi karakteristik eğrisinin kesiĢme noktası) pompanın hidrolik veriminin mümkün olduğunca yüksek olduğu bir bölgede oluĢmasına dikkat edilmelidir
Özellikle ısıtma ve soğutma suyu tesisatlarında sirkülasyon pompası olarak kullanılan santrifüj pompaların basma yüksekliğinin seçiminde, abartılı davranılmamalıdır.
Karakteristik eğrisinin alt bölgesinde çalıĢtırılan pompalarda (basınç kayıplarının öngörülenden daha küçük olduğu durumlar), kavitasyon ve motor yanması gibi sorunlar oluĢabilmektedir. Böyle durumlarda ayar vanaları kullanılarak, tesisata yapay direnç oluĢturulup sistemin karakteristik eğrisiyle daha uygun bir noktada kesiĢmesi sağlanmalıdır.
Pompanın karakteristik eğrisinin değiĢtirilebilmesi için pompa çarkının küçültülmesi (ġekil 2) veya pompayı tahrik eden motor devir hızının değiĢtirilmesi gerekmektedir Kataloglarda değerler, kinematik viskozitesi n= 10m2/s ve yoğunluğu r = 1000 kg/m3 olan akıĢkanlar, yani sıcaklığı yaklaĢık 20 0C‟deki normal su için geçerlidir.
Viskozitesi ve yoğunluğu sudan farklı olan akıĢkanların kullanıldığı tesisatlarda (örneğin glikol veya yağ oranı % 10‟u geçen su karıĢımları), pompa seçiminde bu durum dikkate alınmalıdır. Çünkü bu tip tesisatlarda hem sistemin kendi karakteristiğinde farklılık, hem de pompanın performans değerlerinde sapmalar oluĢur.
Pompalanan akıĢkanın viskozitesi arttığında, pompanın, bu akıĢkan için, debi Q, basma yüksekliği H ve verim değerleri düĢer, gereksimim duyduğu tahrik gücü P ise artar[11].
32 POMPA KISIMLARI:
ġekil.36
1-
Salyangoz
2-
Çark
3-
Salmastra
4-
Yatak gövdesi
5-
Salmasta baskı burcu
6-
Glen
7-
Yatak kapağı
8-
fener halkası
9-
Mil
10-
Salmastra burcu
11-
Çark
somunu
12-
Yıpranma halkası
13-
Destek ayak
14-
Su siperi
15-
Çark kaması
16-
Kaplin kaması
17-
Rulman
18-
Yağ keçesi
33 DEBĠSĠ, DEVRĠ VE BASMA YÜKSEKLĠĞĠ VERĠLEN BĠR POMPANIN ĠLGĠLĠ HESAPLAMALARI VE BOYUTLANDIRILMASI
Bir akım makinasını tanımlayan beĢ büyüklük vardır. Tanım büyüklükleri adını alan bu büyülükler; n dönme sayısı, Q debi, Y özgül enerji, η verim ve P güçtür. Bu projede tasarımı yapılacak çarkın istenilen özellikleri, debi Q = 90 m3/ saat ve basma yüksekliği H = 80 m dir. Verilen verilere ek olarak, devir sayısı 3000 d/d seçildi.
Q=90m3/h n=3000 d/d H=80 m
Basma Yüksekliği (H)
Basma yüksekliği, pompa dizayn sırasında pompanın akıĢkanı basması gereken yüksekliktir. ġekilde, pompa, hazneden emdiği akıĢkanı yukarı depoya basmaktadır. Ġki haznenin açık yüzeyleri arasındaki yükseklik farkına geometrik yükseklik Hg, emme flanĢı ile emme haznesi açık yüzeyi arasındaki yükseklik farkına emme yüksekliği adı verilir.
ġekil. 37 Pompa Basma Yüksekliği Pompa v1 v2 2 1 H g H s
34 Pompanın basma yüksekliği, geometrik yükseklik ile emme ve basma borularındaki kayıpların toplamına eĢittir. Pompanın içinden geçen her kg akıĢkana gHg kadar enerji kazandırması, akıĢkanı Hg yüksekliğine çıkarması için yeterli değildir. Bu iĢi yapabilmesi için, pompanın ayrıca akıĢkan yolundaki tüm kayıpları karĢılaması gerekir[1].
Özgül Hız (nq)
Pompa seçiminde en önemli husus, belli bir debi ve basma yüksekliği için en uygun pompanın belirlenmesidir. Bu seçimde, en çok kullanılan kriter özgül hız kavramıdır. Bu, incelenen pompaya geometrik olarak benzeyen ideal bir pompanın birim hacmi birim yüksekliğe basması gereken hızdır.
Özgül hız 4 3 H Q n nq (2.1) Bağıntısıyla verildiğinden, bu çalıĢmada
d d nq 17,74 / 80 3600 / 90 3000 4 / 3 olacaktır.
ns = 3,65 . nq‟den, ns = 3,65 × 17,74 = 64,72 d/d olarak bulunur.
