Fakultas Ilmu Komputer
Universitas Brawijaya 717
Deteksi Dini Tangga Turun menggunakan Metode HOG (Histogram of Oriented Gradients) dan SVM (Support Vector Machine)
berbasis Raspberry Pi
Kezia Amelia Putri1, Fitri Utaminingrum2, Rizal Maulana3
Program Studi Teknik Komputer, Fakultas Ilmu Komputer, Universitas Brawijaya Email: 1[email protected], 2[email protected], 3[email protected]
Abstrak
Kursi Roda Elektrik atau EPW telah banyak digunakan dan semakin berkembang. Perkembangannya kini membuat EPW dapat dikontrol pergerakannya dengan kepala dan mata. Salah satu kecelakaan utama pengguna adalah jatuh dari EPW akibat tidak melihat adanya benda penghalang atau turunan.
Karena itu, EPW membutuhkan sistem untuk meningkatkan keselamatan pengguna. Penelitian sebelumnya menggunakan sensor ultrasonik untuk mendeteksi benda, namun penggunaannya kurang efektif. Sensor ultrasonik harus dipasang di sekeliling EPW agar dapat mendeteksi hambatan pada jangka luas, selain itu ultrasonik tidak dapat mendeteksi turunan. Oleh sebab itu, kamera mulai digunakan untuk mendeteksi objek. Penelitian ini juga menggunakan kamera dan metode pengolahan citra digital untuk mendeteksi turunan tangga dan memberikan bunyi peringatan dari speaker. Metode yang digunakan adalah HOG untuk ekstrasi fitur dan SVM untuk klasifikasi. Pre-processing terdiri dari memotong gambar, mengubah ukuran, dan menghilangkan noise. Jumlah fitur yang digunakan tiap data adalah 3.780 fitur dari gambar ukuran 128x64 piksel. Akurasi sistem dalam mengenali objek adalah 80% dan rata-rata waktu komputasinya adalah 0,679672 detik.
Kata kunci: pengolahan citra digital, kursi roda elektrik, Histogram of Oriented Gradients, Support Vector Machine
Abstract
Electric Powered Wheelchairs or EPW has been used for many disable patients and still developing.
EPW was developing to achieve flexibility to control its movement. EPW can be moved by eyes and head nowadays. One of the main accidents that often occurred to EPW’s user is falling from EPW due to some obstacles that blocking the road or some descents such as stair descent which user did not see before. Hence, EPW needs a system to increase the user’s safety. In previous research ultrasonic sensors were used to detect objects. But it needed a lot of sensors to detect obstacles on wide range and did not able to detect descents. Regarding that, researchers began to use camera to detect obstacles. This research use image processing methods to detect stair descent and generate warning sound through a speaker. HOG was used as a method to extract features from data and SVM algorithm as machine learning classifier. Pre-processing such as cropping, resizing, and blurring were used. Total features for each data were 3.780 features which generated from an image with 128x64 pixel size. This system had 80% accuracy of recognizing object and had 0,679672 second average computation.
Keywords: image processing, electric powered wheelchairs, Histogram of Oriented Gradients, Support Vector Machine
1. PENDAHULUAN
Kursi Roda Elektrik atau EPW adalah salah satu alat yang membantu penyandang disabilitas atau pengguna agar dapat melakukan mobilisasi.
Kemampuan berpindah tempat secara mandiri bagi pengguna kursi roda menjadi sebuah nilai
kebebasan yang penting (Abdulatif, et al., 2017).
Nilai ini mendorong pengembangan EPW menjadi sebuah alat yang fleksibel. Kini, EPW dapat digerakkan dengan kepala, mata, dan tangan penggunanya. Kemampuan mobilitas yang beragam ini harus diimbangi dengan peningkatan pengamanan. Pengguna sangat
membutuhkan EPW yang memiliki kemampuan untuk mengurangi resiko jatuh atau kehilangan kontrol (Abdulatif, et al., 2017). Penghalang pada jalan menjadi salah satu penyebab kecelakaan bagi pengguna. Penghalang dapat berupa benda-benda berwujud seperti kursi, meja, lemari, tangga, dan sebagainya. Sistem untuk mendeteksi objek diperlukan untuk meningkatkan faktor keselamatan. Sensor ultrasonik dapat dipakai untuk deteksi objek.