Bulunan değere göre, ġekil 2.2‟den görüldüğü gibi, pompa çarkının tipi tam santrifuj çarktır. (Tam santrifuj çark için ns = (45-130 ) aralığındadır).
ġekil.38 Özgül Hıza Göre Pompa Tipleri ns= 45-130
ns= 130-300
ns= 300-600
35 Eğer bulunan değer, 45‟ten küçük çıksaydı, bu durumda pompanın kademeli yapılması söz konusu olacaktı[2,5].
Mil gücü hesabı pompa mil H Q P 75 3 : m kg
s mQ: 3 H :[Sıvı sütunu ] Pmil :
Beygirgücü
Mil Gücü: pompa mil H Q P 75 (2.7) formülünde, ρ =1000 kg/m3alınarak pompa mili gücü aĢağıdaki Ģekilde hesaplanır:
BG Pmil 31.11 75 , 0 . 75 1000 . 80 . 3600 90 olur. Motor gücü hesabı:Tablo-1: Emniyet katsayısı
α emniyet sayısı Pompa mili gücü 1,20 – 1,30 Pmil < 5 BG
1,10 – 1,20 5 BG < Pmil < 25 BG
1,05 – 1,10 Pmil > 25 BG
Elektrik motoru seçimi söz konusu ise, senkron devre tekabül eden motor tipi ve güç (kW olarak) belirlenmelidir. (1 BG = 0,74570 kW)
Tablodaki verileri göre α=1,08 olarak kabul olarak kabul edilir. Pmotor = α × Pmil
36 MĠL ÇAPI
Mil çapı, kullanılacak malzeme açısından, adi mil çeliği veya karbon çeliği olarak iki malzeme türünde hesaplanır. Minimum mil çapı, aĢağıdaki bağıntıdan bulunur.
3 360000 n P dmil motor (2.9)
burada, τ, Malzemenin kayma gerilmesidir.
Malzeme olarak, adi mil çeliği seçilsin. Adi mil çeliği (St37) için
τ
=
120 kg/cm2 olduğundan mm cm dmil 3,247 32,47 120 3000 22 , 34 360000 3 olarak bulunur. Norm çaplar 15-20-25-30-35-40-50-60-70-80-90 mm Ģeklindedir.Buna göre adi mil çeliği malzemesinden, mil çeliği çapı olarak, 35mm kullanmak uygundur.
VERĠMLER 1.Pompa verimi
Pompa verimi, özgül hıza bağlı olarak aĢağıdaki sekilden bulunur.
37 Özgül Hıza Göre Pompa Verim diyagramı
Bu Ģekilden, nq= 17,74 d/d ve Q = 90 m3/h (25,04 l/s) için ηpompa ≈ %75 olarak okunur. 75 % pompa 2.Hidrolik verim
AkıĢkan, makinenin içinden geçerken sürtünme kayıplarına uğrar. AkıĢkan katı cephelere sürtünmesinden ve iç sürtünmesinden açığa çıkan ısı bir daha geri alınmamak üzere ortama geçer ve kaybolur. AkıĢkan sürtünmelerinin oluĢturduğu, bu kayıplara hidrolik kayıplar denir. Pompalarda kanatlardan akıĢkana aktarılan enerjinin bir kısmı hidrolik kayıplara harcanır. Kalan kısmı pompadan geçen akıĢkan tarafından kazanılır.
Pompa çarkı kanatlarından akıĢkana aktarılan enerji ancak belirli bir yüzdesi akıĢkana geçer, geri kalanı hidrolik kayıplara harcanır. Bu yüzdeye, hidrolik verim denir[1,5].
Hidrolik verim 1 0,0710,25
Q
hidrolik
(2.4)
Bağıntı ile verilir. Buradan
0,98 90 071 , 0 1 071 , 0 1 0,25 0,25 Q hidrolik olacaktır 3.Mekanik verim
Yatak ve salmastra sürtünmeleri ile kavramadaki hava sürtünmelerinin sebepolduğu kayıplara, mekanik kayıplar denir. Yağ pompası, hız düzengeci gibi yardımcı elemanların hareketlerini makine milinden almaları halinde makinelerin sarf ettikleri güç ve mekanik kayıplar dâhil olur.
Genel bir kabulle pompanın mekanik verimi %96 civarında alınır.
38 4.Volumetrik verim
Dönel parçalar ile sabit parçalar arasında metal sürtünmesi olmaması için daima belirli bir açıklık bırakılır. Böylece pompa çarkının gövde içinde serbestçe dönmesini sağlanır. Basınç pompa çarkının emme tarafında düĢük, basma tarafında yüksektir. Bu nedenle çarktan çıkan akıĢkanın hepsi basma borusuna gitmez. Bir kısım debi Qk aralığı takip ederek emme tarafına geri döner. Böylece çark devamlı olarak bu kaçak debiye ρQkYk kadar güç yükler.
Pompalarda kaçak kaybı volumetrik verim ile hesaplanır. ηv = Q / (Q + Qk) = Q / Q' Burada ηv ,volumetrik verim Qk ise kaçak debidir.
Pompa genel verim ifadesinden volumetrik verimi hesaplanacak olursa
ηpompa = ηhidrolik× ηvolumetrik× ηmekanik (2.6)
ηvolumetrik = ηpompa / ηhidrolik× ηmekanik = 0,75 / (0,98×0,95) = 0,81
olarak bulunur. Buradan
Q‟ = Q / ηvolumetrik = 90 / 0,81 = 111,12 m3 /h Olacaktır.
39
1.POMPA ORGANLARININ SEÇĠMĠ
Pompa Organının GiriĢ Boyutları
ġekil.40. Örnek Çark Kesiti
Bağıl hız ile mutlak hızın kesite dik bileĢenleri birbirine eĢittir (Wm=Cm). Cm1 akıĢkanın emme kenarındaki, yani çark kanatları içine girdiği andaki; Cm2 ise basınç kenarındaki, yani akıĢkanın kanatlardan çıkıĢındaki mutlak hızlarının kesite dik bileĢenleridir. ÇeĢitli yollardan Cm1 ve Cm2 değerleri belirlenebilir[2,3].
Bu projede, Kcm1 ve Kcm2 değerlerinin iligili diyagramdan okunarak Cm1 ve Cm2 değerleri hesaplanacaktır. Cm1 ve Cm2 aĢağıdaki formüllerle bulunur:
Cm1 Kcm1 2Hg ve (3.1)
Cm2 Kcm2 2Hg . (3.2)
Kcm1 ve Kcm2 hız katsayıları, ġekil 3.2‟den özgül hıza bağlı olarak bulunur.
D 2 D 1 D 1d D g D 1i D 0 d m il b2 b1
40 ġekil.41: Kcm1 ve Kcm2 Değer Tablosu
Buradan; nq = 19,60
Kcm1=0,126 ġekil-3‟den okunur.
Meridyen Hızı Hesabı: Suyun kanata giriş hızı;
g H K Cm1 cm1 2 * s m Cm10,126 2*70*9,814,67 /
AkıĢkanın çarka girmeden önceki hızı
1 0m (0,90...0,95) Cm
C
C0m = 0,9×4,67 = 4,2025 m/s bulunur.
GiriĢ kesit alanı
Q’ =Q/v=90/0,81=111,24 m3/h =0,0309 m3/s A0 = Q′ / C0m
41
Çark göbek çapı Dmil = 35 mm seçildi
Dg = 1,4 × Dmil
Dg = 1,4 × 35= 49 mm bulunur
Göbek kesit alanı
Ag = 4 2 g D Ag = 3 2 2 10 885 , 1 4 049 , 0 4 Dg m2
Toplam giriĢ kesit alanı
Atop = A0 + Ag
Atop = 1,885103+ 0,0073 = 0,00924 m2 bulunur.
Çarka giriĢteki toplam kesit alanın dıĢ çapı
D0= 00924 , 0 4 4Atop m = 109 mm
Kanat üzerindeki orta akım iplikçiğinin çapı
Schulz katsayısı σs = 0.90 - 0.95 değerleri arasından seçilir. σs=0,95 için;
D1 = σs. D0
D1 = 0,93 × 109= 100,911mm → 102 mm kabul edildi
Çark giriĢindeki akıĢkan çevresel hız
U1 = 60 1n D U1 = 16,0221 60 3000 102 , 0 m/s bulunur.
42
Çark giriĢ kanat açısı
1 1 1 tan U Cm 0 0 1 1 0,2914 16,249 16 0221 , 16 67 , 4 tan Bulunur.