Namun, penggunaan sensor ini cukup banyak karena harus diletakkan di setiap sisi kursi roda agar dapat mendeteksi objek dengan jangkauan yang luas. Kekurangan lain dari sensor ultrasonik adalah tidak bisa mendeteksi tangga turun (Johan, et al., 2019). Hal ini mendorong pengembangan penelitian menggunakan kamera dan metode pengolahan citra digital serta machine learning.
Pengolahan citra digital dan machine learning telah banyak digunakan untuk mendeteksi objek. Penelitian yang dilakukan oleh (Joseph & Pradeep, 2017) mendeteksi objek yaitu wajah dengan menggunakan metode ekstrasi fitur Histogram of Oriented Gradients atau HOG dan algoritme klasifikasi Support Vector Machine atau SVM dengan kernel RBF.
Penelitian ini juga membandingkan kecepatan yang dihasilkan metode HOG-SVM dengan metode Superpixel. Hasilnya, akurasi dari metode ini yaitu 97% dan memiliki kecepatan atau waktu tracking sebesar 714,0668 detik yang lebih cepat daripada milik metode Superpixel yaitu 5672,456782 detik.
Penelitian ini mengacu pada beberapa penelitian sebelumnya. Salah satunya adalah penelitian oleh (Hermulyani, et al., 2015).
Penelitian ini bertujuan untuk membantu tunanetra dengan sebuah sistem untuk mendeteksi tangga. Sistem yang digunakan terdiri dari komponen perangkat keras kamera Raspi, sistem minimum Raspberry Pi 2, dan speaker. Metode pengolahan citra yang digunakan adalah ekstrasi fitur dengan Hough Transform dan algoritme klasifikasi SVM.
Akurasi yang dihasilkan sistem adalah 83%
untuk data siang hari. Sistem ini memiliki rata- rata waktu komputasi selama 4,8421 detik.
Penelitian lain yang menjadi acuan adalah penelitian milik (Johan, et al., 2019). Penelitian ini memiliki tujuan yang sama dengan penelitian yang diusulkan, yaitu untuk mendeteksi tangga turun guna meningkatkan keselamatan pengguna kursi roda. Penelitian tersebut menggunakan metode ekstrasi fitur Gray Level Co-occurrence
Matrix atau GLCM dan algoritme klasifikasi Learning Vector Quantization. Akurasi yang dihasilkan adalah 92,5% dengan rata-rata waktu komputasi yaitu 0,02779 detik.
Pada penelitian yang diajukan ini, metode ekstrasi fitur menggunakan HOG dan klasifikasi dengan SVM kernel RBF. Sistem mendeteksi tangga turun sebagai kelas positif dan lantai sebagai kelas negatif. Sistem akan terdiri dari tiga komponen perangkat keras yaitu kamera Raspi, sistem minimum Raspberry Pi 3 Model B, dan speaker. Dimana speaker akan mengeluarkan bunyi peringatan (ON) saat sistem mendeteksi tangga turun dan diam (OFF) saat objek terdeteksi sebagai lantai. HOG dipilih karena antara lantai dan tangga turun terdapat perbedaan gradien yang dapat diekstrasi oleh HOG.
2. PERANCANGAN DAN IMPLEMENTASI
Gambaran sistem, perancangan, dan implementasi akan dibahas pada bab ini.
2.1. Gambaran Umum Sistem
Sistem ini akan mendeteksi tangga turun dan memberikan bunyi peringatan guna meningkatkan kewaspadaan dan keselamatan pengguna EPW. Sistem terdiri dari tiga komponen (perangkat keras) utama yaitu kamera Raspi sebagai sensor untuk menangkap gambar digital kondisi jalan, sistem minimum untuk melakukan komputasi yaitu Raspberry Pi 3 Model B, dan sebuah aktuator yang dapat mengeluarkan bunyi peringatan yaitu speaker.
Blok diagram sistem perangkat keras terdapat pada Gambar 3.
Gambar 1. Blok Diagram Sistem
Data yang menjadi input adalah citra digital dari kondisi jalan. Contoh data kelas Tangga Turun atau kelas positif dapat dilihat pada Gambar 4. Gambar (a) adalah citra sebelum dipotong dan (b) setelah dipotong. Sistem akan memroses gambar yang telah dipotong.
Gambar 2. Data Tangga Turun (a) dan (b)
Data kelas Lantai atau kelas negatif dapat dilihat pada Gambar 5.
Gambar 3. Data Lantai (a) dan (b)
Keluaran atau output sistem berupa bunyi peringatan. Jika sistem mendeteksi objek sebagai Tangga Turun maka kondisi speaker akan ON, artinya speaker mengeluarkan bunyi.
Sebaliknya, jika objek terdeteksi sebagai Lantai maka speaker akan OFF atau diam.
2.2. Perancangan Sistem
Perancangan sistem ini terdiri dari perancangan perangkat keras dan perangkat lunak. Perancangan perangkat keras dapat dilihat pada diagram blok sistem Gambar 3.
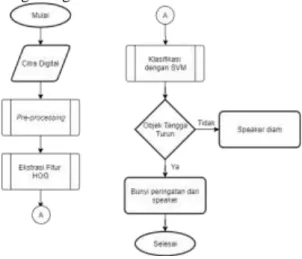
Perancangan perangkat lunak dapat dilihat pada diagram alir Gambar 6. Input citra digital yang diakuisisi oleh kamera Raspi akan diproses oleh Raspberry Pi.
Proses pertama adalah subproses pre- processing yang terdiri dari memotong citra, mengubah ukuran, dan menghilangkan noise.
Citra dipotong pada koordinat (40,400) sampai (440,550). Contoh hasil pemotongan dapat dilihat pada Gambar 4 dan Gambar 5. Lalu ukuran citra diubah menjadi skala 2x1.
Penelitian ini mengubah citra menjadi 3 ukuran yang masing-masing akan diuji akurasinya.
Ukuran tersebut adalah 128x64, 256x128, dan 400x200 piksel. Setelah ukuran citra diubah, citra akan difilter dengan Median Filter untuk menghilangkan noise.
Gambar 4. Diagram Alir Program
Proses kedua adalah ekstrasi fitur HOG.
Jumlah fitur HOG yang dihasilkan masing- masing ukuran berturut-turut yaitu 3780, 16740, dan 42336 fitur. Proses ketiga adalah klasifikasi dengan SVM. SVM akan melakukan training terlebih dahulu untuk membentuk sebuah model SVM. Model SVM untuk tiap ukuran citra akan berbeda. Setelah model terbentuk, sistem dapat diuji dengan data uji. Jika sistem mendeteksi objek sebagai Tangga Turun maka speaker ON.
Sedangkan jika mendeteksi objek sebagai Lantai maka speaker OFF. Subproses ekstrasi fitur HOG dan klasifikasi dengan SVM akan dijelaskan pada subbab berikut.
2.2.1 Ekstrasi Fitur HOG
Histogram of Oriented Gradients (HOG) adalah metode untuk mencari karakteristik dari objek dengan distribusi intensitas gradien tanpa mengetahui posisi pasti gradien atau tepi (Dalal
& Triggs, 2005). Metode ini membagi citra pada tiap block. Lalu tiap block dibagi lagi menjadi cell. Penjelasan ini menggunakan block 16x16 piksel dan cell 8x8 piksel. Diagram alir dapat dilihat pada Gambar 5.
Gambar 5. Diagram Alir Ekstrasi Fitur HOG Langkah untuk mendapatkan fitur dengan HOG yaitu pertama mengatur ukuran citra masukan dan melakukan filter. Citra harus memiliki skala 2x1 atau 1x2. Jenis filter yang dipakai adalah Sobel. Kedua adalah menghitung nilai atau magnitude (G) dan orientasi (R) gradien dengan persamaan:
𝑀𝑎𝑔𝑛𝑖𝑡𝑢𝑑𝑒 (𝐺) = √(𝐺𝑥)2+ (𝐺𝑦)2 (3) 𝑂𝑟𝑖𝑒𝑛𝑡𝑎𝑠𝑖 (𝑅0) = 𝑎𝑟𝑐𝑡𝑎𝑛𝐺𝑦
𝐺𝑥 (4)
𝐺𝑥 adalah gradien pada sumbu x dan 𝐺𝑦 pada sumbu y. Ketiga adalah membuat histogram dari magnitude dan orientasi gradien dari cell 8x8.