Arzulanan debiye ulaĢmak için, hesaplanan β1 açısını bir δ1 (angle of incidense (20...60)) açısı ekleyerek arttırmak gerekir. Bu açıklamalardan yola çıkarak, bulunan β1 açısı δ1 kadar arttırılır. δ1 açısı 2°-6° arası bir değer olduğuna göre, 4° seçilebilir:
β1′ = β1 + δ1 = 16+ 4 = 20° GiriĢ hız üçgeni w1 = Cm1 / sin β1′ =4,67 / sin 20° = 13,492m/s, wu1 = Cm1 / tanβ′ =4,67 / tan 20° = 12,65 m/s, Cu1 = U1 – wu1 =16,022-12,65=3,367 m/s, C1 = 21 2 1 u m C C = 4,6723,3672 C1 = 5,7548m/s tan α1 = Cm1/Cu1 = 4,67/3,367=1,386 α1 = 54,232° Wu1 Cu1 U1=16,022 m/s Cm1 = 4 ,6 7 m /s W1 C1 α1 β1′
43
Çark giriĢi kanat dıĢ ve iç özellikleri
D1d = D0 + 0,75 (DıĢ çapı) D1i = 2D1 - D1d (Ġç çapı )
U1d = (π.D1d.n) / 60 (DıĢ çevresel hız ) U1i = (π.D1i.n) / 60 (Ġç çevresel hız) β1d = arctan (Cm1 / U1d) (DıĢ açı)
β1i = arctan (Cm1 / U1i) (Ġç açı) denklemlerinden; DıĢ çapı: D1d = 109+ 0,75 = 109, 75 mm → 109 mm alınır Ġç çapı : D1i = 2 × 100.911 -109 = 93 mm bulunur. DıĢ çevresel hız : U1d = (π. 0,109.3000) / 60 = 17,16 m/s Ġç çevresel hız : U1i = (π. 0,093.3000) / 60 = 14,54m/s DıĢ açı: β1d = arctan ( 4,67 / 17,16 ) = 15,220 Ġç açı: β1i = arctan ( 4,67 / 14,54 ) = 17,800
Kanat sayısı ve kanat giriĢ kalınlığı henüz hesaplanmamıĢ olduğu için, b1 giriĢ geniĢliği önce yaklaĢık olarak hesaplanır ve daha sonra daralma katsayısının, λ1, gerçek değeri bulunduktan sonra b1 geniĢliğinin gerçek değeri bulunur.
λ1‟in 0,6-0,7 arasında olacağı öngörülerek; λ1=0,65 alınır.
Q′ = λ1. π . D1.b1.Cm1 mm m C D Q b m 15 , 32 03215 , 0 65 , 0 * 67 , 4 * 102 , 0 * 0,03093 1 1 1 1 bulunur.
Bulunan b1 değeri de, çıkıĢ özelliklerinin hesaplanmasından sonra tekrar hesaplanacak ve sonucun doğruluğu belirlenecektir.
44
Çarkın ÇıkıĢ KoĢulları ve Boyutlarının Hesabı
q s n n 3,65*12
pompa için 60 , 19 * 75 , 0 * 65 , 3 12 s n 60 , 82 s n
Bulunan bu değerler ve ġekil-3‟den okunacak;
ġekil.42: Basınç Katsayısının ns Özgül Hıza Göre DeğiĢimi ve D1 / D2 Oranları
(basınç katsayısı)=1,04 olarak Ģekilden okunur. Çark çıkıĢ çapı 33 , 36 04 , 1 81 , 9 * 70 * 2 * * 2 2 g H U m/s hesaplanır. D2 = çıkıĢ çapı m mm n U D 0,231 231 3000 33 , 36 60 . 60 2 2 olarak bulunur.
45 Formüllerle bulunan çark çapının istenen manometrik yüksekliği sağlamama olasılığı olduğu için, çark konstrüksiyonunda hesaplanan değerin biraz fazlası alınır. Bu fazlalık iĢleme payını oluĢturduğu gibi istenen manometrik yüksekliğe ulaĢmada da faydalı olur. Pompa çalıĢtırılıp manometrik yükseklik ölçüldükten sonra, eğer istenenin üzerinde fazlalık var ise, dıĢ çap torna edilerek, olması gereken seviyeye indirilebilir. Bu açıklama gereğince, dıĢ çap 232 mm olarak kabul edilir.
D1/D2 Çap kontrolü;
0,41< D1 / D2<0,46 ġekil-3‟den maximum ve minimum değerler okunur.
D1 / D2 = 100,911/231=0,43 bulunur.
Bulunan D1 / D2 değeri uygun aralıktadır. Tam merkezcil kanat tipi için 28-300
arasında bir açı öngörülmüĢtür. Buna göre kanat açısını β2= 300
kabul edildi. ÇıkıĢ hız üçgeni Kcm2=0,10 ġekil.42‟den okunur. g H K Cm2 cm2 2. . = 0,10 2.70.9,81 = 3,705m/s w2 = Cm2 / sin β2 = 3,705 / sin 300 = 7,41m/s wu2 = Cm2 / tanβ2 = 3,9618 / tan 300
= 6,86 m/s Cu2 = U2 – wu2 = 36,33 – 6,86= 29,47974 m/s β2 U2=36,33/s C m2 W2 C2 Wu2 Cu2
46 C2 = 22 2 2 2 2 u 3,705 29,47974 m C C C2 = 29,711 m/s tan α2 = Cm2 / Cu2 = 3,705/29,47974 α2 = 7,160 bulunur.
Kanat Sayısının Belirlenmesi
Euler denklemi sonsuz kanat sayısına göre yazılmıĢ ve sonsuz incelikte kanatlar için düĢünülmüĢtür. Bir santrifuj pompada, yeteri kanat sayısı hesaplamak gerekir. Pratikte, pompa dizaynında, yaklaĢık formüller kullanarak kanat sayısı hesaplanır. Gerçekte kanat sayısı hesabını veren formül yoktur. Bunun yerine yaklaĢık formüller kullanılır.