Histogram terdiri dari 9 bin. Keempat adalah
normalisasi block. Jenis normalisasi dan masing- masing persamaannya yaitu:
𝐿1− 𝑛𝑜𝑟𝑚: 𝑣′ = 𝑣
√‖𝑣‖1+𝜀 (5)
𝐿2− 𝑛𝑜𝑟𝑚: 𝑣′′ = 𝑣′
√‖𝑣′‖22+𝜀2
(6)
𝑣 adalah fitur blok yang memiliki histogram, 𝜀 adalah konstanta dengan nilai 0,1. Kelima adalah menghitung fitur vektor HOG. Caranya dengan menggabungkan vektor ukuran 36x1 menjadi sebuah vektor array.
2.2.2. Klasifikasi dengan SVM
Support Vector Machine (SVM) adalah metode untuk klasifikasi pola yang diusulkan oleh (Cortes & Vapnik, 1995). SVM akan mencari hyperplane atau garis pemisah optimal untuk memisahkan data input. Visualisasi SVM dapat dilihat di Gambar 6.
Gambar 6. Hyperplane Pemisah Data Sumber: (Abe, 2010)
Terdapat dua jenis persamaan hyperplane.
Pertama adalah hyperplane pada SVM linear, dengan persamaan:
𝐷(𝑥) = 𝑤 ∙ 𝑥 + 𝑏 (7)
𝑤 adalah bobot, 𝑥 adalah data input, dan 𝑏 adalah bias. Kedua adalah persamaan yang menggunakan kernel untuk membentuk hyperplane, yaitu:
𝐷(𝑥) = ∑𝑀𝑖=1𝑎𝑖𝑦𝑖𝐾(𝑥, 𝑥𝑖)+ 𝑏 (8) Variabel 𝑎 adalah Lagrange multiplier dan 𝑦 adalah kelas dari data. Kernel atau 𝐾(𝑥, 𝑥𝑖) adalah persamaan untuk menghitung dot- product data latih tanpa perlu trasnformasi data menjadi data dimensi tinggi (Kowalczyk, 2017).
Beberapa jenis kernel dengan persamaannya yaitu:
• Kernel Linear
𝐾(𝑥, 𝑥′) = 𝑥 ∙ 𝑥′ (9)
• Kernel Polynomial
𝐾(𝑥, 𝑥′) = (𝑥 ∙ 𝑥′+ 𝑐)𝑑 (10)
• Kernel RBF atau Gaussian
𝐾(𝑥, 𝑥′) = exp(−𝛾(‖𝑥 − 𝑥′‖2)) (11) 𝛾 adalah gamma yang mengatur generalisasi SVM.