2 2 1 m 0 25 2 20 30 m Kanat sayısı; m D D D D z 6,5 sin 1 2 1 2 Bağıntısı ile, 7 25 sin 911 , 100 231 911 , 100 231 5 , 6 z olarak bulunur.
47
Çark ÇıkıĢ GeniĢliği λ2 = (daralma faktörü)
e2 = 5 mm ( kanat kalınlığı) seçildi.
Ġmalat kolaylığı bakımından tam santrifüj pompalarda, giriĢteki e1 kanat kalınlığı e2 çıkıĢ kalınlığı eĢit alınabilir.
Buna göre çıkıĢ daralma faktörü;
2 2 2 2 ) sin / ( 1 D e z
903 , 0 231 * 30 sin / 5 7 1 2 olarak hesaplanır. 2 2 2 2 m C D Q b mm m b 0,0130 13 705 , 3 * 903 , 0 * 231 , 0 * 0309 , 0 2 mm b2 13 seçilir. GiriĢ Daralma Faktörü ve GiriĢ GeniĢliği Kontrolü
Çark giriĢ geniĢliği hesaplanırken, λ1 değeri, sonradan kontrol edilmek üzere kabul edilmiĢti. ÇıkıĢ özellikleri bulunduktan sonra artık bu kontrol yapılabilir:
609 , 0 102 * 16 sin / 5 * 7 1 * sin / * 1 1 1 1 1 D e zDaha önceki hesaplarda λ1 = 0,7 olarak kabul edilmiĢti ve bu değere göre giriĢ geniĢliği 34,011 mm olarak bulunmuĢtu.
Yeni daralma faktörü ile yeniden giriĢ geniĢliği hesaplanacak olursa;
mm m C D Q b m 64 , 34 034 , 0 65 , 0 * 67 , 4 * 100911 , 0 * 0309 , 0 1 1 1 1 =35 mm olarak alınır. ġu halde;
Çarkın çizimi için gerekli tüm hesaplamalar ve grafik okumalar yapılmıĢtır ve tasarım Ģu noktadan sonra eldeki verilerle gerçekleĢtirilebilir denilir.
1 b
48
6.POMPA ÇARK ÇĠZĠMĠ ĠÇĠN HESAPLAMALAR
Çark çizimi ve imali için gerekli büyüklükler hesaplanmıĢtır. Bundan sonra elde edilen değerlere göre, çarkın meridyen kesidi ve daha sonra kanat sayısı ve açıları kullanılarak, çizimi yapılacaktır.
6.1.MERĠDYEN KESĠTĠNĠN ÇĠZĠMĠ;
Tam merkezkaç pompa çarkının meridyen kesitinin çizimi için Ģu yollar izlenir. Öncellikle daha önce hesaplanmıĢ olan dg, dmil, D1i, D1d, D1, D0, D2, ölçüleri paralel çizgiler halinde çizilir.
( dmil = 32,47 mm , dg = 49 mm , D1i = 97,56 mm, D1 = 102 mm, D0 = 108,5 mm, D1d = 109,25 mm, D2= 231 mm olarak hesaplanmıĢtı ). =35 mm b2 13mm
Çark giriĢ ve çıkıĢ arası mesafe: (D2-D1)/2 = (231–100,911)/2 = 65,04mm
Bu mesafe 10 eĢit aralığa bölünürse 6,5 mm aralıklı 9 adet paralel çizgi çizilmesi gerekecektir. Çark giriĢinden baĢlanarak giriĢ ve çıkıĢ arası mesafe aralarında 6,5 mm olacak Ģekilde 10 parçaya bölünür. Bölüm çizgilerin orta eksene uzaklıklarına r, her bölüm çizgisinin belirlediği geniĢlikteki çaplara da b denecek olursa, tüm b × r değerleri grafik olarak çizilince lineer bir doğru göstermesi gerekir. Bu aĢamada bölüm çizgilerinin orta eksene uzaklıkları r bellidir. Ancak, giriĢ ve çıkıĢ (b1,b2) haricindeki geniĢlikler bilinmemektedir. Bilinmeyen aradaki geniĢlikler yukarıda bahsedilen b × r değerlerinin lineer bir doğru oluĢturması prensibi ile bulunacaktır. GeniĢlikler bulunduktan sonra, pompa çarkının üst kapağı oluĢturulabilecektir.
r ve b × r değerleri bir lineer doğru oluĢturduğuna göre ve uç noktaları da bilindiğine göre lineer doğru genel denklemi çıkarılabilir. Bu denklemden bilinmeyen b × r değerler bulunabilir ve aradaki b değerleri de bulunabilir.
1 b
49 b × r = y ve r = x olsun.
Lineer doğru genel denklemi,
0 1 0 1 0 0 x x y y x x y y olduğundan; y0= b1 × r 1= 35x51= 1785 y1= b2 × r2= 13x116=1508 x0= r1= 51 x1= r2= 116 51 116 1785 1508 51 1785 x y olacaktır.
O halde, lineer doğrunun denklemi , y = -4,26x + 2002,33 olur, buradan b × r = -4,26x + 2002,33 olur.
Bu denklemde r değerleri yerleĢtirerek, b değerleri bulunur (Tablo-2).
Tablo-2: b × r tablosu
Böylece, pompa çarkının giriĢten çıkıĢa doğru her bölüm doğrusu üzerindeki geniĢlik değeri saptanmıĢtır. Bu aĢamada, pompa çarkının üst kapağı çizilebilir. Üst kapağı çizmek için, her bölüm doğrusu arka kapak iç yüzeyi (A-B arası) doğrusu ile kesiĢtiği noktadan itibaren paralel yönde içe doğru her noktanın b / 2 mesafesi alınarak geniĢliklerin merkezleri tespit edilir. Tespit edilen bu merkezler, bir yay ile birleĢtirilecek olursa, orta akım iplikçiği meydana çıkar. Her merkezde b daireleri çizilerek geniĢlik daireleri oluĢturulur. Bu aĢamadan sonra üst üste yığılan dairelere teğet olacak biçiminde C noktasından baĢlanarak d noktasına kadar yaylar çizilir. Böylece, pompa çarkı üst kapağının yüzeyi oluĢturulur
r (mm) b (mm) b*r b/2 51 35,00137 1785,07 17,50069 57,5 30,56313 1757,38 15,28157 64 27,02641 1729,69 13,5132 70,5 24,14184 1702 12,07092 77 21,74429 1674,31 10,87214 83,5 19,72 1646,62 9,86 90 17,98811 1618,93 8,994056 96,5 16,48953 1591,24 8,244767 103 15,1801 1563,55 7,590049 109,5 14,02612 1535,86 7,013059 116 13,00147 1508,17 6,500733
50 Çark kanat çizimi:
Tam santrifuj pompalarda, çark kanatlarının oluĢturulması için temelde üç metot var. Metotlar Ģunlardır:
1. Tek daire metodu 2. Çift daire metotu 3. Nokta nokta metodu.
Çok küçük çarklar haricinde, genellikle, çift daire metodu uygulanır. Çark çiziminde, üç önemli noktaya dikkat edilir:
1. Kanat giriĢ ile çıkıĢ açısı arasında, kanat boyunca sürekli bir geçiĢin sağlanması. 2. Kanatlar arasındaki aralığın meridyen hızların (bağıl hızlar) doğrusal birleĢimini
sağlayacak Ģekilde olması.
3. Kanatlar arasındaki koniklik açısının akıĢkanın kanat cidarlarından ayrılmasına imkan vermeyecek Ģekilde (genelde 100‟den küçük) sağlanması.
Pompa çarkının karĢı görünüĢünün çizimi ve kanatların yerleĢtirilmesi için, daha önce hesaplanan D1, D2, D1i, D1d çapları, Z kanat sayısı, et kalınlığı ve β1 ve β2 giriĢ ve çıkıĢ kanat açıları değerleri kullanılacaktır.
51
6.2.NOKTA NOKTA METODU ĠLE KANAT ÇĠZĠMĠ ĠLE ĠLGĠLĠ
HESAPLAMALAR
Kanat çizimi için en uygun yol, β1 giriĢ açısı ile β2 çıkıĢ açısına kadar kanat boyunca nokta nokta β açılarının değerini saptamak ve kanadı bu açılara uygun yerleĢtirmektir. Kanat giriĢinde açılar gerçek değerlerinden biraz farklı olsa bile, kanadın büyük bir kısmında gerçek açı ile izdüĢümü, büyük bir hata yapmaksızın, aynı kabul edilir.
Bu metotta, yapılacak ilk iĢlem, kanat boyunca hız üçgenlerini çizmek ve β açılarının değerlerini giriĢten çıkıĢa kadar hesaplamaktır. U teğetsel hızlarının ve Cm meridyen hızlarının çark giriĢi ve çıkısı arasında lineer olarak değiĢeceği bilinmektedir. GiriĢ ve çıkıĢ hız üçgenleri bilindiğine göre, çark meridyen kesiti boyunca U ve Cm hızlarının doğrusal değiĢimleri göz önünde tutularak, çizilen hız üçgenleri diyagramıyla, herhangi r yarıçapına ait β kanat açısı kolayca bulunur.