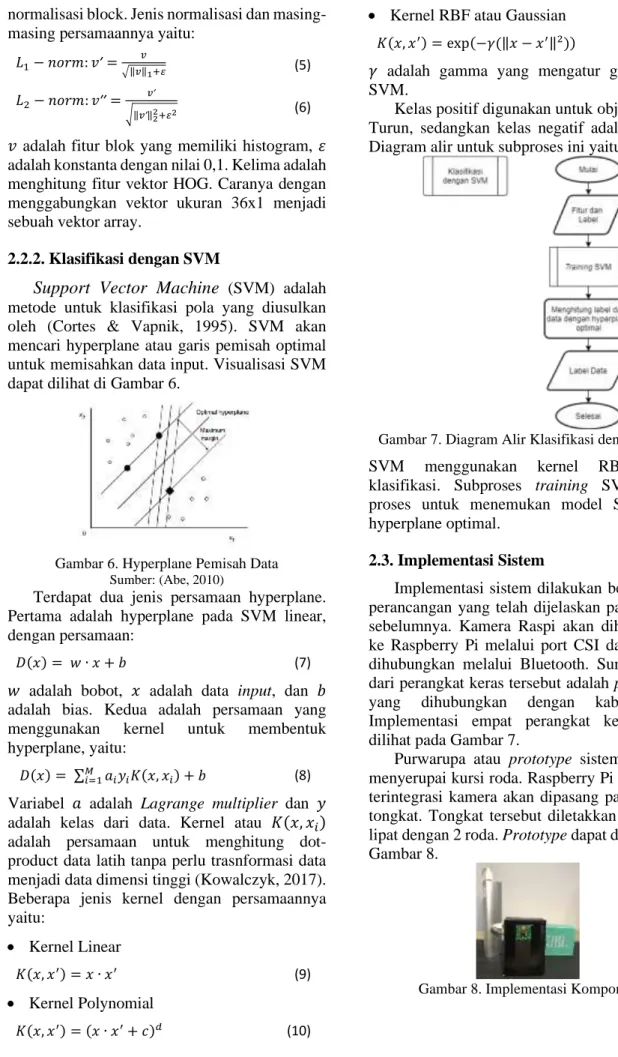
Kelas positif digunakan untuk objek Tangga Turun, sedangkan kelas negatif adalah Lantai.
Diagram alir untuk subproses ini yaitu:
Gambar 7. Diagram Alir Klasifikasi dengan SVM SVM menggunakan kernel RBF untuk klasifikasi. Subproses training SVM berisi proses untuk menemukan model SVM atau hyperplane optimal.
2.3. Implementasi Sistem
Implementasi sistem dilakukan berdasarkan perancangan yang telah dijelaskan pada bagian sebelumnya. Kamera Raspi akan dihubungkan ke Raspberry Pi melalui port CSI dan speaker dihubungkan melalui Bluetooth. Sumber daya dari perangkat keras tersebut adalah powerbank yang dihubungkan dengan kabel USB.
Implementasi empat perangkat keras dapat dilihat pada Gambar 7.
Purwarupa atau prototype sistem dibentuk menyerupai kursi roda. Raspberry Pi yang telah terintegrasi kamera akan dipasang pada sebuah tongkat. Tongkat tersebut diletakkan pada troli lipat dengan 2 roda. Prototype dapat dilihat pada Gambar 8.
Gambar 8. Implementasi Komponen
Gambar 9. Prototype Sistem Tampak Depan 3. PENGUJIAN DAN ANALISIS
Pengujian dilakukan untuk mengetahui performa dari sistem. Pengujian yang dilakukan ada empat. Pengujian dari 3 ukuran citra, pengujian deteksi pada Citra 2D dan Video, pengujian waktu komputasi deteksi pada Citra 2D dan Video, dan pengujian hasil integrasi deteksi terhadap nyala speaker. Akurasi dari pengujian dihitung dengan persamaan:
𝐴𝑘𝑢𝑟𝑎𝑠𝑖 (%) =𝐽𝑚𝑙.𝐷𝑎𝑡𝑎 𝐵𝑒𝑛𝑎𝑟
𝑇𝑜𝑡𝑎𝑙 𝐷𝑎𝑡𝑎 × 100% (12) 3.1. Pengujian Ukuran Citra
Pengujian ini bertujuan untuk mengetahui ukuran apa yang memiliki akurasi terbaik dan akan diimplementasikan dalam sistem.
Pengujian menggunakan data Citra 2D yang dilakukan sebanyak 8 kali. Komputasi dilakukan di laptop. Setiap pengujian menggunakan 20 gambar yang terdiri dari 10 gambar untuk masing-masing kelas. Sehingga tiap kelas memiliki 80 gambar dan total data untuk dua kelas adalah 160 gambar. Tabel 1 berisi rata-rata akurasi dan rata-rata waktu komputasi dari setiap ukuran yang diuji.
Tabel 1. Rata-Rata Akurasi Pengujian Ukuran Citra Ukuran Akurasi Waktu Komputasi
128x64 88,25% 0,04218
256x128 73% 0,16894
400x200 51% 0,44375
Ukuran 128x64 piksel memiliki akurasi tertinggi yaitu 88,25%. Oleh sebab itu, pengujian yang dilakukan selanjutnya akan menggunakan ukuran citra 128x84 piksel.