Bu tabloda, nokta sayısı dizayncının kendi tercihidir. Çok nokta ile hesap yapılırsa, daha az kırıklı bir profil elde edilir. Çok nokta ile hesap yapmanın tek avantajı, budur. Kanadın iç ve dıĢ yarıçapları arası mesafesinin, eĢit aralıklarda r yarıçaplı dairelere bölünmesi gerekir. Kanat meridyen kesiti çiziminde de ġekil-4, bu mesafeler 10 eĢit parçaya bölünmüĢtü ve geniĢlikler saptanmıĢtı. Burada da aynı bölüm Ģekli kullanılabilir. Buna göre 1. nokta giriĢ, 11. nokta çıkıĢ olmak üzere 11 noktadan bahsedilecektir. Yarıçap (r) değerleri de yerine yazılır ( r1 = D1/ 2 ve r2 = D2/2) . ∆r, iki çizgi arası uzaklıktır.
Burada; r1 = 0,102 / 2 = 0,051 m ve r2 = 0,232 /2 = 0, 116 olmaktadır. 1
m
52
nokta r (m) ∆r (m)
Cm
(m/s) W(m/s)
sinβ =
Cm/W β r.tanβ 1/r.tanβ ∆a ∑∆a ν
1 0,051 0 4,67 13,49219 0,346126192 20,25056 0,01881546 53,14779 0 0 0,00 2 0,0575 0,0065 4,57359 12,88416 0,354977761 20,79208 0,02183311 45,802 0,321587 0,321587 18,42 3 0,064 0,0065 4,47718 12,27613 0,364706157 21,3895 0,0250678 39,89182 0,278505 0,600092 34,37 4 0,0705 0,0065 4,38077 11,6681 0,375448454 22,05203 0,02855835 35,01603 0,24345 0,843542 48,31 5 0,077 0,0065 4,28436 11,06007 0,387371872 22,79107 0,0323537 30,90837 0,214254 1,057797 60,58 6 0,0835 0,0065 4,18795 10,45204 0,400682539 23,62085 0,03651645 27,38492 0,189453 1,24725 71,43 7 0,09 0,0065 4,09154 9,84401 0,415637511 24,55947 0,04112823 24,3142 0,168022 1,415272 81,06 8 0,0965 0,0065 3,99513 9,235981 0,432561537 25,63023 0,04629768 21,59936 0,149219 1,564491 89,60 9 0,103 0,0065 3,89872 8,627951 0,451870906 26,86378 0,05217304 19,16699 0,132491 1,696981 97,19 10 0,1095 0,0065 3,80231 8,019921 0,474108152 28,3013 0,05896287 16,95982 0,117412 1,814394 103,92 11 0,116 0,0065 3,7059 7,411891 0,499993834 29,99959 0,06697153 14,93172 0,103648 1,918041 109,85
Tablo-3: Nokta Nokta Metodu Hesap Tablosu
a r n r n r 2 tan / 1 ) tan / 1 ( 1Grafik-4: w Hızlarının r‟ ye Göre DeğiĢimi w Hızlarının r'ye Göre Değişimi
0 2 4 6 8 10 12 14 16 0,051 0,0575 0,064 0,0705 0,077 0,0835 0,09 0,0965 0,103 0,1095 0,116 r(m) w (m /s )
53 Her nokta için hesaplama yapılır ve tabloda oluĢturulur. Bu tabloya göre çark çizilir. Artık kanat profilinin nokta nokta metodu tablosunda bulunmuĢ olan υ açılarına göre çizimine baĢlanabilir. Merkezden herhangi bir açıda baĢlanarak, tüm υ açıları sırası ile çizilir. Açıların bitiminden uzatılan doğrular ile o açının, ilgili olduğu bölüm daireleri kesiĢtirilerek istenen noktalar bulunur. Bulunan bu noktalar, kanatın orta ekseni üzerindeki noktalardır. Noktalar, bir pistole yardımı ile yaylarla birleĢtirilir ve böylece kanat profilinin orta ekseni oluĢturulur. Bu aĢamada, sadece bir kanat çizilmiĢtir. Tüm kanat sayısı bilindiğine göre, çıkan profilden eĢit aralıkta olmak üzere, diğer kanatlar da çizilir.
6.2.1.Minimum kanat yüzeyinin saptanması ve(zL)min kontrolü
2 2 1 2 * 2 u m C U U C tgB 0 91 , 17 47 , 29 34 , 36 02 , 16 7 , 3 * 2 B tgB olarak hesaplanır. 12 , 25 2 30 24 , 20 m
° daha önce bulunmuĢtu.
m D D L sin . 2 1 2 115 , 153 12 , 25 sin . 2 102 232
L mm yaklaĢık kanat uzunluğu.
Kanat sayısı bilindiği için t: ortalama hatvesi ve dolayısıyla t / L oranı bulunur. L z D D L t * * 2 ) ( * 2 1 49 , 0 115 , 153 * 7 * 2 ) 102 232 ( * L t 02 , 12 91 , 17 cos * 2 47 , 29 34 , 36 02 , 16 W cos * 2 2 2 1 U Cu U W
54 Grafik-5: Hareketli Dairesel Kaskad için Weinig Diyagramı
m
=25,124 ve L
t
=0,49 için; Weinig diyagramından, dairesel kaskaddaki (p p ) kaldırma katsayısı oranı bulunur
p p
'
=1,2 olarak ġekil-8‟den okunur Sirkülâsyon değerleri 68 , 1076 36 , 3 . 102 . . . 1 1 1 D Cu 2 , 21479 47 , 29 * 232 * . . 2 2 2 D Cu
p p W ZL * * 5 , 1 2 2 1 min
1885,97 2 , 1 * 02 , 12 * 5 , 1 68 , 1076 2 , 21479 2 min ZL Mm olarak bulunur. L z ZL)gerçek * ( 63 , 1071 09 , 153 . 7 ) (ZL gerçek MmĠĢletme karakteristiklerinin ve özellikle mano metrik yüksekliğin sağlanabilmesi için ( z.L )gerçek < ( z.L )min olmalıdır.
1071,63<1885,97 olduğuna göre uygundur.
Yukarıda kontrol sağlanamıyorsa, ya β1 ve β2 açılarını küçülterek L kanat boyunu büyütmek veya z kanat sayısını artırmak yoluna gidilir.
55
6.3.SALYANGOZ HESABI VE ÇĠZĠMĠ
Salyangoz içindeki akıĢın, serbest anafor kanununa uyduğu kabul edilerek hesaplar aĢağıdaki Ģekilde yürütülür:
Önce, salyangoz eĢit dilimlere bölünür ve Q debisinin çevre boyunca eĢit miktarlarda salyangoza girdiği kabul edilir. Bu uygulamada 7 kesite bölünerek 3. kesitten debinin tamamının geçtiği göz önünde tutulur. Salyangoz giriĢ çapı, çark çapından 2 - 4 mm büyük alınır. ÇıkıĢ borusunun konikliği en fazla 7º - 10° seçilir(3° seçilerek çizim buna göre yapılmıĢtır). BaĢlangıç ağzının çapı ise pratikte df <(0,2-0,3).D3 seçilmelidir. Salyangoz dilinin D3 çaplı daireye uzaklığı e = D3 / 60 alınabilir
Salyangoz hesabı için öncelikle eĢit parçaya bölünen kesitlerin debileri bulunması gerekir. 100m3/h= 27,77 l/s 1 kesitinde Q / 7 2 kesitinde 2Q / 7 3 kesitinde 3Q / 7 4 kesitinde 4Q / 7 5 kesitinde 5Q / 7 6 kesitinde 6Q / 7 7 kesitinde 7Q / 7 Q1 (L/s) 3,571428571 Q2 (L/s) 7,142857143 Q3 (L/s) 10,71428571 Q4 (L/s) 14,28571429 Q5 (L/s) 17,85714286 Q6 (L/s) 21,42857143 Q7 (L/s) 25
56 Grafik-6 Bu Ģekilde özgül hız .3/4 H Q n
eĢitliği ile bulunur, ancak dikkat edilmesi gereken önemli bir husus literatürde; n devir sayısı rpm (rotation per minute),debi gpm (galon perminute), basma yükseklik birimi de, ftp (feet) olarak alınır.
buradan özgül hız Q = 100 m3/h = 396,258075gpm H = 80 m = 229,656ft n = 3000 rpm 2 1012,28306 656 , 229 258075 , 396 3000 . 4 / 3 4 / 3 H Q n nspecific bulunur. K3= 0,43 (D3-D2)/D2=0,095
D3= 252,88 ġekil-9’ dan okunur. g
H K
C3 3 2. . olarak salyangoz hızı bulunur. 93554706 , 15 81 , 9 * 70 * 2 43 , 0 3 C m/s 3 C Q A x x 2 2 2 3 10 10 100 10 10 / / cm cm dm dm dm m L s m s L
57 Q1 (L/s) 3,571428571 A1 (cm^2) 2,24117099 R1 (cm) 0,844622331 d1 1,68924466 Q2 (L/s) 7,142857143 A2 (cm^2) 4,48234197 R2 (cm) 1,194476355 d2 2,38895271 Q3 (L/s) 10,71428571 A3 (cm^2) 6,72351296 R3 (cm) 1,46292879 d3 2,92585758 Q4 (L/s) 14,28571429 A4 (cm^2) 8,96468395 R4 (cm) 1,689244661 d4 3,37848932 Q5 (L/s) 17,85714286 A5 (cm^2) 11,2058549 R5 (cm) 1,888632947 d5 3,77726589 Q6 (L/s) 21,42857143 A6 (cm^2) 13,4470259 R6 (cm) 2,068893736 d6 4,13778747 Q7 (L/s) 25 A7 (cm^2) 15,6881969 R7 (cm) 2,234660639 d7 4,46932128
Tablo-5: Salyangoz kesit alanları (Uzunluklar cm, alanlar cm2 cinsinden)
e Salyangoz dilinin D3 çaplı daireye uzaklığı (mm) 3,866666667