3.2. Pengujian pada Citra 2D dan Video Pengujian dilakukan untuk mendapatkan akurasi dari 2 jenis data yaitu Citra 2D dan Video. Citra 2D terdiri dari 160 gambar hasil foto dan Video terdiri dari 5 rekaman video yang memiliki beberapa frame. Pengujian dilakukan
pada Raspberry Pi. Hasil pengujian dapat dilihat pada Tabel 2.
Tabel 2. Hasil Akurasi Deteksi pada Citra 2D dan Video
Jenis Data Jumlah Data
(Gambar/Frame) Akurasi
Citra 2D 160 88%
Video 1 194 92%
Video 2 483 72%
Video 3 169 77%
Video 4 400 57%
Video 5 391 86%
Akurasi tertinggi dihasilkan oleh Video 1 sedangkan akurasi terendah dihasilkan Video 4.
Rata-rata akurasi untuk pengujian ini adalah 78,7%. Kondisi lantai dan tangga turun memiliki peran penting dalam proses deteksi. Tangga turun yang tidak memiliki pembatas yang mencolok antar anak tangganya banyak yang diklasifikasikan sebagai Lantai. Sebaliknya, lantai yang memiliki warna keramik yang berbeda atau garis antar keramik yang mencolok akan diklasifikasi sebagai Tangga Turun.
3.3. Pengujian Waktu Komputasi Citra 2D dan Video
Pengujian dilakukan untuk mengetahui rata- rata waktu komputasi pada proses deteksi data Citra 2D dan Video. Jumlah data yang diproses sama dengan subbab sebelumnya. Waktu komputasi memiliki satuan detik. Hasil waktu komputasi dapat dilihat pada Tabel 3.
Tabel 3. Rata-Rata Waktu Komputasi pada Citra 2D dan Video
Jenis Data
Jumlah Data (Gambar/Frame)
Waktu Komputasi
Citra 2D 160 0,428459
Video 1 194 0,433211
Video 2 483 0,433583
Video 3 169 0,442773
Video 4 400 0,470887
Video 5 391 0,4704
Rata-rata waktu komputasi adalah 0,446552 detik. Waktu komputasi ini dapat ditingkatkan jika menggunakan prosesor dengan kapasitas lebih tinggi daripada Raspberry Pi 3 Model B.
3.4 Pengujian Integrasi Deteksi Terhadap
Nyala Speaker
Pengujian dilakukan secara langsung pada lima lokasi yang berbeda. Pengujian akan dilakukan sebanyak lima kali pada tiap lokasi.
Tiap kelas akan diuji sebanyak dua kali. Tabel 4 dan Tabel 5 menampilkan rata-rata akurasi di tiap lokasi pada kelas Tangga Turun.
Tabel 4. Akurasi Deteksi Tangga Turun (1) Lokasi Akurasi Kondisi Speaker
Lokasi I 80% Sesuai
Lokasi II 60% Sesuai
Lokasi III 60% Sesuai
Lokasi IV 80% Sesuai
Lokasi V 80% Sesuai
Rata-rata akurasi untuk semua lokasi pada Tangga Turun (1) adalah 72%.
Tabel 5. Akurasi Deteksi Tangga Turun (2) Lokasi Akurasi Kondisi Speaker
Lokasi I 80% Sesuai
Lokasi II 60% Sesuai
Lokasi III 80% Sesuai
Lokasi IV 80% Sesuai
Lokasi V 60% Sesuai
Rata-rata akurasi untuk semua lokasi pada Tangga Turun (2) adalah 72%.
Tabel 6 dan Tabel 7 menampilkan rata-rata akurasi di tiap lokasi pada kelas Lantai.
Tabel 6. Akurasi Deteksi Lantai (1) Lokasi Akurasi Kondisi Speaker
Lokasi I 60% Sesuai
Lokasi II 100% Sesuai
Lokasi III 100% Sesuai
Lokasi IV 80% Sesuai
Lokasi V 100% Sesuai
Rata-rata akurasi untuk semua lokasi pada Lantai (1) adalah 88%.
Tabel 7. Akurasi Deteksi Lantai (2) Lokasi Akurasi Kondisi Speaker
Lokasi I 80% Sesuai
Lokasi II 100% Sesuai
Lokasi III 100% Sesuai
Lokasi IV 100% Sesuai
Lokasi V 60% Sesuai
Rata-rata akurasi untuk semua lokasi pada Lantai (2) adalah 88%.
Rata-rata akurasi untuk semua hasil pengujian adalah 80%. Kondisi “Sesuai” pada speaker berarti selama pengujian, speaker memiliki kondisi yang tepat sesuai dengan hasil deteksi sistem. Dimana saat sistem mendeteksi objek sebagai Tangga Turun maka speaker akan ON, begitu pula saat objek terdeteksi sebagai Lantai maka speaker akan OFF. Akurasi di bawah rata-rata didapatkan karena kondisi tangga turun yang tidak memiliki garis batas dengan warna atau desain berbeda sehingga sistem mendeteksi objek tersebut sebagai
“Lantai”. Sebaliknya, lantai yang garis antar keramiknya terlihat mencolok maka akan terdeteksi sebagai “Tangga Turun”. Gambar 9 adalah visualisasi hasil deteksi dari sistem.
Gambar 10. Hasil Deteksi Sistem
4. PENUTUP
Ukuran citra sebagai data masukan pada ekstrasi fitur HOG memengaruhi akurasi deteksi. Ukuran citra dengan akurasi tertinggi didapatkan oleh ukuran 128x64 piksel dengan akurasi 88,25%. Sistem ini dapat mendeteksi data Citra 2D yaitu gambar hasil foto dan Video rekaman dengan dengan rata-rata akurasinya mencapai 78,7%. Rata-rata waktu komputasi yang dihasilkan sistem untuk data Citra 2D dan Video adalah 0,446552 detik. Akurasi dan rata- rata waktu komputasi sistem saat deteksi objek secara langsung adalah 80% dan 0,679672 detik.
Sistem memiliki integrasi yang baik dengan speaker, dimana speaker akan ON saat sistem mendeteksi objek sebagai Tangga Turun dan akan OFF saat objek terdeteksi sebagai Lantai.
Terdapat tiga hal yang dapat diperbaiki dan menjadi masukan untuk penelitian selanjutnya.
Pertama, memperbanyak variasi dan jumlah data latih kelas positif dan negatif. Kedua, menggunakan metode pre-processing yang dapat mengatasi perbedaan warna, garis yang mencolok, dan tekstur yang berbeda pada data.
Ketiga, menggunakan prosesor dengan kapasitas komputasi yang lebih besar daripada Raspberry Pi 3 Model B.
5. DAFTAR PUSTAKA
Abdulatif, S. et al., 2017. Stairs Detection for Enchancing Wheelchairs Capabilities Based on Radar Sensors. Nagoya, IEEE, pp. 1-5.
Abe, S., 2010. Support Vector Machines for Pattern Classification. Kobe: Springer, London.
Cortes, C. & Vapnik, V., 1995. Support Vector Network. Machine Learning, Volume 20, pp. 273-297.
Dalal, N. & Triggs, B., 2005. Histograms of Oriented Gradients for Human Detection.
San Diego, IEEE, pp. 886-893.
Hermulyani, Z., Hidayat, B. & Sunarya, U., 2015. Perancangan dan Implementasi Deteksi Tangga Sebagai Alat Bantu. e- Proceeding of Engineering, Volume 2, p.
6988.
Johan, A. W. S. B., Utaminingrum, F. & Shih, T.
K., 2019. Stair Descent Identification for Smart Wheelchair by Using GLCM and Learning Vector Quantization.
Joseph, S. & Pradeep, A., 2017. Object Tracking using HOG and SVM. "Object Tracking using HOG and SVM", International Journal of Engineering Trends and Technology (IJETT), Volume 48, pp. 321- 325.
Kowalczyk, A., 2017. Support Vector Machines Succinctly. Morrisville: Syncfusion.